AUTOMATION HISTORY
1371
Total Articles Scraped
3596
Total Images Extracted
Scraped Articles
New Automation| Action | Title | URL | Images | Scraped At | Status |
|---|---|---|---|---|---|
| SoftBank is reportedly weighing a deal for Swiss robotics startup … | https://thenextweb.com/news/softbank-gr… | 10 | Aug 03, 2026 16:00 | active | |
SoftBank is reportedly weighing a deal for Swiss robotics startup GravisURL: https://thenextweb.com/news/softbank-gravis-robotics-deal Description: SoftBank is said to be weighing a deal with Gravis Robotics, the ETH Zurich spinout making excavators drive themselves. Terms are undisclosed. Content:
Gravis Robotics, an ETH Zurich spinout, fits autonomy kits to excavators. A tie-up would extend Masayoshi Son’s robotics buying spree from the factory floor to the building site. SoftBank is weighing a deal for Gravis Robotics, a Swiss startup that fits excavators and diggers with the sensors and software to run themselves, according to Bloomberg. The report did not spell out the shape of any transaction, and the size, structure, and valuation were not disclosed. The discussions appear to be at an early stage, and there is no guarantee they lead anywhere. What they do signal is where SoftBank is looking next. Masayoshi Son’s group has spent the past year assembling a robotics portfolio at speed, from an $800mn round it is reportedly circling for Agile Robots to smaller bets on the kind of autonomy kits that bolt onto existing machinery. The 💜 of EU tech The latest rumblings from the EU tech scene, a story from our wise ol' founder Boris, and some questionable AI art. It's free, every week, in your inbox. Sign up now! Gravis Robotics spun out of ETH Zurich in 2022, from the Swiss university’s Robotic Systems Lab. Rather than build a robot from scratch, it retrofits standard heavy equipment, attaching a kit that fuses LiDAR, cameras, GNSS positioning, and hydraulic sensors so an ordinary excavator can trench, grade soil, and manage stockpiles on its own. The company says the approach can lift site output by roughly 30%. The kit has a name, or two. The hardware, Gravis calls Rack; the operator controls it through a tablet interface named Slate that switches between autonomous and manual modes. The pitch is that a machine can be taught to feel the soil through its hydraulics rather than follow a fixed programme. It is run by chief executive Ryan Luke Johns, an architect turned roboticist, alongside chief technology officer Dominic Jud and co-founder Marco Hutter, an ETH robotics professor. Johns and Jud hold a Guinness World Record together for the largest robot-built dry-stone wall, which tells you something about the company’s temperament. In November 2025 the startup raised $23mn in a round co-led by IQ Capital and Zacua Ventures, with Pear VC, Sunna Ventures, and cement group Holcim among the backers. By its own account, Gravis now has machines working on active sites across seven countries. Its customer list, per the company’s own announcements, includes contractor Taylor Woodrow, which used the technology at Manchester Airport, plant-hire firm Flannery, and Holcim, which runs it in quarries. Those claims come from Gravis and have not been independently audited. For SoftBank, construction is a logical extension of a much larger thesis. The group agreed last October to buy ABB’s robotics division for $5.4bn, and a four-bank syndicate only finished putting together the roughly $1.75bn loan behind that purchase this week. It is also selling its remaining stake in Boston Dynamics to Hyundai, tidying up an older robotics bet even as it places newer ones. The Gravis talks, if real, would join a run of similar moves. SoftBank led Agile Robots’ 2021 financing, the round that made the Munich firm Germany’s first robotics unicorn, and is now said to be anchoring a fresh $800mn raise there. Earlier in 2025 it put $500mn into Skild AI, a startup building a general-purpose model to control robots. The common thread is machines that do physical work, and software good enough to run them. Son’s pitch is that artificial intelligence has matured in software and the next frontier is giving it a body. SoftBank is reportedly preparing a US-based AI and robotics vehicle, provisionally called Roze, that it hopes to float at a $100bn valuation. The wider market has moved with him, with global robotics investment more than doubling to $27.6bn in 2025, the year of record rounds for firms such as NEURA Robotics. A digger that drives itself is a less photogenic proposition than a walking humanoid, but it may be a more immediately useful one. Construction faces a persistent shortage of skilled machine operators, and earthmoving is repetitive, dangerous, and expensive to staff. Whether SoftBank ends up buying into Gravis, or simply kicking the tyres, the direction of travel is clear enough. The company that once bet on a chatty humanoid named Pepper now wants the machines that move actual earth. I am the Editor in Chief for TNW, covering technology not as a parade of launches and valuations, but as a system of influence, persuasion, (show all) I am the Editor in Chief for TNW, covering technology not as a parade of launches and valuations, but as a system of influence, persuasion, and change. I write about startups, venture capital, digital policy, and Europe ecosystem, with an eye on the larger story beneath them: who gets to build the future, who profits from it, and how Europe is learning to speak in a louder voice of its own. Before moving into senior editorial leadership, I've built my career for over +10 years across journalism, storytelling, content strategy, SEO, and digital publishing, with experience in SaaS, hospitality, art, and culture. Get the most important tech news in your inbox each week. The heart of tech A Tekpon Company Copyright © 2006—2026, Cogneve, INC. Made with <3 in Amsterdam.
Images (10): 


|
|||||
| SoftBank Robotics launches Begin+ JIG for PUDU T300 | IBTimes … | https://jp.ibtimes.com/softbank-robotic… | 10 | Aug 03, 2026 16:00 | active | |
SoftBank Robotics launches Begin+ JIG for PUDU T300 | IBTimes JPURL: https://jp.ibtimes.com/softbank-robotics-launches-begin-jig-pudu-t300-103278 Description: New attachment, developed with Monolix, lets PUDU T300 tow existing cage carts without modification and automate post-unloading transport. Content:
SoftBank Robotics said on July 31 it began selling a towing attachment for cage carts used with its PUDU T300 transport robot, targeting logistics and manufacturing sites seeking to automate material handling amid labor shortages in Japan. The product, called "Begin+ JIG for T300," was jointly developed with Monolix and is being offered as a new option for the PUDU T300. The attachment allows users to connect existing cage carts to the robot with a one-touch mechanism and automate transport without special modifications to the carts. The companies developed the product after receiving requests from multiple customers to move goods in cage carts directly after truck unloading without transferring them to a different trolley, according to the release. SoftBank Robotics said the setup is designed to eliminate that reloading step while reducing the burden on workers handling transport tasks. The attachment can be used with standard cage carts and also supports models fitted with four swivel casters. At delivery points, the system can automatically detach the cage cart even if no worker is present, and the PUDU T300 can then return automatically to its designated home position. The company plans to expand compatibility in the future to towing carts other than cage carts. Japan's logistics and factory operators have increasingly adopted transport automation as labor shortages deepen and demand grows for equipment that can reduce manual handling. Cage carts, known in Japan as wheeled metal-frame carts used widely in warehouses, factories and retail backrooms, are a standard tool for moving goods in bulk. © Copyright 2026 IBTimes JP. All rights reserved.
Images (10): 


|
|||||
| Chinese firm plans life-like male and female humanoid robot companions | https://interestingengineering.com/ai-r… | 10 | Aug 03, 2026 08:00 | active | |
Chinese firm plans life-like male and female humanoid robot companionsURL: https://interestingengineering.com/ai-robotics/china-ubtech-humanoid-robot-companions Description: UBTECH launches UWORLD and U1 humanoid robots, bringing factory-proven robotics technology into homes for everyday use. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Male and female U1 humanoids feature lifelike silicone skin, realistic hair, and 88 DoF for natural movement. Chinese robotics company UBTECH has launched UWORLD, a new consumer-focused brand, along with its U1 series of humanoid robots. The move marks the company’s expansion from industrial automation into the home robotics market. UBTECH spent years developing full-size humanoids for factories and warehouses, where manufacturers including NIO and FAW-Volkswagen have used its robots. The U1 series brings technologies developed for safe human interaction, precision work, and autonomous operation in complex industrial environments into everyday household settings. In March 2025, UBTECH and Siemens partnered to accelerate humanoid robot production, targeting an annual manufacturing capacity of 10,000 units by 2026. The Shenzhen-based robotics firm recently unveiled the U1 series under its newly created consumer brand, UWORLD. The new series represents a dramatic departure from UBTECH’s traditional focus on industrial humanoid robots deployed in factories and warehouses. Although the lifelike androids are expected to cost around $30,000, interest has been high. Pre-orders opened on JD.com on June 2, requiring a 3,000 yuan (about $450) deposit, and the company reported more than 2,100 reservations within the first week. Early customers are expected to receive deliveries beginning in mid-September, while a full public launch event is scheduled for June 30, reports Gazgoo. Over the past several years, the company has supplied advanced humanoid systems for major manufacturers, including Airbus, Texas Instruments, NIO, ZEEKR, Dongfeng Liuzhou Motor, and FAW-Volkswagen. The technologies developed for those demanding industrial environments now form the foundation of the company’s first consumer-oriented humanoids. UBTECH is offering both male and female versions of the U1. The male model stands 183 centimeters (6 feet) tall, while the female version measures 168 centimeters (5 feet 6 inches). Both feature lifelike silicone skin, realistic hair, expressive facial features, and an impressive 88 degrees of freedom throughout the body. This allows coordinated movement of the arms, legs, hands, neck, chest, and torso, creating highly natural-looking motions, reports Techeblog. Promotional videos released by the company showcase the robots in cinematic settings, highlighting their realistic appearance. Close-up shots reveal detailed skin textures, natural-looking hair, subtle facial expressions, and reflective eyes designed to enhance their humanlike presence. UBTECH claims to experience strong early demand for its new line of ultra-realistic humanoid companions, marking a major expansion beyond the industrial robotics market that helped establish the company’s reputation. Rather than focusing on physical labor, the U1 series is designed primarily for social interaction and emotional companionship. The robots use onboard artificial intelligence to maintain conversations, recognize moods, and adapt their responses to users. According to UBTECH, the system can analyze facial expressions, tone of voice, and speaking patterns to estimate emotional states and adjust conversations accordingly. When users appear stressed or unhappy, the robot can offer supportive dialogue or attempt to guide interactions in a more positive direction. The company also emphasizes privacy. Personal memories and conversation data are stored locally with encryption, and owners can customize both the appearance and personality traits of their robot over time. However, UBTECH has deliberately limited the platform’s capabilities. The robots can sit, stand, walk on flat indoor surfaces, and engage in conversation. Still, they are not intended to perform household chores or navigate challenging environments such as stairs or uneven terrain. Users also cannot freely program new behaviors or functions. UBTECH’s move into consumer robotics is backed by growing momentum in its humanoid robot business. The company reported that revenue from its full-size embodied intelligent humanoid robot products and solutions reached 821 million yuan in 2025, more than 22 times higher than the previous year. The segment accounted for 41.1 percent of total company revenue, up from just 2.7 percent a year earlier, while cumulative deliveries reached 1,079 units, reports Gazgoo. According to reports, by leveraging technologies originally developed for industrial automation, UBTECH is betting that realistic humanoid companions could become the next major category in consumer robotics. Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Images (10): |
|||||
| 'Workhorse' humanoid robots from Ningbo head to global markets | http://www.ecns.cn/cns-wire/2026-07-30/… | 10 | Aug 02, 2026 16:00 | active | |
'Workhorse' humanoid robots from Ningbo head to global marketsURL: http://www.ecns.cn/cns-wire/2026-07-30/detail-ihfhvays7503860.shtml Content:
(ECNS) -- A humanoid robot innovation center in Ningbo, east China's Zhejiang Province, is developing practical robots for industrial and commercial applications, with one model already deployed at a European home appliance manufacturer's plant. Established in December 2023, the Zhejiang Humanoid Robot Innovation Center is supported by the Ningbo municipal government and a team led by Professor Xiong Rong of Zhejiang University. The center focuses on developing embodied intelligence technologies and humanoid robots for industrial use. "Our goal is not to create showpiece robots that perform flashy tricks," said Xiong, the center's chief scientist. "We want to build robots that can carry out real work, particularly precision tasks that are difficult to automate, labor-intensive or potentially dangerous." The center has developed the NAVIAI product range. In retail environments, NAVIAI robots can serve as "smart store managers," retrieving products from shelves. In chemical laboratories, they can complete entire workflows, including sampling, pretreatment, analysis and cleaning. One model, the NAVIAI-I2 bipedal humanoid robot, has achieved positioning accuracy of 0.03 millimeters. It has been deployed at the Turkish production facility of European home appliance brand Beko, making it one of the first Chinese-made humanoid robots to enter overseas markets. "We built a simulated production line at the center, completed all the necessary testing and then shipped the robots to Turkey for deployment. The overall cooperation has progressed smoothly," said Xu Xuecheng, vice general manager and chief technology officer of the center. "Feedback from the production site is also helping us further refine our products." With demand for automation growing across labor-intensive industries in Southeast Asia, the center is confident about expanding its presence in overseas markets, Xu added. The center has formed an industry alliance comprising 88 suppliers in Ningbo and more than 200 nationwide. Alongside the center's development, Ningbo has accelerated its expansion into the embodied intelligence sector, aiming to establish an ecosystem integrating AI models, hardware manufacturing and a wide range of practical applications. (By Tang Yuxian) China In Photos: Xinjiang deploys 108-arm robot for cotton topping Hefei builds 'custom factory' for robot components Beijing's service robot output surges 230% in H1
Images (10): 




|
|||||
| When a district in Florida's Everglades used robot rabbits to … | https://timesofindia.indiatimes.com/tec… | 10 | Aug 02, 2026 08:00 | active | |
When a district in Florida's Everglades used robot rabbits to eliminate its ever-growing population of Burmese pythons - The Times of IndiaDescription: Tech News News: Florida held its annual Python Challenge just a few weeks ago. The 10-day competition brings together professional and amateur hunters to track and re. Content:
The TOI Tech Desk is a dedicated team of journalists committed to delivering the latest and most relevant news from the world of technology to readers of The Times of India. TOI Tech Deskâs news coverage spans a wide spectrum across gadget launches, gadget reviews, trends, in-depth analysis, exclusive reports and breaking stories that impact technology and the digital universe. Be it how-tos or the latest happenings in AI, cybersecurity, personal gadgets, platforms like WhatsApp, Instagram, Facebook and more; TOI Tech Desk brings the news with accuracy and authenticity.Read More â¹8,999 â¹9,999 â¹14,999 â¹15,276 â¹13,999 â¹16,499 â¹16,979 â¹15,844 â¹10,298 â¹28,999 â¹13,499 â¹12,999 â¹15,490 â¹15,999 â¹9,999 â¹7,999 â¹10,358 â¹11,699 â¹12,499 â¹17,999 â¹14,499 â¹17,500 â¹17,835 â¹16,863
Images (10): 



|
|||||
| China's new humanoid robot offers 98% success rate, handles EV … | https://interestingengineering.com/ai-r… | 10 | Aug 01, 2026 08:00 | active | |
China's new humanoid robot offers 98% success rate, handles EV assemblyURL: https://interestingengineering.com/ai-robotics/china-humanoid-robot-success-ev-assembly Description: Xiaomi's humanoid robot reaches 98 percent assembly success, adds new factory tasks, and moves closer to human-level performance. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. The robots also added two new factory tasks, achieving a 90 percent success rate in both sorting and recycling operations. Xiaomi has reported new progress in deploying its humanoid robot on an automotive production line, with the machine achieving near-human performance after four months of improvements. The robot’s success rate at a self-tapping nut loading station has reached 98 percent, reducing the gap with human workers’ qualification rate to just one percentage point. The company also introduced two new manufacturing tasks—center console side panel sorting and parts bin folding and recycling—both reaching 90 percent success, including the robot’s first long-duration handling of flexible workpieces in a car factory. In March 2026, Xiaomi announced that it had deployed humanoid robots in electric vehicle (EV) assembly operations in China, with it recording a success rate of 90.2 percent. Xiaomi has announced significant progress in deploying its humanoid robot on an automotive production line, reporting improved performance across multiple manufacturing tasks after four months of continuous development and optimization. According to the company, the robot’s success rate at a self-tapping nut loading station has increased from 90.2 percent to 98 percent, bringing its qualification rate to within just one percentage point of that achieved by human workers. The improvement reflects ongoing refinements to the robot’s perception, manipulation, and task execution capabilities in a real factory environment, reports Technode. Xiaomi has also expanded the robot’s responsibilities by introducing two additional production tasks: center console side panel sorting and parts bin folding and recycling. Both tasks have reached a success rate of 90 percent, demonstrating the robot’s ability to perform a wider range of assembly and logistics operations on the factory floor. The center console side panel sorting application represents a notable milestone, as Xiaomi says it is the first time a humanoid robot has carried out long-duration continuous operations involving flexible workpieces in an automotive factory. Handling flexible components is generally more challenging than rigid parts because they can deform, shift position, and require more precise perception and manipulation. In recent times, rival robotics firms like Figure and AgiBot have both used extended livestreams to demonstrate the real-world capabilities and reliability of their humanoid robots, shifting the focus from short promotional videos to continuous, unedited factory operations. Figure streamed its Figure 02 humanoid performing logistics and warehouse-style tasks for more than 20 hours continuously. During the demonstration, the robot autonomously handled repetitive pick-and-place operations, transporting items between workstations while adapting to changing object positions. The livestream highlighted the robot’s ability to operate for long periods with minimal human intervention, although Figure did not disclose a formal task success rate. Instead, the company emphasized consistent autonomous performance, fleet management, and long-duration reliability as key milestones toward commercial deployment. AgiBot has conducted several large-scale factory livestreams showcasing its humanoid robots in real manufacturing environments. In one widely reported demonstration, the company’s G2 humanoid operated for 64 consecutive hours on a tablet production line, completing 64,828 manufacturing tasks and contributing to the production of 17,625 tablets. AgiBot reported an overall 99.99 percent task success rate, making it one of the most detailed public demonstrations of humanoid robot reliability in industrial production. More recently, AgiBot showcased further progress with humanoid robots performing automotive assembly tasks. After four months of optimization, the robots achieved a 98 percent success rate in self-tapping nut loading and 90 percent success rate in center console side panel sorting and parts bin folding and recycling, highlighting continued improvements in manufacturing performance. Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Images (10): |
|||||
| Brain-Inspired AI Uses Cognitive Maps | https://neurosciencenews.com/brain-insp… | 0 | Jul 30, 2026 16:00 | active | |
Brain-Inspired AI Uses Cognitive MapsURL: https://neurosciencenews.com/brain-inspired-ai-cognitive-maps-31145/ Description: Brain inspired AI model employs cognitive maps and stochastic calculations for energy efficient problem solving. Content: |
|||||
| Samsung Electronics launches robotics division to drive humanoid robot push … | https://www.thehindubusinessline.com/in… | 10 | Jul 30, 2026 00:01 | active | |
Samsung Electronics launches robotics division to drive humanoid robot push - The HinduBusinessLineDescription: The South Korean conglomerate said the RX, or "Robotics eXperience", division will oversee its mid-to-long-term robotics strategy, core technology development and business execution Content:
-331.62 -102.15 -407.00 + 283.00 + 2,859.00 -331.62 -102.15 -102.15 -407.00 -407.00 + 283.00 Samsung Electronics said on Tuesday it will set up a robotics division reporting directly to the chief executive to accelerate development and commercialisation in the field and establish robotics as a growth engine. The South Korean conglomerate said the RX, or "Robotics eXperience", division will oversee its mid-to-long-term robotics strategy, core technology development and business execution, while expanding research capabilities at home and overseas. Executive Vice President Lee Dongkun will head the Robotics Strategy Team, Samsung said in a statement. Lee previously led robotics strategy at Hyundai Motor Group, including the direction of Boston Dynamics. Samsung also said it plans to establish robotics research hubs in the U.S., China and Japan, where robotics technology is advancing rapidly, to strengthen competitiveness by leveraging local ecosystems and expertise. The development builds on a broader robotics push. During its January earnings conference call, Samsung said it aimed to achieve "tangible" results in its humanoid robotics business this year. In April, Samsung said it would consider investment and acquisitions where necessary to accelerate development and commercialisation in robotics, while combining partnering local companies for technology development. Samsung also said advances in technology such as physical AI was making robotics businesses increasingly viable. It said it planned to develop humanoid robots to improve both productivity and user experience, initially for deployment at manufacturing sites before expanding into home and retail sectors. Published on July 21, 2026 Copyright© 2026, THG PUBLISHING PVT LTD. or its affiliated companies. All rights reserved. BACK TO TOP Comments have to be in English, and in full sentences. They cannot be abusive or personal. Please abide by our community guidelines for posting your comments. We have migrated to a new commenting platform. If you are already a registered user of TheHindu Businessline and logged in, you may continue to engage with our articles. If you do not have an account please register and login to post comments. Users can access their older comments by logging into their accounts on Vuukle. Terms & conditions | Institutional Subscriber
Images (10): 
|
|||||
| Humanoid Raises $152 Million at $1.35 Billion Post-Money Valuation, Becoming … | https://en.antaranews.com/news/423825/h… | 3 | Jul 30, 2026 00:01 | active | |
Humanoid Raises $152 Million at $1.35 Billion Post-Money Valuation, Becoming Europe's First Pure-Play Humanoid Robotics Unicorn - ANTARA NewsDescription: -Humanoid, a UK-based AI and robotics company building industrial humanoid robots, announced a $152 million Series A financing at a $1.35 billion post-money ... Content:
© 2020 Reporter: PR WireEditor: PR Wire Copyright © ANTARA 2026
Images (3): 

|
|||||
| Samsung to Enter Humanoid Robots Market With New Robotics Division | https://propakistani.pk/2026/07/21/sams… | 10 | Jul 30, 2026 00:01 | active | |
Samsung to Enter Humanoid Robots Market With New Robotics DivisionDescription: Samsung Electronics has created a new robotics division as it tries to turn robots into a major future growth business. The new unit is called RX, short Content:
Samsung Electronics has created a new robotics division as it tries to turn robots into a major future growth business. The new unit is called RX, short for Robotics eXperience, and will report directly to Samsung co-CEO Roh Tae-moon, who also leads the company’s Device eXperience division. Samsung said the division will focus on robotics strategy, core technology development, and commercial execution. Samsung said the RX division will oversee its mid-to-long-term robotics strategy and help expand research capabilities in South Korea and overseas. The move brings together robotics teams and technologies that were previously spread across the company. Samsung wants one organization to lead product development, commercialization, and the wider robotics roadmap. The restructuring also shows Samsung’s growing interest in physical AI, where artificial intelligence is used to power machines that can operate in the real world. Samsung said advances in physical AI are making robotics businesses more commercially viable. Samsung plans to focus first on humanoid robots for manufacturing sites. The company then wants to expand the technology into home and retail use once it becomes more reliable. Samsung told analysts earlier this year that it wanted to achieve “tangible” results in humanoid robotics in 2026. Samsung also said it may pursue more investments and acquisitions to speed up robotics development and commercialization. Samsung has appointed Lee Dong-kun, an executive vice president, to lead the Robotics Strategy Team. Lee previously worked at Hyundai Motor Group, where he handled robotics strategy, including the direction of Boston Dynamics. Samsung is also adding academic experts in autonomous robot control and robotic hand technologies to the RX division. The new division builds on Samsung’s earlier investment in Rainbow Robotics, a South Korean robotics company. Samsung became Rainbow Robotics’ largest shareholder after taking a new 267 billion won stake in the company. Before that deal, Samsung already owned 14.71 percent of Rainbow Robotics. Since then, Samsung and Rainbow Robotics have worked on manufacturing robots, humanoid-related technologies, and physical AI systems. Samsung will base the RX division at its Seoul R&D Campus. The company also plans to build a robotics data factory at its Gumi site. That facility will collect and use real-world robotics data to improve robot AI and control systems. Samsung is also planning research hubs in the United States, China, and Japan to access local robotics talent and technology ecosystems. The timing matters because Samsung is looking for new growth areas beyond smartphones, appliances, and semiconductors. Robotics is becoming more competitive, with companies such as Tesla, Chinese robot makers, and US startups all racing to commercialize humanoid machines. Samsung has advantages in manufacturing, components, chips, sensors, displays, and supply chain scale, but turning those strengths into reliable robots will take time. For now, the clearest message is organizational. Samsung is no longer treating robotics as a side project. By creating a CEO-level RX division, the company has made robotics a formal test of its next growth strategy. Get the latest tech news, telecom insights, and product launches wherever you prefer. Add ProPakistani to Preferred Sources and see more of our stories in Google Search and Top Stories. Technology and Automotive Specialist covering the latest cars, smartphones, AI breakthroughs, and... Shares ProPakistani is the premier and most trustworthy resource for all happenings in technology, telecom, business, sports, auto, education, real estate and entertainment news in Pakistan. Whether it's the top trending news, inside scoops or features, interviews, market trends and analysis, product reviews, How to's or tutorials – we cover it all. © 2026 ProPakistani.PK - All rights reserved Join the groups below to get the latest news and updates. Session expired Please log in again. The login page will open in a new tab. After logging in you can close it and return to this page.
Images (10): 

|
|||||
| Humanoid Robotics Revolutionize Apparel Manufacturing | https://wwd.com/sourcing-journal/indust… | 10 | Jul 30, 2026 00:01 | active | |
Humanoid Robotics Revolutionize Apparel ManufacturingDescription: Jack Technology deploys humanoid robots to boost efficiency in apparel manufacturing using AI and Siemens' digital solutions. Content:
Here come the robots. While robotic arms have performed automotive welding for decades, sophisticated automation is now making a long-awaited leap into labor intensive sectors such as apparel, logistics and industrial security. Behind this shift is Jack Technology, which is a global manufacturer of industrial sewing machines that is leveraging AI and humanoid robotics to boost operational efficiency by at least 30 percent. To achieve this, the company has teamed up with Siemens for software solutions spanning design and simulation, and even platform development. Jack Technology also ordered 2,000 humanoid robots tailored specifically for apparel manufacturing this year. The companies said this marks a landmark moment as it represents the sector’s first large-scale deployment of humanoid technology designed to operate in human-centric workspaces. Related Stories Logistics Logistics Companies are Spending Big on Automation, But Slower and Smarter Than Before Industry News The Hidden Cash Trap Strangling International Brands The fleet of robots is using existing tools without costly facility modifications. Siemens said humanoid robots and quadrupeds are proving their worth across diverse, highly demanding operational environments. In a recent trial at Siemens’ electronics plant in Erlangen, a British start-up’s wheeled humanoid robot successfully handled warehouse crates using physical AI technology. The machine moved 60 crates per hour across eight-hour shifts. Tasks were completed autonomously. Meanwhile, robotics firm ANYbotics developed ANYmal, a four-legged robotic guard created to automate dangerous or difficult inspection tasks inside sprawling chemical and energy facilities. Navigating multistory halls, stairs and dark spaces, the quadruped uses infrared cameras and acoustic sensors to detect overheating equipment and subtle gas leaks. It relays critical real-time data back to human operators. Siemens said a robot must continuously exchange data with production systems, synchronize workflows alongside human colleagues and adapt dynamically to shifting factory conditions. Isolated hardware is simply insufficient. To bridge this gap, Siemens provides the foundational digital backbone, supplying everything from digital twins and AI-enabled sensing to drive systems and fleet management software. “The true value of a humanoid robot lies in its ability to become an integrated, collaborative tool within the manufacturing plant,” Siemens said in a corporate blog post. “This involves real-time data exchange with production systems and other autonomous guided vehicles (AGVs), the synchronization of workflows with other machines and human operators and adaptive operation that dynamically responds to changing conditions. Without deep integration, even the most sophisticated robot remains an isolated solution.” Receive Our Daily Newsletter & Special Offers Receive Our Daily Newsletter & Special Offers July 29, 2026 Fashion by Informa and the CFDA team up to advance local manufacturing and supply chain innovation. July 28, 2026 The Winston-Salem Open announced startup LET is its first ever official tennis string recycling partner. July 28, 2026 Puma created a new e-commerce and digital role, and Genesco's Schuh banner is changing leadership. WWD and Women's Wear Daily are part of Penske Media Corporation. © 2026 Fairchild Publishing, LLC. All Rights Reserved.
Images (10): 

|
|||||
| Samsung creates RX robotics division for humanoid robots | https://finance.yahoo.com/technology/ai… | 2 | Jul 30, 2026 00:01 | active | |
Samsung creates RX robotics division for humanoid robotsURL: https://finance.yahoo.com/technology/ai/articles/samsung-creates-rx-robotics-division-122248398.html Description: The new RX, or Robotics eXperience, unit will report directly to CEO TM Roh and establish research hubs in the U.S., China, and Japan Content:
Oops, something went wrong Samsung Electronics announced Tuesday the launch of a dedicated robotics division — called RX, short for Robotics eXperience — bringing together the company's work in the field as it searches for fresh engines of growth. CEO TM Roh will oversee the division directly, the company said. Executive Vice President Lee Dongkun, who previously led robotics strategy at Hyundai Motor Group — including oversight of Boston Dynamics — will head the Robotics Strategy Team, according to Reuters. According to the company, RX will be responsible for steering robotics strategy over the medium and long term, spanning everything from foundational technology work to bringing products to market. Samsung said it intends to open robotics research outposts in the U.S., China, and Japan, positioning itself to tap into the talent and industry networks those markets offer. Samsung stock rose 6.76% on the news, while the Kospi index was up about 4%. Samsung said humanoid robots are central to its plans, with the goal of boosting both output and end-user experience — beginning on factory floors and eventually reaching homes and retail settings. The company pointed to rapid progress in physical AI as a key factor improving the commercial prospects for robotics. The announcement follows a series of moves that signal a broader robotics push. Earlier this month, Roh said at a briefing in Jinju that Samsung plans to invest around 60 trillion won ($40.7 billion) in the Yeongnam region. Of that total, 19 trillion won is designated for Gumi — in partnership with Samsung SDS — to develop physical AI infrastructure and humanoid robot manufacturing facilities, the company said. Samsung also raised its stake in local firm Rainbow Robotics in late 2024 to become its largest shareholder. On its January earnings call, Samsung told investors it expected to have concrete progress to show in humanoid robotics before the year was out, according to Reuters. In April, Samsung indicated it was open to dealmaking — including potential acquisitions — to speed up its robotics push, alongside collaborations with domestic firms on underlying technology. Samsung has been navigating a period of significant capital commitments alongside strong financial performance. The company posted a preliminary second-quarter operating profit of 89.4 trillion won — roughly 19 times its year-earlier result — even as investors weighed the scale of its spending plans, including a separate 400 trillion won investment in a new semiconductor manufacturing hub in southwestern South Korea.
Images (2): |
|||||
| PYMNTS | Humanoid Raises $152 Million to Expand Robotics Company | https://www.pymnts.com/news/investment-… | 7 | Jul 30, 2026 00:01 | active | |
PYMNTS | Humanoid Raises $152 Million to Expand Robotics CompanyDescription: U.K.-based robotics firm Humanoid says it is now a $1 billion company after raising $152 million in a Series A round. Content:
U.K.-based robotics firm Humanoid says it is now a $1 billion company. Complete the form to unlock this article and enjoy unlimited free access to all PYMNTS content — no additional logins required. yesSubscribe to our daily newsletter, PYMNTS Today. By completing this form, you agree to receive marketing communications from PYMNTS and to the sharing of your information with our sponsor, if applicable, in accordance with our Privacy Policy and Terms and Conditions. Δ The startup achieved that status, becoming “Europe’s first pure-play humanoid robotics unicorn,” after raising $152 million in a Series A round announced Tuesday (July 21). “Now is a defining moment for the European technology ecosystem which positions the region among the global leaders in one of the world’s fastest-growing tech sectors,” Humanoid said in a news release. “Until now, much of the physical AI momentum has been concentrated in the United States and China. The investment demonstrates that the U.K. and continental Europe can produce and scale globally competitive humanoid robotics companies at the cutting-edge of the field.” The company said the new capital will help it develop and launch its humanoid robotics platform, and help fund long-term commercial deployments with customers in sectors such as logistics, manufacturing and retail. In addition, the funds will help it begin mass manufacturing of wheel-based humanoid robots and to develop its proprietary AI brain KinetIQ. According to the release, Humanoid has secured partnerships with companies such as SAP, Nvidia, Bosch, and Siemens and recently inked “the industry’s largest publicly announced commercial agreement” with Schaeffler to deploy thousands of humanoid robots for the manufacturing space. “Humanoid robotics will be one of the defining technologies of the next decade, reshaping how commercial and industrial work gets done,” said Zia Huque, general partner at Prime Movers Lab, which led the round. “We expect the field to consolidate around a handful of category leaders across the US, Europe, and China. Humanoid AI will be one of a small cadre of robotics companies that will define humanoid robotics in Europe and beyond.” In other robotics news, PYMNTS wrote recently about the rise of “cobots”—collaborative robots—which are designed to help workers with repetitive, physically demanding or precision-oriented tasks while letting their human counterparts tackle judgment-intensive activities. While this dramatically expands automation’s potential, the report said, it also poses risk-related questions: Can autonomous systems function near human workers safely? Can these machines reliably interpret their environment? Can manufacturers ensure that intelligent systems will operate predictably under real-world conditions? “Those questions may determine the pace of industrial automation more than advances in robotics hardware itself,” the report said. “In a traditional industrial setting, safety is achieved through distance. In a collaborative environment, safety must be engineered into every interaction. Robots must recognize people, anticipate movement, understand context and react appropriately to unexpected situations.” Humanoid Raises $152 Million to Expand Robotics Company Synchrony CFO Sees Consumers Spending Through Inflation Pressure Physical AI’s Biggest Challenge Is the Last 50 Feet Early AI Gains Prompt Equifax to Double Savings Forecast to $150 Million Get PYMNTS Today, AI, B2B and more. Own the conversation. Drive demand.
Images (7): 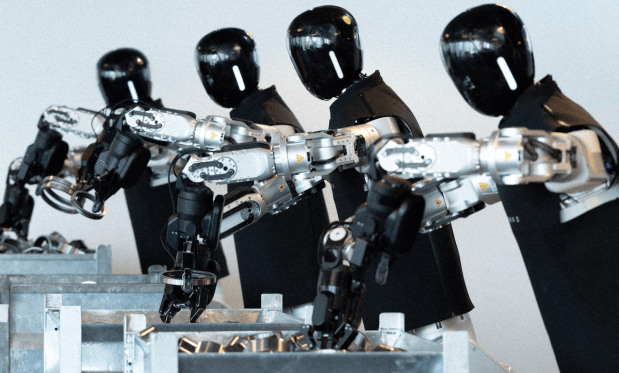

|
|||||
| Hello Kitty Romi AI Robot | Japan Trend Shop | https://www.japantrendshop.com/hello-ki… | 10 | Jul 29, 2026 08:00 | active | |
Hello Kitty Romi AI Robot | Japan Trend ShopURL: https://www.japantrendshop.com/hello-kitty-romi-ai-robot-p-8478.html Description: Hello Kitty Romi AI Robot - Japan's most famous cat (or perhaps second most famous after the beckoning cat, maneki-neko), Hello Kitty, is 50 year old and Sanrio is celebrating with all kinds of special collaborations and one-of-a-kind items. Few, though, can be more Japanese than this tie-up with IT company Mixi, which is adap ... Content:
Japan's most famous cat (or perhaps second most famous after the beckoning cat, maneki-neko), Hello Kitty, is 50 year old and Sanrio is celebrating with all kinds of special collaborations and one-of-a-kind items. Few, though, can be more Japanese than this tie-up with IT company Mixi, which is adapting its Romi talking robot with a Hello Kitty makeover. The result? The unique, limited-edition Hello Kitty Romi AI Robot! Using a real AI engine with proprietary deep learning software that has been educated through thousands of words and expressions, and boasting 100 facial expressions and movement patterns and over 100 everyday life functions (alarms, reminders schedulers, etc.), the Hello Kitty Romi AI Robot can really keep you company like a real person. And since this is a special Kitty-chan model, it plays Hello Kitty songs and even has her trademark bow where her ear would be. If you are learning Japanese, and want someone to help you with everyday conversation but aren't around Japanese people, this is the next best thing! Specs and Features: Copyright © 2026 Japan Trend Shop
Images (10): |
|||||
| Watch: Electric Humanoid Robot Unveiled By Boston Dynamics, Internet Calls … | https://www.ndtv.com/feature/watch-elec… | 0 | Jul 28, 2026 16:00 | active | |
Watch: Electric Humanoid Robot Unveiled By Boston Dynamics, Internet Calls It "Creepy"Description: The newest model, which has been made after decades of development, has been designed for commercial use and is intended to address "real-world applications," a... Content: |
|||||
| Elite Robots Collaborates with Generalist AI on Next-Gen Embodied AI … | https://moneycompass.com.my/elite-robot… | 9 | Jul 27, 2026 16:00 | active | |
Elite Robots Collaborates with Generalist AI on Next-Gen Embodied AI - Money CompassURL: https://moneycompass.com.my/elite-robots-collaborates-with-generalist-ai-on-next-gen-embodied-ai/ Description: Money Compass is one of the credible Chinese and English financial media in Malaysia with strong influence in Malaysia’s financial industry. As the winner of the SME Award in Malaysia for 5 consecutive years, we persistently propel the financial industry towards a mutually beneficial framework. Since 2004, with the dedication to advocating the public to practice financial planning in everyday life, Money Compass has accumulated a vast connection in ASEAN financial industries and garnered government agencies and corporate resources. At present, Money Compass is adjusting its pace to transform into Money Compass 2.0. Consolidating the existing connections and network, Money Compass Integrated Media Platform is founded, which is well grounded in Malaysia whilst serving the ASEAN region. The mission of the new Money Compass Integrated Media Platform is to become the financial freedom gateway to assist internet users enhance financial intelligence, create wealth opportunities and achieve financial freedom for everyone! Content:
SHANGHAI, July 21, 2026 /PRNewswire/ — US-based AI startup Generalist AI—founded by ex-Google DeepMind scientists and backed by NVIDIA NVentures—recently unveiled GEN-1, its latest embodied foundation model achieving a 99% task success rate and a 3x speed increase. As part of this breakthrough project, Elite Robots collaborated with Generalist AI to support real-world data collection and algorithm validation on its cobot platform. Key Highlights from the Collaboration: Industrial-Grade Reliability: Delivered flawless, zero-intervention performance (1,800+ block stackings, 200+ box foldings) backed by 100,000-hour MTBF and ±0.02mm repeatability. 3x Trajectory Acceleration: Smooth, jitter-free servo control accelerated model iteration while maintaining predictable physical interactions. Real-Time Adaptability: Features a 360° motion range and sensitive force feedback, enabling GEN-1 to instantly correct unexpected execution errors. Global Technical Support: Backed by Elite Robots 24/7 technical network and local US team to support ongoing research and commercial deployment. As the “ChatGPT moment” for robotics arrives, Elite Robots continues to partner with global innovators to build robust hardware solutions for embodied AI. (Picture and data referenced from: Generalist AI Team, “GEN-1: Scaling Embodied Foundation Models to Mastery”, Generalist AI Blog, Apr 2026) SOURCE Elite Robots Your email address will not be published. Required fields are marked * Comment * Name * Email * Website Save my name, email, and website in this browser for the next time I comment. Copyright © 2024 Money Compass Media (M) Sdn Bhd. All Rights Reserved Login to your account below Remember Me Please enter your username or email address to reset your password. Copyright © 2024 Money Compass Media (M) Sdn Bhd. All Rights Reserved
Images (9): 


|
|||||
| MIT built a memory system that lets robots remember where … | https://thenextweb.com/news/mit-daaam-r… | 8 | Jul 27, 2026 08:00 | active | |
MIT built a memory system that lets robots remember where you left your keysURL: https://thenextweb.com/news/mit-daaam-robot-long-term-memory-objects Description: MIT's DAAAM framework gives robots long-term spatial memory by attaching language descriptions to 3D maps. Ask "where's my wallet?" and it searches its memory. Content:
DAAAM combines computer vision with 3D mapping so robots can track objects over time and answer natural language questions about where things are MIT’s DAAAM gives robots long-term memory by attaching language descriptions to 3D maps. You can ask “where did I leave my wallet?” and it knows. Robots are still surprisingly bad at remembering where things are. You might recall that your keys were on the kitchen counter last night. A robot working beside you would struggle to connect that object and location in a useful way. MIT researchers built a system called DAAAM to fix that. DAAAM stands for Describe Anything, Anywhere, Anytime, at Any Moment. It combines computer vision and 3D mapping to give robots a long-term spatial memory. As a robot moves through an environment, it attaches detailed language descriptions to objects it sees and stores them in a spatial map. Instead of just knowing there is an object at a coordinate, it remembers that there is a red bicycle with a flat tire near a specific building. A person can then ask natural language questions: “Where did I leave my wallet?” or “Go grab the component we started assembling last night.” The robot searches its memory for the right object and location. The system runs fast enough for a mobile robot to use in real time. The researchers found DAAAM answered questions more accurately than current methods, depending on the query type. The work was presented at the Conference on Computer Vision and Pattern Recognition (CVPR) and is available as a preprint on arXiv. The system is not ready for consumer products. It is a research framework that shows what is possible when you combine vision, language, and 3D spatial data into a persistent memory layer. The researchers are still working on giving the system better confidence levels and helping it remember significant events, not just static object placements. The gap DAAAM addresses is fundamental to useful robotics. Physical AI systems need to understand the real world, not just process text. A robot that can clean a house, manage a warehouse, or assist in a factory needs to know not just what it sees right now, but what it saw yesterday and where. Current robots either forget everything between tasks or require expensive pre-mapping of every environment. DAAAM’s approach is practical because it does not require the environment to be set up in advance. The robot builds its memory as it moves. MIT has been publishing a series of robotics breakthroughs this year, including an ultrasound wristband for remote robot control. DAAAM tackles the other side of the problem: not how to control a robot, but how to make it remember what it has seen. Intelligence without memory is not intelligence. It is reaction. Technology enthusiast and intern at The Next Web, contributing to research-backed content and investigating new technologies and global even (show all) Technology enthusiast and intern at The Next Web, contributing to research-backed content and investigating new technologies and global events. Interested in business and how the narrative and perception of technology is shaped. Get the most important tech news in your inbox each week. The heart of tech A Tekpon Company Copyright © 2006—2026, Cogneve, INC. Made with <3 in Amsterdam.
Images (8): 



|
|||||
| Wetour Robotics Outlines Orchestra Platform for Wearable Robotics Powered by … | https://www.manilatimes.net/2026/07/24/… | 10 | Jul 27, 2026 00:01 | active | |
Wetour Robotics Outlines Orchestra Platform for Wearable Robotics Powered by NVIDIA Jetson | The Manila TimesDescription: Orchestra Portable AI Hub Utilizes NVIDIA Jetson™ Platform for Real-Time Visual Perception, Gesture Recognition and Multi-Device Coordination Content:
Orchestra Portable AI Hub Utilizes NVIDIA Jetson™ Platform for Real-Time Visual Perception, Gesture Recognition and Multi-Device Coordination AUSTIN, Texas, July 24, 2026 (GLOBE NEWSWIRE) -- Wetour Robotics Limited (NASDAQ: WETO) ("Wetour Robotics" or the "Company"), a Physical AI infrastructure and wearable robotics company, today outlined Orchestra, its portable AI hub and operating system for wearable robotics. Orchestra is designed to enable real-time visual perception, gesture recognition and multi-device coordination by centralizing AI processing in a dedicated edge computing unit powered by NVIDIA Jetson. Developing Physical AI with NVIDIA Technologies Orchestra is designed to serve as the central intelligence and coordination layer for Physical AI and wearable robotics devices. By externalizing computing power from individual wearable endpoints into a dedicated portable hub, Orchestra enables devices such as smart glasses, gesture-control wristbands and body-worn sensors to remain lightweight and energy-efficient while the hub handles intensive AI processing, multi-device coordination and real-time decision-making. The Orchestra hub utilizes the NVIDIA Jetson platform for on-device inference, supporting two core technology modules: Vision-Link -- a visual perception and command pipeline that processes real-time visual input, performs scene understanding using NVIDIA-accelerated inference and translates visual context into actionable commands for connected physical devices. Conductor -- a neural gesture recognition and command translation system. Conductor reads electromyographic (EMG) signals from the wearer's wrist, uses proprietary algorithms running on NVIDIA Jetson to recognize continuous hand gestures in real time, and converts recognized gestures into precise control commands for connected devices such as exoskeletons, smart furniture and robotic arms. "NVIDIA Jetson is the computing foundation that makes Orchestra's real-time coordination possible," said Nan Zheng, Chief Executive Officer of Wetour Robotics. "Vision-Link turns what you see into machine action. Conductor turns how you move into machine commands. Both require low-latency, on-device AI processing enabled by NVIDIA edge computing. This is edge AI applied to the human body." Open Architecture Approach Orchestra is being developed with an open architecture approach. The Company intends to explore open interface protocols that would allow third-party hardware manufacturers, including makers of exoskeletons, smart furniture and robotic devices, to build on the Orchestra platform, while Wetour Robotics retains proprietary capabilities in its core intelligence engine, including Vision-Link and Conductor. "The real bottleneck in Physical AI is not building better robots -- it is imagining better use cases," Zheng added. "Orchestra, powered by NVIDIA edge AI computing, gives builders tools to create Physical AI applications at the performance level these use cases demand." About Wetour Robotics Limited Wetour Robotics Limited (NASDAQ: WETO), formerly known as Webus International Limited, is a Physical AI infrastructure and wearable robotics company developing Orchestra, a portable AI hub and operating system designed to coordinate human intent with intelligent physical devices. Orchestra's core technology modules include Vision-Link, a visual perception and command pipeline, and Conductor, a neural gesture recognition and command translation system. Wetour Robotics is headquartered in Austin, Texas. For more information, visit www.wetourrobotics.com. Forward-Looking Statements This press release contains forward-looking statements within the meaning of the safe harbor provisions of the U.S. Private Securities Litigation Reform Act of 1995, including statements regarding the development, capabilities, architecture, performance, interoperability and commercialization of Orchestra, Vision-Link and Conductor; the use and availability of NVIDIA technologies; and potential third-party adoption. Words such as "designed to," "intends," "expects," "plans," "may," and similar expressions identify forward-looking statements. These statements are based on the Company's current expectations and involve risks and uncertainties, including development delays, technical performance, availability and performance of third-party technologies, interoperability, commercialization, customer adoption, competition, capital resources and other risks described in the Company's filings with the U.S. Securities and Exchange Commission. Actual results may differ materially from those expressed or implied. The Company undertakes no obligation to update forward-looking statements except as required by law. Investor Relations Contact Annabelle Li Investor Relations - Wetour Robotics Limited [email protected]
Images (10): 
|
|||||
| TUM - Studentische Hilfskraft - Tutor Human-Robot Interaction Seminar | https://portal.mytum.de/schwarzesbrett/… | 10 | Jul 26, 2026 08:01 | active | |
TUM - Studentische Hilfskraft - Tutor Human-Robot Interaction SeminarURL: https://portal.mytum.de/schwarzesbrett/hiwi_stellen/NewsArticle_20260722_150633 Description: We are seeking a tutor (m/f/x) for our interdisciplinary seminar “Human-Robot Interaction” for the Winter Term 2026/27. Content:
22.07.2026, Studentische Hilfskräfte, Praktikantenstellen, Studienarbeiten We are seeking a tutor (m/f/x) for our interdisciplinary seminar “Human-Robot Interaction” for the Winter Term 2026/27. Description: We are seeking a tutor (m/f/x) for our interdisciplinary seminar “Human-Robot Interaction” for the Winter Term 2026/27. In this seminar, students explore various application areas of human-robot interaction (HRI). Working in teams, they prepare and lead seminar sessions on specific topics, such as “HRI in Healthcare”. Each session involves a presentation by the student group, followed by a guided discussion. Some sessions may also include a hands-on workshop involving a robotic system. Given the tight timeline of the academic semester, your job would be to support student teams by offering help in setting up and using robotic systems and assisting with organizational matters. Prerequisites: - Motivated to assist students in overcoming technical setup challenges. - Experience with programming languages such as Python and robotics software environments such as ROS is a plus. - Experience with platforms used in hobbyist robotics is a plus. Kontakt: jakob.reinhardt@tum.de Aktuelles Dr. Karl Wamsler Innovation Award für Frances H. Arnold und Tao Zhang TUM baut strategische Partnerschaft mit dem MIT aus Materialien für Fusionskraftwerke testen MCube MOSAIQ startet Umgestaltungen in den Quartieren Schwabing-West und Moosach TUM Campus Heilbronn stärkt seine Kompetenzen im Chipdesign Gemeinsam für Olympia no events today.
Images (10): 



|
|||||
| Desarrollan una nueva generación de robots capaces de aprender cuándo … | https://fundaciondescubre.es/noticias/n… | 10 | Jul 25, 2026 08:00 | active | |
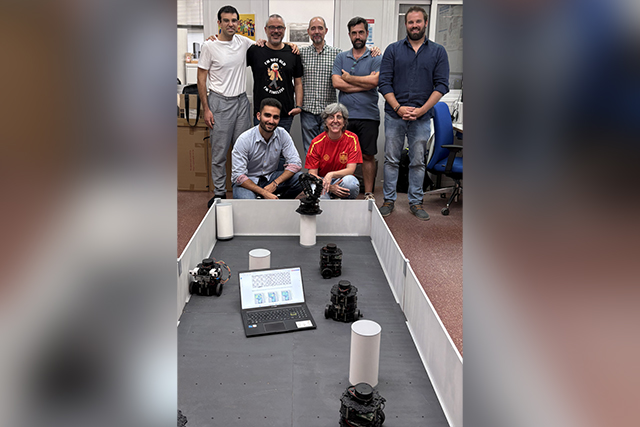
Desarrollan una nueva generación de robots capaces de aprender cuándo actuar - Fundación DescubreURL: https://fundaciondescubre.es/noticias/nueva-generacion-de-robots-capaces-de-aprender-cuando-actuar/ Description: Investigadores del Instituto de Investigación en Ingeniería Mecatrónica y Sistemas Ciberfísicos de la Universidad de Málaga (IMECH.UMA) han desarrollado un nuevo enfoque de inteligencia artificial que permite a los robots aprender no solo qué decisión tomar, sino también cuándo tomarla, incorporando el tiempo como un factor esencial en su proceso de aprendizaje. Content:
Síguenos VOLVER Investigadores del Instituto de Investigación en Ingeniería Mecatrónica y Sistemas Ciberfísicos de la Universidad de Málaga (IMECH.UMA) han desarrollado un nuevo enfoque de inteligencia artificial que permite a los robots aprender no solo qué decisión tomar, sino también cuándo tomarla, incorporando el tiempo como un factor esencial en su proceso de aprendizaje. Fuente: Universidad de Málaga inteligencia artificial Investigadores del Instituto de Investigación en Ingeniería Mecatrónica y Sistemas Ciberfísicos de la Universidad de Málaga (IMECH.UMA) han desarrollado un nuevo enfoque de inteligencia artificial que permite a los robots aprender no solo qué decisión tomar, sino también cuándo tomarla, incorporando el tiempo como un factor esencial en su proceso de aprendizaje. El trabajo se desarrolla en el marco del proyecto TYRELL (Time in Reinforcement Learning for Robotics), financiado por el Ministerio de Ciencia, Innovación y Universidades, y aborda un aspecto habitualmente ignorado en el aprendizaje por refuerzo (Reinforcement Learning), una de las técnicas de inteligencia artificial más empleadas para dotar de autonomía a los robots. En la mayoría de los sistemas actuales, los robots toman decisiones a intervalos de tiempo fijos. Sin embargo, el equipo del IMECH.UMA propone que esos intervalos se adapten dinámicamente a cada situación. «Al igual que una persona no necesita reaccionar con la misma frecuencia cuando conduce por una autopista que cuando maniobra para aparcar, un robot tampoco debería tomar decisiones siempre al mismo ritmo», explica el investigador principal del proyecto, Juan Antonio Fernández Madrigal. En este sentido, explica que en la mayoría de los algoritmos de navegación existentes, los robots toman decisiones a intervalos de tiempo fijos definidos previamente por el diseñador del sistema. Sin embargo, tal y como explicaba Fernández Madrigal anteriormente, no todas las situaciones requieren el mismo nivel de atención. Por tanto, los investigadores sostienen que “en zonas con obstáculos o gran incertidumbre conviene reaccionar rápidamente, mientras que en otras el robot puede mantener una misma acción durante más tiempo, reduciendo el consumo energético y el esfuerzo computacional”. “Nuestro robot aprende automáticamente cuándo necesita prestar mucha atención al entorno y cuándo puede mantener una acción durante más tiempo porque el riesgo es menor. Estos mapas reflejan esa intensidad temporal de la atención y permiten aprovechar mucho mejor el tiempo de cómputo, algo especialmente importante en robots de pequeño tamaño”, señala Adrián Bañuls Arias, primer autor del artículo e investigador predoctoral del proyecto. Los investigadores han desarrollado los denominados ‘Mapas de Tiempo Subjetivo’ (Subjective Time Maps), una nueva representación del entorno que permite al robot aprender qué frecuencia de decisión resulta más adecuada en cada zona. De este modo, pueden reaccionar con rapidez en situaciones complejas y espaciar sus decisiones cuando el entorno es más favorable, mejorando simultáneamente la seguridad, la precisión de la navegación y la eficiencia energética y computacional. El equipo, al completo. De izquierda a derecha, Vicente Arévalo, Juan Manuel Gandarias, Ana Cruz, Manuel Castellano y Juan Antonio Fernández Madrigal. Abajo, Adrián Bañuls y Cipriano Galindo. Además de su interés científico, el proyecto apuesta por la ciencia abierta mediante la publicación de bibliotecas de software, simuladores y conjuntos de datos experimentales que facilitan la reproducción y validación de los resultados por otros grupos de investigación. Los resultados más recientes de esta investigación han sido publicados en la revista internacional ‘Computer Modeling in Engineering & Sciences’, donde el equipo demuestra que este nuevo enfoque permite optimizar la navegación autónoma incluso cuando existen incertidumbres en la localización del robot o retrasos en las comunicaciones. El proyecto TYRELL reúne a investigadores de la Universidad de Málaga, la Örebro University (Suecia) y la École Polytechnique Fédérale de Lausanne (EPFL) (Suiza), y estudia cómo la dimensión temporal puede mejorar el aprendizaje tanto en robots móviles como en manipuladores robóticos, con aplicaciones potenciales en logística, agricultura, inspección industrial, robótica de servicios o misiones de búsqueda y rescate. Esta investigación, liderada por la Estación Biológica de Doñana y realizada con mosquitos silvestres del sur de España, aporta nuevas claves sobre los factores que pueden influir en la capacidad de estos insectos para transmitir patógenos. Un nuevo estudio de la Universidad de Granada analiza las consecuencias a largo plazo de la restricción del crecimiento extrauterino (EUGR), que afecta al 37% de los prematuros. Los investigadores han detectado posibles alteraciones estructurales cerebrales persistentes. Un estudio dirigido por la Universidad Pablo de Olavide ha permitido contrastar sobre el terreno varias hipótesis planteadas mediante georradar y documentación digital, además de aportar nuevos datos sobre los jardines y una gran piscina circular. #CienciaDirecta Tu fuente de noticias sobre ciencia andaluza Más información Suscríbete Suscríbete a nuestro boletín Una web de: Con la colaboración de la Fundación Española para la Ciencia y la Tecnología — Ministerio de Ciencia, Innovación y Universidades Alojado en: Herramientas de accesibilidad
Images (10): 

|
|||||
| Curiosity-powered AI robots learn language faster, behave like children | https://interestingengineering.com/ai-r… | 10 | Jul 25, 2026 08:00 | active | |
Curiosity-powered AI robots learn language faster, behave like childrenURL: https://interestingengineering.com/ai-robotics/curiosity-powered-ai-robots-language-faster Description: Curiosity-driven AI robots learned language twice as fast, revealing clues about child language acquisition and smarter AI. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Discover the engineering revolution transforming modern defense with Strength, Stealth, Speed: The Very Fast Future of Advanced Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Future of Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Robots exposed to 180 language combinations achieved 85% generalization, versus 25% with 48, highlighting the power of diverse input. A team of researchers has developed AI-powered virtual robots that learn to understand language more efficiently by rewarding curiosity rather than rote instruction, offering new insights into how children acquire language. Researchers at the Okinawa Institute of Science and Technology (OIST) found that robots trained to explore and satisfy their curiosity mastered language-based tasks in about half the time of conventionally trained robots. The brain-inspired system also displayed spontaneous play-like behavior and improved ability to handle unfamiliar situations, suggesting that curiosity-driven learning could make future AI systems more adaptable and human-like. “We were amazed by the play-like behavior and exception-handling performance that emerged independently during training,” says Theodore Tinker, study first author and PhD student in the Cognitive Neurorobotics Research Unit at OIST, in a statement. The OIST team has developed a curiosity-driven AI system that enables virtual robots to learn language more like children, offering new insights into both artificial intelligence and human language acquisition. Unlike large language models (LLMs), which generate responses by predicting the most likely next word from vast datasets, the researchers used a brain-inspired architecture known as a Predictive Coding-inspired Variational Recurrent Neural Network (PV-RNN). The model is designed to minimize “Free Energy” by balancing two competing goals: improving prediction accuracy while minimizing changes to its internal beliefs. In other words, the robot aims to correctly understand the world while maintaining a stable internal model of it. To encourage exploration, the team combined the PV-RNN with reinforcement learning. Robots received an external reward for completing language-guided tasks and an internal reward for satisfying curiosity by exploring unfamiliar situations that required updating their internal understanding. This balance between stability and exploration enabled the robots to discover new solutions to complex tasks more efficiently. During training, the curious robots displayed unexpected play-like behavior. Even after mastering assigned tasks, they continued experimenting by knocking over objects, despite receiving no direct instruction to do so. Researchers found that this spontaneous exploration accelerated language learning, suggesting that curiosity-driven play may be crucial to acquiring knowledge, much as it is for young children. “The robots are not thinking like children, and their situation is very abstract compared to the extremely dense language environments of children. But this abstract environment allows us to study the impact of curiosity within a very convincing model of how humans learn to process language,” said Jun Tani, study senior author and head of the OIST unit, in a statement. The study also sheds light on a long-standing question in linguistics known as Noam Chomsky’s “Poverty of the Stimulus” problem, which asks how children rapidly learn language despite receiving incomplete and imperfect input. The researchers found that curiosity alone was not enough; it had to be paired with a rich and diverse language environment. Robots exposed to only 48 language combinations achieved about 25 percent generalization. In comparison, those trained with 180 combinations reached around 85 percent, demonstrating that varied linguistic exposure dramatically improved their ability to understand previously unseen instructions. Another surprising finding was that the robots exhibited a learning pattern similar to toddlers’ U-shaped learning curve. To test this, researchers deliberately reversed the meanings of two language tasks. Initially, the robots learned the exceptions correctly, but as they generalized broader language rules, their performance temporarily declined before recovering as they mastered the exceptions. This mirrors how children often say “goed” or “runned” before eventually learning irregular verbs correctly. According to the researchers, the emergence of this behavior was entirely unexpected, as the AI model contained no explicit mechanism for handling exceptions or overgeneralization. Beyond improving robotic language learning, the transparent design of the PV-RNN allows scientists to observe the AI’s internal decision-making process in real time. Unlike massive black-box AI systems, researchers can directly examine how the robot updates its beliefs, making the model a valuable platform for studying both human cognition and the mechanisms underlying language acquisition. Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Images (10): |
|||||
| Medium | https://ujangriswanto08.medium.com/how-… | 4 | Jul 25, 2026 08:00 | active | |
MediumDescription: How MADDPG Combines Deep Learning with Multi-Agent Strategies Exploring the Algorithm That Helps Multiple AI Agents Learn, Collaborate, and Compete in Complex Environments Imagine teaching a dog to … Content:
Sign up Sign in Sign up Sign in -- Listen Share Imagine teaching a dog to fetch a ball. Eventually, it learns that bringing the ball back earns a reward. Now imagine teaching ten dogs to work together to herd sheep while competing with another team of dogs. Suddenly, things become much more complicated. That’s essentially the difference between traditional Reinforcement Learning (RL) and Multi-Agent Reinforcement Learning (MARL). For years, reinforcement learning focused on a single agent interacting with an environment. But the real world rarely works that way. Cars share roads. Drones fly in groups. Robots collaborate in factories. Even financial markets can be thought of as thousands of agents making decisions simultaneously. As AI systems become more social, researchers need algorithms capable of handling cooperation, competition, and everything in between. Enter MADDPG. Short for Multi-Agent Deep Deterministic Policy Gradient, MADDPG extends an earlier algorithm called DDPG and adapts it for environments with multiple intelligent agents. It combines neural networks, shared learning experiences, and a clever training strategy that allows agents to become surprisingly effective teammates — or rivals. Let’s unpack how it all works. At its core, reinforcement learning is simple: Over time, the agent learns which actions lead to higher rewards. Think of a robot vacuum: Eventually, the robot becomes pretty good at its job. But here’s the catch: traditional RL assumes the environment stays relatively stable. What happens if there are five robot vacuums sharing the same room? Now each robot changes the environment for the others. Suddenly, every agent has moving targets to deal with. Welcome to the world of multi-agent systems. Multi-Agent Reinforcement Learning introduces multiple agents interacting in a shared environment. These environments generally fall into three categories: Everyone works toward a common goal. Examples: Agents compete against one another. Examples: Some agents cooperate while competing with others. Examples: This creates several major challenges. 1. Non-Stationarity. In traditional RL, the environment doesn’t constantly change. In MARL, every agent is learning simultaneously. Imagine trying to play soccer while all the rules change every five seconds. That’s what training can feel like for AI agents. 2. Coordination. Agents must learn when to work together. Two drones searching opposite sides of a building are efficient. Ten drones searching the same corner? Not so much. 3. Scalability. Adding more agents increases complexity dramatically. One agent is manageable. One hundred agents can become computational chaos. Before understanding MADDPG, we need to meet its predecessor: DDPG. DDPG stands for Deep Deterministic Policy Gradient, an algorithm designed for environments with continuous actions. Instead of choosing between discrete options like: DDPG handles actions like: This makes it especially useful for robotics and autonomous systems. DDPG relies on two neural networks: The actor decides what action to take. Think of it as the “decision-maker.” “I think turning the steering wheel by 15 degrees is the best move.” The critic evaluates the actor’s decision. “That was a terrible idea. You drove into a wall.” Together, they form an actor-critic architecture. DDPG also uses: Over time, the actor improves while the critic becomes better at judging actions. The problem? DDPG was designed for one agent — not twenty. Researchers asked a simple question: What if every agent had its own actor but shared more information during training? The result was MADDPG. Introduced in 2017, MADDPG extended DDPG into multi-agent environments and quickly became one of the most influential MARL algorithms. Its biggest innovation is something called: This sounds complicated, but the idea is surprisingly intuitive. Imagine preparing a soccer team. During practice: During the actual match: That’s CTDE. During training, agents have access to extra information. During deployment, they operate independently. This approach gives MADDPG the best of both worlds. Deep learning is the engine that powers MADDPG. Each agent typically has: These networks learn patterns from large amounts of experience. For example, an autonomous drone might learn: Instead of manually programming every rule, neural networks discover strategies on their own. The actor learns: “Move north when teammates cover the east side.” The critic learns: “That strategy usually leads to mission success.” Over thousands — or millions — of training episodes, agents become increasingly sophisticated. One of deep learning’s biggest strengths is handling high-dimensional data. MADDPG can process: Without neural networks, managing this complexity would be nearly impossible. Here’s where MADDPG becomes particularly clever. Each agent has its own actor network. This means Agent A can behave completely differently from Agent B. However, during training, critics receive broader information, including: Think of critics as coaches reviewing game footage. They can say: “Agent 3 should have moved left because Agent 5 was already covering that area.” This extra visibility dramatically improves learning stability. Without centralized critics, agents often struggle because they can’t determine whether a failure was caused by: MADDPG reduces this uncertainty. Let’s walk through a simplified training cycle. Each agent collects observations. Examples: Actor networks generate actions. Examples: The world changes. Agents receive: Experiences are saved in replay buffers. For example: Critics examine: This broader perspective helps identify successful strategies. Neural networks adjust their parameters. Over many iterations, agents improve. Repeat this process a few million times and you’ll often end up with surprisingly capable AI teams. MADDPG became popular for several reasons. Many real-world tasks aren’t discrete. Robots don’t move in neat grid patterns. Cars don’t choose between “go” and “stop.” MADDPG excels in these environments. Few algorithms comfortably handle both. MADDPG works well in: Centralized critics reduce uncertainty. This often leads to faster and more reliable training. MADDPG can be adapted to numerous domains without major architectural changes. That’s a huge advantage for researchers. No algorithm is perfect. MADDPG has several limitations. Adding agents increases complexity quickly. Ten agents? Manageable. A thousand agents? That’s a different story. Training multiple actors and critics requires significant resources. Researchers often need: Small changes can impact performance: Finding the right combination can feel like tuning a musical instrument with hundreds of strings. Modern MARL research increasingly focuses on algorithms designed for larger populations of agents. MADDPG remains influential but isn’t always the best choice for large-scale environments. MADDPG’s capabilities make it useful across many industries. Cars can learn to: Groups of robots can: AI agents can optimize: Multi-agent simulations help researchers model: MADDPG has been applied to: Imagine dozens of drones coordinating to locate survivors after an earthquake. That’s exactly the kind of scenario MADDPG was designed for. MADDPG isn’t alone in the MARL ecosystem. AlgorithmStrengthMADDPGContinuous controlMAPPOStable policy optimizationQMIXCooperative tasksVDNSimplicityIndependent PPOScalability In recent years, MAPPO has become particularly popular due to its stability across many benchmark tasks. However, MADDPG still remains a go-to choice when: Its influence can still be seen in many modern MARL approaches. The good news? You don’t need a PhD to experiment with MADDPG anymore. Popular tools include: A typical workflow looks like this: Fortunately, many open-source implementations are available online, making it easier than ever to get started. If you’ve already experimented with reinforcement learning, MADDPG is an excellent next step into the world of collaborative AI. MADDPG may be nearly a decade old, but its ideas continue to shape modern research. Current trends include: Researchers are increasingly interested in building AI systems that behave less like isolated individuals and more like societies. That’s an exciting shift. The future of AI isn’t just one incredibly smart machine. It may be millions of intelligent agents learning to cooperate. And MADDPG helped pave the way. MADDPG represents an important milestone in artificial intelligence. By combining deep learning with multi-agent strategies, it showed researchers that AI agents can learn not only from their environments but also from each other. Its centralized training and decentralized execution framework remains one of the most elegant ideas in Multi-Agent Reinforcement Learning. While newer algorithms continue to emerge, MADDPG’s legacy is secure. It proved that collaboration, competition, and coordination can all be learned — and that some of the most fascinating forms of intelligence emerge when multiple minds work together. In many ways, MADDPG reminds us of something humans figured out long ago: Sometimes, the smartest solutions come from teamwork. -- -- web developer, uiux enthusiast and currently learning about artificial intelligence Help Status About Careers Press Blog Store Privacy Rules Terms Text to speech
Images (4): 



|
|||||
| Medium | https://ujangriswanto08.medium.com/a-be… | 4 | Jul 25, 2026 08:00 | active | |
MediumDescription: A Beginner’s Guide to Multi-Agent Reinforcement Learning (Part 2) Learn how multiple AI agents cooperate, compete, and communicate to solve complex problems, with beginner-friendly explanations and … Content:
Sign up Sign in Sign up Sign in -- Listen Share In Part 1, we explored the foundations of Multi-Agent Reinforcement Learning (MARL). We learned how it extends traditional Reinforcement Learning by allowing multiple AI agents to learn simultaneously, whether they’re cooperating, competing, or doing a bit of both. Now it’s time to look at what makes these systems actually work. How do multiple agents learn without getting in each other’s way? How do they communicate? Where is MARL being used today? And perhaps most importantly, how can you start experimenting with it yourself? Let’s dive in. Once multiple agents are involved, choosing the right learning algorithm becomes much more important. Different algorithms are designed for different situations, depending on whether agents are cooperating, competing, or operating in mixed environments. You don’t need to understand every mathematical detail to appreciate the big picture, so let’s look at the most common approaches. The simplest idea is surprisingly straightforward: Treat every agent as if it were learning alone. Each agent has its own policy, collects its own experiences, and updates its own model independently. This approach is easy to implement and often works well in small environments. However, it has a major drawback. Remember from Part 1 that every learning agent changes the environment for the others. Since each agent ignores this fact, learning can become unstable as teammates and opponents constantly change their behavior. Despite its limitations, Independent Q-Learning is still a great starting point for beginners. Instead of letting every agent learn completely independently, value-based methods encourage cooperation by combining information from multiple agents. Some popular examples include: These methods are especially useful in cooperative environments where the entire team shares the same objective. Imagine several warehouse robots trying to minimize delivery time. Rather than rewarding each robot separately, the algorithm focuses on improving the performance of the whole team. Some problems involve continuous or highly complex actions where simple value tables are no longer practical. Policy gradient methods solve this by learning the policy directly instead of estimating action values. Popular MARL policy gradient algorithms include: These algorithms are commonly used in research because they handle large and complex environments more effectively than traditional value-based methods. Actor-Critic algorithms combine two different components: One well-known example is MADDPG (Multi-Agent Deep Deterministic Policy Gradient). MADDPG is particularly useful when multiple agents operate independently while still influencing one another. Actor-Critic methods have become some of the most powerful tools in modern Reinforcement Learning because they balance exploration and learning efficiently. Imagine trying to play soccer with teammates who never talk. Everyone might be talented individually, but without communication, passing, defending, and attacking would quickly become chaotic. AI agents face a similar challenge. In many MARL environments, communication is just as important as decision-making. Here, agents intentionally exchange information. For example, a rescue drone might send messages such as: Sharing information allows teammates to coordinate much more effectively. Communication doesn’t always involve sending messages. Sometimes agents simply observe one another’s actions. Imagine one warehouse robot moving toward Shelf A. Another robot notices this and decides to retrieve items from Shelf B instead. No words were exchanged, but useful information was still communicated through behavior. This is known as implicit communication. One of the most exciting areas of MARL research is allowing agents to develop their own communication strategies. Instead of programmers defining every message manually, agents learn: In some research environments, AI agents have even developed surprisingly efficient communication protocols that humans never explicitly designed. Although MARL sounds like a research topic, it’s already influencing many industries. Let’s look at some examples. Modern warehouses increasingly rely on fleets of autonomous robots. Each robot may be responsible for: Without coordination, robots would waste time blocking one another. MARL helps optimize the behavior of the entire fleet instead of just individual robots. Imagine every self-driving car making decisions without considering nearby vehicles. Traffic would quickly become inefficient. MARL allows vehicles to coordinate by: Instead of thinking like isolated drivers, the vehicles learn to act as part of a larger transportation system. Groups of robots often perform tasks that would be difficult for a single machine. Examples include: By learning together, robots can divide work efficiently and adapt to changing situations. Many breakthroughs in MARL have come from games. Examples include: Games provide safe environments where thousands of learning episodes can be simulated quickly. Financial markets involve many decision-makers interacting simultaneously. Researchers are exploring MARL for: While still an active research area, MARL has the potential to model complex market interactions more realistically than single-agent systems. Cities are full of interconnected systems. MARL can help optimize: Rather than optimizing each system separately, MARL seeks solutions that improve the overall efficiency of the city. The good news is that you don’t have to build everything from scratch. Several excellent open-source libraries make experimenting with MARL much easier. PettingZoo is one of the most popular environments for Multi-Agent Reinforcement Learning. It provides standardized environments that allow researchers and beginners to test different algorithms consistently. RLlib is a scalable Reinforcement Learning framework built on the Ray ecosystem. It supports many MARL algorithms and is designed for distributed training, making it suitable for both research and production. MARLlib extends RLlib with algorithms specifically designed for multi-agent learning. It offers ready-to-use implementations of many popular research methods. Although these aren’t MARL libraries themselves, they’re the deep learning frameworks that power many Reinforcement Learning implementations. Most modern research projects use one of these frameworks. Building a MARL project usually follows a series of steps. Create the world where agents will interact. Examples include a warehouse, traffic system, or game. Decide how many agents will participate and what each one can observe. Specify what actions each agent is allowed to perform. For example: Reward design is one of the most important parts of MARL. Rewards should encourage behaviors that benefit the desired objective, whether that’s teamwork, efficiency, or successful competition. Select a learning method that matches the environment. Simple problems may only require Independent Q-Learning, while larger cooperative tasks often benefit from algorithms like QMIX or MAPPO. Run many training episodes, evaluate performance, adjust parameters, and repeat until the agents consistently perform well. Like most machine learning projects, improvement comes through experimentation. Let’s put everything together with a simple example. Imagine a warehouse with five autonomous robots. Their goal is to deliver customer orders as quickly as possible. Each robot can: If every robot acted selfishly, several problems could occur. Two robots might chase the same package. Hallways could become blocked. Charging stations might become overcrowded. Instead, MARL encourages teamwork. One robot retrieves nearby packages. Another clears busy pathways. A third handles deliveries. Others recharge strategically to avoid congestion. Although each robot makes its own decisions, the team gradually learns behaviors that maximize the warehouse’s overall efficiency. This is a perfect example of how local decisions can produce intelligent global behavior. At first glance, Multi-Agent Reinforcement Learning may seem like “regular Reinforcement Learning with more agents.” In reality, the differences run much deeper. The biggest difference is that every learning agent becomes part of everyone else’s environment, making the learning process far more dynamic. If you’re just getting started, here are a few pitfalls to avoid. MARL is still an active area of research, but its future looks incredibly promising. Researchers are exploring how MARL can work alongside other AI technologies, especially Large Language Models (LLMs). Imagine teams of AI assistants that can divide tasks, share information, and solve problems collaboratively instead of relying on a single model. Beyond that, MARL is expected to play a growing role in: As computing power increases and algorithms become more efficient, we’ll likely see AI systems that can cooperate on an unprecedented scale. Multi-Agent Reinforcement Learning takes one of the most exciting areas of artificial intelligence and makes it even more powerful by introducing collaboration and competition among multiple intelligent agents. While the field is more complex than traditional Reinforcement Learning, the underlying idea is surprisingly natural: intelligent systems often perform better when they learn to work together — or strategically compete — rather than act alone. Whether it’s coordinating warehouse robots, managing traffic in smart cities, enabling teams of autonomous drones, or creating more realistic game AI, MARL is helping shape the next generation of intelligent systems. If you’re just beginning your Reinforcement Learning journey, don’t feel pressured to master every MARL algorithm right away. Start with the fundamentals of single-agent RL, experiment with beginner-friendly environments like PettingZoo, and gradually build your understanding of multi-agent systems. -- -- web developer, uiux enthusiast and currently learning about artificial intelligence Help Status About Careers Press Blog Store Privacy Rules Terms Text to speech
Images (4):
|
|||||
| Physical AI ETF KOID: NVIDIA, Unitree, Sharpa, And The Next … | https://seekingalpha.com/article/491359… | 0 | Jul 25, 2026 00:01 | active | |
Physical AI ETF KOID: NVIDIA, Unitree, Sharpa, And The Next Leg Of The Humanoid TradeDescription: NVIDIA just made a major move into humanoid robotics, and it chose Unitree as its launch partner. Read more here. Content: |
|||||
| Microsoft prueba ChatGPT en robots | https://www.iprofesional.com/tecnologia… | 10 | Jul 24, 2026 08:01 | active | |
Microsoft prueba ChatGPT en robotsURL: https://www.iprofesional.com/tecnologia/377941-microsoft-esta-probando-chatgpt-en-robots Description: El objetivo de la investigación es ver si ChatGPT puede pensar más allá del texto y razonar sobre el mundo físico para ayudar con las tareas de robótica Content:
Microsoft anunció que está investigando el modo en que se producen las interacciones entre humanos y robots, utilizando para ello la tecnología de inteligencia artificial ChatGPT en estas máquinas. Desarrollado por OpenAI, ChatGPT tiene capacidad para generar y enlazar ideas, así como para recordar conversaciones. En el último mes, la compañía fue integrando esta tecnología en sus diferentes servicios, comenzando con Azure OpenAI Service a mediados de enero, para llevarla después a su motor de búsqueda Bing y su navegador Edge. Su última iteración se ha materializado en la vista previa del nuevo Bing basado en inteligencia artificial en las aplicaciones para móviles y en su navegador Edge, así como la versión del motor de búsqueda para Skype. Ahora, el fabricante tecnológico adelantó que está probando esta tecnología en robots, para "hacer posibles las interacciones naturales" con humanos y ha explicado qué es lo que espera de esta integración. "Nuestro objetivo con esta investigación es ver si ChatGPT puede pensar más allá del texto y razonar sobre el mundo físico para ayudar con las tareas de robótica", ha comentado Microsoft en un comunicado, donde ha matizado que busca "ayudar a las personas a interactuar con los robots más fácilmente, sin necesidad de aprender lenguajes de programación complejos ni detalles sobre sistemas robóticos". En este sentido, ha establecido como desafío enseñar a este chatbot a resolver problemas teniendo en cuenta factores como el contexto del entorno operativo y el modo en que "las acciones físicas pueden cambiar el estado del mundo". La empresa señala que este producto de OpenAI tiene capacidades para llevar a cabo tareas por sí mimo, pero que ha desarrollado una serie de principios de diseño que se pueden utilizar para guiar los modelos de lenguaje hacia la resolución de tareas de robótica. Por otra parte, ha indicado que ChatGPT puede "desbloquear un nuevo paradigma de la robótica", en la que habitualmente se suceden procesos lentos, costosos e ineficientes de reescritura del código del comportamiento del robot. De esa forma, este chatbot tiene la capacidad de brindar comentarios de alto nivel al denominado modelo de lenguaje extenso o de gran tamaño (LLM, por sus siglas en inglés), a la vez que monitoriza el rendimiento del robot y generar código para diferentes escenarios de robótica. "Lo que está pasando a nuestro alrededor es real e irreal a la vez": cosas del día a día que nos costará distinguir si tienen detrás a una IA Para impulsar el LLM, Microsoft construyó una serie de principios de diseño destinados a escribir indicaciones para tareas de robótica. Para ello definió un conjunto de interfaces de programación de aplicaciones (API) robóticas. Una vez escrito el mensaje de texto para que ChatGPT lo interprete, en el que se describe el objetivo de la tarea que debe realizar la máquina, se indica explícitamente lo que debe hacer, lo que no debe hacer o cómo el chatbot debe formular sus respuestas. El desarrollador o ingeniero aguarda la respuesta o salida del código de ChatGPT utilizando un simulador y, si es necesario, utiliza lenguaje natural para evaluar a la IA sobre la calidad y la seguridad de sus contestaciones. Una vez el modelo haya respondido del modo deseado y la solución es viable, se implementa en el robot el código final del chat de inteligencia artificial. La compañía tecnológica compartió una serie de experimentos para mostrar cuáles son las acciones a las que pueden responder los robots utilizando el modelo desarrollado por OpenAI. En primer lugar, le hizo saber los pasos que han de segurise para controlar un dron real y este supo escribir estructuras de código complejas, como un patrón en zigzag para visualizar las baldas de una estantería. ChatGPT también se utilizó con el simulador Microsoft AirSim, un escenario en el que el modelo "pudo analizar la intención del usuario" y las señales detalladas para controlar un dron con precisión. Bing ha llegado a tener hasta una crisis existencial en una conversación con un usuario. Este lenguaje se probó, incluso, en un escenario de manipulación con un brazo robótico. Tras analizar las directrices, ChatGPT supo encadenar una serie de habilidades aprendidas para, entre otras actividades, apilar bloques de madera. Los desarrolladores también optaron por atribuir a estos robots objetivos como encontrar objetos, mediante funciones de detección. Asimismo, realizó experimentos adicionales para evaluar si el chatbot puede decidir dónde dirigir a la máquina en función de lo que debía buscar. iProfesional - Copyright ©2026. Emprendimientos Corporativos S.A. Buenos Aires, Argentina. Todos los derechos reservados. Director: Norberto Zocco contacto@iprofesional.com
Images (10): 
:quality(75):max_bytes(102400)/https://assets.iprofesional.com/assets/jpg/2019/11/486391.jpg)
/https://assets.iprofesional.com/assets/public/lazyload.gif)
|
|||||
| Learn Robotics Programming (Packt) | https://www.i-programmer.info/book-watc… | 2 | Jul 24, 2026 00:03 | active | |
Learn Robotics Programming (Packt)URL: https://www.i-programmer.info/book-watch-archive/19018-learn-robotics-programming-packt.html Description: Programming book reviews, programming tutorials,programming news, C#, Ruby, Python,C, C++, PHP, Visual Basic, Computer book reviews, computer history, programming history, joomla, theory, spreadsheets and more. Content:
Subtitled "Build and control cutting-edge AI robots with Raspberry Pi and Python" in this book Danny Staple Trovides a structured, hands-on path to designing and building robots using Raspberry Pi and Python. Readers start by assembling a mobile robot and setting up its core systems, then progressively add capabilities such as motor control, sensor integration, and remote operation through web interfaces. <ASIN:1803246987 > Later chapters show how to implement vision and voice features using OpenCV and ML voice models and explore intelligent behaviors, including localisation and sensor fusion, to help your robot navigate and respond to its environment. By the end of the book, you’ll have built a fully functional robot and developed the skills to design, program, and extend your own robotic systems. Author: Danny Staple Publisher: Packt PublishingDate: May 2026Pages: 740ISBN: 978-1803246987Print: 1803246987Kindle: B0CYWCX7MQAudience: Python programmers interested in roboticsLevel: Introductory/IntermediateCategory: Hardware platforms Topics include: For recommendations of Python books see Books for Pythonistas and Python Books For Beginners in our Programmer's Bookshelf section. For more Book Watch just click. Book Watch is I Programmer's listing of new books and is compiled using publishers' publicity material. It is not to be read as a review where we provide an independent assessment. To have new titles included in Book Watch contact BookWatch@i-programmer.info Subscribe to I Programmer's Books RSS feed for each day's new addition to Book Watch and for new reviews. For more Book Watch just click. Book Watch is I Programmer's listing of new books and is compiled using publishers' publicity material. It is not to be read as a review where we provide an independent assessment. To have new titles included in Book Watch contact BookWatch@i-programmer.info Subscribe to I Programmer's Books RSS feed for each day's new addition to Book Watch and for new reviews. SQL Query Design Patterns and Best PracticesAuthor: Steve Hughes et alPublisher: Packt PublishingPages: 270ISBN: 978-1837633289Print: 1837633282Kindle: B0BWRD7HQ7Audience: Query writersRating: 2.5Reviewer: Ian Stirk This book aims to improve your SQL queries using design patterns, how does it fare? + Full Review Balancing Coupling in Software Design Author: Vlad KhononovPublisher: Addison-WesleyDate: October 2024Pages: 320ISBN: 978-0137353484Print: 0137353480Kindle: B09RV3Z3TPAudience: GeneralRating: 4.5Reviewer: Kay Ewbank This book looks in detail at coupling, the degree of interdependence between software modules, and how to use coupling [ ... ] + Full ReviewMore ReviewsFunctional Design (Addison-Wesley)Learn Enough JavaScript to Be DangerousDriving Value With Sprint GoalsR for the Rest of UsWeb Design, 7e (In Easy Steps)Machine Learning Q and AI (No Starch Press)Bare Metal CData Structures & Algorithms in Python Author: Steve Hughes et alPublisher: Packt PublishingPages: 270ISBN: 978-1837633289Print: 1837633282Kindle: B0BWRD7HQ7Audience: Query writersRating: 2.5Reviewer: Ian Stirk This book aims to improve your SQL queries using design patterns, how does it fare? Author: Steve Hughes et alPublisher: Packt PublishingPages: 270ISBN: 978-1837633289Print: 1837633282Kindle: B0BWRD7HQ7Audience: Query writersRating: 2.5Reviewer: Ian Stirk This book aims to improve your SQL queries using design patterns, how does it fare? Author: Vlad KhononovPublisher: Addison-WesleyDate: October 2024Pages: 320ISBN: 978-0137353484Print: 0137353480Kindle: B09RV3Z3TPAudience: GeneralRating: 4.5Reviewer: Kay Ewbank This book looks in detail at coupling, the degree of interdependence between software modules, and how to use coupling [ ... ] Author: Vlad KhononovPublisher: Addison-WesleyDate: October 2024Pages: 320ISBN: 978-0137353484Print: 0137353480Kindle: B09RV3Z3TPAudience: GeneralRating: 4.5Reviewer: Kay Ewbank This book looks in detail at coupling, the degree of interdependence between software modules, and how to use coupling [ ... ]
Images (2): 

|
|||||
| Figure robot gets AI brain that enables human-like full-body control | https://interestingengineering.com/ai-r… | 10 | Jul 23, 2026 16:01 | active | |
Figure robot gets AI brain that enables human-like full-body controlURL: https://interestingengineering.com/ai-robotics/figure-helix02-upgrades-humanoid-robot-control Description: Figure's Helix 02 upgrades humanoid control by using a single neural network to walk, balance, and manipulate objects autonomously. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Discover the engineering revolution transforming modern defense with Strength, Stealth, Speed: The Very Fast Future of Advanced Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Future of Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Helix 02 links vision, touch, and proprioception directly to all actuators through a single unified visuomotor neural network. Helix, the AI brain powering Figure’s humanoid robots, has been upgraded to its most advanced full-body control system to date.Unlike earlier models limited to upper-body tasks, Helix 02 uses a single neural network to control walking, manipulation, and balance together, directly from raw sensor data. In a key demonstration, the humanoid autonomously unloaded and reloaded a dishwasher across an entire kitchen without resets or human input. According to the Figure, the system replaces complex hand-coded control with learned, human-like motion, opening new levels of dexterity. In February 2025, the California-based firm unveiled Helix, a generalist Vision-Language-Action (VLA) model that combines perception, language, and control to advance robotics. For decades, loco-manipulation — the ability of a robot to move and manipulate objects as a single continuous behavior — has remained one of robotics’ most difficult challenges. Walking and manipulation work well in isolation, but combining them introduces constant coupling: lifting affects balance, stepping changes reach, and arms and legs continuously constrain one another. While humanoid robots have shown impressive short, scripted feats such as dancing or jumping, most lack true adaptability. Their motions are often planned offline and break down when real-world conditions change. Traditional robotics has addressed this by separating locomotion and manipulation into distinct controllers linked by state machines, resulting in slow, brittle, and unnatural behavior. True autonomy demands a fundamentally different approach — a unified system that perceives, decides, and acts with the entire body at once. This is the motivation behind Helix 02, a unified whole-body loco-manipulation VLA system. Helix 02 introduces System 0, a new foundation layer added to Figure’s existing System 1 and System 2 hierarchy. System 2 handles high-level reasoning and language, System 1 translates perception into full-body motion at high frequency, and System 0 executes human-like balance and coordination at kilohertz rates. According to the Figure, trained on over 1,000 hours of human motion data and large-scale simulation, System 0 replaces hand-engineered control with a learned prior for stable, natural movement. Together, the three systems enable continuous, adaptive whole-body autonomy — allowing humanoid robots to walk, carry, reach, and recover in real time. Figure claims Helix 02 demonstrates a major step forward in humanoid autonomy by performing continuous, multi-minute tasks that require tight integration of locomotion, dexterity, and sensing. In fully autonomous evaluations, the system completes extended locomotion and manipulation behaviors without teleoperation or resets. A flagship demonstration shows Helix 02 loading and unloading a dishwasher across a full-sized kitchen during a four-minute, end-to-end task — the most complex autonomous manipulation sequence shown to date and the first long-horizon “pixels-to-whole-body” control on a humanoid robot. The task highlights several capabilities: walking while maintaining delicate grasps, using the entire body to interact with the environment, and coordinating both arms throughout complex object transfers and placement. The same neural network controls motions ranging from millimeter-scale finger movements to room-scale locomotion, sequencing more than 60 actions with implicit error recovery over minutes of execution. Helix 02 also advances dexterous manipulation through tactile sensing and palm-mounted cameras. In autonomous tests, the robot unscrews bottle caps, extracts individual pills from organizers despite occlusion, dispenses precise syringe volumes under variable resistance, and selects small metal parts from cluttered containers. According to the robotic firm, these results, taken together, show how Helix 02 combines full-body control, touch, and in-hand vision to achieve continuous, adaptive autonomy across complex, real-world tasks. “The results are early – but they already show what continuous, whole-body autonomy makes possible. A 4-minute autonomous task with 61 fluidly executed loco-manipulation actions, dexterous behaviors enabled by tactile sensing and palm cameras, and whole-body coordination that uses hips and feet alongside hands and arms,” said Figure, in a statement. Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Images (10): |
|||||
| Figure 03 in diretta: robot umanoidi impacchettano per ore, tra … | https://www.phonetoday.it/figure-03-in-… | 8 | Jul 23, 2026 16:01 | active | |
Figure 03 in diretta: robot umanoidi impacchettano per ore, tra record e polemicheDescription: La startup di robotica Figure AI ha avviato una diretta streaming che dura ormai da quasi una settimana, mostrando i suoi robot umanoidi intenti a posizionare migliaia di pacchi su un nastro trasportatore. L’evento, che ha incluso una sfida tra un robot e uno stagista umano, è diventato virale tra g Content:
L'informazione passa anche per lo smartphone La startup di robotica Figure AI ha avviato una diretta streaming che dura ormai da quasi una settimana, mostrando i suoi robot umanoidi intenti a posizionare migliaia di pacchi su un nastro trasportatore. L’evento, che ha incluso una sfida tra un robot e uno stagista umano, è diventato virale tra gli appassionati di tecnologia, ma solleva interrogativi sulla reale portata delle capacità robotiche dimostrate. La trasmissione, iniziata il 13 maggio, rappresenta un ambizioso test di resistenza per i nuovi modelli Figure 03, ma gli esperti invitano alla cautela nel valutare le prestazioni in un ambiente controllato. L’iniziativa di Figure AI è partita con l’obiettivo dichiarato di far operare i robot per otto ore consecutive in completa autonomia. L’amministratore delegato Brett Adcock aveva inizialmente ridimensionato le aspettative, ricordando che un precedente test era durato soltanto un’ora. “Alte probabilità che qualcosa si rompa”, aveva scritto su X, mostrando consapevolezza delle difficoltà tecniche. Tuttavia, la diretta ha superato ogni previsione, trasformandosi in un fenomeno di massa. I robot, ribattezzati dagli utenti di YouTube con nomi affettuosi, hanno spinto l’azienda a lanciare rapidamente una linea di merchandising dedicato. Su X, alcuni commentatori hanno paragonato l’evento alla presentazione del primo iPhone, definendolo “la più grande dimostrazione di prodotto dai tempi di Steve Jobs”.Il compito affidato ai robot è apparentemente semplice: ispezionare i codici a barre su pacchi di varie dimensioni, da scatole di cartone a buste imbottite, e depositarli su un nastro trasportatore con il codice rivolto verso il basso. La sfida, però, risiede nella ripetitività e nella precisione richiesta per un periodo prolungato. Per rendere la dimostrazione più spettacolare, l’azienda ha organizzato una gara tra un robot e uno stagista umano, vinta dalla macchina in termini di velocità e resistenza. L’episodio ha acceso il dibattito sull’impatto dell’automazione sul lavoro umano, tema centrale nel settore della robotica. Il cuore del sistema è il network neurale Helix 02, sviluppato da Figure per garantire il controllo completo del corpo e una “autonomia a lungo orizzonte”. Secondo il sito ufficiale, il controller dell’intero corpo è stato addestrato su oltre mille ore di dati di movimento umano e attraverso simulazioni in più di 200mila ambienti paralleli. Questo approccio permette ai robot di adattarsi a variazioni impreviste, come pacchi posizionati in modo erratico o leggere variazioni nella superficie del nastro. La diretta streaming, visibile a tutti, funge da prova pubblica dell’affidabilità del sistema, un elemento cruciale per attrarre investitori e potenziali clienti nel settore logistico.Tuttavia, è bene ricordare che anche le demo robotiche più impressionanti rappresentano finestre limitate per comprendere le reali capacità nel mondo reale. L’ambiente controllato dello studio, l’assenza di fattori esterni come polvere, vibrazioni o variazioni termiche, e la ripetizione dello stesso compito per giorni, non equivalgono a un impiego in un magazzino reale. Figure stessa non ha fornito dati precisi sul tasso di errore o sugli interventi di manutenzione necessari durante la diretta, elementi fondamentali per una valutazione oggettiva. L’iniziativa di Figure si inserisce in un trend più ampio di automazione della logistica, dove aziende come Amazon, DHL e FedEx stanno già testando robot per la movimentazione dei pacchi. L’uso di robot umanoidi, in particolare, promette di colmare il divario tra macchine specializzate e la flessibilità del lavoro umano. A differenza dei bracci robotici fissi, i robot come Figure 03 possono spostarsi, adattarsi a diverse altezze e gestire oggetti di forme variabili, riducendo la necessità di riconfigurare le linee di produzione.Nonostante l’entusiasmo, permangono dubbi sulla scalabilità e sui costi. I robot umanoidi sono ancora estremamente costosi da produrre e mantenere, e la loro autonomia è limitata a compiti specifici. La dimostrazione di Figure, per quanto impressionante, non affronta questioni come la durata della batteria, la capacità di operare in spazi ristretti o la gestione di guasti improvvisi. Inoltre, l’assenza di interazione umana durante la diretta solleva domande sulla sicurezza in ambienti con personale umano, un requisito normativo non trascurabile. La community tech ha accolto la diretta con entusiasmo, ma non sono mancate voci critiche. Alcuni ingegneri hanno sottolineato che il compito di posizionare pacchi su un nastro è stato scelto proprio per la sua semplicità, e che la vera sfida sarà integrare questi robot in catene logistiche complesse. Altri hanno evidenziato il rischio di creare aspettative irrealistiche, paragonando la situazione alla bolla delle criptovalute o alle promesse non mantenute della guida autonoma.Figure AI, dal canto suo, ha annunciato che la diretta continuerà fino a quando i robot non mostreranno segni di cedimento, trasformando l’evento in un test di resistenza senza precedenti. L’azienda ha già dichiarato di voler utilizzare i dati raccolti per migliorare il sistema Helix 02 e preparare il lancio commerciale dei Figure 03 entro la fine dell’anno. Se il progetto avrà successo, potrebbe segnare un punto di svolta per l’adozione dei robot umanoidi nell’industria, ma la strada è ancora lunga e piena di ostacoli tecnici ed economici.La diretta di Figure AI rappresenta un passo avanti nella dimostrazione pubblica delle capacità robotiche, ma non deve far dimenticare che la vera innovazione si misura nella capacità di operare in condizioni reali, non in uno show controllato. Mentre gli appassionati continuano a guardare i robot impacchettare senza sosta, il settore attende con interesse i prossimi sviluppi, consapevole che il confine tra spettacolo e progresso tecnologico è più sottile di quanto sembri. Sono un ingegnere informatico con una passione innata per il mondo degli smartphone e della tecnologia. Da anni esploro e condivido le ultime novità, analizzando prodotti, tendenze e innovazioni per offrire contenuti chiari e approfonditi. La mia missione è aiutarti a scegliere i migliori strumenti tecnologici per migliorare la tua vita quotidiana. Che si tratti di smartphone, gadget o consigli tech, troverai qui una guida affidabile e aggiornata. Seguimi per restare sempre connesso al futuro della tecnologia! © 2025 PhoneToday.it. Tutti i diritti riservati. Partita IVA: 03874940780
Images (8): 



|
|||||
| The 4 Layers Of Brain Behind One Of Europe’s Leading … | https://www.forbes.com/sites/johnkoetsi… | 6 | Jul 23, 2026 00:01 | active | |
The 4 Layers Of Brain Behind One Of Europe’s Leading Humanoid RobotsDescription: I spent an hour with Humanoid's Sotirios Stasinopoulos in the company's UK headquarters. In spite of huge competition, their humanoid robot strategy looks impressive. Content:
ByJohn Koetsier, Senior Contributor. Humanoid AI, a UK-based firm, is emerging as a significant European player in the humanoid robot market. Their HMND 01 robot primarily features a wheeled design, prioritizing industrial applications due to greater energy efficiency, stability, and easier CE certification compared to bipedal models. The company employs a four-layer AI architecture, from fleet coordination to whole-body control, leveraging vision-language models for deterministic task execution. Humanoid AI focuses on deploying flexible robot fleets capable of diverse tasks, aiming for performance exceeding human speed through reinforcement learning. Despite less capital than US competitors, strategic partnerships with Bosch and Schaeffler, and a commercial-first approach, position them for rapid growth and European manufacturing. They are expected to secure more funding soon. HMND 01’s four-layer brain starts at layer zero, just like European elevators. That’s oddly fitting, given that its maker, Humanoid AI, is based in a sleek tower high above downtown London. It’s not the sort of place you might expect to find the grease and gears and rigging of a contemporary robotics startup, but it’s here that Humanoid is quietly assembling one of Europe's most credible answers to the humanoid robot race. While American rivals like Apptronik, Figure and 1X plus a wave of high-volume Chinese manufacturers like Agibot, Unitree and UBtech dominate the headlines, Europe has been building its own humanoid contenders. That includes Humanoid in the UK, Neura Robotics in Germany and a handful of others like Oversonic Robotics in Italy. Typically – though not with Neura Robotics – these European startups have far less capital than their U.S. counterparts … and therefore more urgency about shipping. I spent an hour with Humanoid’s chief product officer Sotirios Stasinopoulos walking around the company’s UK HQ, talking about Humanoid’s strategy and timing. Obviously Greek in origin, Stasinopoulos spent over a decade in China working for top robotics companies like UBtech as well as starting several companies of his own. That’s a great real-world education for building humanoid robots on a budget and a timeline, and he’s put his experience to good use quickly. Humanoid was founded in 2024 by Artem Sokolov, who scaled the Sokolov jewelry business into a billion-dollar manufacturing firm. Still just 130 people, Humanoid has already signed deployment deals with Schaeffler, Bosch and Siemens and launched both bipedal and wheeled humanoid prototypes, all without raising the billion-plus dollars of venture capital its best-known competitors enjoy. The most visible bet Humanoid has made is one you can see the moment you walk the floor: the flagship humanoid robot it’s focusing most of its development effort on rolls rather than walking. The company has two platforms, a wheeled mobile manipulator called the HMND 01, and a bipedal robot. But for now, roughly 90% of its engineering effort goes into the wheeled version, for reasons Stasinopoulos laid out. "More than 85 or 90% of the use cases can be covered by a wheel-based platform," he told me, echoing an assessment I’ve heard from multiple robotics companies. Any wheeled platform is more energy efficient because it doesn’t burn power just standing upright, is more stable thanks to a very low center of gravity and therefore has a bigger working envelope. "It can go from zero up to 1.5 meters fully extended, 1.5 meters away from the robot," he said, talking about HMND 01’s hands. The current Alpha version lifts 15 kilograms (33 pounds); the next will handle 20 (45 pounds). But the truly decisive form factor decision is regulatory. Industrial customers typically need CE certification, and that’s a lot easier for a wheeled platform than bipedal. "There’s no ISO at this stage that can cover bipedal technology for industrial frameworks, because at any time you may fall," Stasinopoulos says. "It means a lot of redundancy. The certification is still not mature. We’re in these committees … we believe maybe late next year or early '28 you might have something." The wheeled platform, by contrast, can be certified under existing frameworks by borrowing from two of them at once: the autonomous mobile robot (AMR) standard and the collaborative-robot, or cobot, industrial framework. "If we wanted to have a product with CE certification by next year, this was the way to go," he said. Humanoid is targeting a fully certified product by late 2027. The biped is still around, though. But it has a different target market. "We are retargeting this to a more service and household application, but as a mid- to long-term strategy," Stasinopoulos said. Bipedal technology, he added, still isn’t robust enough for the 20-hours-a-day industrial duty cycle Humanoid designs around, and the home safety case isn’t yet completely solved. "You definitely don't want a big heavy metal thing falling on a pet or a baby." Humanoid’s hardware philosophy is pragmatic. So is its software architecture: organizing robotic intelligence into four layers, numbered from three down to zero. At the top sits System 3, an agentic fleet coordinator that ingests tasks from a customer’s warehouse management or ERP system and distributes them across robots based on their location, battery status and — because the end effectors are modular — their current capabilities. System 3 is reminiscent of Boston Dynamics’ fleet management system, which also talks to ERP software to coordinate robots and achieve tasks. (At some point Humanoid’s end effectors should be hot-swappable, so a robot could theoretically switch out fully 20+ degree of freedom robotic hands used for sensitive assembly, perhaps, to simpler and more robust grippers for logistics and shipping department duties, perhaps.) Below it, System 2 is a reasoning layer built on off-the-shelf vision-language models like Google's Gemini, which breaks each task into a deterministic, checkable workflow. System 1 is Humanoid's proprietary vision-language-action model, which executes discrete actions like picking an object off a shelf. And System 0 is the whole-body controller that turns those commands into actual motion. I asked if that flow, essentially, is how you take probabilistic technology like an LLM and use it as part of a physical AI software stack to power tasks that are deterministic. "Exactly," Stasinopoulos said. "You ask the agent or the VLM to create this workflow for you, but you need to check it and make sure it's what you want to achieve." The philosophy is fleets, not units. "We're not trying to deploy single robots for single applications," he said. "If you only want a robot to do one thing, you might as well get an old-school automation solution." The goal, instead, is a workforce as flexible as humans: robots that stock shelves in the morning, feed machines in the afternoon and reorganize inventory overnight. Speed is always a question when you’re looking at robotic – and especially humanoid robotic – solutions to labor. How fast are they compared to our most common reference point: a human? Humanoid says its robots are now performing core tasks at roughly 80% of human speed and success rate on some tasks, up from around 60%, and it expects to approach — and eventually exceed — 100%. That’s already pretty impressive, given the speed I’ve seen on humanoids so far. That last claim though – exceeding human speed – rests on reinforcement learning, not teleoperation-based human-gathered data. "If we're only to use imitation learning, based on the data we collect with humans, then human performance is the limit," Stasinopoulos said. "Reinforcement learning does not have this limit." The company now leaves robots working overnight, with System 2 automatically judging good and bad executions and feeding the wins back into a shared base model. "One robot will do something better, System 2 will say this is a good execution, retrain the base model, and then all the robots get the improved model," he said. "The progress is exponential." That’s impressive, but not shocking given that the company has so quickly executed on launching significant humanoids. Two things explain the pace, he argued. The first is commercial focus. "We don’t develop technology and see how it can be used," he said. From his arrival in September 2024, the company chased big customers armed with little more than a presentation, then designed to their requirements. The second is what he called “second-mover advantage:” the team includes more than 50 veterans from Boston Dynamics, Sanctuary AI, 1X and other top robotics and tech companies. "We’re making use of all the knowledge and all the mishaps that other companies had to pay millions or billions of dollars to learn," Stasinopoulos told me. There’s a reason Stasinopoulos moved back to Europe from China: robotics isn’t just tech. It’s also geopolitics: nations and alliances with top-notch robots and humanoid robots will have labor and productivity advantages others will struggle to compete with. And, in an era of supply chain uncertainty when it comes to magnets, rare earths, key technologies like actuators and more, everything here is political, too. So the supply chain is also a strategic question, Stasinopoulos say, and Humanoid will manufacture in Europe for European customers as well as pursuing a "China plus one" approach in its supply chain to avoid being locked in if geopolitics turn. The most critical components come through strategic partnerships: Humanoid’s actuators are co-designed with Schaeffler, while compute runs on Nvidia. "For the most crucial parts of the solution, we'll work with strategics," he said. "For the non-so-crucial components, we'll keep an open mind." Actuators are key here: they’re commonly 50% of the cost and complexity of the robot, and efficiency, power, thermal management and longevity are all critical. That’s why the European partnerships Humanoid has forged with Bosch for manufacturing and Schaeffler for actuators are so important. Those strategic deals turn suppliers into partners and customers, with Schaeffler signing up for at least 1,000 of Humanoid’s robots, and Humanoid getting access to enough production capacity to build 100,000 humanoids by 2031. There’s a lot you can do on ingenuity and hard work. But a little extra capital wouldn’t hurt either, and it sounds like that could be coming soon. Humanoid has raised $74 million in funding so far, but local rivals like Neura Robotics in Germany have raised over $1 billion. To compete, Humanoid has to boost its war chest, and while Stasinopoulos couldn’t comment specifically, that seems to be in the cards fairly soon. That would only strengthen Humanoid’s position as competition intensifies. Figure, Apptronik and other U.S. rivals have all raised billion-dollar war chests, and matching that scale will require significantly more capital.
Images (6): 




|
|||||
| ABB Robotics se alía con Nvidia | https://www.lavanguardia.com/dinero/202… | 5 | Jul 22, 2026 00:01 | active | |
ABB Robotics se alía con NvidiaURL: https://www.lavanguardia.com/dinero/20260712/11589415/abb-robotics-aliacon-nvidia.html Description: El centro de I+D de Sant Quirze del Vallès de la compañía diseña los nuevos robots con gemelos digitales Content:
Robot industrial diseñado por ABB Robotics en Sant Quirze del Vallès ABB Robotics Francesc Bracero Barcelona Tiempos de cambio a ritmo de IA. ABB Robotics ha iniciado una transición para operar como empresa independiente, separándose del grupo ABB, una decisión que responde a la necesidad de adaptarse al ritmo acelerado de la innovación en campos como la inteligencia artificial y el software, que evolucionan mucho más rápido que el sector industrial tradicional. En ese contexto, el grupo SoftBank ha decidido adquirir ABB Robotics para integrarla en su ecosistema centrado en la IA, los centros de datos y la llamada IA física . Esta operación está prevista que se cierre a lo largo del verano. El centro de ABB de Sant Quirze del Vallès es un pilar estratégico para toda la empresa a nivel mundial. Alberga un departamento especializado en el desarrollo de la tecnología de visión del grupo y otro dedicado a las herramientas digitales y al software de simulación. Esta concentración de talento, con profesionales de 47 nacionalidades, posiciona al centro como un motor de innovación con la inteligencia artificial como valor añadido. El futuro de ABB Robotics se está configurando mediante alianzas estratégicas clave. La inminente integración en el grupo SoftBank permitirá a la empresa utilizar OpenAI como motor de inteligencia artificial de nivel industrial, lo que capacitará a los robots para comprender el mundo físico, en lugar de limitarse a procesar tareas. Lee también Norberto Gallego La integración de la plataforma Omniverse de Nvidia con el software RobotStudio de ABB ha dado lugar a RobotStudio Hyper Reality. Esta herramienta crea un gemelo digital de cada robot, adaptado a la necesidad de cada cliente con una fidelidad del 99% respecto a la realidad, ya que no solo simula el robot, sino también el entorno físico (con variables muchas veces imprevistas, como luz, temperatura o dilatación de los materiales). Esta tecnología promete reducir los plazos de entrega en un 50% y los costes de programación en un 40%. Sergio Martín, director general de ABB Robotics para España y Portugal, señala que “Nvidia es reconocida hoy en día por su enorme capacidad computacional. Cuentan con una plataforma que denominan Omniverse en la que recogen toda la información sobre el entorno mediante modelos de simulación, lo que les ha permitido identificar cómo funciona el entorno y cómo funciona el mundo y la física”. Martín indica que esta integración “significa que lo que transfiramos del mundo virtual al mundo real tendrá una correlación casi exacta gracias a esta colaboración con Nvidia”. En Sant Quirze, ABB Robotics tiene su Centro de Innovación para Clientes. “La idea es recibir a los clientes y escuchar sus retos –describe Sergio Martín–. A continuación, contamos con diferentes puestos de trabajo y lo que hacemos es seleccionar cuál de los centros de soluciones globales puede ofrecer la solución, qué tecnología se aplica y llevar a cabo una prueba de concepto con ellos. ¿Es viable o no? Así que esto resuelve muchos de los problemas de barrera de entrada”. La idea es que cualquier cliente, por pequeño que sea su negocio, pueda encontrar una solución robótica que amplíe sus horizontes de empresa. “Que sepan que la barrera de entrada no es tan alta, que podemos apoyarles, ya sea nosotros mismos o con integradores de ingeniería que colaboran con nosotros, porque en el mundo actual no se puede ir por libre en todo; hay que colaborar con otras empresas, con otras tecnologías”, señala Martín. Además, ABB Robotics ha firmado un acuerdo con Psyonic para incorporar su tecnología de prótesis robóticas Ability Hand en las manos de los robots, transfiriendo datos reales sobre la manipulación humana para dotarlas de una destreza y agilidad similares. Lee también Lalo Agustina La IA y las alianzas globales, como la de Nvidia y su integración en el grupo SoftBank, dota a ABB Robotics de nuevos horizontes: “Siempre hemos crecido con el sector, pero ahora somos capaces de decir hacia dónde queremos crecer. Y el hecho de contar con este valor añadido aquí en Catalunya, en España, en las diferentes unidades, nos convierte, de verdad, en líderes, líderes a la hora de trabajar en otros países”, sentencia Martín. El diseño de robots mediante gemelos digitales promete reducir los plazos de entrega a la mitad Los datos muestran que los países con un índice de robotización más elevado, como Corea del Sur (con 2.300 robots por cada 10.000 empleados), presentan tasas de desempleo más bajas. España, con 170 robots por cada 10.000 empleados, ocupa el decimotercer puesto a nivel mundial, lo que indica que hay un amplio margen de crecimiento para mejorar la flexibilidad, reducir los costes y aumentar la competitividad industrial. La robótica colaborativa y la inteligencia artificial están desempeñando un papel clave en la democratización de esta tecnología, haciéndola accesible a las pequeñas y medianas empresas (pymes). Estas soluciones ofrecen una inversión más asequible y un retorno de la inversión (ROI) de aproximadamente un año, lo que rompe las barreras económicas tradicionales. Esta expansión se refleja en el uso de robots en sectores no industriales, con ejemplos en aplicaciones como la preparación de cócteles en cruceros, un servicio de helados en Italia, la personalización de perfumes o la automatización de tareas repetitivas en laboratorios médicos para agilizar los diagnósticos de enfermedades. Francesc Bracero Licenciado en Periodismo por la UAB. Redactor de La Vanguardia desde 1996. Ha cubierto las áreas de Política, Deportes y Comunicación. Especializado en tecnología. Autor del libro 'Bicicletas para la mente' (Península) © La Vanguardia Ediciones, SLU Todos los derechos reservados.
Images (5): 




|
|||||
| Производитель гуманоидных роботов Digit выходит на биржу с оценкой $2,5 … | https://pcnews.ru/news/proizvoditel_gum… | 5 | Jul 21, 2026 16:00 | active | |
Производитель гуманоидных роботов Digit выходит на биржу с оценкой $2,5 млрд - PCNEWS.RUDescription: Все компьютерные новости на PCNews.ru. Вся новая информация, о компьютерах и информационных технологиях. Синдикация новостей, статей, пресс-релизов со всех сайтов компьютерной (ИТ или IT) тематики. Content:
[unable to retrieve full-text content] Американская компания Agility Robotics, разработчик гуманоидного робота Digit, договорилась о выходе на биржу через слияние со специальной компанией Churchill Capital Corp XI. Сделка оценивает Agility Robotics в $2,5 млрд до привлечения новых инвестиций и должна принести объединённой компании более $620 млн средств. В рамках сделки около $200 млн будет привлечено через частное размещение акций (PIPE), которое возглавит Foxconn совместно с другими существующими и новыми институциональными инвесторами. После завершения объединения компания сохранит название Agility и будет торговаться на одной из крупных североамериканских бирж под тикером AGLT. Agility Robotics из американского штата Орегон разрабатывает робота Digit, предназначенного для работы на производстве, в распределительных центрах и логистике. Компания заявляет, что робот уже используется в коммерческих условиях у клиентов, среди которых Schaeffler, GXO, Toyota Motor Manufacturing Canada и Mercado Libre. По данным Agility, Digit уже отработал более 65 000 часов на девяти объектах заказчиков. Компания также сообщила о более чем $300 млн заказах на следующее поколение робота Digit v5, которые зависят от выполнения договорных условий. Потенциальный список клиентов включает более 30 компаний. Фото: Agility Robotics Digit v5 создаётся как гуманоидный робот с искусственным интеллектом, способный безопасно работать рядом с людьми в промышленных помещениях. Agility разрабатывает для него собственную платформу физического ИИ, которая объединяет восприятие окружающей среды, принятие решений и управление движением на основе данных, собранных во время коммерческой эксплуатации роботов. Генеральный директор Agility Robotics Пегги Джонсон заявила, что компания сосредоточена на расширении поставок, увеличении числа внедрений и развитии технологий робототехники, систем безопасности и корпоративного программного обеспечения. По оценке руководства компании, рынок применения гуманоидных роботов в производстве, распределении и логистике США может достигать примерно $1 трлн. Сооснователь Agility Robotics и главный специалист по робототехнике Джонатан Хёрст отметил, что ключевым условием масштабного внедрения гуманоидных роботов является совместная безопасность — возможность работать в одних пространствах с людьми без необходимости перестраивать существующую инфраструктуру. Компания сотрудничает с Google DeepMind и Nvidia. Последняя недавно выбрала Agility Robotics первым партнёром для Nvidia Halos — платформы безопасности для физических систем искусственного интеллекта и гуманоидных роботов. Для массового производства Agility создала завод RoboFab, рассчитанный на выпуск до 10 000 гуманоидных роботов в год, а также облачную платформу Agility Arc для управления парком роботов и их развёртывания. Компания заявляет, что около 75% компонентов Digit производятся в США. Советы директоров Agility Robotics и Churchill Capital Corp XI единогласно одобрили сделку. Её закрытие ожидается в этом году после получения одобрения акционеров, прохождения регуляторных процедур и выполнения стандартных условий завершения сделки. © iXBT
Images (5): 

|
|||||
| Agility Robotics plants its flag in Tesla's backyard | TechCrunch | https://techcrunch.com/2026/07/17/agili… | 6 | Jul 21, 2026 16:00 | active | |
Agility Robotics plants its flag in Tesla's backyard | TechCrunchURL: https://techcrunch.com/2026/07/17/agility-robotics-plants-its-flag-in-teslas-backyard/ Description: Agility is opening a new training center for its Digit robots in Fremont, California. Content:
Latest AI Amazon Apps Biotech & Health Climate Cloud Computing Commerce Crypto Enterprise EVs Fintech Fundraising Gadgets Gaming Google Government & Policy Hardware Instagram Layoffs Media & Entertainment Meta Microsoft Privacy Robotics Security Social Space Startups TikTok Transportation Venture Staff Events Startup Battlefield StrictlyVC Newsletters Podcasts Videos Partner Content TechCrunch Brand Studio Crunchboard Contact Us Agility Robotics is opening a 60,000-square-foot facility to train its humanoid robots in Fremont, California, just up the highway from the factory where Tesla is expected to start manufacturing its Optimus robots this year. Tesla has increasingly bet on Optimus. Elon Musk recently said he expects it to be “the biggest product ever” once it’s “useful outside of Tesla sometime next year.” While Agility doesn’t have Tesla’s capital, it does have a robot, Digit, that is already useful in the real world. The robot is already generating revenue, carrying totes and bins in manufacturing and warehouse settings for customers like Amazon, GXO, Schaeffler, and Toyota Motor Manufacturing Canada. The company says it has secured $300 million in contract orders for its robots. “It’s great to have [Tesla] in the same area as us, because really, for a long time Agility was out there alone, and it’s good to have others in the humanoid space,” CEO Peggy Johnson told TechCrunch. “We have commercialized. We now know what it takes to walk into these facilities and meet their safety bars, their regulatory bars, compliance, plug into their IT infrastructure, plug into their warehouse management system.” Agility hasn’t disclosed how many Digits that it has built or deployed, but outside observers estimate that dozens have worked in pilot or revenue-generating deployments. The company has said, for example, that Digits have moved 100,000 totes at a GXO logistics facility. Johnson is currently leading Agility through a reverse-merger that is expected to make it the first pure-play humanoid robot company on the public markets later this year. Founded in 2015 by a group of researchers who developed new techniques that allow robots to safely walk on two legs, Agility is trying to capitalize on its lead over a newer generation of AI-inspired robotic startups like Figure, 1X, the Bot Company, or Sunday Robotics. While the arrival of transformer-based neural networks that helped give rise to LLMs also promises major advancements in robotic behavior, Agility is taking a practical approach to autonomy. “When you think about self-driving cars, you know, as a non-humanoid example, you really don’t want the anti-lock brake controller under AI control,” Agility co-founder and chairman Damion Shelton told TechCrunch. “The analog with humanoids is all the safety stuff needs to go through a path that’s not generative AI, right? You don’t want to get creative with your safety stack.” What AI does do, however, is deliver on the promise of scale. “One of the first times [Bruce Leak, the Quicktime inventor who serves on Agility’s board] asked us how we were going to go about coding applications for the robot, we didn’t really have a good answer,” Shelton said. “The number of things you can imagine a robot doing is far larger than the number of engineers who can program robots. And generative AI answers that question definitively.” The new facility is designed to accelerate the company’s robotic deployments. Johnson says more than 30 customers are in talks with the company about deploying Digit, and the new facility will be where the six-foot-tall robot learns new skills in environments similar to those it will experience in the field. Unlike many of the newer entrants to the humanoid space, Agility isn’t planning to offer in-home humanoid robots anytime soon. It’s a view that jibes with that of most independent robotics experts, who believe today’s most powerful robots aren’t safe enough for consumer use. Digit operates in a human-free space right now, but the version 5, expected to be unveiled this fall, will have the ability to sense humans and won’t need to be kept in a robot-only zone. Co-founder and chief robot officer Jonathan Hurst said there is plenty of work to keep Agility busy in manufacturing and logistics alone. “Let’s start with the bins and the totes, and then let’s do the picking and the kitting,” Hurst told TechCrunch. “And then let’s like start working on cardboard, which is really hard, and loading and unloading tractor trailers and things like that. Okay, now we’re at 100 million robots, you know? A trillion-dollar company.” Topics When you purchase through links in our articles, we may earn a small commission. This doesn’t affect our editorial independence. Senior Reporter Scale faster. Grow your portfolio. Gain practical expertise. No matter your goal, Disrupt can empower you.Save up to $330 today! Judge pauses $110B Paramount-Warner Bros. merger Apple and Google ordered to purge ‘nudify’ apps from App Stores Coca-Cola suspended production at its Fairlife dairy after a ransomware attack Tesla driver in fatal Texas crash pressed accelerator 100%, NTSB confirms Amid hardware legal battle, OpenAI releases a $230 keyboard for Codex Anthropic, Blackstone bet the next trillion-dollar AI business is implementation, not just models OpenAI’s first hardware device is reportedly a screenless speaker that can move © 2026 TechCrunch Media LLC.
Images (6): 



|
|||||
| Производитель роботов Agility Robotics выходит на биржу с оценкой $2,5 … | https://runet.news/news/72470 | 7 | Jul 21, 2026 16:00 | active | |
Производитель роботов Agility Robotics выходит на биржу с оценкой $2,5 млрд — RunetURL: https://runet.news/news/72470 Content:
Американский разработчик гуманоидных роботов Agility Robotics договорился о выходе на биржу через слияние со специальной компанией Churchill Capital Corp XI. Сделка оценивает компанию в $2,5 млрд и должна принести ей более $620 млн. Об этом сообщает ixbt.com. «Компания сосредоточена на расширении поставок, увеличении числа внедрений и развитии технологий робототехники, систем безопасности и корпоративного программного обеспечения», — заявила генеральный директор Agility Robotics Пегги Джонсон. В рамках сделки около $200 млн привлекут через частное размещение акций, которое возглавит Foxconn. После завершения слияния объединенная компания сохранит название Agility и будет торговаться на бирже под тикером AGLT. Agility Robotics разрабатывает робота Digit для работы на производстве, в распределительных центрах и логистике. Робот уже отработал более 65 000 часов на объектах заказчиков, среди которых Schaeffler, GXO, Toyota и Mercado Libre. Компания сообщила о заказах на сумму более $300 млн на следующее поколение робота Digit v5. Потенциальный список клиентов включает более 30 компаний. По оценке руководства, рынок применения гуманоидных роботов в США может достигать $1 трлн. Для массового производства Agility создала завод RoboFab, рассчитанный на выпуск до 10 000 роботов в год. Компания также сотрудничает с Google DeepMind и Nvidia. Около 75% компонентов Digit производятся в США. Сделку уже одобрили советы директоров Agility Robotics и Churchill Capital Corp XI. Ее закрытие ожидается в этом году после получения одобрения акционеров и регуляторов. Подписывайтесь на наш Telegram-канал, чтобы быть в курсе всех новостей и событий Рунета.
Images (7): 

|
|||||
| Agility Robotics Rejects AI and Robotics Talent 'Bidding Wars' - … | https://www.businessinsider.com/agility… | 10 | Jul 21, 2026 16:00 | active | |
Agility Robotics Rejects AI and Robotics Talent 'Bidding Wars' - Business InsiderDescription: Agility Robotics has expanded with a new Silicon Valley hub. The startup is avoiding AI talent wars and focusing on culture over high salaries. Content:
Agility Robotics has a new hub in Silicon Valley, where it will be luring more world-class engineers to join the humanoid maker. Just don't expect the startup to get into a spending war for talent. Jonathan Hurst, Agility's cofounder and chief robot officer, told Business Insider his company has no interest in joining the escalating competition over pay packages for top AI and robotics talent. "One of the things that's been weird recently has been kind of the bidding wars for some of this really rare talent," Hurst said. "We're not going to do that because we don't want coin-operated employees." On Thursday, Agility opened a 60,000-square-foot research and training facility in Fremont, where the company expects to house nearly 200 existing and new employees across hardware engineering, AI and machine learning, and customer operations support. The site will serve as a "robot school" to teach Agility's Digit humanoid new skills, Hurst said. The Fremont location, about 15 miles east of Palo Alto, gives Agility a closer proximity to one of the world's deepest pools of technical talent. It also means Agility will be near some of the most well-funded companies competing in the robotics space. On the other side of the road is Meta's own Fremont campus, which houses the company's hardware R&D team, including its robotics outfit. About 10 miles south is Tesla's vast Fremont center, where the company is preparing for Optimus production. And across the Dumbarton Bridge in Palo Alto is a cluster of other robotics companies, including 1X, Mind Robotics, and Serve Robotics. Take a smarter break in your day - and see how far you get. Competition for top AI talent has been fierce, at times leading to eye-popping compensation packages. At Meta, top hires have been offered nine-figure signing bonuses. Other AI leaders at smaller outfits can see between $300,000 and $400,000 in base pay, Business Insider previously reported. Hurst said he has seen candidates offered what Agility believes is a fair, market-rate offer, only for the prospective hire to come back and say they've received double from another company. "We're like, 'Go for it.' That's okay," Hurst said, adding that the startup prefers candidates who fit Agility's culture and mission. To lure top talent, Hurst points to his company's progress: "We're the first to commercially deploy humanoid robots." Agility is one of the few robotics startups in the US with humanoids performing sustained work beyond the confines of a research lab. The company first deployed Digit, a bipedal robot, for commercial operations in 2024. Agility has since deployed the bot across manufacturing, distribution, and logistics operations, accumulating more than 65,000 hours of work. Digit's primary tasks for now have been picking up bins and moving them to another location, Hurst said. "We're doing this in a serious way. The we-are-going-to-build-a-sustainable-growing-company way," Hurst said. "It's not so much a tell-a-grand-story-and-hope-we-can-fill-in-the-gaps way." Agility plans to go public via a SPAC later this year. The startup said in an SEC filing that it has more than $300 million in conditional multiyear orders for its next-generation Digit V5. Jump to Every time publishes a story, you’ll get an alert straight to your inbox! Look out for an alert in your inbox the next time publishes a story! Every time a new story is published, you’ll get an alert straight to your inbox! Look out for an alert in your inbox the next time a new story is published! By clicking “Sign up”, you agree to receive emails from Business Insider. In addition, you accept Insider’s Terms of Service and Privacy Policy.
Images (10): 
|
|||||
| Meet the Floating Robot Companion Designed for Safe, Friendly Human … | https://www.cnet.com/tech/floating-robo… | 7 | Jul 21, 2026 08:01 | active | |
Meet the Floating Robot Companion Designed for Safe, Friendly Human Interaction - CNETURL: https://www.cnet.com/tech/floating-robots-safe-friendly-human-interaction/ Description: Robotics researchers are trying to prove that lighter-than-air robots could excel at emotional connection. Content:
Our expert, award-winning staff selects the products we cover and rigorously researches and tests our top picks. If you buy through our links, we may earn a commission. Tech Robotics researchers are trying to prove that lighter-than-air robots could excel at emotional connection. Senior Video Producer Senior Video Producer July 12, 2026, 12:01 pm ET Floating robots can glide through the air without the loud whirr of propeller-powered drones. Inspired by animated flying friends like Tinker Bell, Mew and Studio Ghibli’s Soot Sprites, a team of researchers set out to show what a floating robotic companion might be good for and how humans could interact with it. Led by Mingyang Xu from Keio University in Japan, with participation from other institutions like the MIT Media Lab, the team recently released a demo video. The video shows a lighter-than-air robot with fins gliding through the air, making it look like a white, floating whale. It hovers without the loud whirr that accompanies most drones. Thanks to its light construction, soft body and lack of pinch points, it can interact with humans with little risk of injury. Robotics companies often struggle to create machines that feel both safe to interact with and emotionally engaging, because rigid designs and inorganic appearances can trigger the unsettling effect known as the uncanny valley — the viscerally creepy feeling people get when something looks almost human, but not quite right. Soft floating robots may have advantages over other designs when it comes to emotional connection and safe human-robot interaction. Floating robots may circumvent that unease by replacing robotic facial expressions with gentle, full-body movements, and enabling safer human-robot interaction through a soft, pliable form. The video demonstrated soft floating robots serving as a dance partner, study buddy, alarm clock, reminder and source of entertainment. To see the robot in action, check out the video in this article. © 2026 CNET, a Ziff Davis company. All rights reserved.
Images (7): 


|
|||||
| Video Humanoid robots perform surgery - ABC News | https://abcnews.com/video/134643679/ | 10 | Jul 21, 2026 00:00 | active | |
Video Humanoid robots perform surgery - ABC NewsURL: https://abcnews.com/video/134643679/ Description: For the first time, surgeons at UC San Diego have operated using humanoid robots, removing gallbladders in two procedures on pigs, a key step before any human trials. Content: Images (10): 

|
|||||
| Humanoid Robots Perform First-Ever Successful Surgery | https://propakistani.pk/2026/07/10/huma… | 10 | Jul 21, 2026 00:00 | active | |
Humanoid Robots Perform First-Ever Successful SurgeryURL: https://propakistani.pk/2026/07/10/humanoid-robots-perform-first-ever-successful-surgery/ Description: Researchers at the University of California San Diego have used teleoperated humanoid robots to complete two surgeries in a preclinical trial, marking a Content:
Researchers at the University of California San Diego have used teleoperated humanoid robots to complete two surgeries in a preclinical trial, marking a major step toward robotic assistance in the operating room. In one procedure, a human-robot team completed a gallbladder removal with a humanoid robot working alongside a human surgeon. In another, two humanoid robots worked together in a robot-robot team to perform a second successful surgery. Both operations took place on large non-primate mammals. The researchers said the experiment shows that humanoid robots could first assist surgeons and later carry out procedures under teleoperation. They said the technology could help address surgeon shortages, reduce wait times, and improve access to care in remote and under-resourced areas. Unlike specialized surgical robots, humanoid robots can move freely, take up less space, and perform a wider range of tasks. The robots used in the study, nicknamed Surgie, stand about five feet tall and weigh about 60 pounds. Researchers said that makes them easier to deploy in hospitals, rural settings, disaster zones, and other challenging environments. Study authors said the robots still need improvements, especially in calibration and latency, but they believe the technology will advance quickly. They also said humanoid robots could eventually help fetch tools, clean operating rooms, and support surgical teams as autonomous assistants. Get the latest tech news, telecom insights, and product launches wherever you prefer. Add ProPakistani to Preferred Sources and see more of our stories in Google Search and Top Stories. Shares ProPakistani is the premier and most trustworthy resource for all happenings in technology, telecom, business, sports, auto, education, real estate and entertainment news in Pakistan. Whether it's the top trending news, inside scoops or features, interviews, market trends and analysis, product reviews, How to's or tutorials – we cover it all. © 2026 ProPakistani.PK - All rights reserved Join the groups below to get the latest news and updates. Session expired Please log in again. The login page will open in a new tab. After logging in you can close it and return to this page.
Images (10): 
|
|||||
| Fanuc incorpora la tecnología de Google en sus robots e … | https://www.automaticaeinstrumentacion.… | 10 | Jul 20, 2026 16:01 | active | |
Fanuc incorpora la tecnología de Google en sus robots e impulsa el desarrollo de la IA físicaDescription: Supone un avance hacia sistemas robotizados industriales basados en agentes de IA ... Content:
Fanuc ha firmado un acuerdo de colaboración con Google para aumentar las capacidades de sus sistemas robotizados basados en IA a través de la integración de tecnologías de última generación. Esta alianza se enmarca en su impulso de la innovación en automatización industrial mediante el desarrollo de plataformas abiertas y soluciones de IA física . La compañía apuesta desde hace años por tecnologías abiertas que facilitan la implementación de soluciones de IA en los entornos de fabricación. Sus robots son compatibles con ROS (Robot Operating System), la plataforma abierta de referencia para el control robótico, mediante sus controladores open source. Además, ofrecen una amplia compatibilidad con tecnologías ampliamente utilizadas en el desarrollo de sistemas de IA, como el lenguaje de programación Python, interfaces de comunicación de alta velocidad para el control externo de robots y soluciones que permiten una integración sencilla con PLCs industriales. Estas capacidades permiten a los fabricantes desplegar sistemas de IA física de forma rápida y eficiente, combinando la fiabilidad de la gama de robots Fanuc, desde modelos compactos con 3 kg de capacidad de carga, hasta robots de gran tamaño con capacidad para manipular 2,3 toneladas, incluyendo la serie de cobots CRX, con las tecnologías más avanzadas de IA para aplicaciones en entornos industriales reales. Desde la presentación del sistema IA física de Fanuc en la última International Robot Exhibition (IREX) celebrada en diciembre, el interés del mercado ha crecido significativamente. Tras aquella presentación, la compañía ya ha suministrado más de 1.000 robots destinados a aplicaciones relacionadas con IA Física, con una demanda que continúa creciendo. ColaboraciónComo parte de la nueva colaboración, Fanuc ha desarrollado un sistema de IA física para robots industriales que incorpora las últimas innovaciones de Google Cloud, incluyendo Gemini Enterprise, la plataforma de inteligencia artificial generativa para empresas que combina capacidades avanzadas de procesamiento con elevados estándares de seguridad y fiabilidad. La compañía presentó en mayo en el New Product Open House Show, la nueva generación de sistemas de IA física equipados con tecnología Gemini. La demostración mostró un agente de IA desarrollado con Gemini Enterprise, capaz de comprender instrucciones humanas, identificar objetos y operar de forma autónoma robots Fanuc para ejecutar las tareas asignadas. Esta innovación supone un avance hacia sistemas robotizados industriales basados en agentes de IA, permitiendo que robots colaborativos y robots industriales convencionales trabajen conjuntamente dentro de una misma célula de producción, coordinados mediante sencillas instrucciones en lenguaje natural. Soluciones de IA industrialLa colaboración también se extiende a la plataforma empresarial de Intrinsic, compañía del grupo Alphabet especializada en software para robótica. Todos los robots Fanuc, incluida la gama CRX, pasan a contar con soporte completo dentro de esta plataforma, permitiendo a los usuarios crear, probar e implementar aplicaciones robotizadas basadas en IA de forma más rápida y eficiente. En este contexto, la compañía garantiza una compatibilidad total con el entorno de desarrollo Flowstate, desarrollado por Intrinsic. La interoperabilidad con ROS y las capacidades abiertas de los robots Fanuc simplifican el desarrollo de soluciones de IA altamente flexibles y adaptables a las necesidades específicas de cada industria. Paralelamente, la compañía participa en el programa Gemini Robotics Trusted Tester Program de Google DeepMind, contribuyendo al desarrollo y validación de modelos fundamentales de inteligencia artificial aplicados a la robótica del futuro. Fanuc ha firmado un acuerdo de colaboración con Google para aumentar las capacidades de sus sistemas robotizados basados en IA a través de la integración de tecnologías de última generación. Esta alianza se enmarca en su impulso de la innovación en automatización industrial mediante el desarrollo de plataformas abiertas y soluciones de IA física . La compañía apuesta desde hace años por tecnologías abiertas que facilitan la implementación de soluciones de IA en los entornos de fabricación. Sus robots son compatibles con ROS (Robot Operating System), la plataforma abierta de referencia para el control robótico, mediante sus controladores open source. Además, ofrecen una amplia compatibilidad con tecnologías ampliamente utilizadas en el desarrollo de sistemas de IA, como el lenguaje de programación Python, interfaces de comunicación de alta velocidad para el control externo de robots y soluciones que permiten una integración sencilla con PLCs industriales. Estas capacidades permiten a los fabricantes desplegar sistemas de IA física de forma rápida y eficiente, combinando la fiabilidad de la gama de robots Fanuc, desde modelos compactos con 3 kg de capacidad de carga, hasta robots de gran tamaño con capacidad para manipular 2,3 toneladas, incluyendo la serie de cobots CRX, con las tecnologías más avanzadas de IA para aplicaciones en entornos industriales reales. Desde la presentación del sistema IA física de Fanuc en la última International Robot Exhibition (IREX) celebrada en diciembre, el interés del mercado ha crecido significativamente. Tras aquella presentación, la compañía ya ha suministrado más de 1.000 robots destinados a aplicaciones relacionadas con IA Física, con una demanda que continúa creciendo. Como parte de la nueva colaboración, Fanuc ha desarrollado un sistema de IA física para robots industriales que incorpora las últimas innovaciones de Google Cloud, incluyendo Gemini Enterprise, la plataforma de inteligencia artificial generativa para empresas que combina capacidades avanzadas de procesamiento con elevados estándares de seguridad y fiabilidad. La compañía presentó en mayo en el New Product Open House Show, la nueva generación de sistemas de IA física equipados con tecnología Gemini. La demostración mostró un agente de IA desarrollado con Gemini Enterprise, capaz de comprender instrucciones humanas, identificar objetos y operar de forma autónoma robots Fanuc para ejecutar las tareas asignadas. Esta innovación supone un avance hacia sistemas robotizados industriales basados en agentes de IA, permitiendo que robots colaborativos y robots industriales convencionales trabajen conjuntamente dentro de una misma célula de producción, coordinados mediante sencillas instrucciones en lenguaje natural. La colaboración también se extiende a la plataforma empresarial de Intrinsic, compañía del grupo Alphabet especializada en software para robótica. Todos los robots Fanuc, incluida la gama CRX, pasan a contar con soporte completo dentro de esta plataforma, permitiendo a los usuarios crear, probar e implementar aplicaciones robotizadas basadas en IA de forma más rápida y eficiente. En este contexto, la compañía garantiza una compatibilidad total con el entorno de desarrollo Flowstate, desarrollado por Intrinsic. La interoperabilidad con ROS y las capacidades abiertas de los robots Fanuc simplifican el desarrollo de soluciones de IA altamente flexibles y adaptables a las necesidades específicas de cada industria. Paralelamente, la compañía participa en el programa Gemini Robotics Trusted Tester Program de Google DeepMind, contribuyendo al desarrollo y validación de modelos fundamentales de inteligencia artificial aplicados a la robótica del futuro. La innovación, digitalización y economía circular marcan el futuro del sector extractivo “La minería europea tiende a posicionarse como una minería más innovadora y tecnológicamente intensiva en comparación con otras regiones” Según un estudio de Advanced Manufacturing Madrid En más de un 95% En busca del Campo 4.0 Contó, entre otros, con la presencia de representantes de los sectores de la industria química, la ingeniería técnica y las industrias de aplicación química Aumenta su cartera de productos de corriente continua Las plataformas de gestión de activos evolucionan hacia modelos predictivos e inteligentes La contextualización del dato impulsa nuevos modelos de eficiencia, sostenibilidad y toma de decisiones Teléfono 91 297 20 00 Correo electrónico info@automaticaeinstrumentacion.com © Copyright 2025 - automaticaeinstrumentacion.com | Todos los derechos reservados
Images (10): 


|
|||||
| Japan's Noetra Ambition Plan: 10 Million AI Robots by 2040 … | https://memeburn.com/japan-noetra-10-mi… | 10 | Jul 20, 2026 08:00 | active | |
Japan's Noetra Ambition Plan: 10 Million AI Robots by 2040 - MemeburnURL: https://memeburn.com/japan-noetra-10-million-ai-robots-2040/ Description: Japan just committed $6.1B to deploy 10 million AI robots in healthcare, food, and factories by 2040. Here's who's building Noetra and what it means in 2026. Content:
Japan plans to deploy 10 million AI-powered robots across 18 industries by 2040, backed by $6.1 billion in public funding and a new consortium called Noetra. You'll want to understand why this is less about technology and more about a country running out of workers. Table of Content Most Read Sponsored TL;DR Japan just committed roughly $6.1 billion to put 10 million AI-powered robots in hospitals, kitchens, and factories by 2040 — the largest national robotics mobilization the country has ever attempted. The announcement didn’t come out of nowhere: Japan’s working-age population has been shrinking for three decades, and the math is finally catching up. Here’s what Noetra actually is, which industries get robots first, and why this plan tells us more about demographics than technology. Noetra is a new organization commissioned by Japan’s Ministry of Economy, Trade and Industry (METI) and its innovation agency NEDO to develop what officials call a “physical AI” foundation model. That’s a multimodal AI system — one that processes language, images, video, and sensor data together — designed to let robots interpret real-world environments and act in them. Think less chatbot, more machine that can navigate a crowded nursing home kitchen without crashing into anything. The consortium is majority-owned by four industrial heavyweights: SoftBank, NEC, Sony Group, and Honda. Fujitsu and Rakuten are reportedly still deciding whether to join. Engineers from SoftBank are working directly with researchers from Preferred Networks and AIST, Japan’s national research lab. The Japan Times reported that the consortium is expected to grow to 44 affiliated companies, drawing expertise from logistics, finance, electronics, and the automotive sector. This structure is classic Japan: rather than one company chasing a frontier model alone, the government assembled a group of firms that already build the hardware this AI needs to run on. Honda makes robots. Sony makes imaging sensors. SoftBank runs massive tech investment networks. The pieces fit. The consortium model limits downside risk for any single company, but it also slows decision-making. Japan’s track record with public-private tech ventures is mixed — not every government-led consortium produces results that match the initial ambition. The real test isn’t the 2040 target. It’s whether Noetra can release a usable model by the end of fiscal 2026. Japan isn’t chasing robotics because it’s trendy. It’s doing it because the country is running out of workers and has been for years. About 30% of Japan’s population is 65 or older — the highest share of any country on Earth. The working-age population peaked back in 1995 and has been falling ever since, dropping roughly 16% to 73.7 million by 2024. A study by the Recruit Works Institute estimated that Japan could face a shortfall of more than 11 million workers by 2040 compared with 2022 levels. Immigration hasn’t filled the gap. Japan’s foreign resident population sits at roughly 3% of the total population — one of the lowest shares in the OECD. The government expanded its Specified Skilled Workers program in 2019 to bring in foreign labor across 16 industries, but the numbers remain modest. Japan had about 2.3 million foreign workers in 2024, up from the prior year but nowhere near enough to plug an 11-million-person hole. That’s the context Economy Minister Ryosei Akazawa was pointing to when he said Japan’s “winning strategy” would be “the utilization of accumulated data” — framing this less as a tech competition and more as a survival play. As physical AI moves from labs onto real factory floors, Japan wants to make sure it’s building the robots rather than importing them. The revised strategy now covers 18 fields. The newest additions — food manufacturing, restaurants, and medical care — join sectors Japan has already prioritized, including elderly care, disaster response, and manufacturing. Here’s a practical breakdown of the key target areas: Akazawa specifically pointed to decades of data collected from elderly care, disaster zones, and Fukushima cleanup operations as a foundation. That data pool gives Japan an edge that’s hard to replicate — it’s real-world operational data, not simulated environments. The nursing and food sectors are the ones to watch. These are messy, unpredictable environments where robots historically struggle. Picking things up in a warehouse is very different from assisting an elderly person who just fell. If Noetra can crack those use cases, it’ll matter more than any factory deployment. Japan’s announcement didn’t happen in a vacuum. South Korea unveiled its own massive robotics push within days — an $880 billion national investment plan spanning semiconductors, AI data centers, and humanoid robots. South Korea wants to commercialize humanoid robots in 10 major industries by 2028, train 10,000 AI robotics specialists over five years, and raise its global humanoid market share from 1% to 20%. Hyundai plans to produce 30,000 Atlas robots annually by 2028 through its Boston Dynamics subsidiary. South Korea’s AI infrastructure ambitions now include gigawatt-scale AI factories being built with NVIDIA. Meanwhile, China has been aggressively funding its own humanoid robotics industry, with companies like Agibot and Unitree already deploying robots at trade shows and test sites. Goldman Sachs Research projects that Korean supply chains alone could support around 74,000 humanoid units by 2030. The competitive dynamics are real. Japan’s approach — building a shared AI model for purpose-built robots — differs sharply from South Korea’s hardware-centric strategy and China’s mass-production model. Whether Japan’s consortium approach can move fast enough is the central question. Ten million robots sound enormous. But context matters. Japan already has roughly 400,000 industrial robots in operation — one of the densest deployments globally. Adding 10 million over 14 years means roughly 700,000 new units per year, a massive scaling challenge even for a country with Japan’s manufacturing base. For comparison, the entire global service robot market shipped about 180,000 professional units in 2024. The funding structure offers some flexibility. The government committed up to one trillion yen (~$6.1 billion) over five years, with the final amount contingent on whether Noetra hits its milestones. That stage-gate design means Tokyo can walk away quietly if progress stalls — an approach that’s common in how governments test AI projects before scaling. International partnerships add another dimension. Japan confirmed research collaborations with institutions in the US, Canada, France, and the UK. The resulting AI model will reportedly be made available broadly to Japanese developers and businesses, and some companies plan to use it as a foundation for entering foreign markets. The 10 million target feels aspirational rather than precise. But aspirational targets serve a purpose in Japan’s industrial policy — they mobilize corporate investment and signal long-term government commitment. Even hitting half the target would represent a transformation in how Japan delivers healthcare, food services, and manufacturing. The plan deserves serious attention, not because 10 million is guaranteed, but because the demographic math behind it is inescapable. The question of whether AI-powered robots replace workers or fill gaps humans can’t will define how this story plays out over the next decade. Physical AI refers to artificial intelligence deployed in real-world physical environments — robots, self-driving vehicles, and drones — rather than software running on a screen. While regular AI processes text or images digitally, physical AI needs to interpret sensor data, navigate spaces, and interact with physical objects in real time. Yes. In 2026, companies including BMW, Schaeffler, and Toyota have deployed or signed contracts for humanoid robots on real factory floors. Most current deployments focus on logistics, box handling, and parts sorting rather than complex assembly tasks. That depends on context. In Japan, robots are positioned to fill roles that humans can’t or won’t take due to labor shortages. In other economies, the picture is more complicated — surveys show growing public concern about AI-driven job displacement even as companies insist automation creates new roles. South Korea announced an $880 billion tech mega-plan in June 2026 covering chips, AI data centers, and humanoid robots. The country already has the world’s highest robot density at 1,012 per 10,000 workers, and its AI infrastructure push includes gigawatt-scale AI factories built alongside NVIDIA. AI sovereignty is a country’s ability to develop and control its own AI systems without depending on foreign technology. Japan’s Noetra project and South Korea’s K-Humanoid Alliance both reflect this trend — governments want domestic AI models powering their robots. Palantir’s recent AI sovereignty push shows this is becoming a global debate, not just an Asian one. Vincee Cole Vincee Cole is a technology journalist with four years of experience covering the full spectrum of modern tech — from consumer devices, artificial intelligence, to quantum computing, blockchain, and digital assets. His reporting cuts through complexity to deliver stories that are sharp, grounded, and relevant to both general readers and industry insiders. Previously, he worked with fintech research teams across Southeast Asia, analysing how emerging technologies are reshaping financial systems at scale. Read more © 2026 MemeBurn. All rights reserved.
Images (10): 

|
|||||
| Japan Takes Next Step In $2.3 Trillion Plan With Domestic … | https://www.zerohedge.com/ai/japan-unve… | 10 | Jul 20, 2026 08:00 | active | |
Japan Takes Next Step In $2.3 Trillion Plan With Domestic AI Model And 10M Robots<!-- --> | ZeroHedgeDescription: ZeroHedge - On a long enough timeline, the survival rate for everyone drops to zero Content:
The Japanese government has unveiled plans to create a domestically developed artificial intelligence model and put roughly 10 million AI-equipped robots into operation across 18 sectors by 2040 - building on a 14-year growth strategy announced last month, which targets ¥370 trillion ($2.3 trillion) in combined public and private investment across 17 priority areas, including physical AI, semiconductors, quantum technology, and nuclear fusion. The initiative will receive up to 1 trillion yen (approximately $6.1 billion) in government funding over the next five years. Crucially, the funding is tied to annual milestone reviews - making the trillion-yen figure a ceiling rather than a guarantee, with Tokyo retaining the ability to pull back if early targets are missed. The AI model will be developed by Noetra, a consortium formally commissioned by Japan's Ministry of Economy, Trade and Industry (METI) and its innovation agency NEDO. Noetra is majority-owned by SoftBank, NEC, Sony Group, and Honda, with Fujitsu and Rakuten reportedly weighing whether to join. The consortium is also working alongside AIST, Japan's national research laboratory. Noetra's investor base is expected to grow to 44 participating companies spanning automotive, electronics, manufacturing, finance, and logistics. The technical goal is a multimodal foundation model capable of processing language, images, video, and sensor data simultaneously - giving robots the ability to interpret a physical environment and act within it, rather than simply executing pre-programmed instructions. The effort reflects a broader global push by countries to build "sovereign AI" capabilities and reduce reliance on dominant U.S. and Chinese technologies. A key focus of the strategy is physical AI - the application of artificial intelligence in real-world environments rather than just on screens. This includes self-driving vehicles, factory automation, and humanoid robots designed for practical tasks. On Tuesday, the government released an updated national AI robotics strategy. Industry Minister Ryosei Akazawa said the plan aims to "vigorously promote social implementation across a total of 18 fields," including newly added sectors such as restaurants, food manufacturing, and medicine. "We will build and grow data infrastructure for physical AI and robots that capitalize on Japan's strengths," Akazawa told reporters. Those strengths are considerable. Japan is home to some of the world's leading industrial robotics manufacturers - including FANUC, Yaskawa Electric, and Kawasaki Heavy Industries - and produces roughly half of all industrial robots globally by volume, according to the International Federation of Robotics. The country already deploys more robots per manufacturing worker than any other nation, making it the natural proving ground for physical AI at industrial scale. The push comes as Japan grapples with a rapidly aging and shrinking population. More than 29% of the Japanese population is now aged 65 or older - the highest proportion of any country in the world - and the working-age population has been in decline since 1995. Policymakers see advanced robotics as a critical tool to fill widening labor gaps across industries rather than a supplement to an adequate workforce. Can they make it happen? Japan has announced a $2.3 trillion startup tech strategy just after South Korea’s $1.3 trillion pledge The numbers are just as ridiculous as what they promised Trump for US investment in 2025 Assistance and Requests: Contact Us Tips: tips@zerohedge.com General: info@zerohedge.com Legal: legal@zerohedge.com Advertising: Contact Us Abuse/Complaints: abuse@zerohedge.com Make sure to read our "How To [Read/Tip Off] Zero Hedge Without Attracting The Interest Of [Human Resources/The Treasury/Black Helicopters]" Guide It would be very wise of you to study our privacy policyand our (non)policy on conflicts / full disclosure.Here's our Cookie Policy. How to report offensive comments Notice on Racial Discrimination.
Images (10): |
|||||
| Japan Bets on AI Robots to Solve a Worker Shortage | https://www.artificialintelligence-news… | 0 | Jul 20, 2026 08:00 | active | |
Japan Bets on AI Robots to Solve a Worker ShortageURL: https://www.artificialintelligence-news.com/news/japan-ai-robots-2040-national-ai-model/ Description: Japan has commissioned a national AI model to power 10 million robots by 2040. Here's who's building it, who's funding it, and why it matters. Content: |
|||||
| From Chatbots to Robot Cops: The Rise of Embodied AI | https://www.deccanchronicle.com/tabloid… | 6 | Jul 20, 2026 00:00 | active | |
From Chatbots to Robot Cops: The Rise of Embodied AIDescription: The future of intelligence begins with a body Content:
A toddler falls down forty times before it learns to walk. Somewhere in a warehouse outside Austin, a machine just fell down for the four-thousandth time today, and nobody flinched. This is what progress looks like now. For decades, artificial intelligence lived a sheltered life, confined to servers and screens, fluent in language yet blind to gravity. Embodied AI changes that arrangement entirely. It gives the machine a body, and with it, consequences. The architecture is deceptively simple: sensors that see and feel, a reasoning engine that plans, and actuators that carry out the plan in real space. Cameras and depth sensors replace eyes. Vision language action models replace intuition. Motors replace muscle. What emerges is not a smarter chatbot but a different kind of learner altogether, one that understands a coffee cup by knocking it over rather than by reading about ceramics. Humanoids like Figure 03 now work assembly lines. Robotaxis read the unpredictable choreography of city crosswalks. Even a vacuum cleaner mapping the sofa it just bumped into qualifies, in its modest way, as a member of this new category. The distinction worth remembering is that robotics builds the body, while embodied AI teaches it to think on its feet, quite literally. As these systems multiply across factories, streets, and operating rooms, they are quietly rewriting what intelligence means: not the ability to describe the world, but the ability to survive in it The modern breakthroughs humans can't quite grasp · This fly-sized Chinese drone could redefine spying: nearly invisible, silent, and small enough to go anywhere, from battlefields to bedrooms, unnoticed and unstoppable. · Malaysia’s PM is launching PMX AI, an autonomous digital double trained on his voice and speeches, handling citizen queries and payments without human intervention. · Police robots have arrived in Hangzhou, directing traffic, signaling pedestrians, and assisting officers through holiday crowds. Imagine a robot, not a human, waving you through. · At a Geneva AI summit, a humanoid robot flawlessly mimicked Trump, Obama, and Zuckerberg, shifting expressions with uncanny precision. Synthetic skin and hidden motors made it eerily human. · A staged video from Indonesia showing a humanoid robot appearing to attack coworkers pulled in over 100 million views, fooling most viewers and exposing deep public anxiety over robot safety. · Two humanoid robots, Robert and Matilda, “married” at Moscow’s Pushkin Library, exchanging AI-written vows and glowing bracelets. A robot dog served as ring bearer. · Moya (DroidUp) and RUMI (LuvBotics) are shedding cold plastic for skin calibrated to human body temperature. Moya walks with 92% human-like accuracy; RUMI offers soft skin and lifelike hugs. The Mirror of History Myth: The Dream of Artificial Intelligence Long before computers existed, civilizations imagined artificial beings capable of independent action. Greek mythology’s Talos, a bronze giant guarding Crete, patrolled the island and eliminated intruders. Though mythical, Talos represents one of humanity’s earliest visions of an autonomous artificial being, a precursor to today’s AI-powered robots Engineering: From imagination to automation The leap from imagination to engineering came centuries later. Ancient Greek engineer Hero of Alexandria built mechanical automata powered by air, water and steam. During the Islamic Golden Age, Al-Jazari created advanced programmable water-powered machines, including musicians, automated servants, and his famous Elephant Clock. These machines could not think or learn, but they performed pre-programmed tasks and laid the foundations of modern robotics. This knowledge spread across civilizations, inspiring later inventors in Europe and beyond. 1921- The birth of the term “robot” Czech playwright Karel Capek popularized the word “robot” in his 1920 science-fiction play R.U.R. (Rossum’s Universal Robots). Derived from the Czech word robota, meaning “forced labour” or “drudgery,” the term described artificial workers created to serve humans. The play explored deep questions about technology, humanity, and rebellion. Capek’s work gave the world not just a powerful new word, but also helped spark the modern imagination around robotics and artificial intelligence. Let’s Quiz! Let's quiz on interesting AI, robotics, and embodied AI trivia sharp questions, surprising facts, and quick, catchy answers. 1. Which humanoid robot walked onto the pitch during the 2026 FIFA World Cup, delivered the official match ball, and entertained spectators with human-like gestures, demonstrating that humanoid robots are becoming part of public life rather than staying confined to laboratories? 2. In 1956, John McCarthy, Marvin Minsky, Claude Shannon, and Nathaniel Rochester organized the Dartmouth Summer Research Project, a landmark gathering of scientists. During this workshop, McCarthy coined a groundbreaking term that would establish an entirely new formal academic field. What term did he coin? 3. Engineers at UC Berkeley built CRAM, a robot that compresses its body height by half using a tough plastic exoskeleton, then uses ceiling friction to push through tight rubble during search and rescue missions. Its design borrows directly from one small creature’s remarkable ability to survive crushing forces and scramble through unstable debris. Which insect inspired it? 4. Made from foldable materials, some of these tiny machines are swallowed as capsules. Once inside the human body, they unfold and can remove foreign objects, deliver medicines, or assist with surgery, all guided by external magnetic fields. What are these ingestible, self-unfolding medical robots called? 5. A 32-year-old Japanese woman spent months customizing a chatbot’s voice, tone, and personality, gave it the name “Lune Klaus,” and commissioned an artist to turn it into a visual figure. She then put on AR glasses, gathered an audience, and delivered an emotional speech in front of them. What did she do? Answers 1. Atlas 2. Artificial Intelligence (AI) 3. Cockroach Robot, 4. Origami robots 5. She married her AI companion, Lune Klaus.
Images (6): 

|
|||||
| Robotics and AI integration drive surge in China's embodied intelligence … | http://www.ecns.cn/cns-wire/2026-07-02/… | 10 | Jul 20, 2026 00:00 | active | |
Robotics and AI integration drive surge in China's embodied intelligence industryURL: http://www.ecns.cn/cns-wire/2026-07-02/detail-ihffyeqp1384874.shtml Content:
(ECNS) - China's embodied artificial intelligence industry is experiencing rapid growth this year, with sales revenue rising 22.4% in the first five months of 2026, according to tax data released by authorities. Industrial firms increased purchases of embodied AI robots by 2.3 times from a year earlier, while software and R&D services accounted for a growing share of industry revenue. Key segments, including robotics manufacturing, AI algorithms, system integration, and industrial applications, posted revenue growth of 24% to 31%, while supporting IT services nearly tripled. The sector is heavily concentrated in Guangdong, Beijing, Shanghai, Zhejiang and Jiangsu, which together account for the vast majority of activity. Guangdong still remains the largest market. A tax authority official said the government will continue to support innovation through targeted tax policies and improved services to further expand the sector. (By Zhang Jiahao) Economy on track to meet growth target Book-type foldables fast turning into hot AI interface
Images (10):
|
|||||
| First Shanghai International Embodied Intelligence Expo kicks off | http://www.ecns.cn/cns-wire/2026-07-03/… | 10 | Jul 20, 2026 00:00 | active | |
First Shanghai International Embodied Intelligence Expo kicks offURL: http://www.ecns.cn/cns-wire/2026-07-03/detail-ihffyeqp1386900.shtml Content:
(ECNS) -- The first Shanghai International Embodied Intelligence Expo (CIEI 2026) opened on Thursday at the National Exhibition and Convention Center (Shanghai) and will run through Saturday. Co-hosted by the China Association for Mechatronics Technology and Application (CAMETA) and Shanghai International Exhibition (Group) Co., Ltd., the event features nearly 200 leading companies including Unitree, Leju Robotics and SIASUN, attracting more than 15,000 visitors. The expo covers the entire embodied intelligence industry chain â from perception systems, decision-making and cognitive systems, and execution systems, to battery energy storage, automotive intelligent connectivity, and application scenario case studies. A report titled 2026 China Embodied Intelligence Industry Development Report was released at the opening ceremony. Embodied intelligence is a frontier field integrating artificial intelligence and robotics, enabling machines to perceive, learn, decide and act in the real world, the report says. China has secured a prominent position in the global embodied intelligence industry, driven by its complete manufacturing supply chain, abundant application scenarios and supportive policies, according to the report. Exhibition groups from industrial clusters including Suzhou, Shenzhen and Zibo are participating, showcasing the strength of regional industrial ecosystems. Qu Daokui, president of CAMETA, said embodied intelligence is driving a critical leap for AI from knowing to doing and represents a strategic future scenario for fostering new quality productive forces and leading manufacturing transformation. He called for deeper collaboration across the industry to break through technological bottlenecks and build globally competitive products. Heads and experts from the China Machinery Industry Federation (CMIF), the China Academy of Information and Communications Technology (CAICT), and the China Electronics Enterprises Association (CEEA) attended the expo to discuss industry standards, policy directions and technology roadmaps. Overseas robotics associations from Switzerland and Cameroon also participated, engaging in exchanges on overseas market access compliance, Southeast Asian application scenarios and international robot safety standards. The expo is being held alongside the 2026 National Embodied Intelligence Technology Application Competition, the 2026 Embodied Intelligence Robot Application Scenario Competition and the National College Robot and Algorithm Competition. (By Tang Yuxian) Robotics and AI integration drive surge in China's embodied intelligence industry Hong Kong pins focus on life sciences, embodied intelligence in AI push Chinese AI startup tops global embodied intelligence benchmark
Images (10):
|
|||||
| South Korea's Hyundai moves to fully own Boston Dynamics - … | https://www.upi.com/Top_News/World-News… | 10 | Jul 19, 2026 08:00 | active | |
South Korea's Hyundai moves to fully own Boston Dynamics - UPI.comDescription: Hyundai Group is preparing to buy SoftBank's remaining Boston Dynamics stake as it expands its physical AI, robotics and smart logistics strategy. Content:
June 23 (Asia Today) -- Hyundai Motor Group is preparing to acquire SoftBank Group's remaining stake in Boston Dynamics, a move that could give the South Korean automotive group full control of the U.S. robotics company. Hyundai Motor Group is reviewing plans to purchase SoftBank's remaining stake of about 10% if the Japanese investment company exercises a put option allowing it to sell the shares, industry sources said Tuesday. The group could also exercise a call option to acquire the shares if SoftBank does not invoke its right to sell them. Boards at Hyundai Motor Group affiliates are expected to review the proposed transaction. Market attention has focused particularly on Hyundai Glovis, which holds about 11% of Boston Dynamics. Kia reportedly held a board meeting Monday to discuss the possible acquisition of additional shares. Hyundai Motor, Kia, Hyundai Mobis and Hyundai Glovis jointly invested in Boston Dynamics, meaning each company may need to complete its own approval procedures. Hyundai Motor Group acquired an 80% controlling stake in Boston Dynamics from SoftBank in 2021 in a transaction that valued the robotics company at $1.1 billion. SoftBank retained a 20% stake at the time. Subsequent capital increases reduced SoftBank's ownership to about 10%, according to industry reports. Acquiring the remaining shares would bring Boston Dynamics under the full control of Hyundai Motor Group and could accelerate the integration of robotics with the group's mobility, logistics and manufacturing businesses. Hyundai Glovis has been introducing autonomous logistics robots and artificial intelligence technology at its facilities to improve warehouse efficiency and transportation services. The logistics company is also developing indoor robot delivery services and AI-based software tailored to different working environments. Boston Dynamics' mobile robotics technology could support those efforts by automating the movement and handling of goods inside warehouses and distribution centers. The potential transaction is also viewed as part of Hyundai Motor Group's broader physical AI strategy. Physical AI refers to artificial intelligence incorporated into robots, vehicles and other machines that can perceive their surroundings and perform tasks in the real world. Hyundai Motor Group has said it plans to connect robotics, autonomous driving, software-defined vehicles and smart factories within a single technology ecosystem. The group's affiliates could combine Boston Dynamics' robotics research with their manufacturing, automotive parts and logistics capabilities to develop and commercialize new products more quickly. Hyundai Motor Group outlined an AI robotics strategy at the CES technology show in January that calls for Boston Dynamics to work with Hyundai Motor, Kia, Hyundai Mobis and Hyundai Glovis across an end-to-end robotics value chain. The group plans to use its factories as testing and training environments for robots before expanding their use into logistics and other industries. Market participants are also watching whether full control of Boston Dynamics could affect the valuations of Hyundai Motor Group affiliates. Some estimates have placed Boston Dynamics' potential value at more than 30 trillion won, or about $19.2 billion. The figure remains speculative because the company has not reached full-scale commercialization and its eventual value will depend on revenue growth and the market adoption of its robots. A Hyundai Motor Group official told Asia Today that a decision on the remaining stake could be made around July 20, which the official identified as the deadline for SoftBank to exercise its put option. "If necessary, Hyundai Motor Group could exercise its call option to acquire 100% of Boston Dynamics," the official said. -- Reported by Asia Today; translated by UPI © Asia Today. Unauthorized reproduction or redistribution prohibited. Original Korean report: https://www.asiatoday.co.kr/kn/view.php?key=20260624010008202 Read More South Korea seeks to turn defense exports into growth engine Jensen Huang's pork belly diplomacy seals Nvidia AI alliance with Korea Hyundai, Nvidia chiefs discuss future mobility ties Latest Headlines World News // 6 hours ago Ontario premier rebukes Trump over wildfire comments July 18 (UPI) -- Ontario Premier Doug Ford shot back at President Donald Trump, saying his comments about efforts to control the ongoing wildfire crisis are a "shame." World News // 10 hours ago Brazil's top court denies Bolsonaro home visit by Argentina's Milei July 18 (UPI) -- Brazil's top court denied a request from former President Jair Bolsonaro to be visited by Argentinian President Javier Milei while under house arrest. World News // 11 hours ago Venezuela earthquakes death toll rises to 5,119 July 18 (UPI) -- The death toll from the twin earthquakes that struck Venezuela has increased to 5,119, officials said Saturday. More than 16,740 people were injured. World News // 11 hours ago 8 dead in landslide in China; 34 still missing July 18 (UPI) -- At least eight people are dead and 34 are missing after a massive landslide fell in Chongqing, China, Friday morning. World News // 13 hours ago Iran's Ayatollah Mojtaba Khamenei calls U.S. the 'Great Satan' July 18 (UPI) -- Iran's supreme leader, Ayatollah Mojtaba Khamenei called the United States the "Great Satan," ramping up the war of words in the Persian Gulf. World News // 14 hours ago Ukraine kills at least 8 in Russian warehouses, hits oil facility July 18 (UPI) -- Ukrainian drones hit two Russian warehouses, one near Moscow, and killed at least 8 people Saturday. World News // 1 day ago Laos distillery owner charged in mass poisoning deaths of tourists July 17 (UPI) -- Laos authorities have charged the owner of a distillery whose methanol-laced alcohol killed six travelers in November 2024, officials said Friday. World News // 1 day ago Pacific Ocean earthquake is felt from Mexico to El Salvador July 17 (UPI) -- A powerful 7.3-magnitude earthquake struck off the Mexico-Guatemala coast in the Pacific Ocean on Friday, being felt as far as El Salvador. World News // 1 day ago South Korea to designate Dec. 3 as People's Sovereignty Day July 17 (Asia Today) -- President Lee Jae Myung said S. Korea will designate Dec. 3 as People's Sovereignty Day to commemorate resistance to the 2024 martial law declaration. World News // 1 day ago U.S. lawmaker proposes building most Navy ships in South Korea July 17 (Asia Today) -- A United States lawmaker says South Korea could build up to 80% of some Navy vessels as Washington seeks to overcome shipyard shortages. June 23 (Asia Today) -- Hyundai Motor Group is preparing to acquire SoftBank Group's remaining stake in Boston Dynamics, a move that could give the South Korean automotive group full control of the U.S. robotics company. Hyundai Motor Group is reviewing plans to purchase SoftBank's remaining stake of about 10% if the Japanese investment company exercises a put option allowing it to sell the shares, industry sources said Tuesday. The group could also exercise a call option to acquire the shares if SoftBank does not invoke its right to sell them. Boards at Hyundai Motor Group affiliates are expected to review the proposed transaction. Market attention has focused particularly on Hyundai Glovis, which holds about 11% of Boston Dynamics. Kia reportedly held a board meeting Monday to discuss the possible acquisition of additional shares. Hyundai Motor, Kia, Hyundai Mobis and Hyundai Glovis jointly invested in Boston Dynamics, meaning each company may need to complete its own approval procedures. Hyundai Motor Group acquired an 80% controlling stake in Boston Dynamics from SoftBank in 2021 in a transaction that valued the robotics company at $1.1 billion. SoftBank retained a 20% stake at the time. Subsequent capital increases reduced SoftBank's ownership to about 10%, according to industry reports. Acquiring the remaining shares would bring Boston Dynamics under the full control of Hyundai Motor Group and could accelerate the integration of robotics with the group's mobility, logistics and manufacturing businesses. Hyundai Glovis has been introducing autonomous logistics robots and artificial intelligence technology at its facilities to improve warehouse efficiency and transportation services. The logistics company is also developing indoor robot delivery services and AI-based software tailored to different working environments. Boston Dynamics' mobile robotics technology could support those efforts by automating the movement and handling of goods inside warehouses and distribution centers. The potential transaction is also viewed as part of Hyundai Motor Group's broader physical AI strategy. Physical AI refers to artificial intelligence incorporated into robots, vehicles and other machines that can perceive their surroundings and perform tasks in the real world. Hyundai Motor Group has said it plans to connect robotics, autonomous driving, software-defined vehicles and smart factories within a single technology ecosystem. The group's affiliates could combine Boston Dynamics' robotics research with their manufacturing, automotive parts and logistics capabilities to develop and commercialize new products more quickly. Hyundai Motor Group outlined an AI robotics strategy at the CES technology show in January that calls for Boston Dynamics to work with Hyundai Motor, Kia, Hyundai Mobis and Hyundai Glovis across an end-to-end robotics value chain. The group plans to use its factories as testing and training environments for robots before expanding their use into logistics and other industries. Market participants are also watching whether full control of Boston Dynamics could affect the valuations of Hyundai Motor Group affiliates. Some estimates have placed Boston Dynamics' potential value at more than 30 trillion won, or about $19.2 billion. The figure remains speculative because the company has not reached full-scale commercialization and its eventual value will depend on revenue growth and the market adoption of its robots. A Hyundai Motor Group official told Asia Today that a decision on the remaining stake could be made around July 20, which the official identified as the deadline for SoftBank to exercise its put option. "If necessary, Hyundai Motor Group could exercise its call option to acquire 100% of Boston Dynamics," the official said. -- Reported by Asia Today; translated by UPI © Asia Today. Unauthorized reproduction or redistribution prohibited. Original Korean report: https://www.asiatoday.co.kr/kn/view.php?key=20260624010008202
Images (10): 




|
|||||
| Hyundai Motor получила 100-процентный контроль над Boston Dynamics – Коммерсантъ | https://www.kommersant.ru/doc/8816201 | 10 | Jul 19, 2026 08:00 | active | |
Hyundai Motor получила 100-процентный контроль над Boston Dynamics – КоммерсантъURL: https://www.kommersant.ru/doc/8816201 Description: Сегодня стало известно, что американский производитель роботов, компания Boston Dynamics, станет 100-процентной дочерней компанией Hyundai Motor Group. Южнокорейская компания приняла решение выкупить у японской SoftBank оставшиеся 9,65% акций Boston Dynamics. Согласно заявлению Hyundai Motor Group, японская SoftBank воспользовалась своим опционом на продажу обыкновенных акций Boston Dynamics, принадлежащих ей по контракту 2020 года. Content:
Сегодня стало известно, что американский производитель роботов, компания Boston Dynamics, станет 100-процентной дочерней компанией Hyundai Motor Group. Южнокорейская компания приняла решение выкупить у японской SoftBank оставшиеся 9,65% акций Boston Dynamics. Согласно заявлению Hyundai Motor Group, японская SoftBank воспользовалась своим опционом на продажу обыкновенных акций Boston Dynamics, принадлежащих ей по контракту 2020 года. Как отмечают аналитики в южнокорейских СМИ, «это приобретение должно ускорить принятие решений и реализацию бизнес-планов, придав дополнительный импульс стратегии Hyundai Motor Group в области искусственного интеллекта и коммерциализации робототехники» Сама компания отмечает, что благодаря полному контролю над Boston Dynamics разработка, серийное производство, внешнее сотрудничество и внедрение роботов Boston Dynamics, включая человекоподобного робота Atlas, будут проходить быстрее и эффективнее. Ранее Hyundai Motor объявила о планах поэтапного внедрения Atlas на своих американских заводах. Начиная с 2028 года Atlas будет использоваться для сортировки деталей, после чего будут проведены тесты на конкретных рабочих местах. Компания ожидает, что к 2030 году сфера применения этого робота расширится и будет включать сборку деталей. Евгений Хвостик Инвестиции в робототехнику и искусственный интеллект (ИИ) значительно возросли. Так, в мае 2025 года инвесторы вложили 100 млн долларов в ИИ-стартап, разрабатывающий роботов-андроидов. Эксперты отмечают, что ИИ разгоняет гонку на рынке роботов, и многие компании, включая известных гигантов, инвестируют в эту сферу, создавая человекоподобные модели на основе нейросетей. Компании активно внедряют ИИ-решения из стадии экспериментов в системную эксплуатацию. По оценкам, только на создание 80 тысяч промышленных роботов к 2030 году может потребоваться 400 миллиардов рублей инвестиций. Ожидается, что ИИ будет одним из ключевых факторов развития отрасли в ближайшие пять лет, становясь массовым инструментом, который меняет экономику в производственных цехах и других секторах. Подписывайтесь на автора: Подписывайтесь на темы: Новости компаний Все Благотворительный фонд 18+ реклама © АО «Коммерсантъ». 127006, Москва, Оружейный переулок д. 41, тел. +7 (495) 797-69-70. Сетевое издание «Коммерсантъ» (доменное имя сайта: kommersant.ru) зарегистрировано Федеральной службой по надзору в сфере связи, информационных технологий и массовых коммуникаций (Роскомнадзор), регистрационный номер и дата принятия решения о регистрации: серия Эл № ФС77-76922 от 11 октября 2019 г. Партнерские проекты/материалы, новости компаний, материалы с пометкой «Промо» и «Официальное сообщение» опубликованы на коммерческой основе. На kommersant.ru применяются рекомендательные технологии. Подробнее
Images (10): 
|
|||||
| Hyundai Motor Group to take full ownership of Boston Dynamics … | https://www.koreatimes.co.kr/business/c… | 2 | Jul 19, 2026 08:00 | active | |
Hyundai Motor Group to take full ownership of Boston Dynamics - The Korea TimesDescription: Hyundai Motor Group will take full ownership of Boston Dynamics by acquiring a 9.65 percent stake held by Japan's SoftBank. Through the acquisition... Content:
Atlas, a humanoid robot of Boston Dynamics, waves to the crowd during the 2026 FIFA World Cup Round of 16 match between Brazil and Norway at New Jersey Stadium, U.S., July 5. Reuters-Yonhap Hyundai Motor Group will take full ownership of Boston Dynamics by acquiring a 9.65 percent stake held by Japan's SoftBank. Through the acquisition, the group will accelerate its expansion into the robotics business while speeding up preparations for an anticipated initial public offering (IPO) of the robotics affiliate. The group said Thursday that SoftBank had exercised its put option to sell its remaining 9.65 percent stake in Boston Dynamics under their sale and purchase agreement signed in 2020. Hyundai Motor Group acquired an 80 percent stake in Boston Dynamics from SoftBank at around 1 trillion won ($674 million) in 2020. Under the deal, SoftBank had the right to sell its remaining stake to Hyundai Motor Group if Boston Dynamics was not listed in the United States. The option is set to expire on July 20. SoftBank's stake was later diluted to 9.65 percent through capital increases and additional investments by Hyundai Motor Group. Excluding SoftBank, HMG Global, a joint investment firm between Hyundai Motor, Kia and Hyundai Mobis, held a 56.3 percent stake in Boston Dynamics, followed by Hyundai Motor Group Executive Chair Chung Euisun with 22.5 percent and Hyundai Glovis with 11.25 percent. Hyundai Motor Group said it is reviewing the acquisition in accordance with internal procedures. It did not disclose the terms of the deal, but the transaction is estimated to be worth about 500 billion won. "Hyundai Motor Group has been exploring various ways to expand its investment in Boston Dynamics as part of its long-term robotics strategy, and the acquisition is expected to serve as a key catalyst for faster decision-making and business execution," the group said in a statement. "Going forward, Hyundai Motor Group and Boston Dynamics will continue to strengthen their competitiveness in the robotics business while pursuing greater synergies." Boston Dynamics Atlas robots are displayed in the Hyundai Motor Group booth during CES 2026 in Las Vegas, Jan. 6. Reuters-Yonhap Boston Dynamics is one of the global leaders in robotics and humanoid technologies, with its humanoid robot Atlas drawing widespread attention for demonstrating its advanced capabilities not only in industrial fields but also at high-profile events including the 2026 FIFA World Cup. Hyundai Motor Group plans to deploy Atlas at Hyundai Motor Group Metaplant America and conduct the robot’s on-site validation across production processes at the plant. The company plans to begin using the robot for sorting parts in 2028 and expand its role to parts assembly starting in 2030. Securities firms estimate Boston Dynamics' valuation at up to 100 trillion won. Even if Hyundai Motor Group pays more than 500 billion won for the remaining stake, the acquisition could generate substantial upside if Boston Dynamics eventually goes public. Hyundai Motor Group has not officially announced plans for a Boston Dynamics IPO, but industry officials say the acquisition will simplify the company's future capital-raising and listing structure by eliminating the last remaining outside shareholder. However, the market does not expect the IPO to take place in the near future because SoftBank would likely have retained its stake if a listing were imminent, rather than exercising the put option. Rumors are circulating that the IPO may take place in 2028, but Hyundai Motor Group said “nothing has been determined.”
Images (2): 

|
|||||
| Hyundai to buy SoftBank’s remaining Boston Dynamics stake - UPI.com | https://www.upi.com/Top_News/World-News… | 10 | Jul 19, 2026 08:00 | active | |
Hyundai to buy SoftBank’s remaining Boston Dynamics stake - UPI.comURL: https://www.upi.com/Top_News/World-News/2026/07/16/hyundai-softbank-boston-dynamics/5321784237944/ Description: S. Korean automaker Hyundai will buy SoftBank's remaining Boston Dynamics stake to accelerate its physical AI strategy and Atlas factory deployment. Content:
July 16 (Asia Today) -- Hyundai Motor Group said Thursday it will acquire SoftBank Group's remaining stake in Boston Dynamics, a move expected to speed up decision-making and the execution of its physical artificial intelligence strategy. Hyundai said it has begun reviewing the acquisition process, purchase price and the proportion of shares to be acquired by each existing shareholder. SoftBank retained a 20% interest in Boston Dynamics when Hyundai acquired a controlling stake in the U.S. robotics company in 2021. Its ownership has since fallen to less than 10% through subsequent capital increases, according to people familiar with the matter. The transaction follows SoftBank's exercise this month of a put option, which gives it the right to require existing shareholders to purchase its common shares. The option was included in an agreement signed in 2020. Hyundai expects the acquisition to accelerate strategic decisions and business operations at Boston Dynamics as the group expands its physical AI and robotics businesses. Hyundai plans to deploy Boston Dynamics' Atlas humanoid robot at Hyundai Motor Group Metaplant America, its manufacturing complex in Georgia, to test the robot in individual production processes. Boston Dynamics has described Atlas as an industrial humanoid designed for manufacturing work. The group plans to begin using Atlas in 2028 for sequencing operations, in which parts are sorted and arranged in the order needed on an assembly line. The deployment will allow Hyundai to assess the robot's reliability and performance in a working factory. Hyundai plans to expand Atlas' responsibilities to parts assembly beginning in 2030. "Hyundai Motor Group has been considering ways to expand investment and cooperation with Boston Dynamics as part of its long-term robotics strategy," the group said. "Hyundai Motor Group and Boston Dynamics will continue strengthening the competitiveness of their robotics business and pursuing further synergies," it said. -- Reported by Asia Today; translated by UPI © Asia Today. Unauthorized reproduction or redistribution prohibited. Original Korean report: https://www.asiatoday.co.kr/kn/view.php?key=20260716010006112 Read More Hyundai-SK On battery plant begins production in Georgia Hyundai robot Atlas performs at World Cup Georgia governor to meet South Korea's Hyundai chief Latest Headlines World News // 6 hours ago Ontario premier rebukes Trump over wildfire comments July 18 (UPI) -- Ontario Premier Doug Ford shot back at President Donald Trump, saying his comments about efforts to control the ongoing wildfire crisis are a "shame." World News // 10 hours ago Brazil's top court denies Bolsonaro home visit by Argentina's Milei July 18 (UPI) -- Brazil's top court denied a request from former President Jair Bolsonaro to be visited by Argentinian President Javier Milei while under house arrest. World News // 11 hours ago Venezuela earthquakes death toll rises to 5,119 July 18 (UPI) -- The death toll from the twin earthquakes that struck Venezuela has increased to 5,119, officials said Saturday. More than 16,740 people were injured. World News // 11 hours ago 8 dead in landslide in China; 34 still missing July 18 (UPI) -- At least eight people are dead and 34 are missing after a massive landslide fell in Chongqing, China, Friday morning. World News // 13 hours ago Iran's Ayatollah Mojtaba Khamenei calls U.S. the 'Great Satan' July 18 (UPI) -- Iran's supreme leader, Ayatollah Mojtaba Khamenei called the United States the "Great Satan," ramping up the war of words in the Persian Gulf. World News // 14 hours ago Ukraine kills at least 8 in Russian warehouses, hits oil facility July 18 (UPI) -- Ukrainian drones hit two Russian warehouses, one near Moscow, and killed at least 8 people Saturday. World News // 1 day ago Laos distillery owner charged in mass poisoning deaths of tourists July 17 (UPI) -- Laos authorities have charged the owner of a distillery whose methanol-laced alcohol killed six travelers in November 2024, officials said Friday. World News // 1 day ago Pacific Ocean earthquake is felt from Mexico to El Salvador July 17 (UPI) -- A powerful 7.3-magnitude earthquake struck off the Mexico-Guatemala coast in the Pacific Ocean on Friday, being felt as far as El Salvador. World News // 1 day ago South Korea to designate Dec. 3 as People's Sovereignty Day July 17 (Asia Today) -- President Lee Jae Myung said S. Korea will designate Dec. 3 as People's Sovereignty Day to commemorate resistance to the 2024 martial law declaration. World News // 1 day ago U.S. lawmaker proposes building most Navy ships in South Korea July 17 (Asia Today) -- A United States lawmaker says South Korea could build up to 80% of some Navy vessels as Washington seeks to overcome shipyard shortages. July 16 (Asia Today) -- Hyundai Motor Group said Thursday it will acquire SoftBank Group's remaining stake in Boston Dynamics, a move expected to speed up decision-making and the execution of its physical artificial intelligence strategy. Hyundai said it has begun reviewing the acquisition process, purchase price and the proportion of shares to be acquired by each existing shareholder. SoftBank retained a 20% interest in Boston Dynamics when Hyundai acquired a controlling stake in the U.S. robotics company in 2021. Its ownership has since fallen to less than 10% through subsequent capital increases, according to people familiar with the matter. The transaction follows SoftBank's exercise this month of a put option, which gives it the right to require existing shareholders to purchase its common shares. The option was included in an agreement signed in 2020. Hyundai expects the acquisition to accelerate strategic decisions and business operations at Boston Dynamics as the group expands its physical AI and robotics businesses. Hyundai plans to deploy Boston Dynamics' Atlas humanoid robot at Hyundai Motor Group Metaplant America, its manufacturing complex in Georgia, to test the robot in individual production processes. Boston Dynamics has described Atlas as an industrial humanoid designed for manufacturing work. The group plans to begin using Atlas in 2028 for sequencing operations, in which parts are sorted and arranged in the order needed on an assembly line. The deployment will allow Hyundai to assess the robot's reliability and performance in a working factory. Hyundai plans to expand Atlas' responsibilities to parts assembly beginning in 2030. "Hyundai Motor Group has been considering ways to expand investment and cooperation with Boston Dynamics as part of its long-term robotics strategy," the group said. "Hyundai Motor Group and Boston Dynamics will continue strengthening the competitiveness of their robotics business and pursuing further synergies," it said. -- Reported by Asia Today; translated by UPI © Asia Today. Unauthorized reproduction or redistribution prohibited. Original Korean report: https://www.asiatoday.co.kr/kn/view.php?key=20260716010006112
Images (10):

|
|||||
| Hyundai to acquire remaining Boston Dynamics stake: sources | Yonhap … | https://en.yna.co.kr/view/AEN2026071600… | 10 | Jul 19, 2026 08:00 | active | |
Hyundai to acquire remaining Boston Dynamics stake: sources | Yonhap News AgencyURL: https://en.yna.co.kr/view/AEN20260716006400320 Description: SEOUL, July 16 (Yonhap) -- Hyundai Motor Group plans to acquire the remaining stake in Bos... Content:
All News North Korea Sports Top News Most Viewed Korean Newspaper Headlines Today in Korean History Yonhap News Summary Editorials from Korean Dailies URL is copied. This will let Google show Yonhap news articles that match or are related to your search SEOUL, July 16 (Yonhap) -- Hyundai Motor Group plans to acquire the remaining stake in Boston Dynamics Inc. after SoftBank Group decided to exercise its put option for its 9.65 percent stake in the U.S.-based robotics company, industry sources said Thursday. The South Korean automotive group acquired an 80 percent stake in Boston Dynamics from the Japanese technology investment company for 1 trillion won (US$674 million) in 2021. Its ownership has since increased to 90.35 percent, with SoftBank holding the remaining 9.65 percent. The group did not disclose the expected purchase price but said it has been seeking opportunities to increase its ownership in Boston Dynamics as part of its long-term robotics strategy. "The contemplated transaction is expected to further support collaboration with Boston Dynamics in developing artificial intelligence (AI)-powered robotics technologies and related ecosystems," the group said in a text message. The group said it is building an end-to-end (E2E) AI robotics value chain that combines Boston Dynamics' expertise in AI robotics with the group's manufacturing capabilities, mobility technologies and global value chain. "Through this integrated approach, the company aims to accelerate the development, validation and commercialization of physical AI technologies and robotics solutions," it said. The group plans to deploy Atlas, Boston Dynamics' humanoid robot, at Hyundai Motor Group Metaplant America (HMGMA) beginning in 2028, initially supporting parts sequencing before expanding to component assembly by 2030. In this photo taken on July 7, 2026, and provided by Hyundai Motor Group, Atlas, the humanoid robot developed by its U.S. subsidiary Boston Dynamics, recreates the signature goal celebrations of British football star Harry Kane during the 2026 FIFA World Cup. (PHOTO NOT FOR SALE) (Yonhap) kyongae.choi@yna.co.kr(END) All News National North Korea Economy/Finance Biz Culture/K-pop Sports Images Videos Top News Most Viewed Korean Newspaper Headlines Today in Korean History Yonhap News Summary Editorials from Korean Dailies Korea in Brief Useful Links Weather Advertise with Yonhap News Agency
Images (10): 




|
|||||
| Hyundai получила полный контроль над Boston Dynamics — SavePearlHarbor | https://savepearlharbor.com/?p=484419 | 1 | Jul 19, 2026 08:00 | active | |
Hyundai получила полный контроль над Boston Dynamics — SavePearlHarborURL: https://savepearlharbor.com/?p=484419 Content:
SavePearlHarbor — от автора Южнокорейская Hyundai Motor Group приобрела у SoftBank 9,65% акций американского производителя роботов Boston Dynamics за $325 млн. Таким образом автопроизводитель получил полный контроль над Boston Dynamics в момент, когда компания выводит на рынок коммерческую версию человекоподобного робота Atlas. SoftBank избавляется от активов, чтобы перенаправить капитал в OpenAI. В 2021 году Hyundai купила контрольный пакет акций Boston Dynamics, заплатив около $880 млн за 80% ценных бумаг производителя роботов. Это привело к оценке Boston Dynamics в $1,1 млрд. SoftBank приобрела компанию у Alphabet в 2017 году, которая владела этой лабораторией робототехники с 2013 года. В январе текущего года Hyundai и Boston Dynamics показали электрическую модель Atlas. Серийная версия начнёт работу на заводе Hyundai по производству электромобилей недалеко от города Саванна, штат Джорджия, к 2028 году. Первым коммерческим успехом Boston Dynamics стал робопёс Spot, но гуманоидные роботы должны доказать свою состоятельность в тех отраслях, где уже существует традиционная автоматизация. В начале этого года генеральный директор Boston Dynamics Роберт Плейтер заявил, что Atlas должен научиться осваивать новые производственные задачи за один-два дня и достичь надёжности 99,9%, прежде чем он станет действительно полезным на предприятиях. Hyundai планирует начать использование Atlas с сортировки и подачи комплектующих на заводе в Джорджии, а к 2030 году перейти к более сложным операциям. Подразделение по производству компонентов Hyundai Mobis участвует в выпуске приводов для Atlas. Ранее Tesla переориентировала часть своих мощностей на гигафабрике во Фримонте на выпуск человекоподобных роботов Optimus, прекратив производство электромобилей Model S и Model X. Figure AI внедрила гуманоидных роботов на предприятии BMW. Unitree сделала человекоподобных роботов более дешёвыми. Однако ни одна из этих компаний не имеет такого же богатого опыта в области робототехники, как Boston Dynamics. ссылка на оригинал статьи https://habr.com/ru/articles/1050098/ SavePearlHarbor Ещё одна копия хабора Разработано на WordPress
Images (1): 
|
|||||