Description: SoftBank is said to be weighing a deal with Gravis Robotics, the ETH Zurich spinout making excavators drive themselves. Terms are undisclosed.
Description: New attachment, developed with Monolix, lets PUDU T300 tow existing cage carts without modification and automate post-unloading transport.
Description: UBTECH launches UWORLD and U1 humanoid robots, bringing factory-proven robotics technology into homes for everyday use.
Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Male and female U1 humanoids feature lifelike silicone skin, realistic hair, and 88 DoF for natural movement. Chinese robotics company UBTECH has launched UWORLD, a new consumer-focused brand, along with its U1 series of humanoid robots. The move marks the company’s expansion from industrial automation into the home robotics market. UBTECH spent years developing full-size humanoids for factories and warehouses, where manufacturers including NIO and FAW-Volkswagen have used its robots. The U1 series brings technologies developed for safe human interaction, precision work, and autonomous operation in complex industrial environments into everyday household settings. In March 2025, UBTECH and Siemens partnered to accelerate humanoid robot production, targeting an annual manufacturing capacity of 10,000 units by 2026. The Shenzhen-based robotics firm recently unveiled the U1 series under its newly created consumer brand, UWORLD. The new series represents a dramatic departure from UBTECH’s traditional focus on industrial humanoid robots deployed in factories and warehouses. Although the lifelike androids are expected to cost around $30,000, interest has been high. Pre-orders opened on JD.com on June 2, requiring a 3,000 yuan (about $450) deposit, and the company reported more than 2,100 reservations within the first week. Early customers are expected to receive deliveries beginning in mid-September, while a full public launch event is scheduled for June 30, reports Gazgoo. Over the past several years, the company has supplied advanced humanoid systems for major manufacturers, including Airbus, Texas Instruments, NIO, ZEEKR, Dongfeng Liuzhou Motor, and FAW-Volkswagen. The technologies developed for those demanding industrial environments now form the foundation of the company’s first consumer-oriented humanoids. UBTECH is offering both male and female versions of the U1. The male model stands 183 centimeters (6 feet) tall, while the female version measures 168 centimeters (5 feet 6 inches). Both feature lifelike silicone skin, realistic hair, expressive facial features, and an impressive 88 degrees of freedom throughout the body. This allows coordinated movement of the arms, legs, hands, neck, chest, and torso, creating highly natural-looking motions, reports Techeblog. Promotional videos released by the company showcase the robots in cinematic settings, highlighting their realistic appearance. Close-up shots reveal detailed skin textures, natural-looking hair, subtle facial expressions, and reflective eyes designed to enhance their humanlike presence. UBTECH claims to experience strong early demand for its new line of ultra-realistic humanoid companions, marking a major expansion beyond the industrial robotics market that helped establish the company’s reputation. Rather than focusing on physical labor, the U1 series is designed primarily for social interaction and emotional companionship. The robots use onboard artificial intelligence to maintain conversations, recognize moods, and adapt their responses to users. According to UBTECH, the system can analyze facial expressions, tone of voice, and speaking patterns to estimate emotional states and adjust conversations accordingly. When users appear stressed or unhappy, the robot can offer supportive dialogue or attempt to guide interactions in a more positive direction. The company also emphasizes privacy. Personal memories and conversation data are stored locally with encryption, and owners can customize both the appearance and personality traits of their robot over time. However, UBTECH has deliberately limited the platform’s capabilities. The robots can sit, stand, walk on flat indoor surfaces, and engage in conversation. Still, they are not intended to perform household chores or navigate challenging environments such as stairs or uneven terrain. Users also cannot freely program new behaviors or functions. UBTECH’s move into consumer robotics is backed by growing momentum in its humanoid robot business. The company reported that revenue from its full-size embodied intelligent humanoid robot products and solutions reached 821 million yuan in 2025, more than 22 times higher than the previous year. The segment accounted for 41.1 percent of total company revenue, up from just 2.7 percent a year earlier, while cumulative deliveries reached 1,079 units, reports Gazgoo. According to reports, by leveraging technologies originally developed for industrial automation, UBTECH is betting that realistic humanoid companions could become the next major category in consumer robotics. Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Images (10):
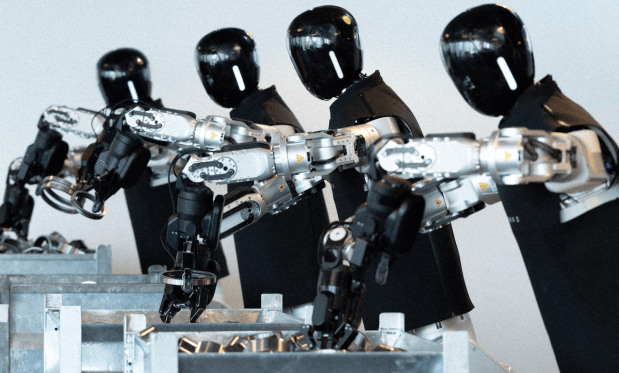
'Workhorse' humanoid robots from Ningbo head to global markets
(ECNS) -- A humanoid robot innovation center in Ningbo, east China's Zhejiang Province, is developing practical robots for industrial and commercial applications, with one model already deployed at a European home appliance manufacturer's plant. Established in December 2023, the Zhejiang Humanoid Robot Innovation Center is supported by the Ningbo municipal government and a team led by Professor Xiong Rong of Zhejiang University. The center focuses on developing embodied intelligence technologies and humanoid robots for industrial use. "Our goal is not to create showpiece robots that perform flashy tricks," said Xiong, the center's chief scientist. "We want to build robots that can carry out real work, particularly precision tasks that are difficult to automate, labor-intensive or potentially dangerous." The center has developed the NAVIAI product range. In retail environments, NAVIAI robots can serve as "smart store managers," retrieving products from shelves. In chemical laboratories, they can complete entire workflows, including sampling, pretreatment, analysis and cleaning. One model, the NAVIAI-I2 bipedal humanoid robot, has achieved positioning accuracy of 0.03 millimeters. It has been deployed at the Turkish production facility of European home appliance brand Beko, making it one of the first Chinese-made humanoid robots to enter overseas markets. "We built a simulated production line at the center, completed all the necessary testing and then shipped the robots to Turkey for deployment. The overall cooperation has progressed smoothly," said Xu Xuecheng, vice general manager and chief technology officer of the center. "Feedback from the production site is also helping us further refine our products." With demand for automation growing across labor-intensive industries in Southeast Asia, the center is confident about expanding its presence in overseas markets, Xu added. The center has formed an industry alliance comprising 88 suppliers in Ningbo and more than 200 nationwide. Alongside the center's development, Ningbo has accelerated its expansion into the embodied intelligence sector, aiming to establish an ecosystem integrating AI models, hardware manufacturing and a wide range of practical applications. (By Tang Yuxian) China In Photos: Xinjiang deploys 108-arm robot for cotton topping Hefei builds 'custom factory' for robot components Beijing's service robot output surges 230% in H1
Images (10):
When a district in Florida's Everglades used robot rabbits to …
Description: Tech News News: Florida held its annual Python Challenge just a few weeks ago. The 10-day competition brings together professional and amateur hunters to track and re.
Content:
The TOI Tech Desk is a dedicated team of journalists committed to delivering the latest and most relevant news from the world of technology to readers of The Times of India. TOI Tech Deskâs news coverage spans a wide spectrum across gadget launches, gadget reviews, trends, in-depth analysis, exclusive reports and breaking stories that impact technology and the digital universe. Be it how-tos or the latest happenings in AI, cybersecurity, personal gadgets, platforms like WhatsApp, Instagram, Facebook and more; TOI Tech Desk brings the news with accuracy and authenticity.Read More â¹8,999 â¹9,999 â¹14,999 â¹15,276 â¹13,999 â¹16,499 â¹16,979 â¹15,844 â¹10,298 â¹28,999 â¹13,499 â¹12,999 â¹15,490 â¹15,999 â¹9,999 â¹7,999 â¹10,358 â¹11,699 â¹12,499 â¹17,999 â¹14,499 â¹17,500 â¹17,835 â¹16,863
Images (10):
China's new humanoid robot offers 98% success rate, handles EV …
Description: Xiaomi's humanoid robot reaches 98 percent assembly success, adds new factory tasks, and moves closer to human-level performance.
Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. The robots also added two new factory tasks, achieving a 90 percent success rate in both sorting and recycling operations. Xiaomi has reported new progress in deploying its humanoid robot on an automotive production line, with the machine achieving near-human performance after four months of improvements. The robot’s success rate at a self-tapping nut loading station has reached 98 percent, reducing the gap with human workers’ qualification rate to just one percentage point. The company also introduced two new manufacturing tasks—center console side panel sorting and parts bin folding and recycling—both reaching 90 percent success, including the robot’s first long-duration handling of flexible workpieces in a car factory. In March 2026, Xiaomi announced that it had deployed humanoid robots in electric vehicle (EV) assembly operations in China, with it recording a success rate of 90.2 percent. Xiaomi has announced significant progress in deploying its humanoid robot on an automotive production line, reporting improved performance across multiple manufacturing tasks after four months of continuous development and optimization. According to the company, the robot’s success rate at a self-tapping nut loading station has increased from 90.2 percent to 98 percent, bringing its qualification rate to within just one percentage point of that achieved by human workers. The improvement reflects ongoing refinements to the robot’s perception, manipulation, and task execution capabilities in a real factory environment, reports Technode. Xiaomi has also expanded the robot’s responsibilities by introducing two additional production tasks: center console side panel sorting and parts bin folding and recycling. Both tasks have reached a success rate of 90 percent, demonstrating the robot’s ability to perform a wider range of assembly and logistics operations on the factory floor. The center console side panel sorting application represents a notable milestone, as Xiaomi says it is the first time a humanoid robot has carried out long-duration continuous operations involving flexible workpieces in an automotive factory. Handling flexible components is generally more challenging than rigid parts because they can deform, shift position, and require more precise perception and manipulation. In recent times, rival robotics firms like Figure and AgiBot have both used extended livestreams to demonstrate the real-world capabilities and reliability of their humanoid robots, shifting the focus from short promotional videos to continuous, unedited factory operations. Figure streamed its Figure 02 humanoid performing logistics and warehouse-style tasks for more than 20 hours continuously. During the demonstration, the robot autonomously handled repetitive pick-and-place operations, transporting items between workstations while adapting to changing object positions. The livestream highlighted the robot’s ability to operate for long periods with minimal human intervention, although Figure did not disclose a formal task success rate. Instead, the company emphasized consistent autonomous performance, fleet management, and long-duration reliability as key milestones toward commercial deployment. AgiBot has conducted several large-scale factory livestreams showcasing its humanoid robots in real manufacturing environments. In one widely reported demonstration, the company’s G2 humanoid operated for 64 consecutive hours on a tablet production line, completing 64,828 manufacturing tasks and contributing to the production of 17,625 tablets. AgiBot reported an overall 99.99 percent task success rate, making it one of the most detailed public demonstrations of humanoid robot reliability in industrial production. More recently, AgiBot showcased further progress with humanoid robots performing automotive assembly tasks. After four months of optimization, the robots achieved a 98 percent success rate in self-tapping nut loading and 90 percent success rate in center console side panel sorting and parts bin folding and recycling, highlighting continued improvements in manufacturing performance. Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Description: The South Korean conglomerate said the RX, or "Robotics eXperience", division will oversee its mid-to-long-term robotics strategy, core technology development and business execution
Description: -Humanoid, a UK-based AI and robotics company building industrial humanoid robots, announced a $152 million Series A financing at a $1.35 billion post-money ...
Description: Samsung Electronics has created a new robotics division as it tries to turn robots into a major future growth business. The new unit is called RX, short
Description: The new RX, or Robotics eXperience, unit will report directly to CEO TM Roh and establish research hubs in the U.S., China, and Japan
Content:
Oops, something went wrong Samsung Electronics announced Tuesday the launch of a dedicated robotics division — called RX, short for Robotics eXperience — bringing together the company's work in the field as it searches for fresh engines of growth. CEO TM Roh will oversee the division directly, the company said. Executive Vice President Lee Dongkun, who previously led robotics strategy at Hyundai Motor Group — including oversight of Boston Dynamics — will head the Robotics Strategy Team, according to Reuters. According to the company, RX will be responsible for steering robotics strategy over the medium and long term, spanning everything from foundational technology work to bringing products to market. Samsung said it intends to open robotics research outposts in the U.S., China, and Japan, positioning itself to tap into the talent and industry networks those markets offer. Samsung stock rose 6.76% on the news, while the Kospi index was up about 4%. Samsung said humanoid robots are central to its plans, with the goal of boosting both output and end-user experience — beginning on factory floors and eventually reaching homes and retail settings. The company pointed to rapid progress in physical AI as a key factor improving the commercial prospects for robotics. The announcement follows a series of moves that signal a broader robotics push. Earlier this month, Roh said at a briefing in Jinju that Samsung plans to invest around 60 trillion won ($40.7 billion) in the Yeongnam region. Of that total, 19 trillion won is designated for Gumi — in partnership with Samsung SDS — to develop physical AI infrastructure and humanoid robot manufacturing facilities, the company said. Samsung also raised its stake in local firm Rainbow Robotics in late 2024 to become its largest shareholder. On its January earnings call, Samsung told investors it expected to have concrete progress to show in humanoid robotics before the year was out, according to Reuters. In April, Samsung indicated it was open to dealmaking — including potential acquisitions — to speed up its robotics push, alongside collaborations with domestic firms on underlying technology. Samsung has been navigating a period of significant capital commitments alongside strong financial performance. The company posted a preliminary second-quarter operating profit of 89.4 trillion won — roughly 19 times its year-earlier result — even as investors weighed the scale of its spending plans, including a separate 400 trillion won investment in a new semiconductor manufacturing hub in southwestern South Korea.
Images (2):
PYMNTS | Humanoid Raises $152 Million to Expand Robotics Company
Description: U.K.-based robotics firm Humanoid says it is now a $1 billion company after raising $152 million in a Series A round.
Content:
U.K.-based robotics firm Humanoid says it is now a $1 billion company. Complete the form to unlock this article and enjoy unlimited free access to all PYMNTS content — no additional logins required. yesSubscribe to our daily newsletter, PYMNTS Today. By completing this form, you agree to receive marketing communications from PYMNTS and to the sharing of your information with our sponsor, if applicable, in accordance with our Privacy Policy and Terms and Conditions. Δ The startup achieved that status, becoming “Europe’s first pure-play humanoid robotics unicorn,” after raising $152 million in a Series A round announced Tuesday (July 21). “Now is a defining moment for the European technology ecosystem which positions the region among the global leaders in one of the world’s fastest-growing tech sectors,” Humanoid said in a news release. “Until now, much of the physical AI momentum has been concentrated in the United States and China. The investment demonstrates that the U.K. and continental Europe can produce and scale globally competitive humanoid robotics companies at the cutting-edge of the field.” The company said the new capital will help it develop and launch its humanoid robotics platform, and help fund long-term commercial deployments with customers in sectors such as logistics, manufacturing and retail. In addition, the funds will help it begin mass manufacturing of wheel-based humanoid robots and to develop its proprietary AI brain KinetIQ. According to the release, Humanoid has secured partnerships with companies such as SAP, Nvidia, Bosch, and Siemens and recently inked “the industry’s largest publicly announced commercial agreement” with Schaeffler to deploy thousands of humanoid robots for the manufacturing space. “Humanoid robotics will be one of the defining technologies of the next decade, reshaping how commercial and industrial work gets done,” said Zia Huque, general partner at Prime Movers Lab, which led the round. “We expect the field to consolidate around a handful of category leaders across the US, Europe, and China. Humanoid AI will be one of a small cadre of robotics companies that will define humanoid robotics in Europe and beyond.” In other robotics news, PYMNTS wrote recently about the rise of “cobots”—collaborative robots—which are designed to help workers with repetitive, physically demanding or precision-oriented tasks while letting their human counterparts tackle judgment-intensive activities. While this dramatically expands automation’s potential, the report said, it also poses risk-related questions: Can autonomous systems function near human workers safely? Can these machines reliably interpret their environment? Can manufacturers ensure that intelligent systems will operate predictably under real-world conditions? “Those questions may determine the pace of industrial automation more than advances in robotics hardware itself,” the report said. “In a traditional industrial setting, safety is achieved through distance. In a collaborative environment, safety must be engineered into every interaction. Robots must recognize people, anticipate movement, understand context and react appropriately to unexpected situations.” Humanoid Raises $152 Million to Expand Robotics Company Synchrony CFO Sees Consumers Spending Through Inflation Pressure Physical AI’s Biggest Challenge Is the Last 50 Feet Early AI Gains Prompt Equifax to Double Savings Forecast to $150 Million Get PYMNTS Today, AI, B2B and more. Own the conversation. Drive demand.
Description: Hello Kitty Romi AI Robot - Japan's most famous cat (or perhaps second most famous after the beckoning cat, maneki-neko), Hello Kitty, is 50 year old and Sanrio is celebrating with all kinds of special collaborations and one-of-a-kind items. Few, though, can be more Japanese than this tie-up with IT company Mixi, which is adap ...
Description: The newest model, which has been made after decades of development, has been designed for commercial use and is intended to address "real-world applications," a...
Content:
Elite Robots Collaborates with Generalist AI on Next-Gen Embodied AI …
Description: Money Compass is one of the credible Chinese and English financial media in Malaysia with strong influence in Malaysia’s financial industry. As the winner of the SME Award in Malaysia for 5 consecutive years, we persistently propel the financial industry towards a mutually beneficial framework. Since 2004, with the dedication to advocating the public to practice financial planning in everyday life, Money Compass has accumulated a vast connection in ASEAN financial industries and garnered government agencies and corporate resources. At present, Money Compass is adjusting its pace to transform into Money Compass 2.0. Consolidating the existing connections and network, Money Compass Integrated Media Platform is founded, which is well grounded in Malaysia whilst serving the ASEAN region. The mission of the new Money Compass Integrated Media Platform is to become the financial freedom gateway to assist internet users enhance financial intelligence, create wealth opportunities and achieve financial freedom for everyone!
Description: MIT's DAAAM framework gives robots long-term spatial memory by attaching language descriptions to 3D maps. Ask "where's my wallet?" and it searches its memory.
Description: Orchestra Portable AI Hub Utilizes NVIDIA Jetson™ Platform for Real-Time Visual Perception, Gesture Recognition and Multi-Device Coordination
Content:
Orchestra Portable AI Hub Utilizes NVIDIA Jetson™ Platform for Real-Time Visual Perception, Gesture Recognition and Multi-Device Coordination AUSTIN, Texas, July 24, 2026 (GLOBE NEWSWIRE) -- Wetour Robotics Limited (NASDAQ: WETO) ("Wetour Robotics" or the "Company"), a Physical AI infrastructure and wearable robotics company, today outlined Orchestra, its portable AI hub and operating system for wearable robotics. Orchestra is designed to enable real-time visual perception, gesture recognition and multi-device coordination by centralizing AI processing in a dedicated edge computing unit powered by NVIDIA Jetson. Developing Physical AI with NVIDIA Technologies Orchestra is designed to serve as the central intelligence and coordination layer for Physical AI and wearable robotics devices. By externalizing computing power from individual wearable endpoints into a dedicated portable hub, Orchestra enables devices such as smart glasses, gesture-control wristbands and body-worn sensors to remain lightweight and energy-efficient while the hub handles intensive AI processing, multi-device coordination and real-time decision-making. The Orchestra hub utilizes the NVIDIA Jetson platform for on-device inference, supporting two core technology modules: Vision-Link -- a visual perception and command pipeline that processes real-time visual input, performs scene understanding using NVIDIA-accelerated inference and translates visual context into actionable commands for connected physical devices. Conductor -- a neural gesture recognition and command translation system. Conductor reads electromyographic (EMG) signals from the wearer's wrist, uses proprietary algorithms running on NVIDIA Jetson to recognize continuous hand gestures in real time, and converts recognized gestures into precise control commands for connected devices such as exoskeletons, smart furniture and robotic arms. "NVIDIA Jetson is the computing foundation that makes Orchestra's real-time coordination possible," said Nan Zheng, Chief Executive Officer of Wetour Robotics. "Vision-Link turns what you see into machine action. Conductor turns how you move into machine commands. Both require low-latency, on-device AI processing enabled by NVIDIA edge computing. This is edge AI applied to the human body." Open Architecture Approach Orchestra is being developed with an open architecture approach. The Company intends to explore open interface protocols that would allow third-party hardware manufacturers, including makers of exoskeletons, smart furniture and robotic devices, to build on the Orchestra platform, while Wetour Robotics retains proprietary capabilities in its core intelligence engine, including Vision-Link and Conductor. "The real bottleneck in Physical AI is not building better robots -- it is imagining better use cases," Zheng added. "Orchestra, powered by NVIDIA edge AI computing, gives builders tools to create Physical AI applications at the performance level these use cases demand." About Wetour Robotics Limited Wetour Robotics Limited (NASDAQ: WETO), formerly known as Webus International Limited, is a Physical AI infrastructure and wearable robotics company developing Orchestra, a portable AI hub and operating system designed to coordinate human intent with intelligent physical devices. Orchestra's core technology modules include Vision-Link, a visual perception and command pipeline, and Conductor, a neural gesture recognition and command translation system. Wetour Robotics is headquartered in Austin, Texas. For more information, visit www.wetourrobotics.com. Forward-Looking Statements This press release contains forward-looking statements within the meaning of the safe harbor provisions of the U.S. Private Securities Litigation Reform Act of 1995, including statements regarding the development, capabilities, architecture, performance, interoperability and commercialization of Orchestra, Vision-Link and Conductor; the use and availability of NVIDIA technologies; and potential third-party adoption. Words such as "designed to," "intends," "expects," "plans," "may," and similar expressions identify forward-looking statements. These statements are based on the Company's current expectations and involve risks and uncertainties, including development delays, technical performance, availability and performance of third-party technologies, interoperability, commercialization, customer adoption, competition, capital resources and other risks described in the Company's filings with the U.S. Securities and Exchange Commission. Actual results may differ materially from those expressed or implied. The Company undertakes no obligation to update forward-looking statements except as required by law. Investor Relations Contact Annabelle Li Investor Relations - Wetour Robotics Limited [email protected]
Images (10):
TUM - Studentische Hilfskraft - Tutor Human-Robot Interaction Seminar
Description: We are seeking a tutor (m/f/x) for our interdisciplinary seminar “Human-Robot Interaction” for the Winter Term 2026/27.
Content:
22.07.2026, Studentische Hilfskräfte, Praktikantenstellen, Studienarbeiten We are seeking a tutor (m/f/x) for our interdisciplinary seminar “Human-Robot Interaction” for the Winter Term 2026/27. Description: We are seeking a tutor (m/f/x) for our interdisciplinary seminar “Human-Robot Interaction” for the Winter Term 2026/27. In this seminar, students explore various application areas of human-robot interaction (HRI). Working in teams, they prepare and lead seminar sessions on specific topics, such as “HRI in Healthcare”. Each session involves a presentation by the student group, followed by a guided discussion. Some sessions may also include a hands-on workshop involving a robotic system. Given the tight timeline of the academic semester, your job would be to support student teams by offering help in setting up and using robotic systems and assisting with organizational matters. Prerequisites: - Motivated to assist students in overcoming technical setup challenges. - Experience with programming languages such as Python and robotics software environments such as ROS is a plus. - Experience with platforms used in hobbyist robotics is a plus. Kontakt: jakob.reinhardt@tum.de Aktuelles Dr. Karl Wamsler Innovation Award für Frances H. Arnold und Tao Zhang TUM baut strategische Partnerschaft mit dem MIT aus Materialien für Fusionskraftwerke testen MCube MOSAIQ startet Umgestaltungen in den Quartieren Schwabing-West und Moosach TUM Campus Heilbronn stärkt seine Kompetenzen im Chipdesign Gemeinsam für Olympia no events today.
Images (10):
Desarrollan una nueva generación de robots capaces de aprender cuándo …
Description: Investigadores del Instituto de Investigación en Ingeniería Mecatrónica y Sistemas Ciberfísicos de la Universidad de Málaga (IMECH.UMA) han desarrollado un nuevo enfoque de inteligencia artificial que permite a los robots aprender no solo qué decisión tomar, sino también cuándo tomarla, incorporando el tiempo como un factor esencial en su proceso de aprendizaje.
Content:
Síguenos VOLVER Investigadores del Instituto de Investigación en Ingeniería Mecatrónica y Sistemas Ciberfísicos de la Universidad de Málaga (IMECH.UMA) han desarrollado un nuevo enfoque de inteligencia artificial que permite a los robots aprender no solo qué decisión tomar, sino también cuándo tomarla, incorporando el tiempo como un factor esencial en su proceso de aprendizaje. Fuente: Universidad de Málaga inteligencia artificial Investigadores del Instituto de Investigación en Ingeniería Mecatrónica y Sistemas Ciberfísicos de la Universidad de Málaga (IMECH.UMA) han desarrollado un nuevo enfoque de inteligencia artificial que permite a los robots aprender no solo qué decisión tomar, sino también cuándo tomarla, incorporando el tiempo como un factor esencial en su proceso de aprendizaje. El trabajo se desarrolla en el marco del proyecto TYRELL (Time in Reinforcement Learning for Robotics), financiado por el Ministerio de Ciencia, Innovación y Universidades, y aborda un aspecto habitualmente ignorado en el aprendizaje por refuerzo (Reinforcement Learning), una de las técnicas de inteligencia artificial más empleadas para dotar de autonomía a los robots. En la mayoría de los sistemas actuales, los robots toman decisiones a intervalos de tiempo fijos. Sin embargo, el equipo del IMECH.UMA propone que esos intervalos se adapten dinámicamente a cada situación. «Al igual que una persona no necesita reaccionar con la misma frecuencia cuando conduce por una autopista que cuando maniobra para aparcar, un robot tampoco debería tomar decisiones siempre al mismo ritmo», explica el investigador principal del proyecto, Juan Antonio Fernández Madrigal. En este sentido, explica que en la mayoría de los algoritmos de navegación existentes, los robots toman decisiones a intervalos de tiempo fijos definidos previamente por el diseñador del sistema. Sin embargo, tal y como explicaba Fernández Madrigal anteriormente, no todas las situaciones requieren el mismo nivel de atención. Por tanto, los investigadores sostienen que “en zonas con obstáculos o gran incertidumbre conviene reaccionar rápidamente, mientras que en otras el robot puede mantener una misma acción durante más tiempo, reduciendo el consumo energético y el esfuerzo computacional”. “Nuestro robot aprende automáticamente cuándo necesita prestar mucha atención al entorno y cuándo puede mantener una acción durante más tiempo porque el riesgo es menor. Estos mapas reflejan esa intensidad temporal de la atención y permiten aprovechar mucho mejor el tiempo de cómputo, algo especialmente importante en robots de pequeño tamaño”, señala Adrián Bañuls Arias, primer autor del artículo e investigador predoctoral del proyecto. Los investigadores han desarrollado los denominados ‘Mapas de Tiempo Subjetivo’ (Subjective Time Maps), una nueva representación del entorno que permite al robot aprender qué frecuencia de decisión resulta más adecuada en cada zona. De este modo, pueden reaccionar con rapidez en situaciones complejas y espaciar sus decisiones cuando el entorno es más favorable, mejorando simultáneamente la seguridad, la precisión de la navegación y la eficiencia energética y computacional. El equipo, al completo. De izquierda a derecha, Vicente Arévalo, Juan Manuel Gandarias, Ana Cruz, Manuel Castellano y Juan Antonio Fernández Madrigal. Abajo, Adrián Bañuls y Cipriano Galindo. Además de su interés científico, el proyecto apuesta por la ciencia abierta mediante la publicación de bibliotecas de software, simuladores y conjuntos de datos experimentales que facilitan la reproducción y validación de los resultados por otros grupos de investigación. Los resultados más recientes de esta investigación han sido publicados en la revista internacional ‘Computer Modeling in Engineering & Sciences’, donde el equipo demuestra que este nuevo enfoque permite optimizar la navegación autónoma incluso cuando existen incertidumbres en la localización del robot o retrasos en las comunicaciones. El proyecto TYRELL reúne a investigadores de la Universidad de Málaga, la Örebro University (Suecia) y la École Polytechnique Fédérale de Lausanne (EPFL) (Suiza), y estudia cómo la dimensión temporal puede mejorar el aprendizaje tanto en robots móviles como en manipuladores robóticos, con aplicaciones potenciales en logística, agricultura, inspección industrial, robótica de servicios o misiones de búsqueda y rescate. Esta investigación, liderada por la Estación Biológica de Doñana y realizada con mosquitos silvestres del sur de España, aporta nuevas claves sobre los factores que pueden influir en la capacidad de estos insectos para transmitir patógenos. Un nuevo estudio de la Universidad de Granada analiza las consecuencias a largo plazo de la restricción del crecimiento extrauterino (EUGR), que afecta al 37% de los prematuros. Los investigadores han detectado posibles alteraciones estructurales cerebrales persistentes. Un estudio dirigido por la Universidad Pablo de Olavide ha permitido contrastar sobre el terreno varias hipótesis planteadas mediante georradar y documentación digital, además de aportar nuevos datos sobre los jardines y una gran piscina circular. #CienciaDirecta Tu fuente de noticias sobre ciencia andaluza Más información Suscríbete Suscríbete a nuestro boletín Una web de: Con la colaboración de la Fundación Española para la Ciencia y la Tecnología — Ministerio de Ciencia, Innovación y Universidades Alojado en: Herramientas de accesibilidad