AUTOMATION HISTORY
1191
Total Articles Scraped
2288
Total Images Extracted
Scraped Articles
New Automation| Action | Title | URL | Images | Scraped At | Status |
|---|---|---|---|---|---|
| What are physical AI and embodied AI? The robots know … | https://www.fastcompany.com/91363903/fo… | 1 | Jan 04, 2026 16:00 | active | |
What are physical AI and embodied AI? The robots know - Fast CompanyDescription: Physical AI and Embodied AI, which allow bots to understand and navigate the real world—are powering the robot revolution. Content:
LOGIN 07-19-2025TECH Physical AI and Embodied AI, which allow bots to understand and navigate the real world—are powering the robot revolution. [Photo: Amazon] BY Michael Grothaus Amazon recently announced that it had deployed its one-millionth robot across its workforce since rolling out its first bot in 2012. The figure is astounding from a sheer numbers perspective, especially considering that we’re talking about just one company. The one million bot number is all the more striking, though, since it took Amazon merely about a dozen years to achieve. It took the company nearly 30 years to build its current workforce of 1.5 million humans. At this rate, Amazon could soon “employ” more bots than people. Other companies are likely to follow suit, and not just in factories. Robots will be increasingly deployed in a wide range of traditional blue-collar roles, including delivery, construction, and agriculture, as well as in white-collar spaces like retail and food services. This occupational versatility will not only stem from their physical designs—joints, gyroscopes, and motors—but also from the two burgeoning fields of artificial intelligence that power their “brains”: Physical AI and Embodied AI. Here’s what you need to understand about each and how they differ from the generative AI that powers chatbots like ChatGPT. Physical AI refers to artificial intelligence that understands the physical properties of the real world and how these properties interact. As artificial intelligence leader Nvidia explains it, Physical AI is also known as “generative physical AI” because it can analyze data about physical processes and generate insights or recommendations for actions that a person, government, or machine should take. In other words, Physical AI can reason about the physical world. This real-world reasoning ability has numerous applications. A Physical AI system receiving data from a rain sensor may be able to predict if a certain location will flood. It can make these predictions by reasoning about real-time weather data using its understanding of the physical properties of fluid dynamics, such as how water is absorbed or repelled by specific landscape features. Physical AI can also be used to build digital twins of environments and spaces, from an individual factory to an entire city. It can help determine the optimal floor placement for heavy manufacturing equipment, for example, by understanding the building’s physical characteristics, such as the weight capacity of each floor based on its material composition. Or it can improve urban planning by analyzing things like traffic flows, how trees impact heat retention on streets, and how building heights affect sunlight distribution in neighborhoods. Embodied AI refers to artificial intelligence that “lives” inside (“embodies”) a physical vessel that can move around and physically interact with the real world. Embodied AI can inhabit various objects, including smart vacuum cleaners, humanoid robots, and self-driving cars. Fast Company & Inc © 2026 Mansueto Ventures, LLC Fastcompany.com adheres to NewsGuard’s nine standards of credibility and transparency. Learn More
Images (1): 
|
|||||
| Accelerating the Evolution of Automotive Embodied Intelligence, Geely Auto Group … | https://www.manilatimes.net/2025/07/31/… | 0 | Jan 04, 2026 16:00 | active | |
Accelerating the Evolution of Automotive Embodied Intelligence, Geely Auto Group Teams Up with StepFun for a Joint Showcase at the 2025 World Artificial Intelligence ConferenceDescription: Hangzhou, China, July 30, 2025 (GLOBE NEWSWIRE) -- On July 26, Geely Auto Group partnered with its strategic tech ecosystem partner, StepFun, to jointly exhib... Content: |
|||||
| KraneShares Launches First Global Humanoid & Embodied Intelligence ETF (Ticker: … | https://markets.businessinsider.com/new… | 1 | Jan 04, 2026 16:00 | active | |
KraneShares Launches First Global Humanoid & Embodied Intelligence ETF (Ticker: KOID) On Nasdaq | Markets InsiderDescription: NEW YORK, June 05, 2025 (GLOBE NEWSWIRE) -- Krane Funds Advisors, LLC (“KraneShares”), an asset management firm known for its global exchange-tr... Content:
NEW YORK, June 05, 2025 (GLOBE NEWSWIRE) -- Krane Funds Advisors, LLC (“KraneShares”), an asset management firm known for its global exchange-traded funds (ETFs), announced the launch of the KraneShares Global Humanoid and Embodied Intelligence Index ETF (Ticker: KOID). KOID represents the first US-listed thematic equity ETF that captures the global humanoid opportunity.1 Thanks to breakthroughs in Artificial Intelligence (AI), machine learning, advanced materials, and robotics manufacturing, commercial and retail applications of humanoid robotics and embodied intelligence are now a reality. Humanoid robots—including Tesla’s Optimus, Figure AI, and Unitree—are already demonstrating impressive performance in human tasks, including in both factory and home settings. The Morgan Stanley Global Humanoid Model projects there could be 1 billion humanoids and $5 trillion in annual revenue by 2050.2 KOID seeks to capture the global humanoid and embodied intelligence ecosystem, which refers to AI systems integrated into physical machines that can sense, learn, and interact with the real world. Humanoid robotics, a key subset of embodied intelligence, focuses on robots with human-like forms and capabilities designed to work seamlessly in environments built for people, like factories, hospitals, and homes. The acceleration of bringing robots to the commercial and retail markets stems from the need to address urgent global challenges like labor shortages, aging populations, and greater efficiency and safety across industries. “Soon, the cost of a humanoid robot could be less than a car3,” said KraneShares Senior Investment Strategist Derek Yan, CFA. “We see compelling investment opportunities among the humanoid enablers and supply-chain partners that will bring humanoid robots into our daily lives at scale." Unlike legacy robotics‐focused ETFs, KOID focuses exclusively on humanoid robotics and embodied AI, positioning itself at the forefront of the next generation of robotics innovation. KOID aims to capture the full spectrum of enabling technologies that form the foundation of humanoid development, including humanoid integration & manufacturing, mechanical systems, sensing & perception, actuation systems (the “muscle” of the robot), semiconductors & technology, and critical materials. KOID offers global exposure to companies based primarily in the United States, China, and Japan within the information technology, industrial, and consumer discretionary sectors. “We are excited to bring the Humanoid opportunity to global investors through KOID, the latest addition to our suite of innovative global thematic ETFs,” said KraneShares CEO Jonathan Krane. “At KraneShares, our core goal is to launch strategies like KOID to capture emerging megatrends, giving our clients access to powerful growth opportunities as they accelerate.” The KOID ETF will track the MerQube Global Humanoid and Embodied Intelligence Index, which is designed to capture the performance of companies engaged in humanoid and embodied intelligence-related business. For more information on the KraneShares Global Humanoid and Embodied Intelligence Index ETF (Ticker: KOID), please visit https://kraneshares.com/koid or consult your financial advisor. About KraneShares KraneShares is a specialist investment manager focused on China, Climate, and Alternatives. KraneShares seeks to provide innovative, high-conviction, and first-to-market strategies based on the firm and its partners' deep investing knowledge. KraneShares identifies and delivers groundbreaking capital market opportunities and believes investors should have cost-effective and transparent tools for attaining exposure to various asset classes. The firm was founded in 2013 and serves institutions and financial professionals globally. The firm is a signatory of the United Nations-supported Principles for Responsible Investment (UN PRI). Citations: Carefully consider the Funds’ investment objectives, risk factors, charges and expenses before investing. This and additional information can be found in the Funds' full and summary prospectus, which may be obtained by visiting https:// kraneshares.com/koid . Read the prospectus carefully before investing. Risk Disclosures: Investing involves risk, including possible loss of principal. There can be no assurance that a Fund will achieve its stated objectives. Indices are unmanaged and do not include the effect of fees. One cannot invest directly in an index. This information should not be relied upon as research, investment advice, or a recommendation regarding any products, strategies, or any security in particular. This material is strictly for illustrative, educational, or informational purposes and is subject to change. Certain content represents an assessment of the market environment at a specific time and is not intended to be a forecast of future events or a guarantee of future results; material is as of the dates noted and is subject to change without notice. Humanoid and embedded intelligence technology companies often face high research and capital costs, resulting in variable profitability in a competitive market where products can quickly become obsolete. Their reliance on intellectual property makes them vulnerable to losses, while legal and regulatory changes can impact profitability. Defining these companies can be complex, and some may risk commercial failure. They are also affected by global scientific developments, leading to rapid obsolescence, and may be subject to government regulations. Many companies in which the Fund invests may not currently be profitable, with no guarantee of future success. A-Shares are issued by companies in mainland China and traded on local exchanges. They are available to domestic and certain foreign investors, including QFIs and those participating in Stock Connect Programs like Shanghai-Hong Kong and Shenzhen-Hong Kong. Foreign investments in A-Shares face various regulations and restrictions, including limits on asset repatriation. A-Shares may experience frequent trading halts and illiquidity, which can lead to volatility in the Fund’s share price and increased trading halt risks. The Chinese economy is an emerging market, vulnerable to domestic and regional economic and political changes, often showing more volatility than developed markets. Companies face risks from potential government interventions, and the export-driven economy is sensitive to downturns in key trading partners, impacting the Fund. U.S.-China tensions raise concerns over tariffs and trade restrictions, which could harm China’s exports and the Fund. China’s regulatory standards are less stringent than in the U.S., resulting in limited information about issuers. Tax laws are unclear and subject to change, potentially impacting the Fund and leading to unexpected liabilities for foreign investors. Fluctuations in currency of foreign countries may have an adverse effect to domestic currency values. The Japanese economy depends heavily on international trade and is vulnerable to economic, political, and social instability, which could affect the Fund. The yen is volatile, influenced by fluctuations in Asia, and has historically shown unpredictable movements against the U.S. dollar. Natural disasters, such as earthquakes and tidal waves, also pose risks. Furthermore, government intervention and an unstable financial services sector can negatively impact the economy, which relies significantly on trade with developing nations in East and Southeast Asia. The Fund invests in non-U.S. securities, which can be less liquid and subject to weaker regulatory oversight compared to U.S. securities. Risks include currency fluctuations, political or economic instability, incomplete financial disclosure, and potential taxes or nationalization of holdings. Foreign trading hours and settlement processes may also limit the Fund’s ability to trade, and different accounting standards can add complexity. Suspensions of foreign securities may adversely impact the Fund, and delays in settlement or holidays may hinder asset liquidation, increasing the risk of loss. The Fund may invest in derivatives, which are often more volatile than other investments and may magnify the Fund’s gains or losses. A derivative (i.e., futures/forward contracts, swaps, and options) is a contract that derives its value from the performance of an underlying asset. The primary risk of derivatives is that changes in the asset’s market value and the derivative may not be proportionate, and some derivatives can have the potential for unlimited losses. Derivatives are also subject to liquidity and counterparty risk. The Fund is subject to liquidity risk, meaning that certain investments may become difficult to purchase or sell at a reasonable time and price. If a transaction for these securities is large, it may not be possible to initiate, which may cause the Fund to suffer losses. Counterparty risk is the risk of loss in the event that the counterparty to an agreement fails to make required payments or otherwise comply with the terms of the derivative. Large capitalization companies may struggle to adapt fast, impacting their growth compared to smaller firms, especially in expansive times. This could result in lower stock returns than investing in smaller and mid-sized companies. In addition to the normal risks associated with investing, investments in smaller companies typically exhibit higher volatility. A large number of shares of the Fund is held by a single shareholder or a small group of shareholders. Redemptions from these shareholder can harm Fund performance, especially in declining markets, leading to forced sales at disadvantageous prices, increased costs, and adverse tax effects for remaining shareholders. The Fund is new and does not yet have a significant number of shares outstanding. If the Fund does not grow in size, it will be at greater risk than larger funds of wider bid-ask spreads for its shares, trading at a greater premium or discount to NAV, liquidation and/or a trading halt. Narrowly focused investments typically exhibit higher volatility. The Fund’s assets are expected to be concentrated in a sector, industry, market, or group of concentrations to the extent that the Underlying Index has such concentrations. The securities or futures in that concentration could react similarly to market developments. Thus, the Fund is subject to loss due to adverse occurrences that affect that concentration. KOID is non-diversified. Neither MerQube, Inc. nor any of its affiliates (collectively, “MerQube”) is the issuer or producer of KOID and MerQube has no duties, responsibilities, or obligations to investors in KOID. The index underlying the KOID is a product of MerQube and has been licensed for use by Krane Funds Advisors, LLC and its affiliates. Such index is calculated using, among other things, market data or other information (“Input Data”) from one or more sources (each such source, a “Data Provider”). MerQube® is a registered trademark of MerQube, Inc. These trademarks have been licensed for certain purposes by Krane Funds Advisors, LLC and its affiliates in its capacity as the issuer of the KOID. KOID is not sponsored, endorsed, sold or promoted by MerQube, any Data Provider, or any other third party, and none of such parties make any representation regarding the advisability of investing in securities generally or in KOID particularly, nor do they have any liability for any errors, omissions, or interruptions of the Input Data, MerQube Global Humanoid and Embodied Intelligence Index, or any associated data. Neither MerQube nor the Data Providers make any representation or warranty, express or implied, to the owners of the shares of KOID or to any member of the public, of any kind, including regarding the ability of the MerQube Global Humanoid and Embodied Intelligence Index to track market performance or any asset class. The MerQube Global Humanoid and Embodied Intelligence Index is determined, composed and calculated by MerQube without regard to Krane Funds Advisors, LLC and its affiliates or the KOID. MerQube and Data Providers have no obligation to take the needs of Krane Funds Advisors, LLC and its affiliates or the owners of KOID into consideration in determining, composing or calculating the MerQube Global Humanoid and Embodied Intelligence Index. Neither MerQube nor any Data Provider is responsible for and have not participated in the determination of the prices or amount of KOID or the timing of the issuance or sale of KOID or in the determination or calculation of the equation by which KOID is to be converted into cash, surrendered or redeemed, as the case may be. MerQube and Data Providers have no obligation or liability in connection with the administration, marketing or trading of KOID. There is no assurance that investment products based on the MerQube Global Humanoid and Embodied Intelligence Index will accurately track index performance or provide positive investment returns. MerQube is not an investment advisor. Inclusion of a security within an index is not a recommendation by MerQube to buy, sell, or hold such security, nor is it considered to be investment advice. NEITHER MERQUBE NOR ANY OTHER DATA PROVIDER GUARANTEES THE ADEQUACY, ACCURACY, TIMELINESS AND/OR THE COMPLETENESS OF THE MERQUBE GLOBAL HUMANOID AND EMBODIED INTELLIGENCE INDEX OR ANY DATA RELATED THERETO (INCLUDING DATA INPUTS) OR ANY COMMUNICATION WITH RESPECT THERETO. NEITHER MERQUBE NOR ANY OTHER DATA PROVIDERS SHALL BE SUBJECT TO ANY DAMAGES OR LIABILITY FOR ANY ERRORS, OMISSIONS, OR DELAYS THEREIN. MERQUBE AND ITS DATA PROVIDERS MAKE NO EXPRESS OR IMPLIED WARRANTIES, AND THEY EXPRESSLY DISCLAIM ALL WARRANTIES, OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE OR USE OR AS TO RESULTS TO BE OBTAINED BY KRANE FUNDS ADVISORS, LLC AND ITS AFFILIATES, OWNERS OF THE KOID, OR ANY OTHER PERSON OR ENTITY FROM THE USE OF THE MERQUBE GLOBAL HUMANOID AND EMBODIED INTELLIGENCE INDEX OR WITH RESPECT TO ANY DATA RELATED THERETO. WITHOUT LIMITING ANY OF THE FOREGOING, IN NO EVENT WHATSOEVER SHALL MERQUBE OR DATA PROVIDERS BE LIABLE FOR ANY INDIRECT, SPECIAL, INCIDENTAL, PUNITIVE, OR CONSEQUENTIAL DAMAGES INCLUDING BUT NOT LIMITED TO, LOSS OF PROFITS, TRADING LOSSES, LOST TIME OR GOODWILL, EVEN IF THEY HAVE BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES, WHETHER IN CONTRACT, TORT, STRICT LIABILITY, OR OTHERWISE. THE FOREGOING REFERENCES TO “MERQUBE” AND/OR “DATA PROVIDER” SHALL BE CONSTRUED TO INCLUDE ANY AND ALL SERVICE PROVIDERS, CONTRACTORS, EMPLOYEES, AGENTS, AND AUTHORIZED REPRESENTATIVES OF THE REFERENCED PARTY. ETF shares are bought and sold on an exchange at market price (not NAV) and are not individually redeemed from the Fund. However, shares may be redeemed at NAV directly by certain authorized broker-dealers (Authorized Participants) in very large creation/redemption units. The returns shown do not represent the returns you would receive if you traded shares at other times. Shares may trade at a premium or discount to their NAV in the secondary market. Brokerage commissions will reduce returns. Beginning 12/23/2020, market price returns are based on the official closing price of an ETF share or, if the official closing price isn't available, the midpoint between the national best bid and national best offer ("NBBO") as of the time the ETF calculates the current NAV per share. Prior to that date, market price returns were based on the midpoint between the Bid and Ask price. NAVs are calculated using prices as of 4:00 PM Eastern Time. The KraneShares ETFs and KFA Funds ETFs are distributed by SEI Investments Distribution Company (SIDCO), 1 Freedom Valley Drive, Oaks, PA 19456, which is not affiliated with Krane Funds Advisors, LLC, the Investment Adviser for the Funds, or any sub-advisers for the Funds. Copyright © 2025 Insider Inc and finanzen.net GmbH (Imprint). All rights reserved. Registration on or use of this site constitutes acceptance of our Terms of Service and Privacy Policy.
Images (1): 
|
|||||
| Dreame’s new floor washers show embodied intelligence entering homes first … | https://kr-asia.com/dreames-new-floor-w… | 1 | Jan 04, 2026 16:00 | active | |
Dreame’s new floor washers show embodied intelligence entering homes first through appliancesDescription: While humanoid robots remain the holy grail, companies like Dreame are tapping AI to enhance a wide range of household devices. Content:
Written by 36Kr English Published on 16 Sep 2025 5 mins read When competition over specifications in home appliances reaches a bottleneck, artificial intelligence may be the factor that breaks the deadlock while making products more user-friendly. At its latest launch event, Dreame introduced more than 30 new products, with two floor washers drawing the most attention. Each features a pair of robotic arms that can self-clean edges and scrub floors as users push the machine. “In recent years, the floor washer segment has focused too much on pushing parameters to the extreme, but that doesn’t necessarily solve users’ real pain points, such as stubborn stains or cleaning low spaces,” said Wang Hongpin, head of product and R&D for Dreame’s floor washer division in China. Increasing suction power does not always improve cleaning results. Higher power can also create more noise and shorten battery life. By contrast, AI introduces new functionality through environmental sensing, user intent recognition, and action decision-making, enabling floor washers to address problems that were previously unresolved. This may represent a stepping stone. Before humanoid robots enter households, AI-enabled appliances with basic embodied intelligence are already easing housework. The concept extends beyond floor washers. Dreame’s new lineup now includes refrigerators, air conditioners, and televisions, signaling its ambition to expand beyond cleaning devices and position itself as a full-fledged home appliance company. From large appliances such as refrigerators to smaller items like hair dryers and smart rings, AI integration is a recurring theme. Dreame also disclosed for the first time that it plans to launch its own smart glasses and is exploring companion robots. Pan Zhidong, head of Dreame’s AI smart hardware division, said in an interview that the company intends to use smart rings and glasses as entry points to connect all its products. According to his vision, Dreame’s smart home ecosystem will expand outward from cleaning appliances to automotive applications, with AI-driven hardware serving more aspects of daily life. The clearest examples of Dreame’s AI integration are the two new floor washers with robotic arms. The T60 Ultra and H60 Ultra each feature two robotic arms designed for scrubbing. The front arm uses a flexible scraper to clear watermarks and dirt along edges, while the rear arm applies pressure to tackle stubborn stains. As users push the washer forward, the AI-controlled arms perform in tandem. One acts more softly than the other, like a pair of helping hands. This directly addresses pain points that traditional floor washers have long left unresolved. In recent years, the industry has been locked in a race to maximize specifications—stronger suction, higher water output, more powerful motors. Yet these boosts have had limited effect on edge cleaning and narrow gaps. To address this, the T60 and H60 incorporate embodied intelligence. Under AI control, the robotic arms can sense the environment and make real-time decisions. The washers detect floor dirt levels through high-precision sensors and magnetic rings. Once stains are identified, AI adjusts suction and water output. If stains prove difficult to remove, the machine alerts users with lights and sounds, suggesting manual use of steam or hot water modes. Acting as the “brain,” the AI system orchestrates the machine’s actions, controlling arm movements based on whether the device is advancing or reversing. “The floor washer market is in a fiercely competitive state, with each player choosing its own angle. Dreame hopes to solve user pain points more effectively through embodied intelligence,” Wang said. He added that the goal is to give machines more efficient and thorough cleaning capabilities, while also making them flexible enough to reach under furniture and scrub tough stains. The AI-first approach extends to other Dreame products. Its new hair dryer can detect its distance from hair and automatically adjust airflow and temperature. The company’s latest refrigerator uses built-in models to monitor and regulate oxygen levels, while also sterilizing compartments to preserve freshness. Another highlight is Dreame’s smart ring, which serves as a control point for smart home devices and tracks health metrics. It is designed to connect with Dreame’s upcoming car and other outdoor devices as well. Underlying these products is a consistent logic: as traditional hardware upgrades in home appliances yield diminishing returns, AI can create new space for innovation. According to All View Cloud (AVC), the market for cleaning appliances such as floor washers and robot vacuums has been expanding rapidly. Cumulative sales reached RMB 22.4 billion (USD 3.1 billion), up 30% year-on-year (YoY), with unit sales of 16.55 million, an increase of 22.1%. Growing sales have attracted more entrants. On August 6, 2025, DJI released its Romo robot vacuum, marking its crossover into smart home cleaning and further intensifying competition. Yet profit growth has not kept pace with sales. In 2024, Ecovacs Robotics reported net profit of RMB 806 million (USD 112.8 million), less than half its 2021 peak. Roborock’s 2024 revenue rose 38% YoY, but its net profit slipped 3.6%. Both companies attributed pressure on earnings to price wars and heightened competition. Some in the industry see AI as a potential way out of this cycle. Earlier this year, Roborock introduced what it described as the world’s first mass-produced bionic hand vacuum cleaner, which can sweep floors while also picking up small items. AI enables the device to recognize objects and calculate the best way to grasp them, improving collection accuracy. Dreame’s floor washers follow a similar principle, identifying stains with AI and adapting cleaning modes on the fly. Whether it is a vacuum that automatically lends a hand when it senses dirt or a hair dryer that adjusts heat based on hair condition, today’s AI appliances are not trying to mimic humanoid robots. Instead, they apply embodied intelligence in targeted ways to solve specific household tasks. This could mark a transitional stage for embodied intelligence, offering a practical route for deployment in everyday life. Wang believes advances in smart technology will expand opportunities for floor washers. “With embodied intelligence and robotic arms, floor washers now have eyes, a brain, and hands. In the future, consumers may only need to push the machine casually around their homes, while it autonomously adjusts to different scenarios and completes the job,” he said. Beyond its latest launches, Dreame plans to release smart glasses in the first quarter of 2026, along with companion robots, though details have not yet been confirmed. KrASIA Connection features translated and adapted content that was originally published by 36Kr. This article was written by Fu Chong for 36Kr. Loading... Subscribe to our newsletters KrASIA A digital media company reporting on China's tech and business pulse.
Images (1): 
|
|||||
| Title: The Future of Artificial Intelligence in 2025: Trends, Challenges … | https://medium.com/@mashirosenpai0/titl… | 0 | Jan 04, 2026 16:00 | active | |
Title: The Future of Artificial Intelligence in 2025: Trends, Challenges & OpportunitiesDescription: Title: The Future of Artificial Intelligence in 2025: Trends, Challenges & Opportunities Meta Description: Explore the latest trends and challenges of Artificia... Content: |
|||||
| The Future is Here: Embodied Intelligent Robots | https://www.manilatimes.net/2025/07/30/… | 0 | Jan 04, 2026 16:00 | active | |
The Future is Here: Embodied Intelligent RobotsDescription: BEIJING, July 30, 2025 /PRNewswire/ -- A news report from en.qstheory.cn: Content: |
|||||
| World's largest embodied AI data factory opens in Tianjin | http://www.ecns.cn/news/cns-wire/2025-0… | 1 | Jan 04, 2026 16:00 | active | |
World's largest embodied AI data factory opens in TianjinURL: http://www.ecns.cn/news/cns-wire/2025-06-24/detail-ihestqxv5318579.shtml Content:
(ECNS) -- The world's largest embodied artificial intelligence data facility, Pacini Perception Technology's Super Embodied Intelligence Data (Super EID) Factory, officially opened in Tianjin Municipality on Tuesday. Spanning 12,000 square meters, the facility is the world's leading base for embodied AI data collection and model training. Equipped with 150 data units developed in-house, it is expected to produce nearly 200 million high-quality AI training samples annually. The base features a "15+N" full-scenario matrix system encompassing thousands of task scenarios across automotive manufacturing, 3C (computer, communication, and consumer electronics) product assembly, household, office, and food service environments. Xu Jincheng, Pacini's CEO and founder, explained that the facility's core technology utilizes synchronized high-precision capture of human hand movements combined with visual-tactile modality alignment. This means the data samples combine 3D vision and touch-sensing, allowing robots to better mimic human interaction. The approach overcomes traditional robotics-dependent data collection limitations and dramatically improves data versatility, Xu said. The facility will not only serve as a data hub but also evolve into an innovation engine for the embodied AI industry, the CEO added. China has produced nearly 100 embodied AI robotic products since 2024, capturing 70% of the global market, according to data released by the Ministry of Industry and Information Technology in April. According to a report from Head Leopard Shanghai Research Institute, China's embodied AI market size reached 418.6 billion yuan ($58 billion) in 2023 and is expected to reach 632.8 billion yuan by 2027, driven by breakthroughs in AI technology, the Securities Daily reported. (By Zhang Dongfang)
Images (1): 
|
|||||
| SenseTime deepens its push into embodied intelligence with ACE Robotics | https://kr-asia.com/sensetime-deepens-i… | 1 | Jan 04, 2026 16:00 | active | |
SenseTime deepens its push into embodied intelligence with ACE RoboticsURL: https://kr-asia.com/sensetime-deepens-its-push-into-embodied-intelligence-with-ace-robotics Description: Wang Xiaogang explains what the new robotics venture means for SenseTime’s AI plans. Content:
Written by 36Kr English Published on 22 Dec 2025 8 mins read In China’s artificial intelligence sector, SenseTime has long stood as one of the most enduring players, well over a decade old and well-acquainted with the cyclical tides of technological change. During the rise of visual AI, the company emerged from a research lab at The Chinese University of Hong Kong to become one of the first to commercialize computer vision at scale. Yet B2B operations have never been easy. Like many peers, SenseTime often faced clients with highly customized needs and long development cycles. Then came OpenAI’s ChatGPT, which reshaped the industry around large language models. Leveraging its early lead in computing infrastructure, SenseTime found new momentum. According to its 2024 annual report, the company’s generative AI business brought in RMB 2.4 billion (USD 336 million) in revenue, rising from 34.8% of total income in 2023 to 63.7%, making it SenseTime’s most critical business line. But after three years of rapid progress in large models, a more pragmatic question looms: beyond narrow applications, how can AI enter the physical world and become a practical force that truly changes how we work and live? That question lies at the center of SenseTime’s next chapter. As embodied intelligence emerges as the next frontier, a new company has joined the race. ACE Robotics, led by Wang Xiaogang, SenseTime’s co-founder and executive director, has officially stepped into the field. Wang now serves as ACE Robotics’ chairman. In an interview with 36Kr, Wang said ACE Robotics was not born from hype but from necessity. It aims to address real-world pain points through a new human-centric research paradigm, focusing on building a “brain” that understands the laws of the physical world and to deliver integrated hardware-software products for real-world use. This direction reflects a broader shift across the industry. A year ago, embodied intelligence firms were still experimenting with mobility and stability. Today, some have secured contracts worth hundreds of millions of RMB, bringing robots into factories in Shenzhen, Shanghai, and Suzhou. AI’s shift toward physical intelligence carries major significance, especially as the industry faces growing pressure to deliver real returns. In the first half of 2025, SenseTime reported a net loss of RMB 1.162 billion (USD 163 million), a 50% year-on-year decrease, even as its R&D spending continued to rise. The company is now pursuing more grounded, sustainable paths to growth. The breakthrough, Wang said, will not come from a leap toward artificial general intelligence (AGI), but from robots that can learn reusable skills through real-world interaction and solve tangible physical problems. The following transcript has been edited and consolidated for brevity and clarity. Wang Xiaogang (WX): The decision stems from two considerations: industrialization and technological paradigm. From an industrial perspective, embodied intelligence represents a market worth tens of trillions of RMB. As Nvidia founder Jensen Huang has said, one day everyone may own one or more robots. Their numbers could exceed smartphones, and their unit value could rival that of automobiles. For SenseTime, which has historically focused on B2B software, expanding into integrated hardware-software operations is a natural step toward scale. Years of working with vertical industries have given us a deep understanding of user pain points. Compared with many embodied AI startups that lack this context, our ability to deploy in real-world scenarios gives us an edge in commercialization. From a technical perspective, traditional embodied intelligence has a key weakness. Hardware has advanced quickly, but the “brain” has lagged behind because most approaches are machine-centric. They start with a robot’s form, train a general model on data from that specific body, and assume it can generalize. But it can’t. Just as humans and animals can’t share one brain, robots with different morphologies—whether with dexterous hands, claws, or multiple arms—cannot share a universal model. WX: We’re proposing a new, human-centric paradigm. We begin by studying how humans interact with the physical world, essentially how we move, grasp, and manipulate. Using wearable devices and third-person cameras, we collect multimodal data, including vision, touch, and force, to record complex, commonsense human behaviors. By feeding this data into a world model, we enable it to understand both physics and human behavioral logic. A mature world model can even guide hardware design, ensuring that a robot’s form naturally fits its intended environment. In recent months, companies such as Tesla and Figure AI have pivoted toward first-person camera-based learning. But these approaches capture only visual information, without integrating critical signals like force, touch, and friction—the keys to genuine multidimensional interaction. Vision alone may let a robot dance or shadowbox, but it still struggles with real contact tasks like moving a bottle or tightening a screw. Our human-centric approach has already been validated. A team led by professor Liu Ziwei developed the EgoLife dataset, containing over 300 hours of first- and third-person human activity data. Models trained on this dataset have overcome the industry’s pain point, whereas most existing datasets capture only trivial actions, insufficient for complex motion learning. WX: Our goal is not merely to build models but to deliver integrated hardware-software products that solve real problems in defined scenarios. We’ve found that much existing hardware doesn’t match real-world needs. So we work closely with partners on customized designs. Take quadruped robots: traditional models mount cameras too low and narrow, making it difficult to detect traffic lights or navigate intersections. In partnership with Insta360, we developed a panoramic camera module with 360-degree coverage, solving that limitation. We’re also tackling issues like waterproofing, high computing costs, and limited battery life, which are key obstacles to outdoor and industrial deployment. WX: Our strength lies in the “brain,” which represents models, navigation, and operation capabilities. Previously, SenseTime specialized in large-scale software systems but had no standardized edge products. Through prior investments in hardware and component makers, ACE Robotics now follows an ecosystem model. We define design standards, co-develop hardware with partners, and keep our model layer open, offering base models and training resources. WX: R&D systems and safety standards are two key areas. Both autonomous driving and robotics rely on massive datasets for continuous improvement. The validated “data flywheels” we’ve built significantly boost iteration speed. Meanwhile, the rigorous safety and data-quality frameworks from autonomous driving can directly enhance robotics reliability. On the functional side, our SenseFoundry platform already includes hundreds of modules originally built for fixed-camera city management. When linked to mobile robots, these capabilities transfer seamlessly, extending from static monitoring to dynamic mobility. WX: SenseTime’s path traces AI’s own progression from version 1.0 to 3.0. In 2014, we were in the AI 1.0 era, defined by visual recognition. Machines began to outperform the human eye, but intelligence came from manual labeling: tagging images to simulate cognition. Because labeled data was limited and task-specific, each application required its own dataset. Intelligence was only as strong as the amount of human labor behind it. Models were small and lacked generalization across scenarios. Then came the 2.0 era of large models, which transformed everything. The key difference was data richness. The internet’s texts, poems, and code embody centuries of human knowledge, far more diverse than labeled images. Large models learned from this collective intelligence, allowing them to generalize across industries and domains. But as online data becomes saturated, the marginal gains from this approach are slowing. We are now entering the AI 3.0 era of embodied intelligence, defined by direct interaction with the physical world. To truly understand physics and human behavior, reading text and images is no longer enough. AI must engage with the world. Tasks such as cleaning a room or delivering a package demand real-time, adaptive intelligence. Through direct interaction, AI can overcome the limits of existing data and open new pathways for growth. WX: Kairos 3.0 consists of three components: multimodal understanding and fusion, a synthetic network, and behavioral prediction. The first fuses diverse inputs, including not just images, videos, and text, but also camera poses, 3D object trajectories, and tactile or force data. This enables the model to grasp the real-world physics behind movement and interaction. In collaboration with Nanyang Technological University, for example, the model can infer camera poses from a single image. When a robotic arm captures a frame, the model can deduce the arm’s position and predict its motion from visual changes, deepening its understanding of physical interaction. The second component, the synthetic network, can generate videos of robots performing various manipulation tasks, swapping robot types, or altering environmental elements such as objects, tools, or room layouts. The third, behavioral prediction, enables the model to anticipate a robot’s next move after receiving an instruction, bridging cognition and execution into a complete loop from understanding to action. WX: It combines environmental data collection with world modeling. By “environment,” we mean real human living and working spaces. Unlike autonomous driving, which focuses narrowly on roads, or underwater robotics, we model how humans interact with their surroundings. This yields higher data efficiency and more authentic inputs. We also integrate human ergonomics, touch, and force, which are all essential for rapid learning, and all missing in machine-centric paths. WX: The first large-scale applications will emerge in quadruped robots, or robotic dogs. Most current quadruped bots still rely on remote control or preset routes. Our system gives them autonomous navigation and spatial intelligence. Equipped with ACE Robotics’ navigation technology, they can coordinate through a control platform, follow Baidu Maps commands, and respond to multimodal or voice inputs. They can identify people in need, record license plates, and detect anomalies. Linked with our SenseFoundry vision platform, these robots can recognize fights, garbage accumulation, unleashed pets, or unauthorized drones, sending real-time data back to control centers. This combination, supported by cloud-based management, will soon scale in inspection and monitoring. Within one to two years, we expect widespread deployment in industrial environments. WX: In the medium term, warehouse logistics will likely be the next major commercialization frontier. Unlike factories, warehouses share consistent operational patterns. As online shopping expands, front-end logistics hubs require standardized automation for sorting and packaging. Traditional robot data collection cannot handle the enormous variety of SKUs, but large-scale environmental data allows our models to generalize and scale efficiently. In the long term, home environments will be the next key direction, though safety remains a major challenge. Household robots must manage collisions and ensure object safety, much like autonomous driving must evolve from Level 2 to Level 4 autonomy. Progress is being made. Figure AI, for instance, is partnering with real estate funds managing millions of apartment layouts to gather environmental data, gradually moving embodied intelligence closer to the home. KrASIA Connection features translated and adapted content that was originally published by 36Kr. This article was written by Huang Nan for 36Kr. Loading... Subscribe to our newsletters KrASIA A digital media company reporting on China's tech and business pulse.
Images (1): 
|
|||||
| China's Top Universities Plan to Roll Out New Major to … | https://www.businessinsider.com/china-e… | 1 | Jan 04, 2026 16:00 | active | |
China's Top Universities Plan to Roll Out New Major to Boost Robotics - Business InsiderDescription: Seven Chinese universities plan to launch an "embodied intelligence" major as Beijing races to build a pipeline of robotics and AI talent. Content:
Every time Lee Chong Ming publishes a story, you’ll get an alert straight to your inbox! Enter your email By clicking “Sign up”, you agree to receive emails from Business Insider. In addition, you accept Insider’s Terms of Service and Privacy Policy. China wants more robotics talent. The country's elite universities are preparing to launch a new undergraduate major in "embodied intelligence," an emerging field that combines AI with robotics. Seven universities — including Shanghai Jiao Tong University, Zhejiang University, Beijing Institute of Technology, and Xi'an Jiaotong University — have applied to offer the new major, according to a public notice published in November by China's Ministry of Education. These schools sit at the top of the country's engineering and computer-science ecosystem, and several are part of the C9 League, China's equivalent of the Ivy League. Zhejiang University, located in eastern China, is the alma mater of DeepSeek's founder and a growing roster of AI startup leaders. The ministry said the major is being introduced to meet national demand for talent in "future industries" such as embodied intelligence, quantum technology, and next-generation communications. Every time Lee Chong Ming publishes a story, you’ll get an alert straight to your inbox! Stay connected to Lee Chong Ming and get more of their work as it publishes. By clicking “Sign up”, you agree to receive emails from Business Insider. In addition, you accept Insider's Terms of Service and Privacy Policy. In a June notice, the ministry said that universities should "optimize program offerings based on national strategies, market demands, and technological development." China's embodied intelligence industry is expected to take off. This year, the market could reach 5.3 billion yuan, or $750 million, according to a report republished by the Cyberspace Administration of China. By 2030, it could hit 400 billion yuan and surpass 1 trillion yuan in 2035, according to a report from the Development Research Center of the State Council. The Beijing Institute of Technology said in its application document that the industry has a shortfall of about one million embodied intelligence professionals. If adopted, the major would become one of China's newest additions to its higher-education system. Beijing's push into AI and robotics has been underway for a while. Shanghai Jiao Tong University already runs a "Machine Vision and Intelligence Group" under its School of Artificial Intelligence. Zhejiang University has also set up a "Humanoid Robot Innovation Research Institute," dedicated to "developing humanoid robots that exceed human capabilities in movement and manipulation." The Chinese tech industry is moving just as quickly. Chinese companies specializing in humanoid robots and autonomous systems have been racing to keep pace with global competitors. In September, Ant Group, an affiliate company of the Chinese conglomerate Alibaba Group, unveiled R1, a humanoid robot that has drawn comparisons to Tesla's Optimus. In the US, some universities already offer courses and labs for robotics and AI, including Stanford, Carnegie Mellon, and New York University. China's proposed "embodied intelligence" major is designed with job opportunities in mind. At the Beijing Institute of Technology, the school plans to enroll 120 undergraduates in the program a year, with 70 expected to continue into graduate programs and 50 headed straight into the workforce, according to its application document. The university's filing sketches out where those students are likely to go. State-owned giants like Norinco and the China Aerospace Science and Technology Corporation are expected to take more than a dozen graduates, while others are projected to join major tech players, including Huawei, Alibaba, Tencent, ByteDance, Xiaomi, and BYD. The major includes courses such as multimodal perception and fusion, embodied human-robot interaction, and machine learning for robotics, according to the university's filing. Jump to
Images (1): 
|
|||||
| The Heat: Artificial Intelligence | https://america.cgtn.com/2024/12/10/the… | 0 | Jan 04, 2026 16:00 | active | |
The Heat: Artificial IntelligenceURL: https://america.cgtn.com/2024/12/10/the-heat-artificial-intelligence-4 Description: In 2024, technology took a gigantic leap forward, especially with artificial intelligence. These rapid advancements prompted governments and industry leaders to... Content: |
|||||
| Li Auto’s former CTO launches embodied intelligence startup with USD … | https://kr-asia.com/li-autos-former-cto… | 1 | Jan 04, 2026 16:00 | active | |
Li Auto’s former CTO launches embodied intelligence startup with USD 50 million backingDescription: The venture marks the latest move by automotive industry leaders into robotics. Content:
Written by 36Kr English Published on 22 Sep 2025 2 mins read Wang Kai, investment partner at Vision Plus Capital and former CTO of Li Auto, has reportedly launched a startup in embodied intelligence. A senior executive responsible for assisted driving technology at a major automaker has also joined the project and is currently on leave from the company. According to 36Kr, the startup has attracted strong investor interest. Within months of its founding, it secured about USD 50 million across two funding rounds. Vision Plus Capital led the first, while HongShan and Lanchi Ventures backed the second. The team’s track record in artificial intelligence and large-scale engineering is seen as a key factor in drawing support, in addition to growing interest in embodied intelligence. Wang joined Li Auto in September 2020 as CTO, where he oversaw R&D and mass production of intelligent vehicle systems, covering electronic and electrical architecture, smart cockpits, autonomous driving, platform development, and real-time operating systems. Before Li Auto, he spent eight years at Visteon, where he was the founding designer of DriveCore, the company’s assisted driving platform. He led five mass production projects spanning chips, algorithms, operating systems, and hardware architecture. At Li Auto, Wang accelerated the rollout of assisted driving solutions, reaching mass production in just seven months. He left the company in early 2022 to become an investment partner at Vision Plus Capital, a role he continues to hold. In venture capital, however, such positions often function more as advisory roles rather than full-time operational posts. The senior executive who joined him at the startup brings rare experience in end-to-end mass deployment, including work on vision-language-action (VLA) systems. Such expertise remains unusual among embodied intelligence ventures. Beyond assisted driving, embodied intelligence has emerged as a key application area for AI, attracting talent from the autonomous driving sector and drawing significant funding. In March, for example, Tars, another embodied intelligence startup, raised USD 120 million in an angel round just 50 days after its founding, representing the largest angel investment in the segment in China. Like Wang’s venture, Tars was founded by an executive with autonomous driving experience, Chen Yilun. Automotives are often described as “robots without hands.” With autonomous driving and embodied intelligence closely aligned, carmakers such as Tesla and Xpeng see the field as their next growth frontier. Many automotive executives are also choosing it as their path to entrepreneurship. Before Wang, others, including Yu Yinan, a former vice president at Horizon Robotics, and Gao Jiyang, who previously led mass production R&D at Momenta, had already launched startups in embodied intelligence. Automakers are racing ahead in assisted driving technology. Huawei, for instance, has announced that its computing power investment in the field has reached 45 exaflops. Meanwhile, capital is pouring into embodied intelligence as well. Competition for top talent between the two segments is set to continue. KrASIA Connection features translated and adapted content that was originally published by 36Kr. This article was written by Fan Shuqi for 36Kr. Loading... Subscribe to our newsletters KrASIA A digital media company reporting on China's tech and business pulse.
Images (1): 
|
|||||
| Embodied Artificial Intelligence is the Next Frontier of Human-Centered Innovation … | https://bradenkelley.com/2025/12/embodi… | 1 | Jan 04, 2026 16:00 | active | |
Embodied Artificial Intelligence is the Next Frontier of Human-Centered Innovation | Human-Centered Change and InnovationDescription: Braden Kelley is a popular innovation keynote speaker creating workshops, masterclasses, webinars, tools, and training for organizations on innovation, design thinking and change management. Content:
LAST UPDATED: December 8, 2025 at 4:56 PM GUEST POST from Art Inteligencia For the last decade, Artificial Intelligence (AI) has lived primarily on our screens and in the cloud — a brain without a body. While large language models (LLMs) and predictive algorithms have revolutionized data analysis, they have done little to change the physical experience of work, commerce, and daily life. This is the innovation chasm we must now bridge. The next great technological leap is Embodied Artificial Intelligence (EAI): the convergence of advanced robotics (the body) and complex, generalized AI (the brain). EAI systems are designed not just to process information, but to operate autonomously and intelligently within our physical world. This is a profound shift for Human-Centered Innovation, because EAI promises to eliminate the drudgery, danger, and limitations of physical labor, allowing humans to focus exclusively on tasks that require judgment, creativity, and empathy. The strategic deployment of EAI requires a shift in mindset: organizations must view these agents not as mechanical replacements, but as co-creators that augment and elevate the human experience. The most successful businesses will be those that unlearn the idea of human vs. machine and embrace the model of Human-Embodied AI Symbiosis. EAI accelerates change by enabling three crucial shifts in how we organize work and society: Traditional automation replaces repetitive tasks. EAI offers intelligent augmentation. Because EAI agents learn and adapt in real-time within dynamic environments (like a factory floor or a hospital), they can handle unforeseen situations that script-based robots cannot. This means the human partner moves from supervising a simple process to managing the exceptions and optimizations of a sophisticated one. The human job becomes about maximizing the intelligence of the system, not the efficiency of the body. Many essential human jobs are physically demanding, dangerous, or profoundly repetitive. EAI offers a path to remove humans from these undignified roles — the loading and unloading of heavy boxes, inspection of hazardous infrastructure, or the constant repetition of simple assembly tasks. This frees human capital for high-value interaction, fostering a new organizational focus on the dignity of work. Organizations committed to Human-Centered Innovation must prioritize the use of EAI to eliminate physical risk and strain. For decades, digital transformation has been the focus. EAI catalyzes the necessary physical transformation. It closes the loop between software and reality. An inventory algorithm that predicts demand can now direct a bipedal robot to immediately retrieve and prepare the required product from a highly chaotic warehouse shelf. This real-time, physical execution based on abstract computation is the true meaning of operational innovation. A global energy corporation (“PowerLine”) faced immense risk and cost in maintaining high-voltage power lines, oil pipelines, and sub-sea infrastructure. These tasks required sending human crews into dangerous, often remote, or confined spaces for time-consuming, repetitive visual inspections. PowerLine deployed a fleet of autonomous, multi-limbed EAI agents equipped with advanced sensing and thermal imaging capabilities. These robots were trained not just on pre-programmed routes, but on the accumulated, historical data of human inspectors, learning to spot subtle signs of material stress and structural failure — a skill previously reserved for highly experienced humans. The use of EAI led to a 70% reduction in inspection time and, critically, a near-zero rate of human exposure to high-risk environments. This strategic pivot proved that EAI’s greatest value is not economic replacement, but human safety and strategic focus. The EAI provided a foundational layer of reliable, granular data, enabling human judgment to be applied only where it mattered most. A national assisted living provider (“ElderCare”) struggled with caregiver burnout and increasing costs, while many residents suffered from emotional isolation due to limited staff availability. The challenge was profoundly human-centered: how to provide dignity and aid without limitless human resources. ElderCare piloted the use of adaptive, humanoid EAI companions in low-acuity environments. These agents were programmed to handle simple, repetitive physical tasks (retrieving dropped items, fetching water, reminding patients about medication) and, critically, were trained on empathetic conversation models. The pilot resulted in a 30% reduction in nurse burnout and, most importantly, a measurable increase in resident satisfaction and self-reported emotional well-being. The EAI was deployed not to replace the human touch, but to protect and maximize its quality by taking on the physical burden of routine care. The innovation successfully focused human empathy where it had the greatest impact. The race to commercialize EAI is accelerating, driven by the realization that AI needs a body to unlock its full economic potential. Organizations should be keenly aware of the leaders in this ecosystem. Companies like Boston Dynamics, known for advanced mobility and dexterity, are pioneering the physical platforms. Startups such as Sanctuary AI and Figure AI are focused on creating general-purpose humanoid robots capable of performing diverse tasks in unstructured environments, integrating advanced large language and vision models into physical forms. Simultaneously, major players like Tesla with its Optimus project and research divisions within Google DeepMind are laying the foundational AI models necessary for EAI agents to learn and adapt autonomously. The most promising developments are happening at the intersection of sophisticated hardware (the actuators and sensors) and generalized, real-time control software (the brain). Embodied AI is not just another technology trend; it is the catalyst for a radical change in the operating model of human civilization. Leaders must stop viewing EAI deployment as a simple capital expenditure and start treating it as a Human-Centered Innovation project. Your strategy should be defined by the question: How can EAI liberate my best people to do their best, most human work? Embrace the complexity, manage the change, and utilize the EAI revolution to drive unprecedented levels of dignity, safety, and innovation. “The future of work is not AI replacing humans; it is EAI eliminating the tasks that prevent humans from being fully human.” Traditional industrial robots are fixed, single-purpose machines programmed to perform highly repetitive tasks in controlled environments. Embodied AI agents are mobile, often bipedal or multi-limbed, and are powered by generalized AI models, allowing them to learn, adapt, and perform complex, varied tasks in unstructured, human environments. The opportunity is the elimination of the “3 Ds” of labor: Dangerous, Dull, and Dirty. By transferring these physical burdens to EAI agents, organizations can reallocate human workers to roles requiring social intelligence, complex problem-solving, emotional judgment, and creative innovation, thereby increasing the dignity and strategic value of the human workforce. Symbiosis refers to the collaborative operating model where EAI agents manage the physical execution and data collection of routine, complex tasks, while human professionals provide oversight, set strategic goals, manage exceptions, and interpret the resulting data. The systems work together to achieve an outcome that neither could achieve efficiently alone. Your first step toward embracing Embodied AI: Identify the single most physically demanding or dangerous task in your organization that is currently performed by a human. Begin a Human-Centered Design project to fully map the procedural and emotional friction points of that task, then use those insights to define the minimum viable product (MVP) requirements for an EAI agent that can eliminate that task entirely. UPDATE – Here is an infographic of the key points of this article that you can download: Disclaimer: This article speculates on the potential future applications of cutting-edge scientific research. While based on current scientific understanding, the practical realization of these concepts may vary in timeline and feasibility and are subject to ongoing research and development. Image credit: 1 of 1,000+ quote slides for your meetings & presentations at http://misterinnovation.com Sign up here to get Human-Centered Change & Innovation Weekly delivered to your inbox every week. Art Inteligencia is the lead futurist at Inteligencia Ltd. He is passionate about content creation and thinks about it as more science than art. Art travels the world at the speed of light, over mountains and under oceans. His favorite numbers are one and zero. Content Authenticity Statement: If it wasn't clear, any articles under Art's byline have been written by OpenAI Playground or Gemini using Braden Kelley and public content as inspiration. Your email address will not be published. Required fields are marked * Comment * Name * Email * Website Save my name, email, and website in this browser for the next time I comment. Δ (View the latest example)
Images (1): 
|
|||||
| Artificial Embodied Intelligence and Machine Fidelity | https://medium.com/@michaelxfutol/artif… | 0 | Jan 04, 2026 16:00 | active | |
Artificial Embodied Intelligence and Machine FidelityURL: https://medium.com/@michaelxfutol/artificial-embodied-intelligence-and-machine-fidelity-f0285ab2ed1a Description: Artificial Embodied Intelligence and Machine Fidelity Artificial intelligence began as a dream of replication — of thought without flesh, logic without breath... Content: |
|||||
| NVIDIA Advances Robotics Development at CoRL 2025 with New Models, … | https://www.storagereview.com/news/nvid… | 1 | Jan 04, 2026 08:00 | active | |
NVIDIA Advances Robotics Development at CoRL 2025 with New Models, Systems, and Simulation Tools - StorageReview.comDescription: NVIDIA addresses challenges in robotic manipulation and announces advanced robotic learning tools at the Conference on Robotic Learning. Content:
Home » News » NVIDIA Advances Robotics Development at CoRL 2025 with New Models, Systems, and Simulation Tools NVIDIA is using the stage at the Conference on Robot Learning (CoRL) in Korea to showcase its most ambitious advances in robotic learning to date. The company is highlighting a suite of open models, powerful new computer platforms, and simulation engines that aim to close the gap between robotic research and real-world deployment. At the center of NVIDIA’s announcements are mobility and manipulation challenges, two of the most complex hurdles in robotics. By fusing AI-driven reasoning, advanced physics simulation, and domain-specific compute platforms, NVIDIA aims to accelerate the entire lifecycle of robotic development, from early R&D and simulation to training and, ultimately, deployment in physical environments. NVIDIA introduced DreamGen and Nerd, two open foundation models designed specifically for robotic learning. By releasing these models openly, NVIDIA is reinforcing its commitment to collaborative robotics research, lowering the barrier to entry for labs and startups, and ensuring reproducibility across the academic and industrial landscapes. These models can plug directly into Isaac robotics frameworks, streamlining experimentation and deployment. NVIDIA also announced three new computing systems optimized for each stage of robotics development: Omniverse with Cosmos on RTX Pro (Simulation) NVIDIA DGX (Training) NVIDIA Jetson AGX Thor (Deployment) Newton Physics Engine, first announced at GTC 2025, was developed in collaboration with Disney Research and Google DeepMind. NVIDIA also showcased the continued evolution of its Groot model family for robotic reasoning, advancing from Groot N1.5 (announced in May) to Groot N1.6. These models are tuned for “human-like” planning, reasoning, and task decomposition, enabling robots to break down complex tasks into executable steps, much like a human operator would. NVIDIA highlighted how its new Blackwell GPU architecture is enabling real-time reasoning in robotics. NVIDIA’s robotics push is significant not only for the breadth of tools being introduced but also for how tightly integrated the ecosystem has become. The advancements include: As mobility and manipulation remain challenging, NVIDIA’s unified approach, combining open research models, physics-accurate simulation, and deployment-ready compute, positions it as a central force in accelerating robotic autonomy. Engage with StorageReview Newsletter | YouTube | Podcast iTunes/Spotify | Instagram | Twitter | TikTok | RSS Feed I have been in the tech industry since IBM created Selectric. My background, though, is writing. So I decided to get out of the pre-sales biz and return to my roots, doing a bit of writing but still being involved in technology. Previous post: Pure Storage Expands Platform Capabilities for AI Efficiency and Cyber Resilience Next post: AMD Expands Global Collaboration with Cohere to Accelerate Enterprise AI Adoption Trusted Vendors Products and solutions from our affiliate partners: Newsletter Subscribe to the StorageReview newsletter to stay up to date on the latest news and reviews. We promise no spam! 1 Leave this field empty if you’re human: Content Categories Copyright © 1998-2025 Flying Pig Ventures, LLC Cincinnati, Ohio. All rights reserved. To provide the best experiences, we and our partners use technologies like cookies to store and/or access device information. Consenting to these technologies will allow us and our partners to process personal data such as browsing behavior or unique IDs on this site and show (non-) personalized ads. Not consenting or withdrawing consent, may adversely affect certain features and functions. Click below to consent to the above or make granular choices. Your choices will be applied to this site only. You can change your settings at any time, including withdrawing your consent, by using the toggles on the Cookie Policy, or by clicking on the manage consent button at the bottom of the screen.
Images (1): 
|
|||||
| Why NVIDIA Corporation (NVDA) Is Among the Cheap Robotics Stocks … | https://www.insidermonkey.com/blog/why-… | 1 | Jan 04, 2026 08:00 | active | |
Why NVIDIA Corporation (NVDA) Is Among the Cheap Robotics Stocks to Invest In Now? - Insider MonkeyDescription: We recently compiled a list of the 10 Cheap Robotics Stocks to Invest In Now. Content:
Our #1 AI Stock Pick — 33% OFF: $9.99 (was $14.99) Monthly picks · Ad-free browsing · 30-day money back guarantee Our #1 AI Stock Pick — 33% OFF: $9.99 (was $14.99) Monthly picks · Ad-free browsing We recently compiled a list of the 10 Cheap Robotics Stocks to Invest In Now. In this article, we are going to take a look at where NVIDIA Corporation (NASDAQ:NVDA) stands against other robotics stocks to buy now. The robotics industry, which has grown modestly over the past few years, has suddenly picked up pace after the emergence of AI. According to Goldman Sachs’ Head of China Industrial Technology research, the total addressable market for humanoid robots is expected to reach $38 billion by 2035, an upgrade of sixfold from a previous projection of $6 billion in 2023. We recently covered 8 Most Promising Robotics Stocks According to Hedge Funds. According to the International Federation of Robotics (IFR), professional service robots experienced a 30% increase in sales in 2023. IFR’s statistics department noted that more than 205,000 robotics units were sold in 2023, with Asia-Pacific accounting for 80% of global robotics sales. Transportation and logistics service robots were in huge demand and accounted for 113,000 units built in 2023, up by 35% compared to 2022. Medical robots are also in high demand, and the number surged by 36% to almost 6,100 units in 2023. The demand for surgery and diagnostics robots was the highest as they registered growth of 14% and 25% year-over-year. The United States is home to 199 companies engaged in robotics, with 66% producing professional service robots, 27% consumer service robots, and 12% medical robots. China ranks second after the US with 107 service and medical robot manufacturers and Germany ranks third with 83 companies. According to IFR, the US manufacturing companies have invested significantly in automation, and the industrial robot installations surged by 12% to 44,303 units in 2023. Whereas, robotics installations in the electrical and electronics industry increased to 5,120 units in 2023, up by 37% year-over-year. Global X Robotics & Artificial Intelligence ETF (NASDAQ:BOTZ) and Robo Global Robotics and Automation Index ETF (NYSE:ROBO) have returned more than 11% over the last year, respectively. Given the rising demand for humanoids and automation systems, robotics stocks present a promising area for investors to explore. You can also visit and see the 12 Best Penny Stocks to Invest in According to the Media. A technician operating a robotic arm on a production line of semiconductor chips. To determine the list of cheap robotics stocks to invest in, we shortlisted the companies mainly involved in robotics with an analyst upside of more than 25%. Cheap, in the context of this article, means stocks that Wall Street analysts believe are undervalued and will skyrocket to higher share prices. We have ranked the cheap robotics stocks to invest in based on their popularity among hedge funds, as of Q3 2024, in ascending order. Why do we care about what hedge funds do? The reason is simple: our research has shown that we can outperform the market by imitating the top stock picks of the best hedge funds. Our quarterly newsletter’s strategy selects 14 small-cap and large-cap stocks every quarter and has returned 275% since May 2014, beating its benchmark by 150 percentage points (see more details here). Analyst Upside (as of January 11): 28% No. of Hedge Fund Holders: 193 NVIDIA, whose primary business revolves around designing and manufacturing GPUs, is disrupting the broader market due to its AI technology. Similarly, NVIDIA is playing a big role in autonomous machines and AI-enabled robots through its technology. The demand for AI-enabled robots is at record levels and continues to grow. NVIDIA Corporation’s (NASDAQ:NVDA) three-computer solution allows AI robots to learn and perform complex tasks with precision. Businesses are utilizing Nvidia Robotics’ full-stack, accelerated cloud-to-edge systems, and optimized AI models to train, operate, and optimize their robot systems and software. On January 6, NVIDIA Corporation (NASDAQ:NVDA) introduced its Isaac GR00T Blueprint which will assist developers to generate exponentially large synthetic datasets to train their humanoids using imitation learning. Over the next two decades, the humanoid robots industry is anticipated to cross $38 billion, which creates a huge opportunity for NVIDIA to exploit the growing market. Overall, NVDA ranks 1st on our list of Cheap Robotics Stocks to Invest in Now. While we acknowledge the potential of NVDA to grow, our conviction lies in the belief that AI stocks hold greater promise for delivering higher returns and doing so within a shorter time frame. If you are looking for an AI stock that is more promising than NVDA but that trades at less than 5 times its earnings, check out our report about the cheapest AI stock. READ NEXT: 8 Best Wide Moat Stocks to Buy Now and 30 Most Important AI Stocks According to BlackRock. Disclosure: None. This article is originally published at Insider Monkey. Yahoo Finance Returns since its inception in May 2014 (through August 15th, 2025) 30 day money back guarantee. Cancel anytime. Warren Buffett Berkshire Hathaway $293,447,417,000 David Einhorn Greenlight Capital $1,491,303,000 George Soros Soros Fund Management $5,416,602,000 Jim Simons Renaissance Technologies $77,426,184,000 Leon Cooperman Omega Advisors $1,886,381,000 Carl Icahn Icahn Capital LP $22,521,664,000 Steve Cohen Point72 Asset Management $22,767,998,000 John Paulson Paulson & Co $3,510,256,000 David Tepper Appaloosa Management LP $4,198,712,000 Paul Tudor Jones Tudor Investment Corp $6,160,740,000 Get our editor’s daily picks straight in your inbox!
Images (1): 
|
|||||
| Robot Or Human? Video Of Waitress Serving Food At Chinese … | https://www.ndtv.com/offbeat/robot-or-h… | 0 | Jan 03, 2026 00:01 | active | |
Robot Or Human? Video Of Waitress Serving Food At Chinese Restaurant Goes ViralDescription: In the video, the waitress pretends to be a robot and serves food to customers with robotic-like movements. Content: |
|||||
| Evaluation of Human-Robot Interfaces based on 2D/3D Visual and Haptic … | https://hal.science/hal-05313710v1 | 1 | Jan 03, 2026 00:01 | active | |
Evaluation of Human-Robot Interfaces based on 2D/3D Visual and Haptic Feedback for Aerial Manipulation - Archive ouverte HALURL: https://hal.science/hal-05313710v1 Description: Most telemanipulation systems for aerial robots provide the operator with only 2D screen visual information. The lack of richer information about the robot's status and environment can limit human awareness and, in turn, task performance. While the pilot's experience can often compensate for this reduced flow of information, providing richer feedback is expected to reduce the cognitive workload and offer a more intuitive experience overall. This work aims to understand the significance of providing additional pieces of information during aerial telemanipulation, namely (i) 3D immersive visual feedback about the robot's surroundings through mixed reality (MR) and (ii) 3D haptic feedback about the robot interaction with the environment. To do so, we developed a human-robot interface able to provide this information. First, we demonstrate its potential in a real-world manipulation task requiring sub-centimeter-level accuracy. Then, we evaluate the individual effect of MR vision and haptic feedback on both dexterity and workload through a human subjects study involving a virtual block transportation task. Results show that both 3D MR vision and haptic feedback improve the operator's dexterity in the considered teleoperated aerial interaction tasks. Nevertheless, pilot experience remains the most significant factor. Content:
Most telemanipulation systems for aerial robots provide the operator with only 2D screen visual information. The lack of richer information about the robot's status and environment can limit human awareness and, in turn, task performance. While the pilot's experience can often compensate for this reduced flow of information, providing richer feedback is expected to reduce the cognitive workload and offer a more intuitive experience overall. This work aims to understand the significance of providing additional pieces of information during aerial telemanipulation, namely (i) 3D immersive visual feedback about the robot's surroundings through mixed reality (MR) and (ii) 3D haptic feedback about the robot interaction with the environment. To do so, we developed a human-robot interface able to provide this information. First, we demonstrate its potential in a real-world manipulation task requiring sub-centimeter-level accuracy. Then, we evaluate the individual effect of MR vision and haptic feedback on both dexterity and workload through a human subjects study involving a virtual block transportation task. Results show that both 3D MR vision and haptic feedback improve the operator's dexterity in the considered teleoperated aerial interaction tasks. Nevertheless, pilot experience remains the most significant factor. Connectez-vous pour contacter le contributeur https://hal.science/hal-05313710 Soumis le : mardi 14 octobre 2025-11:02:57 Dernière modification le : lundi 27 octobre 2025-11:20:01 Contact Ressources Informations Questions juridiques Portails CCSD
Images (1): 
|
|||||
| Chinese robotics firm unveils highly realistic robot head designed to … | https://www.dimsumdaily.hk/chinese-robo… | 0 | Jan 03, 2026 00:01 | active | |
Chinese robotics firm unveils highly realistic robot head designed to revolutionise human-machine interactionDescription: A pioneering Chinese robotics company has introduced a remarkably lifelike robotic head, engineered to blink, nod, and gaze around with convincing human-like ma... Content: |
|||||
| Robots are everywhere – improving how they communicate with people … | https://theconversation.com/robots-are-… | 1 | Jan 03, 2026 00:01 | active | |
Robots are everywhere – improving how they communicate with people could advance human-robot collaborationDescription: Robots are already carrying out tasks in clinics, classrooms and warehouses. Designing robots that are more receptive to human needs could help make them more useful in many contexts. Content:
Assistant Professor of Computer Science and Electrical Engineering, University of Maryland, Baltimore County Ramana Vinjamuri receives funding from National Science Foundation. View all partners https://doi.org/10.64628/AAI.pra6njeup Share article Print article Robots are machines that can sense the environment and use that information to perform an action. You can find them nearly everywhere in industrialized societies today. There are household robots that vacuum floors and warehouse robots that pack and ship goods. Lab robots test hundreds of clinical samples a day. Education robots support teachers by acting as one-on-one tutors, assistants and discussion facilitators. And medical robotics composed of prosthetic limbs can enable someone to grasp and pick up objects with their thoughts. Figuring out how humans and robots can collaborate to effectively carry out tasks together is a rapidly growing area of interest to the scientists and engineers that design robots as well as the people who will use them. For successful collaboration between humans and robots, communication is key. Robots were originally designed to undertake repetitive and mundane tasks and operate exclusively in robot-only zones like factories. Robots have since advanced to work collaboratively with people with new ways to communicate with each other. Cooperative control is one way to transmit information and messages between a robot and a person. It involves combining human abilities and decision making with robot speed, accuracy and strength to accomplish a task. For example, robots in the agriculture industry can help farmers monitor and harvest crops. A human can control a semi-autonomous vineyard sprayer through a user interface, as opposed to manually spraying their crops or broadly spraying the entire field and risking pesticide overuse. Robots can also support patients in physical therapy. Patients who had a stroke or spinal cord injury can use robots to practice hand grasping and assisted walking during rehabilitation. Another form of communication, emotional intelligence perception, involves developing robots that adapt their behaviors based on social interactions with humans. In this approach, the robot detects a person’s emotions when collaborating on a task, assesses their satisfaction, then modifies and improves its execution based on this feedback. For example, if the robot detects that a physical therapy patient is dissatisfied with a specific rehabilitation activity, it could direct the patient to an alternate activity. Facial expression and body gesture recognition ability are important design considerations for this approach. Recent advances in machine learning can help robots decipher emotional body language and better interact with and perceive humans. Questions like how to make robotic limbs feel more natural and capable of more complex functions like typing and playing musical instruments have yet to be answered. I am an electrical engineer who studies how the brain controls and communicates with other parts of the body, and my lab investigates in particular how the brain and hand coordinate signals between each other. Our goal is to design technologies like prosthetic and wearable robotic exoskeleton devices that could help improve function for individuals with stroke, spinal cord and traumatic brain injuries. One approach is through brain-computer interfaces, which use brain signals to communicate between robots and humans. By accessing an individual’s brain signals and providing targeted feedback, this technology can potentially improve recovery time in stroke rehabilitation. Brain-computer interfaces may also help restore some communication abilities and physical manipulation of the environment for patients with motor neuron disorders. Effective integration of robots into human life requires balancing responsibility between people and robots, and designating clear roles for both in different environments. As robots are increasingly working hand in hand with people, the ethical questions and challenges they pose cannot be ignored. Concerns surrounding privacy, bias and discrimination, security risks and robot morality need to be seriously investigated in order to create a more comfortable, safer and trustworthy world with robots for everyone. Scientists and engineers studying the “dark side” of human-robot interaction are developing guidelines to identify and prevent negative outcomes. Human-robot interaction has the potential to affect every aspect of daily life. It is the collective responsibility of both the designers and the users to create a human-robot ecosystem that is safe and satisfactory for all. A photo was replaced to more accurately reflect the work of the author. Copyright © 2010–2026, The Conversation Media Group Ltd
Images (1): 
|
|||||
| China’s ‘slim-waisted’ humanoid robot debuts with human-like skills | https://interestingengineering.com/inno… | 1 | Jan 03, 2026 00:01 | active | |
China’s ‘slim-waisted’ humanoid robot debuts with human-like skillsURL: https://interestingengineering.com/innovation/chinas-slim-waisted-humanoid-robot-debuts Description: Robotera’s new Q5 humanoid robot combines advanced dexterity, mobility, and AI interaction for real-world service across key sectors. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Explore The Most Powerful Tech Event in the World with Interesting Engineering. Stick with us as we share the highlights of CES week! Access expert insights, exclusive content, and a deeper dive into engineering and innovation. Engineering-inspired textiles, mugs, hats, and thoughtful gifts We connect top engineering talent with the world's most innovative companies. We empower professionals with advanced engineering and tech education to grow careers. We recognize outstanding achievements in engineering, innovation, and technology. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation. Engineering-inspired textiles, mugs, hats, and thoughtful gifts We connect top engineering talent with the world's most innovative companies We empower professionals with advanced engineering and tech education to grow careers. We recognize outstanding achievements in engineering, innovation, and technology. All Rights Reserved, IE Media, Inc. Q5 uses fused LiDAR and stereo vision to autonomously navigate complex spaces with smooth movement and minimal human oversight. Chinese robotics firm Robotera has unveiled a new humanoid service robot, model Q5, showcasing advanced dexterity, mobility, and interactive intelligence capabilities.With 44 degrees of freedom and a human-like build, the robot excels in environments requiring delicate manipulation, smooth navigation, and lifelike engagement.Q5 also supports full-body teleoperation through gloves and VR systems, and interacts using natural, AI-powered dialogue. According to the Beijing-based firm, the new humanoid is specially engineered for practical deployment in healthcare, retail, tourism, and education.In a video earlier in June, Robotera’s STAR1 humanoid was shown skillfully using chopsticks and performing culinary tasks like cooking dumplings, steaming buns, and pouring wine. The latest humanoid service robot, model Q5, aims to redefine human-robot interaction through its fusion of engineering precision and embodied artificial intelligence.The Q5, which has a height of 1650 mm and a weight of 124 pounds (70 kilograms), features 44 degrees of freedom, one of which is the highly dexterous 11-DoF XHAND Lite. This robotic hand replicates the human hand in size and dexterity, providing precision at the fingertip level and a robust payload capability of 22 pounds per arm (10 kg per arm). The ability to respond quickly—up to 10 times per second—facilitates smooth, responsive handling, aided by backdrivable, force-controlled joints that ensure safe and compliant engagement. The 7-DoF robotic arms of Q5 have a reach of 1380 mm and can extend over 2 meters to make contact with objects on the ground or above shoulder height. Its compact design—only 582 mm by 519 mm in size—allows for high maneuverability in cramped indoor spaces. With the aid of fused LiDAR and stereo vision systems, Q5 can navigate complex environments smoothly and autonomously across entire areas with only slight oversight.The robot boasts a hyper-anthropomorphic design, characterized by a slim waist and an expressive humanoid visage. With its AI-driven voice system, fast and natural dialogue is possible, featuring high recognition accuracy and context-aware responses. Through remote operation tools such as VR and sensor gloves, Q5 can also be teleoperated with low latency for precise task execution.Q5, driven by the EraAI platform, facilitates a complete AI lifecycle—from gathering teleoperation data to model training, simulation, deployment, and closed-loop learning. With a runtime of over 4 hours on a 60V supply, Q5 is set to revolutionize customer service, tourism, healthcare, and other fields by providing intelligent, mobile, and humanlike robotic assistance at scale. Robotera, another rising player in humanoid robotics from China, is gaining attention with its rapid innovation and advanced technology. Founded in August 2023 with support from China’s Tsinghua University, the company has introduced several high-performance humanoid robots, including its flagship model, STAR1.STAR1 possesses 55 degrees of freedom and a robust joint torque reaching 400Nm, enabling rapid and accurate motions at speeds as high as 25 radians per second. During a recent exhibition, STAR1 was observed employing chopsticks to manage fragile items such as dumplings with extraordinary skill. < It also carried out functions like steaming buns, pouring wine with precision, and clinking glasses in a toast, underscoring its potential in aiding traditional Chinese cooking. At the heart of these functionalities is Robotera’s innovative XHAND1 robotic hand, designed for humanoid uses as well as esports. This five-fingered hand features 12 degrees of freedom and advanced tactile sensors that can detect surface textures and temperature. The thumb and index fingers each possess three degrees of freedom, while the other fingers have two, allowing for realistic movements.XHAND1 can perform 10 clicks a second, providing a level of responsiveness that matches that of professional gamers. The hand works with the Apple Vision Pro, as shown in a recent demonstration, providing accurate input and instantaneous virtual engagement for gaming and robotics alike. Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Images (1): 
|
|||||
| Gizmodo | The Future Is Here | https://www.gizmodo.com.au/2021/12/amec… | 1 | Jan 03, 2026 00:01 | active | |
Gizmodo | The Future Is HereURL: https://www.gizmodo.com.au/2021/12/ameca-gets-angry/ Description: Dive into cutting-edge tech, reviews and the latest trends with the expert team at Gizmodo. Your ultimate source for all things tech. Content:
You can't work from home, but you can bring your slippers to the office. Culture AJ Dellinger Gadgets Tom Hawking Movies Cheryl Eddy Gadgets Kyle Barr Crime Bruce Gil Television Cheryl Eddy Passant Rabie AJ Dellinger Cheryl Eddy Bruce Gil Ed Cara Gayoung Lee James Whitbrook Tom Hawking Ellyn Lapointe AJ Dellinger Cheryl Eddy Kyle Barr Cheryl Eddy Zac Estrada Raymond Wong, Kyle Barr, and James Pero Health Ed Cara Physics & Chemistry Gayoung Lee Artificial Intelligence AJ Dellinger Artificial Intelligence Bruce Gil Artificial Intelligence Ece Yildirim Ece Yildirim Dec 30 Bruce Gil Dec 30 AJ Dellinger Dec 29 AJ Dellinger Dec 29 Bruce Gil Dec 30 Mike Pearl Dec 28 Mike Pearl Dec 22 AJ Dellinger Dec 17 Matt Novak Dec 17 Matt Novak Dec 15 Cryptocurrencies Mike Pearl Cryptocurrencies Kyle Torpey Cryptocurrencies Corey G. Johnson and Al Shaw, ProPublica Kyle Torpey Dec 22 Kyle Torpey Dec 12 Kyle Torpey Dec 11 Kyle Torpey Dec 6 Zac Estrada Jan 2 Zac Estrada Dec 28 Mike Pearl Dec 26 Mike Pearl Dec 25 Zac Estrada Dec 24 Zac Estrada Dec 24 Gadgets gifts are the best gifts to get friends and family. Other Gadgets Gizmodo Staff Gadgets Raymond Wong, Kyle Barr, and James Pero Reviews Kyle Barr Gadgets James Pero Reviews Gizmodo Staff Other Gadgets James Pero Deals Zainab Falak Deals Zainab Falak Deals Brittany Vincent Brittany Vincent Jan 2 Brittany Vincent Jan 2 Brittany Vincent Jan 2 Subscribe and interact with our community, get up to date with our customised Newsletters and much more. âThe Rightside Upâ brought the Netflix blockbuster to its end with a blend of action and agonyâplus an epilogue stuffed with hazy happiness. Television Cheryl Eddy Television Cheryl Eddy Theme Parks & Destinations James Whitbrook Trailers James Whitbrook Movies Isaiah Colbert Movies Cheryl Eddy Welcome to the circle. James Whitbrook This isn't the first cybersecurity breach to impact the space agency. Space & Spaceflight Passant Rabie Health Ed Cara Physics & Chemistry Gayoung Lee Space & Spaceflight Ellyn Lapointe Health Ed Cara Space & Spaceflight Ellyn Lapointe Before we can test for AI consciousness, we need to understand how consciousness actually emerges, experts say. Ellyn Lapointe ©2025 GIZMODO USA LLC. All rights reserved.
Images (1): 
|
|||||
| Meet Ameca, the remarkable (and not at all creepy) human-like … | https://globalnews.ca/news/8422932/amec… | 1 | Jan 03, 2026 00:01 | active | |
Meet Ameca, the remarkable (and not at all creepy) human-like robot - National | Globalnews.caURL: https://globalnews.ca/news/8422932/ameca-robot-android-engineered-arts-video/ Description: "The reason for making a robot that looks like a person is to interact with people," said Engineered Arts founder Will Jackson about Ameca's design. Content:
Instructions: Want to discuss? Please read our Commenting Policy first. If you get Global News from Instagram or Facebook - that will be changing. Find out how you can still connect with us. This article is more than 4 years old and some information may not be up to date. Robot engineers at Cornwall-based Engineered Arts have unveiled a remarkably human-like android, named “Ameca.” A short promo video released by the company shows Ameca seemingly “waking up,” looking at its hands and then towards the camera. The 40-second clip has racked up well over 10 million views online since Engineered Arts released it earlier this week. Ameca has grey-coloured skin, with deliberately gender- and race-neutral characteristics. The company describes it as the “world’s most advanced human shaped robot representing the forefront of human-robotics technology.” “The reason for making a robot that looks like a person is to interact with people. The human face is a very high bandwidth communication tool, and that’s why we built these expressive robots,” Engineered Arts founder Will Jackson told Reuters. He added: “We’ve tried to be gender-neutral, race neutral. We’re just trying to make something that has the basic human characteristics — expression — without putting anything else on top of that. So, hence the grey faces. It’s really been 15 years in gestation.” Engineered Arts designs and manufactures humanoid entertainment robots for science centres, theme parks and businesses. Ameca is now available for purchase or rental, though Jackson believes it is the perfect test-platform for artificial intelligence (AI). “A lot of people working on AI interaction, all kinds of new apps that are using vision systems, segmentation, face recognition, speech recognition, voice synthesis. But what you don’t see is the hardware to run all that software on. So what we’re trying to provide is a platform for AI,” Jackson said. “And a lot of communication is not verbal,” he continued. “So it’s not all about speech, it’s about expression, it’s about gestures: a simple move like that can mean a thousand words. The robot doesn’t have to say anything. So, the last thing we wanted to make was a robot that says, ‘please repeat the question.’ So it’s about trying to do natural human interaction. So imagine: there’s been a lot of talk about metaverses recently: imagine taking your metaverse character out into the real world. You need some embodiment for that. So, you wanted to take your virtual self to a meeting in New York, Hawaii, Hong Kong. Send a robot.” He added that a robot like Ameca costs more than US$133,000 (CDN$170,000) to buy. The email you need for the day’s top news stories from Canada and around the world. The email you need for the day’s top news stories from Canada and around the world.
Images (1): 
|
|||||
| PJSC Sberbank : Sber's telemarketing robot makes 99.5% of phone … | https://www.marketscreener.com/quote/st… | 0 | Jan 03, 2026 00:01 | active | |
PJSC Sberbank : Sber's telemarketing robot makes 99.5% of phone calls without human involvementDescription: The productivity of Sber's telemarketing robot has reached 2 million calls per day. Two out of three calls to clients next year will be made by the robot, accor... Content: |
|||||
| Elbit : Israel Innovation Authority Approves the Establishment of a … | https://www.marketscreener.com/quote/st… | 0 | Jan 03, 2026 00:01 | active | |
Elbit : Israel Innovation Authority Approves the Establishment of a Consortium Led by Elbit Systems to Develop Human-Robot Interaction TechnologiesDescription: Israel Innovation Authority has recently approved the establishment of a new innovation consortium, led by Elbit Systems C4I and Cyber, for Human-Robot Interact... Content: |
|||||
| Robot shocks with how human-like it is (VIDEO) — RT … | https://www.rt.com/news/542122-humanoid… | 1 | Jan 03, 2026 00:01 | active | |
Robot shocks with how human-like it is (VIDEO) — RT World NewsURL: https://www.rt.com/news/542122-humanoid-robot-ameca-expressions/ Description: A new humanoid robot has made a huge step towards crossing the ‘uncanny valley,’ with the machine filmed displaying a whole range of almost realistic human facial expressions. Content:
A new humanoid robot has made a huge step towards crossing the ‘uncanny valley,’ with the machine filmed displaying a whole range of almost realistic human facial expressions. ‘Ameca’ has been described by its British developers at Engineered Arts as “the perfect humanoid robot platform for human-robot interaction.” The footage, which captured the terrifyingly real robot in action, proves that the company’s bold statement isn’t much of a stretch. The grey-colored machine, which vaguely resembles the characters from the 2004 movie ‘I, Robot,’ offers a whole range of human emotions, coupled with realistic eye movement. In what appears to be a pre-programmed demonstration, Ameca first wakes up, then checks out her arms with curiosity, before making a surprised face after ‘noticing’ that ‘she’ is being filmed. READ MORE: Will AI turn humans into 'waste product'? The emotional robot is already available for purchase and rental. Right now, it’s only a stationary model, but the developers plan to further upgrade it, promising that “one day Ameca will walk.” RT News App © Autonomous Nonprofit Organization “TV-Novosti”, 2005–2026. All rights reserved. This website uses cookies. Read RT Privacy policy to find out more.
Images (1): 
|
|||||
| Using biopotential and bio-impedance for intuitive human–robot interaction | Nature … | https://www.nature.com/articles/s44287-… | 1 | Jan 03, 2026 00:01 | active | |
Using biopotential and bio-impedance for intuitive human–robot interaction | Nature Reviews Electrical EngineeringDescription: The rising interest in robotics and virtual reality has driven a growing demand for intuitive interfaces that enable seamless human–robot interaction (HRI). Bio-signal-based solutions, using biopotential and bio-impedance, offer a promising approach for estimating human motion intention thanks to their ability to capture physiological neuromuscular activity in real time. This Review discusses the potential of biopotential and bio-impedance sensing systems for advancing HRI focusing on the role of integrated circuits in enabling practical applications. Biopotential and bio-impedance can be used to monitor human physiological states and motion intention, making them highly suitable for enhancing motion recognition in HRI. However, as stand-alone modalities, they face limitations related to inter-subject variability and susceptibility to noise, highlighting the need for hybrid sensing techniques. The performance of these sensing modalities is closely tied to the development of integrated circuits optimized for low-noise, low-power operation and accurate signal acquisition in a dynamic environment. Understanding the complementary strengths and limitations of biopotential and bio-impedance signals, along with the advances in integrated circuit technologies for their acquisition, highlights the potential of hybrid, multimodal systems to enable robust, intuitive and scalable HRI. The growing interest in robotics in daily life has increased the demand for intuitive interfaces for human–robot interaction (HRI). This Review examines the potential, challenges and innovations of bio-signal analysis to enhance HRI and facilitate broader applications. Content:
Thank you for visiting nature.com. You are using a browser version with limited support for CSS. To obtain the best experience, we recommend you use a more up to date browser (or turn off compatibility mode in Internet Explorer). In the meantime, to ensure continued support, we are displaying the site without styles and JavaScript. Advertisement Nature Reviews Electrical Engineering volume 2, pages 555–571 (2025)Cite this article 1339 Accesses 30 Altmetric Metrics details The rising interest in robotics and virtual reality has driven a growing demand for intuitive interfaces that enable seamless human–robot interaction (HRI). Bio-signal-based solutions, using biopotential and bio-impedance, offer a promising approach for estimating human motion intention thanks to their ability to capture physiological neuromuscular activity in real time. This Review discusses the potential of biopotential and bio-impedance sensing systems for advancing HRI focusing on the role of integrated circuits in enabling practical applications. Biopotential and bio-impedance can be used to monitor human physiological states and motion intention, making them highly suitable for enhancing motion recognition in HRI. However, as stand-alone modalities, they face limitations related to inter-subject variability and susceptibility to noise, highlighting the need for hybrid sensing techniques. The performance of these sensing modalities is closely tied to the development of integrated circuits optimized for low-noise, low-power operation and accurate signal acquisition in a dynamic environment. Understanding the complementary strengths and limitations of biopotential and bio-impedance signals, along with the advances in integrated circuit technologies for their acquisition, highlights the potential of hybrid, multimodal systems to enable robust, intuitive and scalable HRI. Electromyography (EMG) effectively captures human motion intention and advances in deep learning are enhancing its feature extraction functionality, improving the control of wearable and collaborative robots. Electrical impedance tomography (EIT) is a non-invasive bio-impedance imaging technique that enables real-time diagnosis of muscle volume changes and condition. Integrating the bio-signals involved in the different stages of human motion improves precision in recognizing motion intentions. Biopotential acquisition integrated circuits that can record different bio-signals can markedly reduce the form factor of the sensing module and the power consumption while focusing on enhancing noise performance. Bio-impedance integrated circuits comprise transmitter and receiver components, facilitating electrical excitation and demodulation processes, specifically customized to meet power, accuracy and form factor requirements. This is a preview of subscription content, access via your institution Subscribe to this journal Receive 12 digital issues and online access to articles 121,22 € per year only 10,10 € per issue Buy this article 39,95 € Prices may be subject to local taxes which are calculated during checkout Ostrowski, A. K., Zhang, J., Breazeal, C. & Park, H. W. Promising directions for human–robot interactions defined by older adults. Front. Robot. AI 11, 1289414 (2024). Article Google Scholar Złotowski, J., Weiss, A. & Tscheligi, M. Interaction scenarios for HRI in public space. In Proc. 3rd International Conference on Social Robotics (eds Mutlu, B. et al.) Vol. 3, 1–10 (Springer, 2011). Shimada, S., Golyanik, V., Xu, W. & Theobalt, C. Physcap: physically plausible monocular 3D motion capture in real time. ACM Trans. Graph. 39, 1–16 (2020). Article Google Scholar Nagymáté, G. & Kiss, R. M. Application of OptiTrack motion capture systems in human movement analysis: a systematic literature review. Recent. Innov. Mechatron. 5, 1–9 (2018). Google Scholar Pfister, A., West, A. M., Bronner, S. & Noah, J. A. Comparative abilities of Microsoft Kinect and Vicon 3D motion capture for gait analysis. J. Med. Eng. Technol. 38, 274–280 (2014). Article Google Scholar Roetenberg, D., Luinge, H. & Slycke, P. Xsens MVN: full 6DOF human motion tracking using miniature inertial sensors. Xsens Motion Technol. BV, Tech. Rep. 1, 1–7 (2009). Google Scholar Gallego, J. Á. et al. A multimodal human–robot interface to drive a neuroprosthesis for tremor management. IEEE Trans. Syst. Man Cybern. Part C. 42, 1159–1168 (2012). Article Google Scholar Yeon, S. H. et al. Acquisition of surface EMG using flexible and low-profile electrodes for lower extremity neuroprosthetic control. IEEE Trans. Med. Robot. Bionics 3, 563–572 (2021). Article Google Scholar Lazarou, I., Nikolopoulos, S., Petrantonakis, P. C., Kompatsiaris, I. & Tsolaki, M. EEG-based brain–computer interfaces for communication and rehabilitation of people with motor impairment: a novel approach of the 21st century. Front. Hum. Neurosci. 12, 14 (2018). Article Google Scholar Zhang, T., Sun, H. & Zou, Y. An electromyography signals-based human–robot collaboration system for human motion intention recognition and realization. Robot. Comput.-Integr. Manuf. 77, 102359 (2022). Article Google Scholar Lyu, J. et al. Coordinating human–robot collaboration by EEG-based human intention prediction and vigilance control. Front. Neurorobot. 16, 1068274 (2022). Article Google Scholar Merlo, A., Farina, D. & Merletti, R. A fast and reliable technique for muscle activity detection from surface EMG signals. IEEE Trans. Biomed. Eng. 50, 316–323 (2003). Article Google Scholar Jeong, H., Feng, J. & Kim, J. 2.5D laser-cutting-based customized fabrication of long-term wearable textile sEMG sensor: from design to intention recognition. IEEE Robot. Autom. Lett. 7, 10367–10374 (2022). Article Google Scholar Staudenmann, D., Kingma, I., Daffertshofer, A., Stegeman, D. F. & van Dieën, J. H. Improving EMG-based muscle force estimation by using a high-density EMG grid and principal component analysis. IEEE Trans. Biomed. Eng. 53, 712–719 (2006). Article Google Scholar Teplan, M. Fundamentals of EEG measurement. Meas. Sci. Rev. 2, 1–11 (2002). Google Scholar Hendrix, C. R. et al. A new EMG frequency-based fatigue threshold test. J. Neurosci. Methods 181, 45–51 (2009). Article Google Scholar Huang, L. K. et al. Electrical impedance myography applied to monitoring of muscle fatigue during dynamic contractions. IEEE Access. 8, 13056–13065 (2020). Article Google Scholar Kogi, K. & Hakamada, T. Frequency analysis of the surface electromyogram in muscle fatigue. Rodo Kagaku. J. Sci. Labour 38, 519–528 (1962). Google Scholar Zhu, J. et al. EIT-kit: an electrical impedance tomography toolkit for health and motion sensing. In 34th Annual ACM Symposium on User Interface Software and Technology 400–413 (ACM, 2021). Khan, S. et al. Relative accuracy of bioelectrical impedance analysis for assessing body composition in children with severe obesity. J. Pediatr. Gastroenterol. Nutr. 70, e129–e135 (2020). Article Google Scholar Antonio, J. et al. Comparison of dual-energy X-ray absorptiometry (DXA) versus a multi-frequency bioelectrical impedance (InBody 770) device for body composition assessment after a 4-week hypoenergetic diet. J. Funct. Morphol. Kinesiol. 4, 23 (2019). Article Google Scholar Sanchez, B. & Rutkove, S. B. Electrical impedance myography and its applications in neuromuscular disorders. Neurotherapeutics 14, 107–118 (2017). Article Google Scholar Anabestani, H., Sadaghiani, S. M. & Bhadra, S. Low power flexible sensor for ambient light-based blood oxygen saturation measurement. In 2023 IEEE SENSORS 1–4 (IEEE, 2023). Yang, X., Yan, J. & Liu, H. Comparative analysis of wearable A-mode ultrasound and sEMG for muscle–computer interface. IEEE Trans. Biomed. Eng. 67, 2434–2442 (2019). Article Google Scholar McIntosh, J., Marzo, A., Fraser, M. & Phillips, C. Echoflex: Hand gesture recognition using 668 ultrasound imaging. In Proc. 2017 CHI Conference on Human Factors in Computing Systems 1923–1934 (ACM, 2017). Politti, F., Casellato, C., Kalytczak, M. M., Garcia, M. B. S. & Biasotto-Gonzalez, D. A. Characteristics of EMG frequency bands in temporomandibullar disorders patients. J. Electromyogr. Kinesiol. 31, 119–125 (2016). Article Google Scholar Merletti, R., Botter, A., Troiano, A., Merlo, E. & Minetto, M. A. Technology and instrumentation for detection and conditioning of the surface electromyographic signal: state of the art. Clin. Biomech. 24, 122–134 (2009). Article Google Scholar Webster, J. G. Medical Instrumentation: Application and Design (Wiley, 2009). Chung, C., Mun, H., Atashzar, S. F. & Kyung, K.-U. A novel design of thin flexible force 678 myography sensor using weaved optical fiber: a proof-of-concept study. In 21st International Conference on Ubiquitous Robots 1–6 (IEEE, 2024). Wei, D., Chen, L., Zhao, L., Zhou, H. & Huang, B. A vision-based measure of environmental effects on inferring human intention during human robot interaction. IEEE Sens. J. 22, 4246–4256 (2022). Article Google Scholar Guo, X. et al. A fast-response dynamic-static parallel attention GCN network for body–hand gesture recognition in HRI. IEEE Trans. Ind. Electron. 71, 5993–6004 (2024). Article Google Scholar De Luca, C. J. Surface electromyography: detection and recording. DelSys Inc. 10, 1–10 (2002). Google Scholar Myrtec, M., Frölich, E., Fichtler, A. & Brügner, G. ECG changes, emotional arousal, and subjective state: an ambulatory monitoring study with CHD patients. J. Psychophysiol. 14, 106 (2000). Article Google Scholar Gui, K., Liu, H. & Zhang, D. A practical and adaptive method to achieve EMG-based torque estimation for a robotic exoskeleton. IEEE/ASME Trans. Mechatron. 24, 483–494 (2019). Article Google Scholar Kyeong, S. et al. Surface electromyography characteristics for motion intention recognition and implementation issues in lower-limb exoskeletons. Int. J. Control Autom. Syst. 20, 1018–1028 (2022). Article Google Scholar Doheny, E., Lowery, M., FitzPatrick, D. & O’Malley, M. Effect of elbow joint angle on force–EMG relationships in human elbow flexor and extensor muscles. J. Electromyogr. Kinesiol.: Off. J. Int. Soc. Electrophysiol. Kinesiol. 18, 760–770 (2008). Article Google Scholar Liu, P., Liu, L. & Clancy, E. Influence of joint angle on EMG–torque model during constant-posture, torque-varying contractions. IEEE Trans. Neural Syst. Rehabil. Eng. 23, 1039–1046 (2015). Article Google Scholar Hinrichs, H. et al. Comparison between a wireless dry electrode EEG system with a conventional wired wet electrode EEG system for clinical applications. Sci. Rep. 10, 5218 (2020). Article Google Scholar Phukpattaranont, P., Thiamchoo, N. & Neranon, P. Real-time identification of noise type contaminated in surface electromyogram signals using efficient statistical features. Med. Eng. Phys. 131, 104232 (2024). Article Google Scholar Drees, C. et al. Skin irritation during video-EEG monitoring. Neurodiagn. J. 56, 139–150 (2016). Article Google Scholar Ouchida, S., Nikpour, A., Fairbrother, G. & Senturias, M. EEG electrode-induced skin injury among adult patients undergoing ambulatory EEG monitoring. Neurodiagn. J. 59, 219–231 (2019). Article Google Scholar Kim, H. et al. Skin preparation-free, stretchable microneedle adhesive patches for reliable electrophysiological sensing and exoskeleton robot control. Sci. Adv. 10, eadk5260 (2024). Article Google Scholar Jeong, J., Park, J. & Lee, S. 3D printing fabrication process for fine control of microneedle shape. Micro Nano Syst. Lett. 11, 1 (2023). Article Google Scholar Ji, H. et al. Skin-integrated, biocompatible, and stretchable silicon microneedle electrode for long-term EMG monitoring in motion scenario. NPJ Flex. Electron. 7, 46 (2023). Article Google Scholar Zhao, Q. et al. Highly stretchable and customizable microneedle electrode arrays for intramuscular electromyography. Sci. Adv. 10, eadn7202 (2024). Article Google Scholar Gunnarsson, E., Rödby, K. & Seoane, F. Seamlessly integrated textile electrodes and conductive routing in a garment for electrostimulation: design, manufacturing and evaluation. Sci. Rep. 13, 17408 (2023). Article Google Scholar Song, T. et al. Review of sEMG for robot control: techniques and applications. Appl. Sci. 13, 9546 (2023). Article Google Scholar Cisnal, A., Pérez-Turiel, J., Fraile, J.-C., Sierra, D. & de la Fuente, E. Robhand: a hand exoskeleton with real-time EMG-driven embedded control. Quantifying hand gesture recognition delays for bilateral rehabilitation. IEEE Access. 9, 137809–137823 (2021). Article Google Scholar Lin, M., Huang, J., Fu, J., Sun, Y. & Fang, Q. A VR-based motor imagery training system with EMG-based real-time feedback for post-stroke rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 31, 1–10 (2022). Article Google Scholar Bi, L. Feleke, A. G. & Guan, C. A review on EMG-based motor intention prediction of continuous human upper limb motion for human–robot collaboration. Biomed. Signal. Process. Control. 51, 113–127 (2019). Article Google Scholar Meattini, R. et al. An sEMG-based human–robot interface for robotic hands using machine learning and synergies. IEEE Trans. Comp., Pack. Manuf. Technol. 8, 1149–1158 (2018). Google Scholar Varghese, R. J. et al. Design, fabrication and evaluation of a stretchable high-density electromyography array. Sensors 24, 1810 (2024). Article Google Scholar Zhang, L. et al. Fully organic compliant dry electrodes self-adhesive to skin for long-term motion-robust epidermal biopotential monitoring. Nat. Commun. 11, 4683 (2020). Article Google Scholar Lo, L.-W. et al. Stretchable sponge electrodes for long-term and motion-artifact-tolerant recording of high-quality electrophysiologic signals. ACS Nano 16, 11792–11801 (2022). Article Google Scholar Ergeneci, M., Gokcesu, K., Ertan, E. & Kosmas, P. An embedded, eight channel, noise canceling, wireless, wearable sEMG data acquisition system with adaptive muscle contraction detection. IEEE Trans. Biomed. Circuits Syst. 12, 68–79 (2018). Article Google Scholar Liang, Z. et al. A wireless, high-quality, soft and portable wrist-worn system for sEMG signal detection. Micromachines 14, 1085 (2023). Article Google Scholar Moin, A. et al. A wearable biosensing system with in-sensor adaptive machine learning for hand gesture recognition. Nat. Electron. 4, 54–63 (2020). Article Google Scholar Sacco, I. C. N., Gomes, A. A., Otuzi, M. E., Pripas, D. & Onodera, A. N. A method for better positioning bipolar electrodes for lower limb EMG recordings during dynamic contractions. J. Neurosci. Methods 180, 133–137 (2009). Article Google Scholar Sanchez, B., Pacheck, A. & Rutkove, S. B. Guidelines to electrode positioning for human and animal electrical impedance myography research. Sci. Rep. 6, 32615 (2016). Article Google Scholar Wang, M., Khundrakpam, B. & Vaughan, T. Effects of electrode position targeting in noninvasive electromyography technologies for finger and hand movement prediction. J. Med. Biol. Eng. 43, 603–611 (2023). Article Google Scholar Feng, J., Chang, H., Jeong, H. & Kim, J. Design of a flexible high-density surface electromyography sensor. In 42nd Annual International Conferences of the IEEE Engineering in Medicine and Biology Society 4130–4133 (IEEE, 2020). Zhang, D. et al. Stretchable and durable HD-sEMG electrodes for accurate recognition of swallowing activities on complex epidermal surfaces. Microsyst. Nanoeng. 9, 115 (2023). Article Google Scholar Hu, X., Song, A., Wang, J., Zeng, H. & Wei, W. Finger movement recognition via high-density electromyography of intrinsic and extrinsic hand muscles. Sci. Data 9, 373 (2022). Article Google Scholar Gao, S., Wang, Y., Fang, C. & Xu, L. A smart terrain identification technique based on electromyography, ground reaction force, and machine learning for lower limb rehabilitation. Appl. Sci. 10, 2638 (2020). Article Google Scholar Yun, I., Jeung, J., Song, Y. & Chung, Y. Non-invasive quantitative muscle fatigue estimation based on correlation between sEMG signal and muscle mass. IEEE Access. 8, 191751–191757 (2020). Article Google Scholar Turgunov, A., Zohirov, K., Rustamov, S. & Muhtorov, B. Using different features of signal in EMG signal classification. In 2024 International Conference on Information Science and Communications Technologies 1–5 (IEEE, 2020). Khan, S. M., Khan, A. A. & Farooq, O. Selection of features and classifiers for EMG-EEG-based upper limb assistive devices—a review. IEEE Rev. Biomed. Eng. 13, 248–260 (2019). Article Google Scholar Holobar, A. & Farina, D. Noninvasive neural interfacing with wearable muscle sensors: combining convolutive blind source separation methods and deep learning techniques for neural decoding. IEEE Signal. Process. Mag. 38, 103–118 (2021). Article Google Scholar Xia, P., Hu, J. & Peng, Y. EMG‐based estimation of limb movement using deep learning with recurrent convolutional neural networks. Artif. Organs 42, E67–E77 (2018). Article Google Scholar Geng, W. et al. Gesture recognition by instantaneous surface EMG images. Sci. Rep. 6, 36571 (2016). Article Google Scholar Fajardo, J. M., Gomez, O. & Prieto, F. EMG hand gesture classification using handcrafted and deep features. Biomed. Signal. Process. Control. 63, 102210 (2021). Article Google Scholar Sejati, P. A. et al. Multinode electrical impedance tomography (mnEIT) throughout whole-body electrical muscle stimulation (wbEMS). IEEE Trans. Instrum. Meas. 72, 1–14 (2023). Article Google Scholar Kwon, H., Guasch, M., Nagy, J. A., Rutkove, S. B. & Sanchez, B. New electrical impedance methods for the in situ measurement of the complex permittivity of anisotropic skeletal muscle using multipolar needles. Sci. Rep. 9, 3145 (2019). Article Google Scholar Lee, H., Kwon, D., Cho, H., Park, I. & Kim, J. Soft nanocomposite based multi-point, multi-directional strain mapping sensor using anisotropic electrical impedance tomography. Sci. Rep. 7, 39837 (2017). Article Google Scholar Kwon, H., Malik, W. Q., Rutkove, S. B. & Sanchez, B. Separation of subcutaneous fat from muscle in surface electrical impedance myography measurements using model component analysis. IEEE Trans. Biomed. Eng. 66, 354–364 (2018). Article Google Scholar Zhang, Y., Xiao, R. & Harrison, C. Advancing hand gesture recognition with high resolution electrical impedance tomography. In Proc. 29th Annual Symp. User Interface Software and Technology 843–850 (ACM, 2016). Atitallah, B. B. et al. Hand sign recognition system based on EIT imaging and robust CNN classification. IEEE Sens. J. 22, 1729–1737 (2021). Article Google Scholar Jiang, D., Wu, Y. & Demosthenous, A. Hand gesture recognition using three-dimensional electrical impedance tomography. IEEE Trans. Circuits Syst. II: Express Briefs 67, 1554–1558 (2020). Google Scholar Wu, Y. et al. Towards a high-accuracy wearable hand gesture recognition system using EIT. In International Symposium on Circuits and Systems 1–4 (IEEE, 2018). Yang, L. et al. A wireless, low-power, and miniaturized EIT system for remote and long-term monitoring of lung ventilation in the isolation ward of ICU. IEEE Trans. Instrum. Meas. 70, 1–11 (2021). Article Google Scholar Zhang, Y. & Harrison, C. Tomo: wearable, low-cost electrical impedance tomography for hand gesture recognition. In Proc. 28th Annual ACM Symposum on User Interface Software and Technology 167–173 (ACM, 2015). Brazey, B., Haddab, Y., Zemiti, N., Mailly, F. & Nouet, P. An open-source and easily replicable hardware for electrical impedance tomography. HardwareX 11, e00278 (2022). Article Google Scholar Fernández, J. E., López, C. M. & Leyton, V. M. A low-cost, portable 32-channel EIT system with four rings based on AFE4300 for body composition analysis. HardwareX 16, e00494 (2023). Article Google Scholar Creegan, A. et al. A wearable open-source electrical impedance tomography device. HardwareX 18, e00521 (2024). Article Google Scholar Rintoul, J. & Borgne, M. L. Open EIT. GitHub https://github.com/openeit (2020). Wu, Y. et al. A high frame rate wearable EIT system using active electrode ASICs for lung respiration and heart rate monitoring. IEEE Trans. Circuits Syst. I: Regul. Pap. 65, 3810–3820 (2018). Google Scholar Wu, Y., Jiang, D., Bardill, A., Bayford, R. & Demosthenous, A. A 122 fps, 1 MHz bandwidth multi-frequency wearable EIT belt featuring novel active electrode architecture for neonatal thorax vital sign monitoring. IEEE Trans. Biomed. Circuits Syst. 13, 927–937 (2019). Article Google Scholar Kauppinen, P., Hyttinen, J. & Malmivuo, J. Sensitivity distribution simulations of impedance tomography electrode combinations. BEM NFSI Conf. Proc. 7, 344–347 (2005). Google Scholar Adler, A. & Boyle, A. Electrical impedance tomography: tissue properties to image measures. IEEE Trans. Biomed. Eng. 64, 2494–2504 (2017). Article Google Scholar Grychtol, B. et al. Thoracic EIT in 3D: experiences and recommendations. Physiol. Meas. 40, 74006 (2019). Article Google Scholar Vauhkonen, P. J., Vauhkonen, M., Savolainen, T. & Kaipio, J. P. Three-dimensional electrical impedance tomography based on the complete electrode model. IEEE Trans. Biomed. Eng. 46, 1150–1160 (1999). Article Google Scholar Xue, T. et al. Progress and prospects of multimodal fusion methods in physical human–robot interaction: a review. IEEE Sens. J. 20, 10355–10370 (2020). Article Google Scholar Ding, Z., Yang, C., Wang, Z., Yin, X. & Jiang, F. Online adaptive prediction of human motion intention based on sEMG. Sensors 21, 2882 (2021). Article Google Scholar Farina, D. Interpretation of the surface electromyogram in dynamic contractions. Exerc. Sport. Sci. Rev. 34, 121–127 (2006). Article Google Scholar Dick, T. J. M. et al. Consensus for experimental design in electromyography (CEDE) project: application of EMG to estimate muscle force. J. Electromyogr. Kinesiol. 79, 102910 (2024). Article Google Scholar Boyer, M., Bouyer, L., Roy, J.-S. & Campeau-Lecours, A. Reducing noise, artifacts and interference in single-channel EMG signals: a review. Sensors 23, 2927 (2023). Article Google Scholar Sun, J. et al. Application of surface electromyography in exercise fatigue: a review. Front. Syst. Neurosci. 16, 893275 (2022). Article Google Scholar Kusche, R. & Ryschka, M. Combining bioimpedance and EMG measurements for reliable muscle contraction detection. IEEE Sens. J. 19, 11687–11696 (2019). Article Google Scholar Nahrstaedt, H., Schultheiss, C., Schauer, T. & Seidl, R. Bioimpedance- and EMG-triggered FES for improved protection of the airway during swallowing. Biomed. Eng./Biomed. Tech. 58, 000010151520134025 (2013). Google Scholar Briko, A., Kobelev, A. & Shchukin, S. Electrodes interchangeability during electromyogram and bioimpedance joint recording. In Ural Symposium on Biomedical Engineering, Radioelectronics and Information Technology 17–20 (IEEE, 2018). Ngo, C. et al. A wearable, multi-frequency device to measure muscle activity combining simultaneous electromyography and electrical impedance myography. Sensors 22, 1941 (2022). Article Google Scholar Heo, U. et al. Development of a bioimpedance and sEMG fusion sensor for gait phase detection: validation with a transtibial amputee. In 45th Annual International Conference of the IEEE Engineering in Medicine & Biology Society 1–4 (IEEE, 2023). Kusche, R. & Ryschka, M. in World Congress on Medical Physics and Biomedical Engineering 2018 (eds Lhotska, L. et al.) Vol. 2, 847–850 (Springer, 2019). Blanco-Almazán, D. et al. Combining bioimpedance and myographic signals for the assessment of COPD during loaded breathing. IEEE Trans. Biomed. Eng. 68, 298–307 (2020). Article Google Scholar Zhou, L. et al. How we found our IMU: guidelines to IMU selection and a comparison of seven IMUs for pervasive healthcare applications. Sensors 20, 4090 (2020). Article Google Scholar Suprem, A., Deep, V. & Elarabi, T. A. Orientation and displacement detection for smartphone device based IMUs. IEEE Access. 5, 987–997 (2017). Article Google Scholar Mazzà, C. et al. Technical validation of real-world monitoring of gait: a multicentric observational study. BMJ Open. 11, e050785 (2021). Article Google Scholar Bangaru, S. S., Wang, C. & Aghazadeh, F. Data quality and reliability assessment of wearable EMG and IMU sensor for construction activity recognition. Sensors 20, 5264 (2020). Article Google Scholar Majumder, S. & Deen, M. J. Wearable IMU-based system for real-time monitoring of lower-limb joints. IEEE Sens. J. 21, 8267–8275 (2020). Article Google Scholar Kyu, A., Mao, H., Zhu, J., Goel, M. & Ahuja, K. Eitpose: wearable and practical electrical impedance tomography for continuous hand pose estimation. In Proc. CHI Conference on Human Factors in Computing Systems 1–10 (ACM, 2024). Zheng, E., Wan, J., Yang, L., Wang, Q. & Qiao, H. Wrist angle estimation with a musculoskeletal model driven by electrical impedance tomography signals. IEEE Robot. Autom. Lett. 6, 2186–2193 (2021). Article Google Scholar Liu, M. et al. imove: exploring bio-impedance sensing for fitness activity recognition. In International Conference on Pervasive Computing and Communications 194–205 (IEEE, 2024). Kang, I. et al. Real-time gait phase estimation for robotic hip exoskeleton control during multimodal locomotion. IEEE Robot. Autom. Lett. 6, 3491–3497 (2021). Article Google Scholar Lotti, N. et al. Adaptive model-based myoelectric control for a soft wearable arm exosuit: a new generation of wearable robot control. IEEE Robot. Autom. Mag. 27, 43–53 (2020). Article Google Scholar Wu, Y., Jiang, D., Liu, X., Bayford, R. & Demosthenous, A. A human–machine interface using electrical impedance tomography for hand prosthesis control. IEEE Trans. Biomed. Circuits Syst. 12, 1322–1333 (2018). Article Google Scholar Zheng, E., Li, Y., Wang, Q. & Qiao, H. Toward a human-machine interface based on electrical impedance tomography for robotic manipulator control. In International Conference on Intelligent Robots and Systems 2768–2774 (IEEE, 2019). Toledo-Peral, C. L. et al. Virtual/augmented reality for rehabilitation applications using electromyography as control/biofeedback: systematic literature review. Electronics 11, 2271 (2022). Article Google Scholar Yazıcıoğlu, R. F. et al. In Biopotential Readout Circuits for Portable Acquisition Systems (eds Serdijn, W. A. & Yazıcıoğlu, R. F.) 5–19 (Springer, 2009). Wang, J., Tang, L. & Bronlund, J. E. Surface EMG signal amplification and filtering. Int. J. Computer Applications 82, 15–22 (2013). Article Google Scholar Kim, C. et al. Sub-μV rms-noise sub-μW/channel ADC-direct neural recording with 200-mV/ms transient recovery through predictive digital autoranging. IEEE J. Solid-State Circuits 53, 3101–3110 (2018). Article Google Scholar Jeon, H., Bang, J.-S., Jung, Y., Choi, I. & Je, M. A high DR, DC-coupled, time-based neural-recording IC with degeneration R-DAC for bidirectional neural interface. IEEE J. Solid-State Circuits 54, 2658–2670 (2019). Article Google Scholar Lee, C. et al. A 6.5-μW 10-kHz BW 80.4-dB SNDR G m-C-based CT∆∑ modulator with a feedback-assisted Gm linearization for artifact-tolerant neural recording. IEEE J. Solid-State Circuits 55, 2889–2901 (2020). Article Google Scholar Shu, Y.-S. et al. A 4.5 mm 2 multimodal biosensing SoC for PPG, ECG, BIOZ and GSR acquisition in consumer wearable devices. In International Solid-State Circuits Conference 400–402 (IEEE, 2020). Koo, N. & Cho, S. A 24.8-μW biopotential amplifier tolerant to 15-V PP common-mode interference for two-electrode ECG recording in 180-nm CMOS. IEEE J. Solid-State Circuits 56, 591–600 (2020). Article Google Scholar Choi, K.-J. & Sim, J.-Y. An 18.6-μW/Ch TDM-based 8-channel noncontact ECG recording IC with common-mode interference suppression. IEEE Trans. Biomed. Circuits Syst. 16, 1021–1029 (2022). Article Google Scholar Yen, C.-J., Chung, W.-Y. & Chi, M. C. Micro-power low-offset instrumentation amplifier IC design for biomedical system applications. IEEE Trans. Circuits Syst. I: Regul. Pap. 51, 691–699 (2004). Article Google Scholar Texas Instruments. Ads1299-x low-noise, 4-, 6-, 8-channel, 24-bit, analog-to-digital converter for EEG and biopotential measurements. TI.com http://www.ti.com/lit/ds/symlink/ads1299.pdf (2017). Analog Devices. AD8422 (Rev. C), high performance, low power, rail-to-rail precision instrumentation amplifier; https://www.analog.com/media/en/technical-documentation/data-sheets/ad8422.pdf. Harrison, R. R. & Charles, C. A low-power low-noise CMOS amplifier for neural recording applications. IEEE J. Solid-State Circuits 38, 958–965 (2003). Article Google Scholar Chae, M. S., Liu, W. & Sivaprakasam, M. Design optimization for integrated neural recording systems. IEEE J. Solid-State Circuits 43, 1931–1939 (2008). Article Google Scholar Harrison, R. R. et al. A low-power integrated circuit for a wireless 100-electrode neural recording system. IEEE J. Solid-State Circuits 42, 123–133 (2006). Article Google Scholar Harrison, R. R. A versatile integrated circuit for the acquisition of biopotentials. In Custom Integrated Circuits Conference 115–122 (IEEE, 2007). Zou, X., Xu, X., Yao, L. & Lian, Y. A 1-V 450-nW fully integrated programmable biomedical sensor interface chip. IEEE J. Solid-State Circuits 44, 1067–1077 (2009). Article Google Scholar Fan, Q., Sebastiano, F., Huijsing, J. H. & Makinwa, K. A. A. A 1.8 μW 60 nV√Hz capacitively-coupled chopper instrumentation amplifier in 65 nm CMOS for wireless sensor nodes. IEEE J. Solid-State Circuits 46, 1534–1543 (2011). Article Google Scholar Lopez, C. M. et al. An implantable 455-active-electrode 52-channel CMOS neural probe. IEEE J. Solid-State Circuits 49, 248–261 (2013). Article Google Scholar Han, D., Zheng, Y., Rajkumar, R., Dawe, G. S. & Je, M. A 0.45 V 100-channel neural-recording IC with sub-μW/channel consumption in 0.18 μm CMOS. IEEE Trans. Biomed. Circuits Syst. 7, 735–746 (2013). Article Google Scholar Zou, X. et al. A 100-channel 1-mW implantable neural recording IC. IEEE Trans. Circuits Syst. I: Regul. Pap. 60, 2584–2596 (2013). Google Scholar Ando, H. et al. Wireless multichannel neural recording with a 128-Mbps UWB transmitter for an implantable brain–machine interfaces. IEEE Trans. Biomed. Circuits Syst. 10, 1068–1078 (2016). Article Google Scholar Lee, T. et al. A multimodal neural activity readout integrated circuit for recording fluorescence and electrical signals. IEEE Access 9, 118610–118623 (2021). Article Google Scholar Xu, J. et al. A μW 8-channel active electrode system for EEG monitoring. IEEE Trans. Biomed. Circuits Syst. 5, 555–567 (2011). Article Google Scholar Altaf, M. A. B., Zhang, C. & Yoo, J. A 16-channel patient-specific seizure onset and termination detection SoC with impedance-adaptive transcranial electrical stimulator. IEEE J. Solid-State Circuits 50, 2728–2740 (2015). Article Google Scholar Kassiri, H. et al. Battery-less tri-band-radio neuro-monitor and responsive neurostimulator for diagnostics and treatment of neurological disorders. IEEE J. Solid-State Circuits 51, 1274–1289 (2016). Article Google Scholar Lee, S. B., Lee, H.-M., Kiani, M., Jow, U.-M. & Ghovanloo, M. An inductively powered scalable 32-channel wireless neural recording system-on-a-chip for neuroscience applications. IEEE Trans. Biomed. Circuits Syst. 4, 360–371 (2010). Article Google Scholar Chandrakumar, H. & Marković, D. A 15.2-ENOB 5-kHz BW 4.5-μW chopped CT ΔΣ-ADC for artifact-tolerant neural recording front ends. IEEE J. Solid-State Circuits 53, 3470–3483 (2018). Article Google Scholar Jia, Y. et al. A trimodal wireless implantable neural interface system-on-chip. IEEE Trans. Biomed. Circuits Syst. 14, 1207–1217 (2020). Article Google Scholar Jung, Y. et al. A wide-dynamic-range neural-recording IC with automatic-gain-controlled AFE and CT dynamic-zoom ΔΣ ADC for saturation-free closed-loop neural interfaces. IEEE J. Solid-State Circuits 57, 3071–3082 (2022). Article Google Scholar Kim, M. K., Jeon, H., Lee, H. J. & Je, M. Plugging electronics into minds: recent trends and advances in neural interface microsystems. IEEE Solid-State Circuits Mag. 11, 29–42 (2019). Article Google Scholar Musk, E. An integrated brain–machine interface platform with thousands of channels. J. Med. Internet Res. 21, e16194 (2019). Article Google Scholar Yoon, D.-Y. et al. A 1024-channel simultaneous recording neural SoC with stimulation and real-time spike detection. In Symposium on VLSI Technology and Circuits 1–2 (IEEE, 2021). Samiei, A. & Hashemi, H. A bidirectional neural interface SoC with adaptive IIR stimulation artifact cancelers. IEEE J. Solid-State Circuits 56, 2142–2157 (2021). Article Google Scholar Park, Y., Cha, J.-H., Han, S.-H., Park, J.-H. & Kim, S.-J. A 3.8-µW 1.5-NEF 15-GΩ total input impedance chopper stabilized amplifier with auto-calibrated dual positive feedback in 110-nm CMOS. IEEE J. Solid-State Circuits 57, 2449–2461 (2022). Article Google Scholar Koo, N., Kim, H. & Cho, S. A 43.3-μW biopotential amplifier with tolerance to common-mode interference of 18 V pp and T-CMRR of 105 dB in 180-nm CMOS. IEEE J. Solid-State Circuits 58, 508–519 (2022). Article Google Scholar Lee, T. & Je, M. Trend investigation of biopotential recording front-end channels for invasive and non-invasive applications. Preprint at https://doi.org/10.48550/arXiv.2305.13463 (2023). Hou, Y., Zhu, Y., Ji, X., Richardson, A. G. & Liu, X. A wireless sensor–brain interface system for tracking and guiding animal behaviors through closed-loop neuromodulation in water mazes. IEEE J. Solid-State Circuits, (2024). Intan Technologies. RHD electrophysiology amplifier chips; https://intantech.com/products_RHD2000.html. Ha, H. et al. A bio-impedance readout IC with digital-assisted baseline cancellation for two-electrode measurement. IEEE J. Solid-State Circuits 54, 2969–2979 (2019). Article Google Scholar Yazicioglu, R. F., Merken, P., Puers, R. & Van Hoof, C. A 60 μW 60 nV/√Hz readout front-end for portable biopotential acquisition systems. IEEE J. Solid-State Circuits 42, 1100–1110 (2007). Article Google Scholar Van Helleputte, N. et al. A 160 μA biopotential acquisition IC with fully integrated IA and motion artifact suppression. IEEE Trans. Biomed. Circuits Syst. 6, 552–561 (2012). Article Google Scholar Yazicioglu, R. F., Merken, P., Puers, R. & Van Hoof, C. A 200 μW eight-channel EEG acquisition ASIC for ambulatory EEG systems. IEEE J. Solid-State Circuits 43, 3025–3038 (2008). Article Google Scholar Yan, L. et al. A 13 μA analog signal processing IC for accurate recognition of multiple intra-cardiac signals. IEEE Trans. Biomed. Circuits Syst. 7, 785–795 (2013). Article Google Scholar Van Helleputte, N. et al. A 345 µW multi-sensor biomedical SoC with bio-impedance, 3-channel ECG, motion artifact reduction, and integrated DSP. IEEE J. Solid-State Circuits 50, 230–244 (2014). Article Google Scholar Xu, J., Büsze, B., Van Hoof, C., Makinwa, K. A. A. & Yazicioglu, R. F. A 15-channel digital active electrode system for multi-parameter biopotential measurement. IEEE J. Solid-State Circuits 50, 2090–2100 (2015). Article Google Scholar Liu, C.-C., Chang, S.-J., Huang, G.-Y. & Lin, Y.-Z. A 10-bit 50-MS/s SAR ADC with a monotonic capacitor switching procedure. IEEE J. Solid-State Circuits 45, 731–740 (2010). Article Google Scholar Jung, Y. et al. Dynamic-range-enhancement techniques for artifact-tolerant biopotential-acquisition ICs. IEEE Trans. Circuits Syst. II: Express Briefs 69, 3090–3095 (2022). Google Scholar Muller, R., Gambini, S. & Rabaey, J. M. A 0.013 mm2, 5 µW, DC-coupled neural signal acquisition IC with 0.5 V supply. IEEE J. Solid-State Circuits 47, 232–243 (2011). Article Google Scholar Zhou, A. et al. A wireless and artefact-free 128-channel neuromodulation device for closed-loop stimulation and recording in non-human primates. Nat. Biomed. Eng. 3, 15–26 (2019). Article Google Scholar Pazhouhandeh, M. R., Chang, M., Valiante, T. A. & Genov, R. Track-and-zoom neural analog-to-digital converter with blind stimulation artifact rejection. IEEE J. Solid-State Circuits 55, 1984–1997 (2020). Article Google Scholar Huang, J. & Mercier, P. P. A 178.9-dB FoM 128-dB SFDR VCO-based AFE for ExG readouts with a calibration-free differential pulse code modulation technique. IEEE J. Solid-State Circuits 56, 3236–3246 (2021). Article Google Scholar Yang, X. et al. A 108 dB DR Δ∑–∑ M front-end with 720 mV pp input range and > ±300 mV offset removal for multi-parameter biopotential recording. IEEE Trans. Biomed. Circuits Syst. 15, 199–209 (2021). Article Google Scholar Jeong, K. et al. A PVT-robust AFE-embedded error-feedback noise-shaping SAR ADC with chopper-based passive high-pass IIR filtering for direct neural recording. IEEE Trans. Biomed. Circuits Syst. 16, 679–691 (2022). Article Google Scholar Yang, X. et al. An AC-coupled 1st-order Δ–ΔΣ readout IC for area-efficient neural signal acquisition. IEEE J. Solid-State Circuits 58, 949–960 (2023). Article Google Scholar Li, Y. et al. A 15.5-ENOB 335 mVPP-linear-input-range 4.7 GΩ-input-impedance CT-ΔΣM analog front-end with embedded low-frequency chopping. IEEE Solid-State Circuits Lett. 6, 265–268 (2023). Article Google Scholar Jeong, K., Ha, S. & Je, M. A 15.4-ENOB, fourth-order truncation-error-shaping NS-SAR-nested ΔΣ modulator with boosted input impedance and range for biosignal acquisition. IEEE J. Solid-State Circuits 59.2, 528–539 (2023). Google Scholar Pazhouhandeh, M. R. et al. Opamp-less sub-μW/channel Δ-modulated neural-ADC with super-GΩ input impedance. IEEE J. Solid-State Circuits 56, 1565–1575 (2020). Article Google Scholar Kassiri, H. et al. Rail-to-rail-input dual-radio 64-channel closed-loop neurostimulator. IEEE J. Solid-State Circuits 52, 2793–2810 (2017). Google Scholar Wang, S. et al. A compact chopper stabilized Δ–ΔΣ neural readout IC with input impedance boosting. IEEE Open. J. Solid-State Circuits Soc. 1, 67–78 (2021). Article Google Scholar Tang, T. et al. An active concentric electrode for concurrent EEG recording and body-coupled communication (BCC) data transmission. IEEE Trans. Biomed. Circuits Syst. 14, 1253–1262 (2020). Article Google Scholar Lee, S. et al. A 110dB-CMRR 100dB-PSRR multi-channel neural-recording amplifier system using differentially regulated rejection ratio enhancement in 0.18 μm CMOS. In International Solid-State Circuits Conference 472–474 (IEEE, 2018). Zhang, T., Son, H., Gao, Y., Lan, J. & Heng, C.-H. A 0.6V/0.9V 26.6-to-119.3µW ΔΣ-based bio-impedance readout IC with 101.9dB SNR and <0.1Hz 1/f corner. In International Solid-State Circuits Conference 394–396 (IEEE, 2021). Ha, H. et al. A bio-umpedance readout IC with frequency sweeping from 1k-to-1MHz for electrical impedance tomography. In Symposium on VLSI Technology and Circuits C174–C175 (IEEE, 2017). Zhou, Z. & Yatani, K. Gesture-aware interactive machine teaching with in-situ object annotations. In Proc. 35th Annual ACM Symposium on User Interface Software and Technology 1–14 (ACM, 2022). Adler, A. & Holder, D. Electrical Impedance Tomography: Methods, History and Applications (CRC, 2021). Min, M., Parve, T., Ronk, A., Annus, P. & Paavle, T. Synchronous sampling and demodulation in an instrument for multifrequency bioimpedance measurement. IEEE Trans. Instrum. Meas. 56, 1365–1372 (2007). Article Google Scholar Hong, S., Lee, J., Bae, J. & Yoo, H.-J. A 10.4 mW electrical impedance tomography SoC for portable real-time lung ventilation monitoring system. IEEE J. Solid-State Circuits 50, 2501–2512 (2015). Article Google Scholar Hong, S. et al. A 4.9 mΩ-sensitivity mobile electrical impedance tomography IC for early breast-cancer detection system. IEEE J. Solid-State Circuits 50, 245–257 (2014). Article Google Scholar Lee, Y., Song, K. & Yoo, H.-J. A 4.84 mW 30fps dual frequency division multiplexing electrical impedance tomography SoC for lung ventilation monitoring system. In Symposium on VLSI Technology and Circuits C204–C205 (IEEE, 2015). Kim, M. et al. A 1.4-mΩ-sensitivity 94-dB dynamic-range electrical impedance tomography SoC and 48-channel hub-SoC for 3-D lung ventilation monitoring system. IEEE J. Solid-State Circuits 52, 2829–2842 (2017). Article Google Scholar Liu, B. et al. A 13-channel 1.53-mW 11.28-mm2 electrical impedance tomography SoC based on frequency division multiplexing for lung physiological imaging. IEEE Trans. Biomed. circuits Syst. 13, 938–949 (2019). Article Google Scholar Zeng, L. & Heng, C.-H. An 8-channel 1.76-mW 4.84-mm2 electrical impedance tomography SoC with direct IF frequency division multiplexing. IEEE Trans. Circuits Syst. II: Express Briefs 68, 3401–3405 (2021). Google Scholar Rao, A., Murphy, E. K., Halter, R. J. & Odame, K. M. A 1 MHz miniaturized electrical impedance tomography system for prostate imaging. IEEE Trans. Biomed. circuits Syst. 14, 787–799 (2020). Article Google Scholar Wang, C. et al. Flexi-EIT: a flexible and reconfigurable active electrode electrical impedance tomography system. IEEE Trans. Biomed. Circuits Syst. 18.1, 89–99 (2023). Google Scholar Suh, J.-H. et al. A 16-channel impedance-readout IC with synchronous sampling and baseline cancelation for fast neural electrical impedance tomography. IEEE Solid-State Circuits Lett. 6, 109–112 (2023). Article Google Scholar Zhou, T. et al. A 0.63-mm2/ch 1.3-mΩ/√ Hz-sensitivity 1-MHz bandwidth active electrode electrical impedance tomography system. In Asian Solid-State Circuits Conference 1–3 (IEEE, 2022). Hanzaee, F. F. et al. A low-power recursive I/Q signal generator and current driver for bioimpedance applications. IEEE Trans. Circuits Syst. II: Express Briefs 69, 4108–4112 (2022). Google Scholar Um, S., Lee, J. & Yoo, H.-J. A 3.8-mW 1.9-mΩ/√Hz electrical impedance tomography IC with high input impedance and loading effect calibration for 3-D early breast cancer detect system. IEEE J. Solid-State Circuits 59, 2019–2028 (2024). Article Google Scholar Lee, J. et al. A 9.6-mW/Ch 10-MHz wide-bandwidth electrical impedance tomography IC with accurate phase compensation for early breast cancer detection. IEEE J. Solid-State Circuits 56, 887–898 (2020). Article Google Scholar Yazicioglu, R. F., Kim, S., Torfs, T., Kim, H. & Van Hoof, C. A 30 μW analog signal processor ASIC for portable biopotential signal monitoring. IEEE J. Solid-State Circuits 46, 209–223 (2010). Article Google Scholar Xu, J., Harpe, P. & Van Hoof, C. An energy-efficient and reconfigurable sensor IC for bio-impedance spectroscopy and ECG recording. IEEE J. Emerg. Sel. Top. Circuits Syst. 8, 616–626 (2018). Article Google Scholar Xu, J. et al. A 665 μW silicon photomultiplier-based NIRS/EEG/EIT monitoring ASIC for wearable functional brain imaging. IEEE Trans. Biomed. Circuits Syst. 12, 1267–1277 (2018). Article Google Scholar Song, S. et al. A 769 μW battery-powered single-chip SoC with BLE for multi-modal vital sign monitoring health patches. IEEE Trans. Biomed. Circuits Syst. 13, 1506–1517 (2019). Article Google Scholar Lin, Q. et al. Wearable multiple modality bio-signal recording and processing on chip: a review. IEEE Sens. J. 21, 1108–1123 (2020). Article Google Scholar Islam, M. A. et al. Cross-talk in mechanomyographic signals from the forearm muscles during sub-maximal to maximal isometric grip force. PLoS One 9, e96628 (2014). Article Google Scholar Marque, C. et al. Adaptive filtering for ECG rejection from surface EMG recordings. J. Electromyogr. Kinesiol. 15, 310–315 (2005). Article Google Scholar Parajuli, N. et al. Real-time EMG based pattern recognition control for hand prostheses: a review on existing methods, challenges and future implementation. Sensors 19, 4596 (2019). Article Google Scholar Zheng, Y. & Hu, X. Adaptive real-time decomposition of electromyogram during sustained muscle activation: a simulation study. IEEE Trans. Biomed. Eng. 69, 645–653 (2021). Article Google Scholar Zheng, N., Li, Y., Zhang, W. & Du, M. User-independent EMG gesture recognition method based on adaptive learning. Front. Neurosci. 16, 847180 (2022). Article Google Scholar Qi, J., Jiang, G., Li, G., Sun, Y. & Tao, B. Surface EMG hand gesture recognition system based on PCA and GRNN. Neural Comput. Appl. 32, 6343–6351 (2020). Article Google Scholar Wu, D., Yang, J. & Sawan, M. Transfer learning on electromyography (EMG) tasks: approaches and beyond. IEEE Trans. Neural Syst. RehabilitatiEng. 31, 3015–3034 (2023). Article Google Scholar Adler, A., Gaggero, P. & Maimaitijiang, Y. Distinguishability in EIT using a hypothesis-testing model. J. Phys. Conf. Ser. 224, 012056 (2010). Article Google Scholar Tang, M., Wang, W., Wheeler, J., McCormick, M. & Dong, X. The number of electrodes and basis functions in EIT image reconstruction. Physiol. Meas. 23, 129 (2002). Article Google Scholar Dixon, A. M. R., Allstot, E. G., Gangopadhyay, D. & Allstot, D. J. Compressed sensing system considerations for ECG and EMG wireless biosensors. IEEE Trans. Biomed. Circuits Syst. 6, 156–166 (2012). Article Google Scholar Moy, T. et al. An EEG acquisition and biomarker-extraction system using low-noise-amplifier and compressive-sensing circuits based on flexible, thin-film electronics. IEEE J. Solid-State Circuits 52, 309–321 (2016). Article Google Scholar Weltin-Wu, C. & Tsividis, Y. An event-driven clockless level-crossing ADC with signal-dependent adaptive resolution. IEEE J. Solid-State Circuits 48, 2180–2190 (2013). Article Google Scholar Analog Devices. MAX30001. Ultra-low-power, single-channel integrated biopotential (ECG, R-to-R, and pace detection) and bioimpedance (BioZ) AFE; https://www.analog.com/media/en/technical-documentation/data-sheets/max30001.pdf (2023). Um, S., Lee, J. & Yoo, H.-J. A 3.8 mW 1.9 m Ω/√ Hz electrical impedance tomography imaging with 28.4 M Ω high input impedance and loading calibration. In 49th European Solid State Circuits Conference 357–360 (IEEE, 2023). Download references This work was supported by a National Research Foundation of Korea (NRF) grant funded by the Korean government (MSIT) (RS-2021-NR059641). These authors contributed equally: Kyungseo Park, Hwayeong Jeong. Department of Robotics and Mechatronics Engineering, Daegu Gyeongbuk Institute of Science and Technology, Daegu, South Korea Kyungseo Park Reconfigurable Robotics Laboratory, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland Hwayeong Jeong Analog Biomed. Team, Interuniversity Microelectronics Centre (IMEC), Leuven, Belgium Yoontae Jung Energy-Efficient Microsystems Laboratory, Electrical and Computer Engineering, University of California, San Diego, San Diego, CA, USA Ji-Hoon Suh School of Electrical Engineering, Korea Advanced Institute of Science and Technology, Daejeon, South Korea Minkyu Je Department of Mechanical Engineering, Korea Advanced Institute of Science and Technology, Daejeon, South Korea Jung Kim Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar K.P., H.J., Y.J., J.-H.S. and M.J. researched data for the article, contributed substantially to discussion of the content and wrote the article. H.J., M.J. and J.K. reviewed and/or edited the manuscript before submission. Correspondence to Jung Kim. The authors declare that they have no competing interests. Nature Reviews Electrical Engineering thanks Benoit Gosselin, Karim Bouzid and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations. Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law. Reprints and permissions Park, K., Jeong, H., Jung, Y. et al. Using biopotential and bio-impedance for intuitive human–robot interaction. Nat Rev Electr Eng 2, 555–571 (2025). https://doi.org/10.1038/s44287-025-00191-5 Download citation Accepted: 04 June 2025 Published: 18 July 2025 Version of record: 18 July 2025 Issue date: August 2025 DOI: https://doi.org/10.1038/s44287-025-00191-5 Anyone you share the following link with will be able to read this content: Sorry, a shareable link is not currently available for this article. Provided by the Springer Nature SharedIt content-sharing initiative Collection Advertisement Nature Reviews Electrical Engineering (Nat Rev Electr Eng) ISSN 2948-1201 (online) © 2026 Springer Nature Limited Sign up for the Nature Briefing newsletter — what matters in science, free to your inbox daily.
Images (1): 
|
|||||
| This Chinese Robot Head Looks So Human Its Almost Creepy | https://propakistani.pk/2025/10/07/this… | 1 | Jan 03, 2026 00:01 | active | |
This Chinese Robot Head Looks So Human Its Almost CreepyURL: https://propakistani.pk/2025/10/07/this-chinese-robot-head-looks-so-human-its-almost-creepy/ Description: A Chinese robotics startup has introduced what looks to be one of the most realistic robot faces yet, capable of blinking, nodding, and moving its eyes in Content:
A Chinese robotics startup has introduced what looks to be one of the most realistic robot faces yet, capable of blinking, nodding, and moving its eyes in a strikingly human-like manner. The resemblance is uncanny. The company, AheadForm, released a demonstration video on YouTube showing the robotic head called the Origin M1 displaying subtle expressions as it appears to observe its surroundings. The head can tilt, blink, and respond to environmental cues, giving it a level of realism that could change how humans perceive robots. Founded in 2024, AheadForm says its goal is to make human-robot interactions more natural and emotionally intuitive. The company’s website explains that it plans to merge advanced artificial intelligence systems, including large language models (LLMs), with expressive robotic heads capable of understanding and responding to people in real time. AheadForm’s researchers say that creating emotionally expressive robots could prove valuable in industries such as customer service, education, and healthcare, where trust and human-like interaction are crucial. The firm has developed multiple lines of robotic designs, including the “Elf Series,” known for its stylized, expressive features, and the “Lan Series,” focused on more lifelike human movements and cost-efficient designs. According to the company, its current work centers on building humanoid heads that can perceive emotion, interpret human cues, and respond appropriately, bridging the gap between mechanical systems and genuine social interaction. Experts believe such developments could have far-reaching implications for human-robot relationships, potentially making service robots, caregivers, and AI companions more relatable in the years ahead. 📢 For the latest Tech & Telecom news, videos and analysis join ProPakistani's WhatsApp Group now! Follow ProPakistani on Google News & scroll through your favourite content faster! Shares ProPakistani is the premier and most trustworthy resource for all happenings in technology, telecom, business, sports, auto, education, real estate and entertainment news in Pakistan. Whether it's the top trending news, inside scoops or features, interviews, market trends and analysis, product reviews, How to's or tutorials – we cover it all. © 2026 ProPakistani.PK - All rights reserved Join the groups below to get latest news and updates.
Images (1): 
|
|||||
| Grundlagen der Human-Robot Interaction - Displays - Elektroniknet | https://www.elektroniknet.de/optoelektr… | 1 | Jan 03, 2026 00:01 | active | |
Grundlagen der Human-Robot Interaction - Displays - ElektroniknetDescription: Selbstfahrende Roboter arbeiten zunehmend an öffentlichen Plätzen. Damit sich Passanten und Roboter nicht gegenseitig behindern, werden Konzepte erprobt, wie sich die Bewegung der Roboter über Displays visualisieren und damit für Passanten voraussehbar machen lässt. Das sind die ersten Ergebnisse. Content:
Selbstfahrende Roboter arbeiten zunehmend an öffentlichen Plätzen. Damit sich Passanten und Roboter nicht gegenseitig behindern, werden Konzepte erprobt, wie sich die Bewegung der Roboter über Displays visualisieren und damit für Passanten voraussehbar machen lässt. Das sind die ersten Ergebnisse. Selbstfahrende Roboter wurden ursprünglich für die Industrie und die Logistik entwickelt. Das sind auch heute noch die größten Anwendungsfälle. Dort spielt die Mensch-Roboter-Interaktion eine untergeordnete Rolle, findet gar nicht oder höchstens mit einzelnen und trainierten Personen statt. Entsprechend sind auch die integrierten Anzeigesysteme und HMIs nicht für eine Interaktion mit Passanten in größeren Menschenmengen ausgelegt. Allmählich verlagert sich das Einsatzgebiet der Roboter aber aus den isolierten und weitestgehend menschenleeren Anwendungsbereichen und damit verändern sich auch die Anforderungen an die Anzeigesysteme. »Mittlerweile werden selbstfahrende Roboter auch in Bereichen eingesetzt, in denen sie mit einer größeren Menschenansammlung in Kontakt kommen können und sollen«, sagte Milton Guerry, Präsident der International Federation of Robotics (IFR) im August 2021. Der Verband schätzt den Weltmarkt für Serviceroboter in der Logistik für das Jahr 2020 auf rund 120.000 ausgelieferte Geräte; 2021 sollen es bereits 160.000 sein [1]. Im Vergleich dazu sind Serviceroboter für öffentliche Bereiche wie Hotels, Flughafenterminals oder in Parkanlagen mit rund 25.000 Geräten im Jahr 2020 zwar ein noch deutlich kleinerer Markt, dafür aber stark im Kommen. Das IFR prognostiziert bis 2023 ein durchschnittliches Wachstum von knapp 40 %. Neue Anzeigekonzepte werden, zumindest zum Teil, auch für das Segment der professionellen Reinigungsroboter (Bild 1) benötigt. Der Weltmarkt lag im Jahr 2020 bei rund 18.000 Geräten und soll laut IFR ähnlich stark anziehen wie die Serviceroboter in öffentlichen Bereichen. Neue Anzeigesysteme für die Mensch-Roboter-Interaktion werden in der Entwicklungsdisziplin HRI, Human-Robotic Interaction, erforscht. Ein zentrales Problem der HRI-Entwicklung sind Trajektorie-Konflikte. Sie entstehen dann, wenn die intendierte Fahrspur eines Roboters für den Menschen nicht einsichtig genug ist und führen vor allem an öffentlichen Plätzen mit hohem Durchgangsverkehr zu Störungen. Anders als beim Gang durch eine Menschenmenge, bei der sich das Gehverhalten der Mitmenschen, vor allem die Intention zum Abbiegen und Ausweichen, intuitiv einschätzt lässt, fehlt diese Intuition beim Umgang mit Robotern. Diesen Mangel sollen HRI-Anzeigen ausgleichen. Die Entwicklung von HRI-Anzeigesystemen steht noch relativ am Anfang. Für die Human Robotic Interaction sind bisher ledglich blaue Spotleuchten etabliert, die in Fahrtrichtung des Roboters scheinen (Bild 2). Der Ansatz ist zwar einfach umzusetzen, aber für Passanten nicht intuitiv verständlich. »Es hat auch erste Versuche mit Displays in Forschung und Industrie gegeben«, erklärt der Leiter des Displaylabors der Hochschule Pforzheim, Prof. Dr. Karlheinz Blankenbach. »Die Ergebnisse waren bisher aber nicht zufriedenstellend.« Insgesamt ist die Mensch-Roboter-Interaktion bei Servicerobotern an öffentlichen Plätzen ein noch wenig erforschtes Gebiet, in dem vor allem Praxiserfahrungen fehlen. Zu den grundlegenden Fragestellungen gehören: Welche Darstellung der Roboterfahrbahn wird quer durch alle Alters- und Kulturgruppen intuitiv verstanden? Welche Helligkeits- und Kontrastwerte sowie Farbwiedergabe muss das Anzeigesystem liefern? Welche Displays können diese Werte erreichen und sind zudem für die Integration in Serviceroboter geeignet? Diese Aspekte haben Etienne Charrier und Prof. Blankenbach von der Hochschule Pforzheim, Franziska Babel von der Universität Ulm und Siegfried Hochdorfer vom Ulmer Roboterhersteller Adlatus Robotics untersucht und ihre Ergebnisse in einem Paper auf der SID Display Week 2021 vorgestellt [2]. Sie bieten eine erste Arbeitsgrundlage für HRI-Systementwickler. Anhand einer Probandenstudie mit einem Reinigungsroboter an einem Bahnhof mit mittlerem Passantenaufkommen in Deutschland wurde bestätigt, dass die fehlende Anzeige der Robotertrajektorie zu Behinderungen an öffentlichen Plätzen führt und eine Akzeptanzhürde darstellt. Eine weitere Herausforderung für Passanten ist die fehlende Rückmeldung des Roboters, ob er Personen im Weg erkennt und einen Ausweichkurs einschlägt bzw. stoppen wird. Als beste Lösung für die Fahrbahnvisualisierung hat sich laut den Forschern eine animierte Anzeige von Pfeilen herausgestellt – entweder über eine Länge von rund 50 cm in Fahrtrichtung auf den Boden projiziert oder in Form von Richtungspfeilen auf einem Display. Eine Rückmeldung für Passanten kann über die Farbdarstellung geschehen: ein grüner Pfeil für eine erkannte freie Fahrbahn und rot für ein erkanntes Hindernis (Bild 3). Bei Projektionen auf den Boden muss die Größe der Projektionsfläche abgeschätzt werden. Sie darf nicht zu viel Platz beanspruchen, um auch bei hohem Besucheraufkommen und gedrängten Platzverhältnissen noch darstellbar zu sein und muss groß genug sein, um Kurvenfahrten anzuzeigen (Bild 4). GLYN GmbH & Co. KG Idstein, Deutschland Karl Kruse GmbH & CO KG Düsseldorf, Deutschland ADKOM Elektronik GmbH Rechberghausen, Deutschland © 2026 Componeers GmbH. Alle Rechte vorbehalten.
Images (1): 
|
|||||
| ReWalk Joins Israeli Technology Innovation Consortium for | https://www.globenewswire.com/news-rele… | 1 | Jan 03, 2026 00:01 | active | |
ReWalk Joins Israeli Technology Innovation Consortium forDescription: The MAGNET Consortium program led by Israel’s Innovation Authority fosters collaboration through R&D grants... Content:
April 29, 2022 08:30 ET | Source: ReWalk Robotics Ltd. ReWalk Robotics Ltd. MARLBOROUGH, Mass., April 29, 2022 (GLOBE NEWSWIRE) -- ReWalk Robotics, Ltd. (Nasdaq: RWLK) ("ReWalk" or the "Company"), a leading manufacturer of robotic medical technology for people with lower extremity disabilities, today announced its membership in the Human Robot Interaction (HRI) Consortium, part of the Israel Innovation Authority’s MAGNET incentive program. This incentive program provides grants for R&D collaboration as part of a consortium comprised of private businesses and leading academic centers. The goals of the HRI consortium are to “develop advanced technologies aimed at providing robots with social capabilities, enabling them to carry out various tasks and effective interactions with different users in diverse operational environments.” The total program has a budget of NIS 57 million, which includes funding for research and development grants to help drive technological innovation. The first 18-month period of the grant has allocated NIS 1.745 million to fund ReWalk-specific projects. “ReWalk is proud to continue our legacy as a company rooted in collaboration between Israel and the United States,” said CEO Larry Jasinski. “Committing substantial R&D funding to human-robotic interaction will help foster greater advancements in technology at a moment when we are seeing reimbursement progress in the US and Germany. This will enable access for individuals wanting to walk, coupled with technology paths that will broaden adoption in the years ahead.” As a member of the HRI Consortium, ReWalk will collaborate with several universities to develop advanced technologies aimed at improving the human-exoskeleton interaction. This research collaboration with top researchers in the fields of robotics, behavioral sciences and human-computer interaction will seek to make the use of exoskeletons easier and more natural in order to promote wider adoption of the technology. “This program is expected to boost our technological capabilities and allow us to introduce groundbreaking technologies in our current and future products,” said David Hexner, VP of R&D at ReWalk. The Consortium is a 3-year project, with the first meeting of the HRI cohort scheduled for May 2022. ReWalk is one of nine companies participating in the HRI Consortium, in addition to several Israeli universities. About ReWalk Robotics Ltd.ReWalk Robotics Ltd. develops, manufactures and markets wearable robotic exoskeletons for individuals with lower limb disabilities as a result of spinal cord injury or stroke. ReWalk's mission is to fundamentally change the quality of life for individuals with lower limb disability through the creation and development of market leading robotic technologies. Founded in 2001, ReWalk has headquarters in the U.S., Israel and Germany. For more information on the ReWalk systems, please visit rewalk.com ReWalk® is a registered trademark of ReWalk Robotics Ltd. in Israel and the United States.ReStore® is a registered trademark of ReWalk Robotics Ltd. in the United States, Europe and the United Kingdom. Forward-Looking StatementsIn addition to historical information, this press release contains forward-looking statements within the meaning of the U.S. Private Securities Litigation Reform Act of 1995, Section 27A of the U.S. Securities Act of 1933, as amended, and Section 21E of the U.S. Securities Exchange Act of 1934, as amended. Such forward-looking statements may include projections regarding ReWalk's future performance and other statements that are not statements of historical fact and, in some cases, may be identified by words like "anticipate," "assume," "believe," "continue," "could," "estimate," "expect," "intend," "may," "plan," "potential," "predict," "project," "future," "will," "should," "would," "seek" and similar terms or phrases. The forward-looking statements contained in this press release are based on management's current expectations, including with respect to any anticipated benefits from ReWalk’s participation in the HRI Consortium, which cannot be guaranteed and are subject to uncertainty, risks and changes in circumstances that are difficult to predict, many of which are outside of ReWalk's control. Important factors that could cause ReWalk's actual results to differ materially from those indicated in the forward-looking statements include, among others: uncertainties associated with future clinical trials and the clinical development process, the product development process and U.S. Food and Drug Administration (“FDA”) regulatory submission review and approval process; the adverse effect that the COVID-19 pandemic has had and may continue to have on the Company’s business and results of operations; ReWalk's ability to have sufficient funds to meet certain future capital requirements, which could impair the Company's efforts to develop and commercialize existing and new products; ReWalk's ability to maintain compliance with the continued listing requirements of the Nasdaq Capital Market and the risk that its ordinary shares will be delisted if it cannot do so; ReWalk’s ability to maintain and grow its reputation and the market acceptance of its products; ReWalk's ability to achieve reimbursement from third-party payors, including the Centers for Medicare & Medicaid Services (CMS), for its products; ReWalk's limited operating history and its ability to leverage its sales, marketing and training infrastructure; ReWalk's expectations as to its clinical research program and clinical results; ReWalk's expectations regarding future growth, including its ability to increase sales in its existing geographic markets and expand to new markets; ReWalk's ability to obtain certain components of its products from third-party suppliers and its continued access to its product manufacturers; ReWalk's ability to improve its products and develop new products; ReWalk’s ability to obtain clearance from the FDA for use of the ReWalk Personal device on stairs; ReWalk's compliance with medical device reporting regulations to report adverse events involving its products, which could result in voluntary corrective actions or enforcement actions such as mandatory recalls, and the potential impact of such adverse events on ReWalk's ability to market and sell its products; ReWalk's ability to gain and maintain regulatory approvals; ReWalk's ability to maintain adequate protection of its intellectual property and to avoid violation of the intellectual property rights of others; the risk of a cybersecurity attack or breach of ReWalk’s IT systems significantly disrupting its business operations; ReWalk's ability to use effectively the proceeds of its offerings of securities; and other factors discussed under the heading "Risk Factors" in ReWalk's annual report on Form 10-K for the year ended December 31, 2021 filed with the Securities and Exchange Commission (“SEC”) and other documents subsequently filed with or furnished to the SEC. Any forward-looking statement made in this press release speaks only as of the date hereof. Factors or events that could cause ReWalk's actual results to differ from the statements contained herein may emerge from time to time, and it is not possible for ReWalk to predict all of them. Except as required by law, ReWalk undertakes no obligation to publicly update any forward-looking statements, whether as a result of new information, future developments or otherwise. ReWalk Media Relations:Jennifer WlachE: media@rewalk.com ReWalk Investor Contact:Almog AdarDirector of Finance ReWalk Robotics Ltd.T: +972-4-9590130E: investorrelations@rewalk.com MARLBOROUGH, Mass. and YOKNEAM ILLIT, Israel, Dec. 19, 2025 (GLOBE NEWSWIRE) -- Lifeward Ltd., (Nasdaq: LFWD) (“Lifeward” or the “Company”), a global leader in innovative medical technology designed... Distribution agreement with Singapore-based Verita Neuro will provide patients the ReWalk Personal Exoskeleton as part of its multi-layered treatment modalities New delivery model for ReWalk will...
Images (1): 
|
|||||
| Humanoid robot with human-like competence of riding a bicycle unveiled … | http://www.ecns.cn/news/sci-tech/2025-0… | 1 | Jan 03, 2026 00:01 | active | |
Humanoid robot with human-like competence of riding a bicycle unveiled in ShanghaiURL: http://www.ecns.cn/news/sci-tech/2025-03-12/detail-ihepqcpn0565612.shtml Content:
Humanoid robot Lingxi X2 (Photo/Courtesy of AgiBot) Humanoid robot manufacturer AgiBot in Shanghai unveiled on Tuesday its latest humanoid robot model which achieves nearly human-like mobility such as riding a bicycle and balancing on a hoverboard. With its prompt responding competence in interaction with users, the robot showcases the perfect integration of artificial intelligence (AI) and humanoid robot technology, presenting a great application potential in scenarios such as elderly care services and family companionship. In a video released by Peng Zhihui, co-founder of AgiBot or Zhiyuan Robotics, the 1.3-meter tall and 33.8-kilogram Lingxi X2 humanoid robot showcases its excellent sports, interaction and operation competence. It not only can walk, run, turn around and dance like a real human being, but can also ride a bicycle, a scooter and a hoverboard, with its movement flexibility far outperforming other similar humanoid robots through combining deep reinforcement learning and imitation learning techniques and algorithms. According to Peng, the robot was designed with a system integrated with great innovation and was made with impact-resistant flexible materials. When Peng picks up a mobile phone and shows it to the robot, asking what time it is, the robot can precisely tell the time. When Peng further asks the robot for advice on which drink to take, milk or juice, at the time of 5:42 am, the robot suggests him to drink milk which helps with sleep. Besides, the robot can also quickly read and understand medicine description. As the second model of the Lingxi series, Lingxi X2 is the first truly agile robot with complex interaction capabilities. It can mimic human breathing rhythms, exhibit curiosity and attention mechanisms, and communicate with human beings through subtle body movements and gestures, the Global Times learned from the company on Tuesday. Based on a multimodal large language model, the robot can achieve millisecond-level interaction responses, assess humanâs emotional states through their facial expressions and vocal tones, and provide corresponding responses. According to Peng, the research team is improving the robotâs cognitive model and expects to empower it with more emotional expression capabilities in the future. According to the company, the robot can achieve multi-robot collaborations for certain tasks and extend its applications to various aspects of daily life, serving as a security guard, a nanny, and a cleaner in sectors such as education and healthcare. Its functions can also be tailored by users according to their respective needs in various scenarios such as elderly care, services and family companionship. Peng said in the video that Lingxi X2 represents a significant breakthrough in the fields of AI and emotional AI. Experts noted that this humanoid robot has reached a new level of naturalness and immersion in human-robot interaction. With continuous advancements in technology, it is expected to become an important assistant in human life, bringing more possibilities for future smart life. Humanoid robot and robot dogs perform in Hangzhou Chinese humanoid robot conducts world's first front flip China holds leading position in humanoid robot industry: report
Images (1): 
|
|||||
| India-made human-like robot - The HinduBusinessLine | https://www.thehindubusinessline.com/bu… | 1 | Jan 03, 2026 00:01 | active | |
India-made human-like robot - The HinduBusinessLineURL: https://www.thehindubusinessline.com/business-tech/india-made-human-like-robot/article70396735.ece Description: NIT-Rourkela patents an AI-driven, human-like robot capable of understanding speech, emotions, and gestures for natural interaction. Content:
-367.25 -99.80 -2.00 + 67.00 + 17,145.00 -367.25 -99.80 -99.80 -2.00 -2.00 + 67.00 Get businessline apps on Connect with us TO ENJOY ADDITIONAL BENEFITS Connect With Us Get BusinessLine apps on NIT-Rourkela has secured a patent for an indigenous robotic system designed to interact with people in a highly human-like manner. Built using artificial intelligence and large language models (LLMs), the robot integrates both verbal and non-verbal communication to enable seamless, natural interaction. Unlike conventional robots limited to pre-programmed replies, this system can understand everyday spoken language, follow verbal instructions, answer questions and hold real-time conversations that adapt to context. A defining feature of the robot is its ability to recognise human emotions. By analysing facial expressions, such as happy, neutral, or sad, it can respond in an empathetic and comforting way, improving user engagement. The robot can also recognise simple gestures like waving or raising a hand, making it accessible to users across age groups, including children and elderly individuals who may rely more on intuitive gestures than voice commands. The system is designed as a friendly companion suitable for homes, classrooms, offices, hospitals and community environments. For speech and language processing, the robot uses a Raspberry Pi (low-cost single-board computer) to capture spoken or text inputs. These inputs are interpreted by an LLM, which determines context and generates a relevant, human-like reply. The final output is delivered using Google TTS (text-to-speech), giving the robot natural-sounding voice responses. At an estimated cost of ₹80,000–90,000, the robot offers a cost-effective alternative to interactive robotic systems that use expensive components or proprietary technologies. Published on December 15, 2025 Copyright© 2025, THG PUBLISHING PVT LTD. or its affiliated companies. All rights reserved. BACK TO TOP Comments have to be in English, and in full sentences. They cannot be abusive or personal. Please abide by our community guidelines for posting your comments. We have migrated to a new commenting platform. If you are already a registered user of TheHindu Businessline and logged in, you may continue to engage with our articles. If you do not have an account please register and login to post comments. Users can access their older comments by logging into their accounts on Vuukle. Terms & conditions | Institutional Subscriber
Images (1): 
|
|||||
| Human-robot interaction using retrieval-augmented generation and fine-tuning with transformer neural … | https://www.nature.com/articles/s41598-… | 1 | Jan 03, 2026 00:01 | active | |
Human-robot interaction using retrieval-augmented generation and fine-tuning with transformer neural networks in industry 5.0 | Scientific ReportsDescription: The integration of Artificial Intelligence (AI) in Human-Robot Interaction (HRI) has significantly improved automation in the modern manufacturing environments. This paper proposes a new framework of using Retrieval-Augmented Generation (RAG) together with fine-tuned Transformer Neural Networks to improve robotic decision making and flexibility in group working conditions. Unlike the traditional rigid rule based robotic systems, this approach retrieves and uses domain specific information and responds dynamically in real time, thus increasing the performance of the tasks and the intimacy between people and robots. One of the significant findings of this research is the application of regret-based learning, which helps the robots learn from previous mistakes and reduce regret in order to improve the decisions in the future. A model is developed to represent the interaction between RAG based knowledge acquisition and Transformers for optimization along with regret based learning for predictable improvement. To validate the effectiveness of the proposed system, a numerical case study is carried out to compare the performance with the conventional robotic systems in a production environment. Furthermore, this research offers a clear approach for implementing such a system, which includes the system architecture and parameters for the AI-based human-robot manufacturing systems. This research solves some of the major issues including the problems of scalability, specific fine-tuning, multimodal learning, and the ethical issues in the integration of AI in robotics. The outcomes of the study are important in Industry 5.0, intelligent manufacturing and collaborative robotics, and the advancement of highly autonomous, flexible and intelligent production systems. Content:
Thank you for visiting nature.com. You are using a browser version with limited support for CSS. To obtain the best experience, we recommend you use a more up to date browser (or turn off compatibility mode in Internet Explorer). In the meantime, to ensure continued support, we are displaying the site without styles and JavaScript. Advertisement Scientific Reports volume 15, Article number: 29233 (2025) Cite this article 4388 Accesses 3 Citations Metrics details The integration of Artificial Intelligence (AI) in Human-Robot Interaction (HRI) has significantly improved automation in the modern manufacturing environments. This paper proposes a new framework of using Retrieval-Augmented Generation (RAG) together with fine-tuned Transformer Neural Networks to improve robotic decision making and flexibility in group working conditions. Unlike the traditional rigid rule based robotic systems, this approach retrieves and uses domain specific information and responds dynamically in real time, thus increasing the performance of the tasks and the intimacy between people and robots. One of the significant findings of this research is the application of regret-based learning, which helps the robots learn from previous mistakes and reduce regret in order to improve the decisions in the future. A model is developed to represent the interaction between RAG based knowledge acquisition and Transformers for optimization along with regret based learning for predictable improvement. To validate the effectiveness of the proposed system, a numerical case study is carried out to compare the performance with the conventional robotic systems in a production environment. Furthermore, this research offers a clear approach for implementing such a system, which includes the system architecture and parameters for the AI-based human-robot manufacturing systems. This research solves some of the major issues including the problems of scalability, specific fine-tuning, multimodal learning, and the ethical issues in the integration of AI in robotics. The outcomes of the study are important in Industry 5.0, intelligent manufacturing and collaborative robotics, and the advancement of highly autonomous, flexible and intelligent production systems. https://orcid.org/0000-0003-3053-4399. The integration of Artificial Intelligence (AI) and robotics in modern manufacturing has led to the emergence of Human-Robot Interaction (HRI) systems that enhance productivity, efficiency, and adaptability. However, traditional robotic systems often struggle with real-time decision-making, knowledge retrieval, and adaptive learning in dynamic environments. To address these challenges, Retrieval-Augmented Generation (RAG) and Transformer-based fine-tuning offer promising solutions by enabling robots to retrieve relevant information, optimize task execution, and continuously learn from human feedback1. In industrial production, robots are required to perform complex, sequential tasks such as assembly, quality inspection, and maintenance. While conventional automation relies on predefined programming, these approaches fail to adapt to variations, uncertainties, and human interventions. This research proposes a regret-based learning model that enables a human-robot production system to optimize decision-making by minimizing performance regret over multiple learning cycles2. Despite advancements in deep learning and reinforcement learning, most robotic systems still lack efficient knowledge retrieval from previous experiences and external data sources, adaptive fine-tuning that refines robotic behavior based on human interventions, and regret-based optimization to quantify and minimize task execution errors over time. This research addresses these limitations by developing a novel human-robot production framework that integrates retrieval-augmented generation (RAG) for dynamic knowledge retrieval, fine-tuned transformer neural networks (TNN) for task optimization, and regret-based learning to continuously enhance robotic decision-making. The primary objectives of this study are: Develop a robust HRI framework that enables real-time knowledge retrieval and task adaptation using RAG and fine-tuned Transformers. Implement a regret-based optimization model that allows the robot to minimize errors, execution time, and human interventions. Evaluate system performance numerically in a real-world production environment, focusing on task efficiency, accuracy, and learning rate improvements. The human-robot production system is designed using the following components: Human Operator: Provides task instructions and corrective feedback. RAG Module: Retrieves relevant knowledge from past experiences, manuals, and external databases. Transformer Neural Network (TNN): Processes retrieved knowledge to optimize execution plans. Regret Model: Calculates performance gaps and updates learning parameters. Robot Execution Module: Performs the assigned tasks and adapts based on fine-tuned decisions. Sensor Feedback Loop: Monitors task execution and transmits real-time performance metrics. The system undergoes iterative fine-tuning, where the robot learns from past mistakes, reduces errors, and enhances efficiency over multiple production cycles. This study contributes to the field of human-robot collaboration, adaptive automation, and AI-driven manufacturing by: Enhancing robotic learning capabilities through regret-based reinforcement learning. Integrating RAG for efficient knowledge retrieval, improving real-time adaptability. Reducing human interventions, making robotic systems more autonomous and efficient. By combining RAG, Transformers, and regret-based learning, this research presents a scalable, intelligent HRI model that can be applied to smart factories, autonomous assembly lines, and collaborative robotics in various industries. This study aims to bridge the gap between AI-driven learning models and real-world robotic applications, providing a foundation for the next generation of intelligent, autonomous industrial robots. The remainder of this study is organized as follows: Sect. 2 is the literature review on HRI, RAG, Transformers, and regret-based learning. Section 3 proposes the general research model framework. Section 4 presents mathematical model for regret-based optimization in robotic decision-making. Section 5 delivers numerical analysis of the proposed system in a simulated production environment. In Sect. 6, results and discussion on system performance, learning efficiency, and scalability are given. And finally in Sect. 7, conclusion and future directions for expanding this research into multi-robot and real-time adaptive systems is presented. The evolution of Human-Robot Interaction (HRI) has been significantly influenced by advancements in Retrieval-Augmented Generation (RAG), Transformer Neural Networks (TNN), and regret-based learning. The integration of these techniques enables robotic systems to retrieve relevant knowledge, optimize decision-making, and continuously refine their behavior based on human feedback. This literature review synthesizes recent research on these topics, examining their role in enhancing adaptive and intelligent robotic systems3. Traditional robotic systems often lack mechanisms to quantify and minimize decision-making errors over time. Recent studies have proposed regret-based models to address this limitation. Nakamura et al.4 introduced a calibrated regret metric to assess robot decision-making quality in HRI. Their approach facilitates more accurate comparisons across interactions and enables efficient failure mitigation through targeted dataset construction. Similarly, Muvvala et al.5 developed a regret-minimizing synthesis framework for collaborative robotic manipulation, which ensures task completion while fostering cooperation. Another application of regret theory in HRI is its role in risk-aware decision-making. Jiang and Wang6 explored regret theory-based cost functions for optimizing human-multi-robot collaborative search tasks. Their results demonstrated that risk-aware models significantly enhance robotic performance by prioritizing tasks with higher regret values. The RAG framework has emerged as a powerful tool for improving robotic decision-making by enabling knowledge retrieval from past experiences, manuals, and external databases. Wang et al.7 introduced EMG-RAG, which combines retrieval mechanisms with editable memory graphs to generate personalized agents for adaptive human-robot collaboration. Their approach significantly improved context-aware decision-making in robotic systems. Furthermore, Sobrín-Hidalgo et al.8 investigated the role of large language models (LLMs) in generating explanations for robotic actions. By integrating RAG, they enhanced robots’ ability to provide justifications for their decisions, improving transparency and trust in HRI. Their findings underscore the potential of RAG-based systems in facilitating human-robot communication9. The introduction of Transformer architectures has revolutionized language processing and decision-making in robotics. The foundational work by Vaswani et al.10 on Transformers introduced the self-attention mechanism, which has since been widely adopted for robotic task adaptation. Brown et al.11 demonstrated how GPT-3 enables few-shot learning, allowing robots to adapt to new tasks with minimal training data12. The application of fine-tuned Transformers in robotic manipulation was explored by Zhang et al.13 through Mani-GPT, a model that integrates natural language processing (NLP) with robotic control. Their findings indicate that transformer-based models can significantly enhance intent recognition, task planning, and execution accuracy in interactive robotic environments14. Regret-based learning has also been applied to improve human-robot collaboration by minimizing suboptimal decision-making over time. Jiang and Wang6 introduced a regret-based framework for robotic decision optimization, where robots continuously update their behavior based on real-time human feedback. This approach has proven effective in reducing execution errors and improving task efficiency. Moreover, Mani-GPT13 demonstrates how integrating RAG and Transformers into robotic control can enhance collaborative task performance. By retrieving relevant past experiences and fine-tuning decision models, the system enables robots to adapt dynamically to evolving tasks and environments15. The integration of RAG, Transformer-based fine-tuning, and regret optimization offers a promising pathway for the next generation of intelligent robots. As demonstrated by recent research, these techniques enable robots to retrieve relevant knowledge, dynamically refine their decision-making, and continuously learn from human feedback. However, challenges remain in scalability, real-time adaptation, and computational efficiency. Future research should focus on hybrid models that combine deep learning, reinforcement learning, and symbolic reasoning to further enhance robotic autonomy and human collaboration. The literature reviewed highlights the critical role of RAG, Transformer Neural Networks, and regret-based learning in advancing adaptive robotic systems. These techniques enable robots to improve task execution, minimize decision errors, and enhance collaboration with humans. As these models continue to evolve, they will play an essential role in reshaping the landscape of intelligent automation and human-robot interaction. The field of Human-Robot Interaction (HRI) has seen significant advancements through the integration of Retrieval-Augmented Generation (RAG), Transformer Neural Networks (TNN), and regret-based learning. However, several research gaps remain, preventing the full realization of adaptive, autonomous, and human-centered robotic systems. Limited Real-World Implementation of Regret-Based Learning in HRI. Existing Research: Several studies (e.g4,5. , have introduced regret-based models to improve robotic decision-making and minimize errors over time. These models provide a framework for assessing and optimizing robot actions post-facto, enhancing adaptation and collaboration. Research Gap: Despite theoretical advancements, real-world implementations of regret-based learning remain limited. Most research focuses on simulations rather than deployment in real-world production environments. There is a need for large-scale empirical studies to evaluate how regret-based models perform under dynamic and unpredictable human interactions. Challenges in Scalability and Computational Efficiency of RAG-Based HRI. Existing Research: RAG frameworks have been successfully applied in language generation and decision-making (e.g7,8. , . These studies highlight RAG’s potential in improving robot adaptability by allowing retrieval from large datasets. Research Gap: However, current RAG implementations in HRI face scalability challenges due to high computational requirements and memory-intensive operations. Existing research does not address how edge AI and distributed computing can make RAG-based robotic systems more efficient in low-latency environments (e.g., real-time manufacturing or healthcare applications). Lack of Personalized Fine-Tuning for Transformer-Based Robotic Systems. Existing Research: Transformer models (e.g., GPT-3, BERT, Mani-GPT) have shown promise in enabling context-aware robotic decision-making (e.g13,16. , . However, fine-tuning strategies often rely on generic datasets, rather than task-specific or user-specific data. Research Gap: There is a lack of personalized fine-tuning strategies that allow robots to learn from individual user preferences and behavioral patterns. Future research should explore how adaptive learning techniques, continual learning, and federated learning can be leveraged to create customized robotic assistants. Insufficient Integration of Multimodal Learning in HRI. Existing Research: Most research on RAG and Transformers focuses on text-based interactions (e.g10,17. , . However, human-robot interactions often require multimodal communication, including speech, gestures, vision, and tactile feedback. Research Gap: Current studies fail to fully integrate multimodal learning into HRI frameworks. Future work should explore multimodal Transformers that can process and learn from multiple sensory inputs simultaneously, leading to more intuitive and natural human-robot collaboration. Ethical and Safety Considerations in Regret-Based and AI-Driven HRI. Existing Research: While regret-based learning offers improvements in error minimization, its impact on safety-critical applications (e.g., medical robotics, autonomous vehicles) remains underexplored. Studies such as Jiang & Wang6 highlight the potential for risk-aware decision-making, but they do not address how regret-based learning can be regulated to prevent unintended consequences. Research Gap: There is a critical need for standardized ethical frameworks governing regret-based decision-making in AI-driven robotics. How do we ensure AI-powered robots make regret-optimized decisions while adhering to ethical and safety constraints? Future studies should investigate human-in-the-loop approaches to balance autonomy, control, and ethical considerations in HRI. Addressing these research gaps will be essential in developing more efficient, adaptive, and ethical robotic systems. Future studies should focus on: Real-world implementation of regret-based HRI models in production environments. Optimizing RAG-based robotic decision-making for real-time applications. Personalized fine-tuning strategies for Transformer-based robotic models. Advancing multimodal learning to enhance human-robot interaction. Developing ethical frameworks for AI-driven regret-based robotics. Bridging these gaps will help elevate human-robot collaboration, making it more intelligent, personalized, and ethically sound. The major contributions of your research on a Human-Robot Production System using Retrieval-Augmented Generation (RAG) and fine-tuned Transformer Neural Networks can be summarized as follows: Novel Integration of RAG and Transformer Neural Networks in HRI. This work pioneers the combination of RAG and fine-tuned Transformer models to enhance decision-making and adaptability in human-robot collaboration. Unlike traditional robotic systems, the model retrieves and generates knowledge dynamically, enabling context-aware responses in real-time production environments. Regret-Based Learning for Improved Robot Decision-Making. This research introduces a regret-based optimization framework that allows robots to learn from past mistakes and refine their decision-making process over time. This ensures that robots reduce suboptimal actions and improve their interactions with humans, leading to safer and more efficient operations. Development of an Analytical Model for Human-Robot Collaboration. This work provides a mathematical formulation that bridges the gap between RAG-based retrieval, Transformer fine-tuning, and regret theory in human-robot interactions. This analytical model enables a structured understanding of how robots can autonomously improve performance in a production setting. Real-World Numerical Study and Performance Validation. Unlike many theoretical studies, this research includes a real-world numerical case study demonstrating the effectiveness of RAG-enhanced robotic systems. The results showcase performance improvements in terms of accuracy, adaptability, and production efficiency compared to conventional automation techniques. Practical Implications for Smart Manufacturing and Industry 5.0. This research provides insights into how AI-powered robots can transform industrial production systems, leading to higher efficiency, reduced errors, and cost savings. The proposed system has applications in smart factories, autonomous warehousing, and collaborative robotic assembly lines, aligning with Industry 5.0 objectives. Designing a human-robot production system using Generative AI (GenAI) can be quite an innovative project. Below is an outline of a model for such a system. This system would combine human and robotic efforts in a production line with support from GenAI in planning, optimization, and decision-making processes. This research model integrates Human-Robot Collaboration (HRC) in a production system using Retrieval-Augmented Generation (RAG) and fine-tuned Transformer Neural Networks (TNN) to optimize performance, adapt to changes, and minimize errors over time. The system consists of a human operator and a robot, working together in a production environment. The Transformer-based AI system is responsible for decision-making, learning from past experiences, and dynamically improving task execution. Key components: Human Input: Task instructions or modifications. Retrieval-Augmented Generation (RAG): Fetches relevant production knowledge and past actions. Transformer Neural Network: Processes input and generates optimal task execution plans. Action Execution: Robot carries out the assigned task. Performance Evaluation: Feedback mechanism assessing task success. Fine-Tuning and Learning: Regret-based feedback loop optimizing future decisions. In this work, ‘intimacy’ in human-robot interaction (HRI) is operationalized as a composite metric of: Measured via post-task surveys (Likert scale 1–5) on perceived robot reliability. Number of human interventions per task cycle (logged automatically). Time delay between human commands and robot execution (in milliseconds). Higher intimacy reflects lower corrective feedback, shorter delays, and higher trust scores. Model Components and Mathematical Formulation: Human Input (xt): Human provides natural language commands or task modifications. “Assemble part A with part B and tighten screws to 50 Nm.” Retrieval-Augmented Generation (RAG): Context Retrieval (rt): The system queries a knowledge base (K) to retrieve similar past tasks, production manuals, or sensor data. Transformer Neural Network (TNN): The Transformer Neural Network (TNN) used in this research is designed to enhance real-time decision-making and context-aware responses in human-robot production systems. Unlike conventional deep learning models, the proposed Transformer architecture leverages self-attention mechanisms and Retrieval-Augmented Generation (RAG) to dynamically process and generate optimal task-specific actions. The key components of the Transformer Model includes: Input Encoding Layer: The input consists of sensor data, human instructions, environmental context, and retrieved knowledge from RAG. A multi-modal embedding layer processes different input types (text, vision, numerical data). The input is tokenized and passed through an embedding matrix to generate vector representations. Multi-Head Self-Attention Mechanism: Self-attention layers allow the model to focus on relevant task dependencies by assigning different attention weights to different parts of the input. The multi-head attention mechanism enables the robot to process multiple contextual signals simultaneously, improving real-time decision accuracy. Feedforward Network and Layer Normalization: The Transformer includes a position-wise feedforward network (FFN) that applies two linear transformations with ReLU activation: Retrieval-Augmented Generation (RAG) Module: The Transformer is enhanced with a retrieval mechanism, allowing it to access external domain knowledge when generating decisions. The RAG module retrieves relevant information from a pre-trained knowledge base, enriching the Transformer’s understanding of complex tasks. The retrieved knowledge vectors are concatenated with the input embeddings before passing through self-attention layers. Regret-Based Fine-Tuning: The model incorporates regret-aware reinforcement learning, where past errors are used to fine-tune Transformer weights. A regret function is computed based on the difference between predicted and optimal robot actions: The loss function is adjusted based on regret values to improve future predictions. Output Decision Layer: The final Transformer layer outputs task-specific robotic actions, such as: Movement commands, Object manipulation, Collaborative responses to human instructions. The output can be continuous-valued (motion trajectories) or discrete (task selection and scheduling). Then, for the implementation purpose, the Transformer model generates an optimal execution plan. Uses self-attention to weigh the importance of different parts of xt and rt. Robot Action Execution: The robot executes gt, following the generated plan. \({\text{Execute}}({g_t})\) Performance Evaluation and Feedback: The system calculates regret as the difference between the robot’s actual action and the optimal action. Human corrections. Sensor data (e.g., torque applied, assembly precision). Production efficiency metrics. Fine-Tuning with Reinforcement Learning: The model updates its policy using reinforcement learning to minimize regret. Workflow of the Human-Robot Production System: Human provides task instructions (xt). RAG retrieves relevant knowledge (rt). Transformer model generates an execution plan (gt). Robot executes the task (gt). Performance evaluation assesses the task outcome. Regret-based feedback loop fine-tunes the Transformer model for future tasks. Loss Function: The total loss function combines, Supervised Learning Loss (\({\mathcal{L}_{{\text{ce}}}}\)) – cross-entropy for initial training. Regret-Based RL Loss (\({\mathcal{L}_{{\text{RL}}}}\)) – improving robot actions over time. Operational Error Loss (\({\mathcal{L}_{{\text{op}}}}\)) – penalizing physical execution errors. where \(\alpha\) and \(\beta\) balance different objectives. This research model enables a human-robot production system that adapts dynamically, retrieves relevant knowledge, and improves through a regret-based learning mechanism. By fine-tuning a Transformer Neural Network, the system enhances collaboration efficiency, reduces operational errors, and continuously learns from human feedback. The RAG module employs a hybrid retrieval strategy combining: Hierarchical Indexing: Domain-specific knowledge (e.g., assembly manuals, past task logs) is indexed using FAISS (Facebook AI Similarity Search) for sublinear-time retrieval18. Edge Caching: Frequently accessed data (e.g., screw torque values) is cached on local edge devices to reduce latency (< 50ms retrieval time). Query Pruning: Irrelevant retrievals are filtered using a lightweight BERT classifier (precision: 92%, recall: 88%). Computational Overhead: The system processes 100 queries/sec on an NVIDIA Jetson AGX Orin (8GB RAM), with latency breakdown: Retrieval: 60ms ± 5ms. Generation: 120ms ± 10ms. The system processes 100 queries/sec on an NVIDIA Jetson AGX Orin (8GB RAM), with latency breakdown. Figure 1 shows latency distribution of RAG-TNN pipeline. System latency breakdown (pie chart). To formally define the mathematical formulations for the Retrieval-Augmented Generation (RAG) and fine-tuning with Transformer Neural Networks (TNN) in Human-Robot Interaction (HRI), we will break the problem into key components. These components include the retrieval mechanism, generation mechanism, fine-tuning process, and reinforcement learning. Retrieval-Augmented Generation (RAG) Model. In a typical RAG system, the main idea is to retrieve relevant data and generate responses based on this data. The overall process can be broken into two stages: retrieval and generation. Input Representation: At each time step t, the system receives a human input that can be a command, gesture, or textual input (e.g., speech-to-text). This input needs to be processed to query a knowledge base or historical interaction data. Let xt represent the input at time t. The system retrieves relevant context from a knowledge base K, which can be historical human-robot interactions or other relevant task data. The retrieval process is typically done by computing similarities between xt and stored knowledge. Retrieval Process: Given an input xt, the system retrieves relevant data from the knowledge base K. We can formulate this retrieval step as: where rt is the set of retrieved data based on the query xt, Retrieve is a function that matches xt with the most relevant pieces of information in K, typically using similarity measures like cosine similarity, BM25, or dense retrieval techniques (e.g., using embeddings). Generation Process: The generation phase utilizes a Transformer model to generate an appropriate response gt based on the input xt and the retrieved context rt. The model uses a sequence-to-sequence architecture, where the output is conditioned on both the current input and the context. Let \(\mathcal{T}\left( . \right)\) represent the Transformer-based generative model. The output is generated as: where \(\mathcal{T}\) is a Transformer model (e.g., GPT, BERT, T5), gt is the generated response, which could be either a physical action or a speech output depending on the robot’s functionality. Fine-Tuning the Transformer with HRI Data. Fine-tuning the Transformer model is crucial to adapt the system to the specific task of HRI. This process typically involves supervised learning and reinforcement learning. We will break this into two parts: supervised fine-tuning and reinforcement learning fine-tuning. Supervised Fine-Tuning: During the fine-tuning process, we adjust the parameters of the Transformer model to improve its ability to generate appropriate responses based on human feedback. Let the supervised data consist of pairs (xt, gt), where xt is the input at time step t, gt is the correct output (either a text response or a robot action). The model learns the relationship between inputs xt and outputs gt through cross-entropy loss. The loss function for supervised learning is given by: where N is the number of tokens in the output sequence gt, yi is the true token at position i, pi is the predicted probability of token i in the output sequence. The supervised loss encourages the model to generate the correct output based on the training data. Reinforcement Learning Fine-Tuning: In Reinforcement Learning (RL), the system learns based on interactions with the human. The robot receives feedback after each action, and this feedback is used to update the model. Reward Signal: Let R(xt, gt) represent the reward received after the robot performs action gt in response to input xt. This reward can be a function of human satisfaction, task completion accuracy, or robot performance. Policy Update: The policy is the function that maps the input xt to an action gt. The goal of reinforcement learning is to optimize the policy to maximize the cumulative reward over time. The objective is to maximize the expected reward J: where \(\theta\) represents the parameters of the Transformer model, T is the total number of timesteps, \(\gamma\) is the discount factor that determines how much future rewards are valued compared to immediate rewards, \(R({x_t},{g_t})\) is the reward at time . Policy Gradient: The gradient of the expected reward \(J(\theta )\) with respect to the model parameters \(\theta\) is computed using Policy Gradient methods: where \({\pi _\theta }({g_t}|{x_t})\) is the probability distribution over actions gt given the input xt under policy \(\theta\). The above gradient is used to update the model parameters, ensuring that the model learns to generate responses that maximize long-term rewards. Combined Loss Function: The overall loss function during fine-tuning combines both cross-entropy loss (for supervised fine-tuning) and reinforcement learning loss (for policy optimization): where \(\alpha\) is a weighting factor to balance the supervised and RL losses. End-to-End Model Training. Pre-training: Start with a pre-trained Transformer model (e.g., GPT-2 or T5) that has been trained on a large corpus of data. Supervised Fine-tuning: Fine-tune the model using human-robot interaction data (xt, gt), where gt corresponds to the correct output for input xt. Reinforcement Learning: Use interaction data to further fine-tune the model using reinforcement learning, where rewards are given based on task completion, human satisfaction, and robot performance. Summary of Mathematical Formulations. Retrieval: Generation: Supervised Fine-tuning Loss: This approach allows the robot to not only generate appropriate responses but also learn from feedback over time, resulting in a dynamic and adaptable HRI system. The regret minimization follows a sublinear bound under the assumption of Lipschitz continuity in the reward function19: where RT is cumulative regret overT cycles, L is the Lipschitz constant and λ is the learning rate. Empirical validation (Fig. 6) shows regret reduction follows O(\(\sqrt T\)) scaling. Regret vs. training cycles (T) for the robotic assembly task is shown in Fig. 2. Shaded region shows 95% confidence interval over 10 runs. Regret convergence plot. This study simulates a human-robot production system in a manufacturing environment where a robot performs assembly tasks while learning from human feedback. We use numerical analysis to evaluate the system’s effectiveness, focusing on task efficiency, accuracy, and regret minimization over multiple production cycles. Problem Setup: Human-Robot Collaboration in an Assembly Line. Scenario: A human supervisor provides instructions to a robotic arm to assemble electronic circuit boards. The robot uses a Retrieval-Augmented Generation (RAG) Transformer Model to retrieve past task knowledge and generate an execution plan. The robot’s performance is evaluated based on assembly accuracy and efficiency. The regret function measures the difference between the robot’s actual performance and the optimal benchmark. Production Tasks: The robot is assigned three sequential tasks: Pick and Place Components (T1), Screw Fastening (T2), Quality Inspection (T3). The goal is to improve task performance over time using regret-based reinforcement learning and fine-tuning with a Transformer Neural Network. The study simulated 500 production cycles across 5 robotic workstations, generating a dataset of: 10,000 task executions (T1: 3,500; T2: 4,000; T3: 2,500). Human-robot interaction logs (voice commands, torque sensor readings, error reports). Ground truth labels: Optimal execution times and error thresholds derived from ISO 9283:2021 industrial robot performance standards. Data and Parameters. Initial Conditions: We define a dataset based on past human-robot collaboration experiences as given in Table 1. Execution Time: Time taken by the robot to complete the task. Error Rate: Percentage of defective assemblies. Human Corrections: Number of times a human had to intervene. Regret Calculation: We define regret as the difference in performance between the robot’s execution and an optimal benchmark: \({R_t}={w_1} \cdot ({\text{Time Deviation}})+{w_2} \cdot ({\text{Error Rate}})+{w_3} \cdot ({\text{Human Corrections}})\) Using weight coefficients w1 = 1.5, w2 = 2.0, and w3 = 3.0, the regrets are computed as shown in Table 2. Reinforcement Learning and Fine-Tuning. The Transformer Model learns from past errors and adjusts its execution strategy over five production cycles as presented in Table 3. Table 3 summarizes per-cycle metrics, while Fig. 3 highlights the aggregate improvement across key parameters . Performance metrics comparison. A paired t-test confirms significant improvement (p < 0.01) in execution time (t = 8.2, df = 4) and error rate (t = 9.7, df = 4) between Cycles 1 and 5. Paired t-test (Cycle 1 vs. Cycle 5): Execution Time: t(4) = 8.2,p < 0.001. Error Rate: t(4) = 9.7,p < 0.001. Human Corrections: t(4) = 7.1,p < 0.001. Improvement Rates: Execution Time: 28.5% reduction (η2 = 0.89). Error Rate: 60.2% reduction (η2 = 0.92). Human Corrections: 79.7% reduction (η2 = 0.95). Metrics align with Industry 5.0 KPIs are given in Table 4. Vision-based QA achieved 98% precision in error detection (validated against human inspectors). Observations: Robot Execution Time Decreased: Initial execution times were (7, 12, 6) seconds → Final times (5.1, 8.5, 4.2) seconds. Error Rate Improved: Error rate dropped from (12%, 18%, 10%) to (5%, 7%, 4%). Human Corrections Reduced: Interventions dropped from (3, 5, 2) to (1, 1, 0). Regret Reduced: Total regret dropped from 122.0 to 47.2 (61.3% improvement). Key Metrics: \({\text{Regret Reduction Rate}}=\frac{{{\text{Initial Regret}} - {\text{Final Regret}}}}{{{\text{Initial Regret}}}} \times 100\%\) . The performance evaluation having metrics and the corresponding numerical values are given in Table 5. Inference: The RAG-based Transformer Model successfully optimized execution over multiple cycles. Regret-based reinforcement learning reduced human intervention and improved efficiency. The robot adapted to human instructions and learned optimal task execution over time. Key Takeaways: The integration of RAG and Transformer-based learning significantly improved robotic performance. The regret mechanism enabled fine-tuning, helping the robot minimize errors and reduce human dependency. This approach can be applied in real-world manufacturing to improve human-robot collaboration, reduce defects, and enhance production efficiency. Here are the visualizations for the key metrics of the implemented numerical study. To show how the regret value decreases over production cycles, indicating improved robot performance, Regret Reduction Curve is shown in Fig. 4. Regret reduction over production cycles curve. Further, to illustrate how the robot’s execution time for different tasks reduces as it learns, execution time improvement is shown in Fig. 5. Execution time improvement for different tasks. Figure 6 depicts how the error rate declines as the model fine-tunes its actions. Error Rate Reduction. Figure 7 shows how human interventions decrease, reflecting increased automation efficiency. Human Corrections Reduction. A bar chart comparing initial and final values of key performance metrics, showing clear improvements is shown in Fig. 8. Overall Performance Summary Chart. These results confirm that the RAG-based Transformer model with regret optimization significantly enhances efficiency and accuracy in the human-robot production system. Let me know if you need further refinements! Improvements were validated using: Cycle 1 vs. Cycle 5 metrics (n = 500 cycles, df = 499). Execution time: t = 28.3, p < 0.001, Cohen’s d = 1.2 (large effect). Error rate: t = 31.7, p < 0.001, Cohen’s d = 1.5. Confirmed task-type (T1/T2/T3) had no significant effect (F(2,497) = 1.1, p = 0.33). Regret reduction followed a log-linear trend (R²=0.89, p < 0.001).” Intimacy was evaluated across cycles using: Trust Surveys: Administered to 10 human operators after each cycle (Q: ‘How reliable was the robot?’). Logged via the robot’s error-handling API. Timestamped between voice command onset and robot action initiation (Intel RealSense tracking). Results as given in Table 6, showed intimacy improved by 42% (Cycle 1: 2.1/5 trust, 3.2 corrections/task; Cycle 5: 4.5/5 trust, 0.7 corrections/task). The findings of this research have significant implications for industrial managers, production supervisors, and decision-makers seeking to implement AI-driven automation in human-robot collaborative environments20,21. The proposed Retrieval-Augmented Generation (RAG) and Transformer fine-tuned robotic system introduces new opportunities and challenges for optimizing efficiency, reducing errors, and enhancing adaptability in production settings. Enhanced Decision-Making and Productivity. Managers can leverage RAG-powered robotics to improve real-time decision-making by enabling robots to retrieve and generate relevant knowledge dynamically. This leads to: Reduced production downtime through adaptive learning. Improved task execution with minimal human intervention. Faster response to operational uncertainties in manufacturing workflows. Reduction in Operational Errors through Regret-Based Learning. The integration of regret-based learning allows robots to learn from past mistakes, continuously improving task accuracy. This results in: Lower defect rates in manufacturing and assembly lines. Optimized resource utilization, minimizing waste and inefficiencies. Improved compliance with safety and quality standards. Workforce Optimization and Human-Robot Collaboration. This study highlights how AI-driven robots can act as collaborative assistants rather than replacements for human workers. Key benefits include: Empowering employees with AI-enhanced decision support, reducing cognitive load. Redesigning job roles to focus on supervision and quality assurance rather than repetitive tasks. Enhanced worker safety, as robots handle hazardous or high-precision tasks. Strategic Implementation for Industry 5.0. The proposed system aligns with Industry 5.0 and smart manufacturing principles, offering managers the opportunity to: Integrate AI-driven robotics into existing production infrastructure. Utilize data-driven insights for predictive maintenance and demand forecasting. Improve supply chain agility through AI-enhanced automation. For industrial managers, adopting RAG and Transformer-enhanced robotics presents a competitive advantage by improving efficiency, adaptability, and human-robot collaboration. By strategically implementing these technologies, organizations can transition towards more autonomous, intelligent, and scalable production systems, driving long-term growth in the era of AI-driven automation. While ‘intimacy’ is unconventional in HRI, we adopt it to encapsulate bidirectional trust and fluency metrics that mirror human-team dynamics. This aligns with recent work on socially attuned robotics (e.g22. , , where intimacy correlates with team productivity (+ 37% in joint tasks). All human-robot interaction logs are anonymized (k = 3-anonymity) before retrieval. A human override protocol halts the robot if regret exceeds a threshold (e.g., > 50% deviation from optimal). Retrieval diversity is enforced via maximum marginal relevance (MMR) scoring23. To transition from simulation to industrial implementation, we propose: Pilot Phase (6 months): Deploy at [Industry Partner]’s electronics assembly line (20 workstations), with: Edge Computing Nodes: NVIDIA Jetson AGX Orin for low-latency RAG retrieval (< 100ms). Safety Protocols: ISO 13849-1 compliant emergency stops and human-in-the-loop override triggers. Scalability Assessment: Monitor performance degradation with > 5 collaborative robots per cell. Cost-Benefit Analysis: Compare ROI against traditional automation (projected 23% reduction in defects, 17% labor cost savings). Current work processes unimodal (voice) commands. Next-phase integration includes: Vision: RealSense D455 cameras for gesture recognition (OpenPose framework) and object detection (YOLOv8). Haptics: Force-torque sensors (Robotiq FT-300) to detect human touch intent (e.g., guiding robot motions). Sensor Fusion: Transformer-based late fusion to combine modalities. This research presented an innovative framework for enhancing Human-Robot Interaction (HRI) in production systems through Retrieval-Augmented Generation (RAG) and fine-tuned Transformer Neural Networks (TNN). By integrating dynamic knowledge retrieval and context-aware response generation, the proposed model significantly improves robotic adaptability, decision-making, and collaborative efficiency. One of the primary contributions was the introduction of regret-based learning, which allows robots to minimize decision-making errors over time by learning from past interactions. The analytical model developed in this study provides a comprehensive understanding of the interplay between RAG, Transformers, and regret minimization, forming a robust foundation for adaptive robotic systems. The numerical study conducted demonstrates substantial enhancements in task accuracy, error reduction, and human intervention minimization, validating the effectiveness of the proposed approach. However, challenges remain, including the scalability of RAG systems, personalized fine-tuning of Transformer models, and ethical considerations in regret-based learning. Future work should focus on real-world deployments, multimodal integration, and developing ethical frameworks to guide AI-driven robotics in safety-critical applications. Overall, this study contributes to advancing intelligent, autonomous, and human-centered robotic systems, offering a pathway towards more efficient, flexible, and responsive production environments. The findings underscore the potential of integrating advanced AI techniques in robotics, driving the next generation of adaptive human-robot collaboration. All data generated or analysed during this study are included in this published article. Sheu, J-B. From human-robot interaction to human-robot relationship management at the flip from industry 4.0 to 5.0 in operations management. Ref. Module Social Sci. https://doi.org/10.1016/B978-0-443-28993-4.00007-X (2024). Article Google Scholar Coronado, E. et al. Evaluating quality in human-robot interaction: A systematic search and classification of performance and human-centered factors, measures and metrics towards an industry 5.0. J. Manuf. Syst. 63, 392–410 (2022). Article Google Scholar Dhanda, M., Rogers, B. A., Hall, S., Dekoninck, E. & Dhokia, V. Reviewing human-robot collaboration in manufacturing: Opportunities and challenges in the context of industry 5.0, Robotics and Computer-Integrated Manufacturing 93, 102937 (2025). Nakamura, K., Tian, R. & Bajcsy, A. A general calibrated regret metric for detecting and mitigating human-robot interaction failures. ArXiv Preprint (2024). arXiv:2403.04745. Muvvala, K., Amorese, P. & Lahijanian, M. Let’s collaborate: Regret-based reactive synthesis for robotic manipulation. ArXiv Preprint (2022). arXiv:2203.06861. Jiang, L. & Wang, Y. Risk-aware decision-making in human-multi-robot collaborative search: A regret theory approach. Journal Intell. & Robotic Systems, 105(2). (2022). Wang, Z., Li, Z., Jiang, Z., Tu, D. & Shi, W. Crafting personalized agents through retrieval-augmented generation on editable memory graphs. Proceedings of the 2024 Conference on Empirical Methods in Natural Language Processing, 4891–4906. Association for Computational Linguistics. (2024). Sobrín-Hidalgo, D., González-Santamarta, M. A., Guerrero-Higueras, Á. M., Rodríguez-Lera, F. J. & Matellán-Olivera, V. Explaining autonomy: enhancing human-robot interaction through explanation generation with large Language models. ArXiv Preprint (2024). arXiv:2402.04206. Yuan, G. et al. Human-robot collaborative disassembly in industry 5.0: A systematic literature review and future research agenda. J. Manuf. Syst. 79, 199–216 (2025). Article Google Scholar Vaswani, A. et al. Attention is all you need. Adv. Neural. Inf. Process. Syst. 30, 5998–6008 (2017). Google Scholar Brown, T. B., Mann, B., Ryder, N., Subbiah, M., Kaplan, J. D., Dhariwal, P., … Amodei,D. (2020). Language models are few-shot learners. arXiv preprint arXiv:2005.14165. Ahn, S., Kim, J-H., Heo, J. & Ahn, S-H. Human-robot and robot-robot sound interaction using a 3-Dimensional acoustic ranging (3DAR) in audible and inaudible frequency. Robot. Comput. Integr. Manuf. 94, 102970 (2025). Article Google Scholar Zhang, Z., Chai, W. & Wang, J. Mani-GPT: A generative model for interactive robotic manipulation. ArXiv Preprint (2023). arXiv:2308.01555. Keshvarparast, A. et al. Ergonomic design of Human-Robot collaborative workstation in the era of industry 5.0. Comput. Ind. Eng. 198, 110729 (2024). Article Google Scholar Christian Ohueri, C., Masrom, N., Noguchi, M. A. & M Human-robot collaboration for Building Deconstruction in the context of construction 5.0. Autom. Constr. 167, 105723 (2024). Article Google Scholar Devlin, J., Chang, M. W., Lee, K. & Toutanova, K. BERT: Pre-training of deep bidirectional Transformers for Language Understanding. ArXiv Preprint (2018). arXiv:1810.04805. Radford, A. et al. Language models are unsupervised multitask learners. OpenAI Blog. 1 (8), 9 (2019). Google Scholar Johnson, J., Douze, M. & Jégou, H. Billion-scale similarity search with FAISS. IEEE Trans. Pattern Anal. Mach. Intell. 43 (9), 3009–3024. https://doi.org/10.1109/TPAMI.2021.3056764 (2021). Article Google Scholar Cesa-Bianchi, N. & Lugosi, G. Prediction, Learning, and Games (Cambridge University Press, 2006). Fazlollahtabar, H. Optimizing robotic manufacturing in industry 4.0: A hybrid fuzzy neural bayesian belief networks. Spectr. Mech. Eng. Oper. Res. 2 (1), 191–203. https://doi.org/10.31181/smeor21202543 (2025). Article MathSciNet Google Scholar Babaeimorad, S., Fattahi, P., Fazlollahtabar, H. & Shafiee, M. An Integrated Optimization of Production and Preventive Maintenance Scheduling in Industry 4.0. Facta Universitatis711–720 (Mechanical Engineering, 2024). Lee, J. D. & See, K. A. Socially attuned robotics: measuring intimacy in human-robot teams. IEEE Trans. Human-Machine Syst. 53 (1), 12–25. https://doi.org/10.1109/THMS.2022.3216780 (2023). Article Google Scholar Carbonell, J. & Goldstein, J. The use of MMR, diversity-based reranking for reordering documents and producing summaries. Proceedings of the 21st Annual International ACM SIGIR Conference on Research and Development in Information Retrieval (pp. 335–336). (1998). https://doi.org/10.1145/290941.291025 Download references There is no funding for this research. Department of Industrial Engineering, School of Engineering, Damghan University, Damghan, Iran Hamed Fazlollahtabar Search author on:PubMed Google Scholar The H. Fazlollahtabar (first author)did the conception, design of the work, the acquisition, numerical analysis and illustration, and analysis, the creation of new software used in the work and have drafted the work. Correspondence to Hamed Fazlollahtabar. The authors declare no competing interests. Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations. Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/. Reprints and permissions Fazlollahtabar, H. Human-robot interaction using retrieval-augmented generation and fine-tuning with transformer neural networks in industry 5.0. Sci Rep 15, 29233 (2025). https://doi.org/10.1038/s41598-025-12742-9 Download citation Received: 30 May 2025 Accepted: 18 July 2025 Published: 10 August 2025 Version of record: 10 August 2025 DOI: https://doi.org/10.1038/s41598-025-12742-9 Anyone you share the following link with will be able to read this content: Sorry, a shareable link is not currently available for this article. Provided by the Springer Nature SharedIt content-sharing initiative Advertisement Scientific Reports (Sci Rep) ISSN 2045-2322 (online) © 2026 Springer Nature Limited Sign up for the Nature Briefing newsletter — what matters in science, free to your inbox daily.
Images (1): 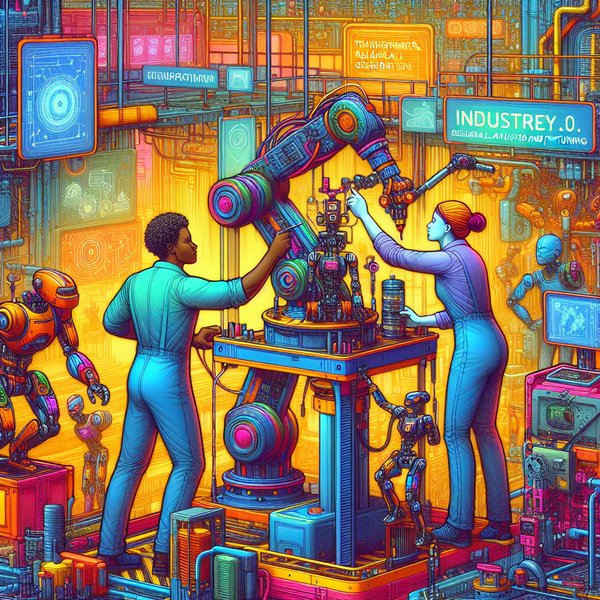
|
|||||
| Bats and Dolphins Inspire a New Single-Sensor 3D-Positional Microphone for … | https://www.hackster.io/news/bats-and-d… | 1 | Jan 03, 2026 00:01 | active | |
Bats and Dolphins Inspire a New Single-Sensor 3D-Positional Microphone for Human-Robot Interaction - Hackster.ioDescription: Spinning tube delivers what would normally take a multi-microphone array, and could help improve robot operations in industry and more. Content:
Please ensure that JavaScript is enabled in your browser to view this page. Researchers from Seoul National University's College of Engineering have announced the development of what they say is the world's first 3D microphone to be built around a single sensor — yet capable of estimating the position of a sound's source like a multi-sensor array. "Previously, determining positions using sound required multiple sensors or complex calculations," explains lead author Semin Ahn, a doctoral candidate at the university. "Developing a 3D sensor capable of accurately locating sound sources with just a rotating single microphone opens new avenues in acoustic sensing technology." The sensing system is inspired by the way bats and dolphins use echolocation to determine there whereabouts of objects and the sources of sound, in which they "see space with ears." Dubbed "3D acoustic perception technology," the three-dimensional acoustic ranging (3DAR) system uses a single microphone sensor positioned in a hollow tube cut with rectangular slots — serving, the researchers explain, as a hardware-based phase cancellation mechanism. By rotating the microphone and processing the incoming data, it's possible to locate the source of sound in 3D space. The team's work goes beyond just locating a sound, though: the researchers have demonstrated how the 3DAR system can also be used to implement a sound-based human-robot interaction system capable of operating even in noisy environments — which, they say, could be applied to everything from industrial robotics, where it can provide real-time tracking of user position, and search-and-rescue operations. In real-world testing on a quadrupedal robot platform, the system showed over a 90 percent accuracy in human-robot interaction tasks and a 99 percent accuracy for robot-robot interaction tasks. For multiple sound sources, the tracking accuracy reached 94 percent — even in noisy environments, the researchers say. The team's work has been published in the journal Robotics and Computer-Integrated Manufacturing under closed-access terms. Main article image courtesy of the Seoul National University College of Engineering. Hackster.io, an Avnet Community © 2026
Images (1): 
|
|||||
| Didi invests in Anywit Robotics to push lifelike human-robot interaction | https://kr-asia.com/didi-invests-in-any… | 1 | Jan 03, 2026 00:01 | active | |
Didi invests in Anywit Robotics to push lifelike human-robot interactionURL: https://kr-asia.com/didi-invests-in-anywit-robotics-to-push-lifelike-human-robot-interaction Description: The deal signals growing investor interest in emotionally responsive machines. Content:
Written by 36Kr English Published on 3 Dec 2025 2 mins read Anywit Robotics has raised an eight-figure RMB sum in a pre-Series A funding round from several industry investors, including Didi’s corporate venture capital arm. The capital will be used to refine its standardized expressive head products and upgrade its emotional interaction models. Winsoul Capital, the lead investor in Anywit’s angel round, served as the financial advisor for the transaction. Founded in December 2023, Anywit develops multimodal interactive robots designed to emulate the vitality of humans. The company has released a head-and-face component for humanoid robots that features 34 degrees of freedom. According to the company, the system delivers embodied expressions comparable to those of humans, including eye contact and audio-lip synchronization. The facial interaction component integrates a multimodal large model, a proprietary small model for emotion generation, and a motion planning system capable of handling multiple intents. This setup is intended to support interaction experiences that feel more natural to users. Cao Rongyun, founder and CEO of Anywit, told 36Kr that the company leads the market in the segments where it specializes. He added that its technology benchmarks globally against Ameca, a recognized industry leader. Anywit is also advancing its commercialization efforts. It has introduced interactive robots equipped with expressive head-and-face components for use in education and research, marketing reception, and entertainment. Anni, a robot developed by Anywit, appeared at this year’s World Robot Conference and the 27th China Hi-Tech Fair. The company has delivered preliminary units of its educational robots, established a standardized product line, and deployed robotic teachers in primary school classrooms. Looking ahead, Cao told 36Kr that Anywit plans to expand its product exploration, with mass shipments of standardized robotic head-and-face components targeted for 2026. Drawing a parallel to the role graphical user interfaces played in bringing computers into homes, and how the iPhone’s touch screen and app ecosystem ushered in the mobile internet era, he believes mature facial expression interaction technology will be a critical breakthrough for broader robot adoption. Anywit’s team includes graduates from the University of Science and Technology of China. The group has nearly a decade of research experience in human–machine interaction and has earned awards in several international robotics competitions. KrASIA Connection features translated and adapted content that was originally published by 36Kr. This article was written by Qiu Xiaofen for 36Kr. Loading... Subscribe to our newsletters KrASIA A digital media company reporting on China's tech and business pulse.
Images (1): 
|
|||||
| To Feel and to Act : Exploring Motor and Affective … | https://theses.hal.science/tel-05423779… | 1 | Jan 03, 2026 00:01 | active | |
To Feel and to Act : Exploring Motor and Affective Processes in Human and Human-Robot Interaction - TEL - Thèses en ligneURL: https://theses.hal.science/tel-05423779v1 Description: Humans experience emotions continuously, and these emotions shape perception, decision-making, and the ways we interact with both our environment and with others. Despite extensive advances in affective neuroscience, relatively little is known about how affect manifests in observable motor behavior. The overall aim of this thesis was to examine how affect modulates spontaneous movement, particularly in the context of Human interaction and Human-Robot Interaction (HRI). Study 1 introduces a methodological contribution by applying motion data analysis to define kinematic parameters that identify mobility and stability challenges in early-stage Parkinson's disease, offering advantages over traditional chronometry-based assessments. In Study 2, we developed a spectral analysis technique to characterize spontaneous human oscillations (i.e., sway). This method facilitated the assessment of movement emergence and inhibition, reflecting affective changes and engagement during HRI. An experimental study (Study 2) compared human sway in interactions with a small humanoid, a tall humanoid, and a small non-humanoid robot. The results indicated that the small non-humanoid robot elicited more spontaneous movement, suggesting that robot morphology influences human motor behavior. In Study 3, we explored the role of emotional context in HRI. Findings revealed that positive contexts increased the power of spontaneous oscillations, whereas negative contexts suppressed movement. In Study 4, we investigated whether interpersonal motor synchronization is related to affective compatibility between two individuals. Results demonstrated that dyads with congruent affective states (i.e., both experiencing either positive or negative states) maintained synchronization longer than incongruent pairs. Taken together, these findings provide empirical evidence that emotions influence motor control. Across both human interaction and HRI, affective changes modulated not only the intensity of spontaneous movement but also the time spent on interpersonal synchronization. Based on this work, we propose a theoretical model of affective motor behavior that describes the influence of affect on motor processes. More broadly, this thesis proposes a theoretical framework in which affective states and movement patterns continuously shape each other through dynamic feedback loops across diverse interactive contexts. Content:
Humans experience emotions continuously, and these emotions shape perception, decision-making, and the ways we interact with both our environment and with others. Despite extensive advances in affective neuroscience, relatively little is known about how affect manifests in observable motor behavior. The overall aim of this thesis was to examine how affect modulates spontaneous movement, particularly in the context of Human interaction and Human-Robot Interaction (HRI). Study 1 introduces a methodological contribution by applying motion data analysis to define kinematic parameters that identify mobility and stability challenges in early-stage Parkinson's disease, offering advantages over traditional chronometry-based assessments. In Study 2, we developed a spectral analysis technique to characterize spontaneous human oscillations (i.e., sway). This method facilitated the assessment of movement emergence and inhibition, reflecting affective changes and engagement during HRI. An experimental study (Study 2) compared human sway in interactions with a small humanoid, a tall humanoid, and a small non-humanoid robot. The results indicated that the small non-humanoid robot elicited more spontaneous movement, suggesting that robot morphology influences human motor behavior. In Study 3, we explored the role of emotional context in HRI. Findings revealed that positive contexts increased the power of spontaneous oscillations, whereas negative contexts suppressed movement. In Study 4, we investigated whether interpersonal motor synchronization is related to affective compatibility between two individuals. Results demonstrated that dyads with congruent affective states (i.e., both experiencing either positive or negative states) maintained synchronization longer than incongruent pairs. Taken together, these findings provide empirical evidence that emotions influence motor control. Across both human interaction and HRI, affective changes modulated not only the intensity of spontaneous movement but also the time spent on interpersonal synchronization. Based on this work, we propose a theoretical model of affective motor behavior that describes the influence of affect on motor processes. More broadly, this thesis proposes a theoretical framework in which affective states and movement patterns continuously shape each other through dynamic feedback loops across diverse interactive contexts. Les êtres humains éprouvent des émotions en continu, et ces émotions façonnent la perception, la prise de décision ainsi que les manières d'interagir avec l'environnement et avec autrui. Malgré les avancées considérables en neurosciences affectives, on sait relativement peu de choses sur la façon dont l'affect se manifeste dans le comportement moteur observable. L'objectif général de cette thèse était d'examiner comment l'affect module le mouvement spontané, en particulier dans le contexte de l'interaction humaine et de l'interaction Humain-Robot (IHR). L'Étude 1 propose une contribution méthodologique. L'analyse des données de mouvement y est utilisée pour définir des paramètres cinématiques permettant d'identifier des difficultés de mobilité et de stabilité dans le débout de maladie de Parkinson. Cette approche présente des avantages par rapport aux évaluations chronométriques classiques. L'Étude 2 développe une méthode d'analyse spectrale destinée à caractériser les oscillations humaines spontanées (balancement postural). Cette méthode permet d'évaluer l'émergence et l'inhibition du mouvement en fonction des variations affectives et de l'engagement en contexte d'IHR. L'expérimentation compare les oscillations spontanées lors d'interactions avec un petit humanoïde, un grand humanoïde et un petit robot non humanoïde. Les résultats indiquent que le petit robot non humanoïde suscite davantage de mouvement spontané. La morphologie du robot apparaît ainsi comme un facteur influençant le comportement moteur humain. L'Étude 3 examine le rôle du contexte émotionnel dans l'IHR. Les résultats montrent que les contextes positifs augmentent la puissance des oscillations spontanées, tandis que les contextes négatifs réduisent le mouvement. L'Étude 4 analyse la synchronisation motrice interpersonnelle. Les résultats révèlent que des dyades partageant un état affectif congruent (i.e., tous deux dans un état positif ou négatif) maintiennent leur synchronisation plus longtemps que des dyades incongruentes. Ces travaux démontrent empiriquement que les émotions influencent le contrôle moteur. Dans l'interaction humaine comme dans l'IHR, l'affect module à la fois l'intensité du mouvement spontané et la durée de la synchronisation interpersonnelle. Un modèle théorique du comportement moteur affectif est proposé, décrivant l'impact de l'affect sur les processus moteurs. Plus largement, cette thèse avance un cadre où états affectifs et dynamiques motrices se modifient mutuellement au sein de boucles de rétroaction dynamiques, dans divers contextes interactifs. Contact https://theses.hal.science/tel-05423779 Soumis le : jeudi 18 décembre 2025-13:49:05 Dernière modification le : vendredi 19 décembre 2025-03:12:07 Contact Ressources Informations Questions juridiques Portails CCSD
Images (1): 
|
|||||
| Human-robot interaction design retreat | https://robohub.org/human-robot-interac… | 0 | Jan 03, 2026 00:01 | active | |
Human-robot interaction design retreatURL: https://robohub.org/human-robot-interaction-design-retreat/ Content: |
|||||
| TUM - Tutor for Human-Robot Interaction seminar | https://portal.mytum.de/schwarzesbrett/… | 1 | Jan 03, 2026 00:00 | active | |
TUM - Tutor for Human-Robot Interaction seminarURL: https://portal.mytum.de/schwarzesbrett/hiwi_stellen/NewsArticle_20250716_111111 Description: We are seeking a tutor (m/f/x) for our interdisciplinary seminar “Human-Robot Interaction” for the Winter Term 2025/26. Content:
Aktuelles Biodiversität langfristig beobachten Frohe Festtage und ein glückliches Neues Jahr „Steht für eure Überzeugungen ein!“ „Alle Forschenden stehen vor philosophischen Fragen“ Forschen mit der Zivilgesellschaft Wichtiger Brennstofftest für FRM II erfolgreich no events today.
Images (1): 
|
|||||
| Four Russian combat robots arrive in Donbass, says ex-space chief … | https://tass.com/defense/1570429 | 1 | Jan 02, 2026 16:00 | active | |
Four Russian combat robots arrive in Donbass, says ex-space chief - Military & Defense - TASSURL: https://tass.com/defense/1570429 Description: The head of the group of military advisers announced on January 15 that Marker combat robots would be tested in the zone of the special military operation in Ukraine Content:
MOSCOW, February 2. /TASS/. Four Marker robotic platforms have arrived in Donbass and specialists have started testing algorithms of conducting warfare within a group of combat robots, Dmitry Rogozin, Russian ex-space boss and head of a group of military advisers and the Tsar Wolves research and technical center, said on his Telegram channel on Thursday. "The first four Marker robots have arrived in the region strictly on schedule. We begin downloading target images and testing algorithms of warfare within a unit of combat robots and installing powerful anti-tank armament," Rogozin said. The head of the group of military advisers announced on January 15 that Marker combat robots would be tested in the zone of the special military operation in Ukraine. The Marker robotic platform was engineered under a joint project of the National Center for the Development of Technologies and Basic Robotic Elements within the Advanced Research Fund and the Android Technics Research and Production Association. The robotic platform is designed to create future warfare models.
Images (1): 
|
|||||
| OpenMind Wants To Be The Android Operating System Of Humanoid … | https://www.ponoko.com/blog/ponoko/open… | 1 | Jan 02, 2026 16:00 | active | |
OpenMind Wants To Be The Android Operating System Of Humanoid RobotsDescription: OpenMind’s ambition to become the “Android” of humanoid robots signals a notable shift in robotics, one where software and human-like interaction take center stage. Their focus on open, hardware-agnostic systems that allow machines to learn and collaborate quickly, is crucial for real-world adaptability. While the idea of robots sharing knowledge instantly is exciting, it’s also a reminder that the technology must remain practical and reliable. OpenMind’s approach of rapid iteration shows promise, and it’s worth watching how these systems evolve as they enter homes and daily life. Content:
Thanks, you're subscribed :) OpenMind’s ambition to become the “Android” of humanoid robots signals a notable shift in robotics, one where software and human-like interaction take center stage. Their focus on open, hardware-agnostic systems that allow machines to learn and collaborate quickly, is crucial for real-world adaptability. While the idea of robots sharing knowledge instantly is exciting, it’s also a reminder that the technology must remain practical and reliable. OpenMind’s approach of rapid iteration shows promise, and it’s worth watching how these systems evolve as they enter homes and daily life. Read the full article here The Oak Ridge National Laboratory’s breakthrough in 3D-printed polymer composite forms for nuclear concrete structures is a game-changer for infrastructure. As an engineer, I value how this innovation cuts weeks to days in production, while maintaining precision and strength, no small feat when dealing with nuclear-grade materials. It’s refreshing to see additive manufacturing applied to such a critical and traditionally slow sector, proving that practical, scalable solutions can come from bold collaboration. This approach promises to reduce costs and risks, accelerating nuclear projects that America urgently needs for its energy future. Read the full article here Rebuilding wildfire-ravaged California homes with AI-powered microfactories shows how technology can meet urgent, real-world needs. ABB and Cosmic Buildings’ robotic microfactories, using digital twins and AI, accelerate construction while ensuring precision and quality, a crucial balance when lives and communities depend on speed and safety. This use of AI and robotics undoubtedly cuts costs and timelines without sacrificing code compliance or resilience, something which is desperately needed. This project is a clear example of smart engineering tackling complex challenges with practical solutions. Read the full article here Samsung Electronics has launched InnoX Lab to push the boundaries of AI, robotics, and digital twins, and it’s hard not to appreciate the focus on practical innovation rather than hype. While many chase flashy tech, Samsung is assembling experts to solve real, complex problems across manufacturing and logistics, which is exactly the kind of measured progress our industry needs. I respect their approach because it balances bold ambition with clear, strategic execution, something often missing in today’s fast-moving AI race. Keep an eye on this lab, as it might just shape the future of hardware engineering in ways that matter. Read the full article here Siemens is raising the bar in industrial robotics with the new Sinumerik Machine Tool Robot, which blends the precision of machine tools with the flexibility of robots. This leap in accuracy and productivity isn’t just incremental, it’s a game changer for sectors like aerospace and automotive that demand tough machining and high precision. What I find notable is Siemens’ use of digital twins and their Sinumerik One CNC to simulate workflows before production, showing a practical, efficient mindset rather than just flashy tech. It’s an innovation worth watching for engineers serious about precision and productivity. Read the full article here Lithium batteries power much of today’s tech, but their supply chain is fragile and geopolitically risky, which often gets overlooked. Researchers at NJIT used AI to discover five promising multivalent-ion battery materials that could bypass lithium’s limits by using more abundant elements like magnesium and zinc. While this breakthrough shows real promise, I believe the bigger challenge isn’t just swapping lithium but rethinking battery design to prioritize fast charging and realistic range over sheer capacity. That practical mindset may ultimately shape the future of electrification more than chasing the highest energy density. Read the full article here Recycling electronics has long been a stubborn challenge, but researchers from Maryland, Georgia Tech, and Notre Dame are changing that with DissolvPCB, a 3D printing method using water-soluble PVA and liquid metal traces. This approach lets you dissolve and reclaim circuit components quickly, bypassing the complex industrial recycling of traditional FR-4 boards. Beyond sustainability, it’s practical for prototyping spaces with limited resources. While it won’t replace high-volume manufacturing overnight, DissolvPCB highlights how additive manufacturing and clever material choices can reshape electronics design. Read the full article here Japan just announced its first fully homegrown superconducting quantum computer, and it’s a clear sign of real engineering independence. What impresses me isn’t just the hardware, crafted entirely domestically, but also the open-source software that makes the system accessible. While quantum tech still faces many challenges, Japan’s integrated approach shows how national focus can reduce reliance on foreign supply chains and boost innovation. It’s a strong reminder that cutting-edge progress doesn’t need sprawling governments or imports, but disciplined expertise and collaboration. If you follow hardware engineering, this is definitely a milestone worth watching closely. Read the full article here Australia’s RMIT team just cracked a major hurdle in 3D-printed titanium alloys by cutting costs nearly a third while boosting strength and ductility. They’ve replaced pricey vanadium with cheaper elements and solved the troublesome uneven grain structure common in legacy alloys like Ti-6Al-4V. What stands out is their clear, practical framework for designing alloys optimized for additive manufacturing, a step that could finally push 3D printing into broader aerospace and medical use. This isn’t just incremental improvement; it’s a genuine leap forward. It reminds us that smart material innovation still drives real progress in hardware engineering. Read the full article here China’s latest organic solar cell breakthrough tackles a stubborn bottleneck in interfacial layers by combining organic and inorganic materials for a “dual-component synergy.” This approach improves conductivity, reduces defects, and curbs charge recombination, pushing certified efficiency to 20.8%, a new record. What’s compelling here is the focus on flexible, lightweight, and eco-friendly power sources for wearable tech, aerospace, and harsh environments. It’s a clear example of how smart materials engineering can drive practical advances in sustainable energy, which is crucial as we seek scalable solutions beyond traditional silicon-based solar cells. Read the full article here Not all e-readers are created equal, and the ZEReader proves that less can be more. Born from an engineering thesis, this open-source, microcontroller-based device strips away the bloat of Android or Linux systems, and Amazon’s ecosystem,, focusing solely on reading. Built on the lightweight Zephyr RTOS, it supports basic EPUB functions with room to grow. As someone who appreciates efficiency and user control, I see real promise here: a device tailored for purpose, free from corporate strings, and designed to last. It’s a reminder that sometimes, engineering elegance beats flashy features every time. Read the full article here In the second episode of the Ponoko Podcast, we dive into the world of engineering, prototyping, and rapid product development, featuring conversations with some of…
Images (1): 
|
|||||
| In Video: Russian Marker Combat Robots Arrive In Donbass | https://southfront.org/in-video-russian… | 0 | Jan 02, 2026 16:00 | active | |
In Video: Russian Marker Combat Robots Arrive In DonbassURL: https://southfront.org/in-video-russian-marker-combat-robots-arrive-in-donbass/ Description: Four Marker combat robots have arrived in the Donbass region, Dmitry Rogozin, former director General of Roscosmos and the head... Content: |
|||||
| Client Challenge | https://www.ft.com/content/4635f501-f91… | 1 | Jan 02, 2026 16:00 | active | |
Client ChallengeURL: https://www.ft.com/content/4635f501-f915-4ea4-8235-0017a0137a94 Content:
Please enable JavaScript to proceed.
Images (1): 
|
|||||
| Скачать Unfair War: Zombie Robots 1.0 для Android | https://trashbox.ru/link/unfair-war-zom… | 10 | Jan 02, 2026 16:00 | active | |
Скачать Unfair War: Zombie Robots 1.0 для AndroidURL: https://trashbox.ru/link/unfair-war-zombie-robots-android Description: Unfair War: Zombie Robots — это напряженный шутер на выживание, действие которого разворачивается в постапокалиптическом мире, захваченном злобными машинами. Content:
Unfair War: Zombie Robots — это напряженный шутер на выживание, действие которого разворачивается в постапокалиптическом мире, захваченном злобными машинами. Unfair War: Zombie Robots погружает вас в отчаянную борьбу за выживание против безжалостных роботов-врагов. Режим «Арена» проверит вашу выносливость бесконечными волнами механических противников, от шаров-огнеметов до снайперских роботов и колоссальных боссов. Между тем, режим «Комната» бросает вам вызов очистить комнаты, кишащие врагами, в ходе систематических боевых операций. Ваше выживание зависит от стратегического позиционирования, разумного расходования боеприпасов и эффективного использования укрытий во время интенсивных перестрелок. Создайте свой арсенал из разнообразного оружия, включая АК-47, миниганы и апокалиптическую косу, объединившись со специализированными компаньонами. Выбирайте своих партнеров с умом — будь то гранатометчик, снайпер или ниндзя, каждый из них обладает уникальными способностями, которые могут переломить ход сражения. Откройте скрытые комнаты, содержащие улучшения оружия, и соберите золото, чтобы разблокировать мощные усовершенствования и скины персонажей, которые повысят вашу боевую эффективность. Ключевые особенности:
Images (10): 



|
|||||
| Des robots militaires russes pourront distinguer les cibles cachées - … | https://fr.sputniknews.africa/20230820/… | 7 | Jan 02, 2026 16:00 | active | |
Des robots militaires russes pourront distinguer les cibles cachées - 20.08.2023, Sputnik AfriqueDescription: Il sera bientôt impossible de se cacher des robots russes. En effet, une technologie permettant aux robots de distinguer les soldats et équipements militaires... 20.08.2023, Sputnik Afrique Content: Images (7): 


|
|||||
| Critical Hits - Videogames, Anime, Cinema e TV e Reviews | https://criticalhits.com.br/dicas/war-r… | 1 | Jan 02, 2026 16:00 | active | |
Critical Hits - Videogames, Anime, Cinema e TV e ReviewsURL: https://criticalhits.com.br/dicas/war-robots-codigos-para-itens-gratis-julho-2025/ Description: O Critical Hits é um site com notícias diárias sobre Games, Anime, Cinema e TV além de reviews, vídeos, artigos e listas Content:
O Critical Hits é um site com notícias diárias sobre o mundo dos games, anime, cinema e tv, além de artigos, opinião e análises. © Critical Hits - Marca Registrada
Images (1): 
|
|||||
| Robots can save humans time by doing menial tasks in … | https://tass.com/science/1740881 | 1 | Jan 02, 2026 16:00 | active | |
Robots can save humans time by doing menial tasks in open space - Science & Space - TASSURL: https://tass.com/science/1740881 Description: According to Yevgeny Dudorov, in the future, robots will be able to complete the tasks that humans never perform outside space stations Content:
MOSCOW, February 2. /TASS/. Robots can be used to greatly reduce the amount of time needed to perform extravehicular space activities, Yevgeny Dudorov, executive director of the Android Technics research and production association, said in an interview with TASS. "We can use a robot to prepare the station; once that is done, a cosmonaut comes to perform a specific mission and after that, a robot, controlled by a human at the station or on Earth, cleans up the workplace. Besides, when there is an urgent need to perform a mission but a cosmonaut is unable to go outside for a spacewalk, it’s logical to use robots. By using robots, we can significantly reduce the time an operation requires," Dudorov said. According to him, in the future, robots will be able to complete the tasks that humans never perform outside space stations. "This could be satellite repairs. Today, there are a number of satellites that need components replaced and other minor repairs. These satellites aren’t functional in their present condition. Meanwhile, a robot can be used to intercept the faulty device and replace some of its parts so it can continue to operate, instead of launching a new satellite and leaving the old one floating in space," the Android Technics executive explained. In order to do so, there is a need to develop fine motor skills in advanced robots, he added.
Images (1): 
|
|||||
| Meta ha empezado a mostrar su juego en la robótica. … | https://www.xataka.com/robotica-e-ia/me… | 1 | Jan 02, 2026 16:00 | active | |
Meta ha empezado a mostrar su juego en la robótica. Lo que busca es claro: ser el Android de los robots gracias al softwareDescription: Hay muchas razones para pensar que los robots humanoides tendrán un papel clave en el futuro. Podrían encargarse de las tareas del hogar, atender en un hotel... Content:
Javier Marquez Javier Marquez Hay muchas razones para pensar que los robots humanoides tendrán un papel clave en el futuro. Podrían encargarse de las tareas del hogar, atender en un hotel o asumir trabajos de riesgo. Sin embargo, no todo el mundo lo ve posible: el cofundador de iRobot insiste en que todo esto es una fantasía. Pero si ese futuro termina llegando, la duda es inevitable: ¿qué empresas y países marcarán la pauta? Si tuviésemos que dar nombres, Tesla (Estados Unidos) y Unitree (China) estarían entre los candidatos, pero hay muchas otras empresas en carrera. Meta, conocida por su imperio en redes sociales, quiere abrirse paso en este terreno con una estrategia distinta. Su apuesta no pasa solo por el hardware, sino por algo que podría marcar la diferencia: el software. Los rumores sobre los planes de Meta en robótica humanoide comenzaron a principios de este año, y la compañía terminó por confirmarlos. Hace poco conocimos más detalles gracias a Andrew Bosworth, su CTO, que dejó entrever en una entrevista con The Verge que la jugada se parece bastante a lo que Google hizo con Android. Aunque Bosworth evita la comparación directa, lo que plantea Meta sigue ese guion. Continuarán desarrollando sus propios robots humanoides, pero el movimiento diferencial está en poner su software al alcance de otros fabricantes mediante licencias. La condición: cumplir con unas especificaciones concretas, igual que ocurre en Android. El ejecutivo deja claro por qué esto puede funcionar. A su juicio, el verdadero obstáculo de la robótica humanoide no está en el hardware, sino en el software. Especialmente en lo que llama “manipulación hábil”. Los robots ya son capaces de moverse con rapidez e incluso de dar volteretas, pero siguen fallando en algo tan básico como sujetar un vaso de agua sin derramarlo. Una de las piezas centrales de la estrategia de Meta está en la simulación. Su laboratorio de superinteligencia trabaja en lo que llaman un “world model”, un modelo del mundo capaz de recrear en un entorno digital cómo debería moverse y reaccionar una mano humana. El objetivo es entrenar a los robots en escenarios virtuales hasta que adquieran destreza suficiente para manipular objetos con precisión. La compañía, además, ha logrado reunir a un equipo singular, con figuras como Marc Whitten, que antes fue directivo en Cruise, o Sangbae Kim, considerado uno de los grandes referentes en robótica avanzada. A ellos se añaden perfiles internos con larga trayectoria. Una mezcla de especialistas externos y veteranos de la casa que refleja la ambición de la apuesta. El aterrizaje de los humanoides no será inmediato ni universal. Un análisis de Bank of América detalla un despliegue de tres fases. Lo más probable es que primero los veamos en entornos controlados antes de que aterricen en nuestros hogares de manera masiva. Si el plan de Meta prospera, la compañía venderá sus propios robots, también licenciará su plataforma. De esta forma, podríamos ver la tecnología de Meta detrás de robots de un amplio abanico de fabricantes. A partir de ahí, se abren escenarios plausibles aunque todavía no confirmados. Uno de ellos es que Meta complemente las licencias con servicios en la nube para entrenamiento o mantenimiento, o incluso que surja un ecosistema de “habilidades” descargables como aplicaciones. Es una hipótesis razonable: cuantos más robots utilicen el sistema, más datos obtendría la empresa para mejorar el producto, creando un círculo virtuoso difícil de replicar por sus competidores. Habrá que ver si finalmente avanza en esa dirección. La estrategia de Google con Android ha funcionado. Imágenes | Apple (serie ‘Sunny’ de Apple TV+) | Dima Solomin | Mika Baumeister En Xataka | Alibaba está ganando la carrera de los modelos de IA Open Source. Su estrategia es simple: ser cansina Los mejores comentarios: Ver 6 comentarios En Xataka hablamos de... Ver más temas Webedia Tecnología Videojuegos Entretenimiento Gastronomía Motor Estilo de vida Economía Ediciones Internacionales Partners Destacamos Ver más temas Suscribir Más sitios que te gustarán Reciente Ver más artículos Xataka TV Ver más vídeos
Images (1): 
|
|||||
| « Découvrez le futur d'Android XR » : battle de … | https://www.phonandroid.com/decouvrez-l… | 1 | Jan 02, 2026 16:00 | active | |
« Découvrez le futur d'Android XR » : battle de robots, lunettes et casque connectés... Google tease sa conférence The Android Show du 8 décembreDescription: Google vient d’annoncer une édition de The Android Show dédiée à Android XR. Découvrez les indices semés par le teaser de l'événement. Content:
Google vient d’annoncer une nouvelle édition de The Android Show. Cette fois-ci, cette conférence en ligne sera consacrée à Android XR. Battle de danse de robots, casque et lunettes connectées, Gemini… La bande-annonce (et sa description surtout) sème d’intrigants indices sur ce que nous réserve cet événement. Android XR est devenu réalité avec la présentation officielle en octobre du Galaxy XR, le casque de réalité mixte de Samsung – qui arrivera également en France l’an prochain. Mais il ne s’agit là que du début de l’expérience Android XR. Pour dévoiler ses nouveautés, Google fait les choses en grand : le géant de la tech vient d’annoncer une nouvelle édition de sa conférence en ligne spéciale The Android Show. Le sous-titre est plus qu’explicite : après l’« I/O Edition » du 13 mai dernier, faites désormais place à l’« XR Edition ». Pour annoncer l’événement, Google n’a pas lésiné sur les moyens : la firme de Mountain View propose un teaser vidéo de 40 secondes – visible ci-dessous – sur lequel figurent des Android Bots qui arborent fièrement des casques et des lunettes. Cet événement sera dédié à Android XR, la bande-annonce est sans équivoque : « Découvrez le futur d’Android XR ». C’est la description qui est la plus bavarde. Elle annonce : « Apprenez tout ce qu’il y a à savoir sur la XR, que ce soit à travers les lunettes, les casques et tout ce qui se situe entre les deux. Découvrez comment, avec Gemini à vos côtés, vous pouvez profiter d’une expérience plus conversationnelle, contextuelle et utile. » La mention des « lunettes » n’est pas anodine et les spéculations vont bon train : l’animation mettant en scène un battle de danse de robots, cet événement sera-t-il l’occasion pour Google de présenter ses propres lunettes connectées ? Ou s’agira-t-il de lunettes en collaboration et pourquoi pas celles de Samsung, pressentie pour 2026 ? Seul le visionnage du The Android Show: XR Edition nous le dira. Et si la star du show n’était finalement pas du matériel, mais bel et bien l’intelligence artificielle maison de Google : Gemini – également citée dans la description ? L’IA multimodale de la firme de Mountain View s’immisce – pour ne pas dire s’impose – partout et présente des progrès impressionnants. Quoi qu’il en soit, pour être sûr que vous ne passiez pas à côté de cette conférence en ligne, Google a inclus dans la description un lien qui vous renvoie vers une page web dédiée à l’événement : en plus d’afficher un compte à rebours, elle vous permet de planifier un rappel par e-mail ou d’ajouter l’événement à votre calendrier. Vous pouvez également activer les notifications YouTube en cliquant sur « M’avertir ». Alors, rendez-vous le 8 décembre 2025 à 19 heures (heure française) pour découvrir The Android Show: XR Edition. Les informations recueillies sont destinées à CCM Benchmark Group pour vous assurer l'envoi de votre newsletter. Elles seront également utilisées sous réserve des options souscrites, par CCM Benchmark Group à des fins de ciblage publicitaire et prospection commerciale au sein du Groupe Le Figaro, ainsi qu’avec nos partenaires commerciaux. Le traitement de votre email à des fins de publicité et de contenus personnalisés est réalisé lors de votre inscription sur ce formulaire. Toutefois, vous pouvez vous y opposer à tout moment Plus généralement, vous bénéficiez d'un droit d'accès et de rectification de vos données personnelles, ainsi que celui d'en demander l'effacement dans les limites prévues par la loi. Vous pouvez également à tout moment revoir vos options en matière de prospection commerciale et ciblage. En savoir plus sur notre politique de confidentialité et notre politique Cookies. Fender ne se contente plus de ses guitares et amplis. Lors du CES 2026, la marque a surpris avec une paire d’enceintes Bluetooth au concept inédit. Celles-ci embarquent une fonction unique qui change la façon dont plusieurs appareils peuvent diffuser… Samsung ne semble pas vouloir ralentir sur le marché des smartphones pliables. Une nouvelle fuite évoque des changements majeurs pour les Galaxy Z Fold 8 et Z Flip 8. Si elle se confirme, ces prochains modèles pourraient bien prendre tout… Un rapport coréen vient de dévoiler le prix du Galaxy S26, le prochain flagship de Samsung. Si tout se passe comme prévu, le constructeur coréen devrait parvenir à défier les contraintes actuelles du marché. La nouvelle année est là et,… Il se pourrait bien que l’on ne soit plus qu’à quelques mois d’un jailbreak officiel de la PS5. Après le leak d’un élément capital à la sécurité de la console, les hackers ont désormais toutes les clés en main pour… Les Galaxy Watch 8 et Watch 8 Classic profitent d’une grosse réduction en ce début d’année. Grâce à plusieurs offres cumulables, Samsung propose jusqu’à 150 € de remise sur ses montres connectées haut de gamme. On vous dit comment profiter… Stranger Things est enfin arrivé à son terme après presque 10 ans sur nos écrans. Si le dernier épisode ne laisse que peu de place aux doutes, certains espèrent encore voir Hawkins et ses habitants revenir sur Netflix. Ce ne… Microsoft recommence avec ses messages peu subtils pour nous pousser à utiliser ses services. C’est au tour de OneDrive de s’inviter dans le menu Démarrer à travers un message légèrement alarmant. Décidément, Microsoft a de la suite dans les idées…. Une fuite liée à One UI 8.5 confirme enfin la présence d’un mode d’affichage spécial sur le Galaxy S26 Ultra. Cette fonction rend l’écran difficile à lire lorsqu’il est vu de côté, et empêche les regards indiscrets dans les lieux… Plusieurs analystes estiment qu’Apple pourrait faire une entorse à ses habitudes en sortant l’iPhone 18 plus tard qu’attendu. Une décision qui, si elle se confirme, serait motivée par plusieurs facteurs. Depuis qu’Apple a dévoilé le premier iPhone en 2007, nous… La sortie de la série Marvel Wonder Man sur Disney+ approche. En attendant, un nouveau trailer toujours aussi décalé nous montre quels sont les pouvoirs du super-héros, du moins en partie. Plus de 3 ans que les fans attendent ça…. Les informations recueillies sont destinées à CCM Benchmark Group pour vous assurer l'envoi de votre newsletter. Elles seront également utilisées sous réserve des options souscrites, par CCM Benchmark Group à des fins de ciblage publicitaire et prospection commerciale au sein du Groupe Le Figaro, ainsi qu’avec nos partenaires commerciaux. Le traitement de votre email à des fins de publicité et de contenus personnalisés est réalisé lors de votre inscription sur ce formulaire. Toutefois, vous pouvez vous y opposer à tout moment Plus généralement, vous bénéficiez d'un droit d'accès et de rectification de vos données personnelles, ainsi que celui d'en demander l'effacement dans les limites prévues par la loi. Vous pouvez également à tout moment revoir vos options en matière de prospection commerciale et ciblage. En savoir plus sur notre politique de confidentialité et notre politique Cookies.
Images (1): 
|
|||||
| Lunar base to require hundreds of robots — executives - … | https://tass.com/science/1740977 | 1 | Jan 02, 2026 16:00 | active | |
Lunar base to require hundreds of robots — executives - Science & Space - TASSURL: https://tass.com/science/1740977 Description: Robots will also be needed to transport cargo, including Moon soil Content:
MOSCOW, February 2. /TASS/. Several hundred robots will be required to create and maintain a manned base on the Moon, Executive Director of Android Technics Company Evgeny Dudorov told TASS in an interview. "How many robots could fly to the Moon? Definitely not just one. Hundreds of robots will be required if humans plan to have a base on the Moon. A robot with a mobile anthropomorphic structure will be one of possible design variants," Dudorov said. Robots will also be needed to transport cargo, including Moon soil, as well as manipulation systems to move items and unload arriving spaceships, he added.
Images (1): 
|
|||||
| War Robots - Trailer d'aperçu officiel Kaji Robot | https://fr.ign.com/war-robots/81202/tra… | 10 | Jan 02, 2026 16:00 | active | |
War Robots - Trailer d'aperçu officiel Kaji RobotURL: https://fr.ign.com/war-robots/81202/trailer/war-robots-trailer-dapercu-officiel-kaji-robot Description: Jetez un coup d'œil à la bande-annonce de présentation du robot Kaji pour War Robots, un jeu d'action et de combat en ligne basé sur des méchas et développé par MY.GAMES. Les joueurs peuvent découvrir Kaji, un mécha qui peut devenir invisible, se déplacer à grande vitesse et déployer des mines pour vaincre l'adversaire. Kaji est disponible dès maintenant dans War Robots pour iOS, Android et PC (Steam). Content: Images (10): 


|
|||||
| В War Robots добавили кросс-прогресс между PC и смартфонами | https://app-time.ru/post/v-war-robots-d… | 1 | Jan 02, 2026 16:00 | active | |
В War Robots добавили кросс-прогресс между PC и смартфонамиURL: https://app-time.ru/post/v-war-robots-dobavili-kross-progress-mezhdu-pc-i-smartfonami Description: Игроки War Robots могут продолжать битвы независимо от того, где они находятся: дома или в дороге. Издатель MY.GAMES сообщил, что в War Robots появилась поддерж Content:
Издатель MY.GAMES сообщил, что в War Robots появилась поддержка кросс-платформы. Теперь игроки могут легко переключаться между PC, iOS и Android, сохраняя весь свой прогресс. Чтобы перенести прогресс, игроки должны привязать свой профиль к специальному идентификатору — MY.GAMES ID. Это можно сделать в меню игры. После привязки можно войти в свой аккаунт на другой платформе. Кроме этого, недавно разработчики открыли ещё одну возможность скачать War Robots на Android, если в вашем регионе игра недоступна — скачать APK-файл с официального сайта. Это здравое решение, которого должны придерживаться если не издатели, то разработчики многих других популярных мобильных игр, недоступны в РФ после 2022 года. War Robots скачали более 300 млн раз: 98% пришлось на Android и iOS, а 2% — на PC. Среди смартфонов 228 млн загрузок пришлось на Android и 73 млн загрузок на iOS. В свежем обновлении разработчики улучшили интерфейс и добавили несколько секунд неуязвимости для воскресших роботов.
Images (1): 
|
|||||