AUTOMATION HISTORY
1372
Total Articles Scraped
3606
Total Images Extracted
Scraped Articles
New Automation| Action | Title | URL | Images | Scraped At | Status |
|---|---|---|---|---|---|
| Icetana Extends SoftBank Robotics Distribution Partnership into Americas | https://smallcaps.com.au/article/icetan… | 10 | Jun 15, 2026 08:00 | active | |
Icetana Extends SoftBank Robotics Distribution Partnership into AmericasDescription: Icetana extends SoftBank Robotics distribution into the Americas, unlocking US market access as the fifth regional deal under the SoftBank partnership. Content:
Icetana extends SoftBank Robotics distribution into the Americas, unlocking US market access as the fifth regional deal under the SoftBank partnership. icetana AI (ASX: ICE) said it has signed a distribution agreement with SoftBank Robotics America, extending its broader SoftBank Robotics Group partnership into the Americas. icetana develops AI surveillance software used to monitor large camera networks. In earlier company materials, management said the platform can allow one operator to manage 1,000-plus cameras in real time. The company's technology is currently deployed across 70 sites, 17,000 cameras and 15 countries. The new agreement broadens access to the US market through SoftBank Robotics’ sales network, which fits with management’s stated partner-led growth model. The Americas agreement is the fifth regional distribution agreement under icetana’s broader partnership with SoftBank Robotics Group that was executed in June 2025. The regional expansion has occurred in stages rather than through a single global sales agreement, with earlier deals already covering Japan, Australia and New Zealand, broader Asia-Pacific, and the UAE and Saudi Arabia. The addition of the Americas extends that footprint again, with management pointing specifically to US market access. SoftBank Robotics Group operates across 21 locations in 9 countries. The original June 2025 SoftBank deal included separate subscription, global partnership, and Japan distribution arrangements, along with a product development program, underlining that the relationship has included both channel and technology elements. Recent filings also suggest the SoftBank relationship has already produced some commercial traction outside today’s announcement. In April 2026, icetana disclosed a US$176,450 one-year SaaS order from SoftBank Robotics Group for deployment with Japan Reliance Service Corporation. The company said that order was expected to add about A$250,000 to ARR, subject to deployment before 31 August 2026 and later renewal. The core disclosed number in today’s filing is the count of regional agreements rather than a contract sum, with five regional distribution agreements now under the broader SoftBank Robotics partnership. The filing also includes operating footprint data rather than financial terms, leaving several commercially important details absent. There is no disclosed marketing budget, exclusivity structure, customer list, milestone schedule, or minimum sales commitment tied to the Americas agreement, nor is there any mention of regulatory approvals or government framework dependencies, suggesting this is a straight commercial distribution update rather than a transaction requiring separate regulatory steps. That absence of economics stands out because icetana’s recent filings have been more specific where revenue was involved. The April 2026 SoftBank-linked Japan order disclosed both contract value and ARR contribution, while the company’s $4.0 million placement on 29 April 2026 set out intended uses including sales conversion into contracted ARR, partner scaling through SoftBank Robotics and Macnica, product development, and general working capital. The next key test is whether the expanded distribution footprint starts converting into named customer wins, deployments or recurring revenue in the Americas. Until the company discloses order values, customer numbers or ARR tied to this channel, the practical commercial weight of the agreement remains difficult to measure. Existing SoftBank-related execution milestones also matter, with the previously announced Japan Reliance Service Corporation deployment due to commence before 31 August 2026. The company has said revenue beyond the initial 12-month term depends on customer renewal, making delivery timing and follow-on retention important markers for whether partner-led selling is translating into repeatable outcomes. icetana’s new SoftBank Robotics America agreement expands the company’s geographic sales reach and adds another layer to a partnership management has identified as central to its go-to-market strategy. But until the company discloses customer wins, order values or ARR tied to the Americas channel, the significance of the update remains more strategic than financial, with execution and funding still key considerations. Funding remains part of the backdrop as well, with icetana reporting ARR of $2.6 million, quarterly revenue of $607,000, and gross margin of 90% in its Q3 FY26 quarterly. But it also disclosed a net operating cash outflow of $1.2 million for the quarter, with cash of $1.0 million at period end before receiving $705,000 in April. The later $4.0 million placement eased immediate pressure, but the broader question remains whether additional channel reach can be converted into contracted ARR quickly enough to support the company’s operating spend. Taken together, that leaves a clear watch list: evidence of Americas customer wins, progress on the existing SoftBank-linked Japan deployment, ARR conversion from partner channels, and whether quarterly cash burn starts to moderate after the recent capital raise. The ASX small-cap stories that matter, filed before 9am AEST. Curated by the Small Caps desk. No quote data No recent filings Get the exclusive news, interviews and analysis, straight to your inbox. Small Caps is Australia's #1 site for market news & information on ASX-listed small cap companies. Independent newsroom + institutional research, since 2014. Small Caps and affiliated companies accept no responsibility for any claim, loss or damage as a result of information provided or its accuracy. The information provided on this site is general in nature, not financial product advice, see a financial expert before making any investment decision. Your personal objectives, financial situation or needs have not been taken into consideration. There may be a conflict of interest present with commercial arrangements with companies and/or stock held. Small Caps or an associate may receive a commission for funds raised.
Images (10): 

'/%3e%3c/defs%3e%3cpath fill='%23012169' d='M0 0h10080v5040H0z'/%3e%3cpath stroke='%23fff' stroke-width='.6' d='m0 0 6 3m0-3L0 3' clip-path='url(%23b)' transform='scale(840)'/%3e%3cpath stroke='%23e4002b' stroke-width='.4' d='m0 0 6 3m0-3L0 3' clip-path='url(%23c)' transform='scale(840)'/%3e%3cpath stroke='%23fff' stroke-width='840' d='M2520 0v2520M0 1260h5040'/%3e%3cpath stroke='%23e4002b' stroke-width='504' d='M2520 0v2520M0 1260h5040'/%3e%3cg fill='%23fff'%3e%3cuse xlink:href='%23d' x='2520' y='3780'/%3e%3cuse xlink:href='%23a' x='7560' y='4200'/%3e%3cuse xlink:href='%23a' x='6300' y='2205'/%3e%3cuse xlink:href='%23a' x='7560' y='840'/%3e%3cuse xlink:href='%23a' x='8680' y='1869'/%3e%3cuse xlink:href='%23e' x='8064' y='2730'/%3e%3c/g%3e%3c/svg%3e)
|
|||||
| Comment entraîne-t-on les robots humanoïdes ? | https://www.journaldunet.com/intelligen… | 5 | Jun 14, 2026 08:00 | active | |
Comment entraîne-t-on les robots humanoïdes ?Description: L'essor des modèles d'IA transforme la manière dont les robots humanoïdes sont entraînés. Collecte de données, simulation et nouveaux modèles d'apprentissage ouvrent la voie à des machines capables de généraliser leurs connaissances à de nouvelles situations. Content:
L'essor des modèles d'IA transforme la manière dont les robots humanoïdes sont entraînés. Collecte de données, simulation et nouveaux modèles d'apprentissage ouvrent la voie à des machines capables de généraliser leurs connaissances à de nouvelles situations. En savoir plus sur notre politique de confidentialité Les robots ont longtemps été programmés pour exécuter chacun de leurs mouvements, codés à l’avance. Cette approche fonctionnait dans des environnements très contrôlés, comme les usines ou les entrepôts logistiques, mais s’avérait trop limitée face à des situations plus imprévisibles. Les progrès récents de l’intelligence artificielle et l’émergence des modèles de fondation ont changé la donne. Plutôt que de suivre uniquement des règles prédéfinies, les robots humanoïdes sont désormais entraînés à partir de données. En observant des actions humaines, ils peuvent reproduire des gestes, identifier des schémas récurrents et tenter ainsi de généraliser leurs connaissances à de nouvelles situations. "Nous sommes passés d’une logique où l’on programmait des comportements à une approche où ces comportements sont appris à partir des données. C’est la seule manière possible de passer à l’échelle", résume Deepak Pathak, cofondateur et CEO de Skild AI, start-up américaine qui développe un modèle présenté comme un "cerveau généraliste pour les robots". Les robots apprennent principalement à partir de trois types de données : les données robotiques (très précises mais difficiles à collecter à grande échelle), la vidéo (abondante mais moins riche en informations sur les interactions physiques, comme les forces ou les contacts entre objets) et les données générées dans des environnements simulés, qui souffrent d’un écart avec le monde réel ("Sim-to-real gap"). Il existe plusieurs méthodes pour récolter ces données. La plus simple est l’apprentissage par observation: le robot observe un humain accomplissant certaines tâches. Grâce à ses caméras et à ses capteurs, il enregistre les mouvements et les gestes, afin de les reproduire par la suite. Les modèles d’IA vont ensuite pouvoir identifier des schémas récurrents. Par exemple, si des centaines de démonstrations montrent comment saisir une tasse à différents endroits, sous différents angles et éclairages, le robot peut généraliser pour apprendre à attraper un objet cylindrique. Mais la méthode la plus répandue est la télé-opération. Un humain équipé d’une télécommande ou d’un casque VR contrôle les gestes du robot, ce qui lui permet de les mémoriser. Le téléopérateur peut être équipé de gants haptiques et de capteurs de mouvements, afin de récolter davantage de données. Cette méthode permet de capturer des informations détaillées telles que l’angle des articulations ou la force appliquée. Les principaux constructeurs d’humanoïdes ont recours à ce type d’entraînement. 1X, qui commence à commercialiser le robot domestique NEO, proposera même un service de téléopération à distance. Un employé pourra prendre le contrôle de l’humanoïde afin de lui apprendre à accomplir certaines tâches ménagères au domicile du client. La collecte de données via la téléopération est devenue une véritable industrie, notamment en Chine où des centres spécialisés emploient des opérateurs chargés d’effectuer des tâches répétitives afin d’alimenter les modèles d’apprentissage destinés aux robots. Ces approches, si elles s’avèrent plus efficaces que la programmation, présentent toutefois des limites importantes. Elles s’avèrent particulièrement chronophages et gourmandes en force de travail humaine. Pour tenter de contourner ces limitations, de nouvelles méthodes ont émergé. Elles agrègent plusieurs types de données, notamment la vidéo, et ont été pensées pour permettre aux modèles IA de comprendre les lois de la physique. Les modèles Video-Langage-Action (VLA) se nourrissent par exemple d’images et d’instructions textuelles, avant de produire en sortie une séquence d'actions motrices exécutables par un robot. Plusieurs acteurs majeurs développent leurs propres modèles VLA, à l’image de GR00T N1 chez NVIDIA, Gemini Robotics chez DeepMind ou Helix chez Figure AI. Skild AI applique pour sa part à la robotique une logique déjà utilisée dans les grands modèles de langage : un pré-entraînement sur d’immenses volumes de données, suivi d’un affinage avec des données plus spécifiques issues du monde réel. "Cette combinaison, avec beaucoup de données générales d’un côté, puis des données spécifiques de qualité de l’autre, est l’un des principes clés de l’IA actuelle", explique Deepak Pathak. La start-up Rhoda AI a décidé de poursuivre un autre chemin avec son modèle "Direct Video-Action" (DVA). Celui-ci permet aux robots d’apprendre directement à partir d’un modèle vidéo ultra-performant, afin d’améliorer leur capacité à agir dans des environnements réels. Un autre modèle populaire dans le monde de la robotique est ce que l’on appelle les World Models. Ils permettent aux robots d’acquérir une compréhension de la manière dont fonctionne le monde physique et d’anticiper les conséquences de leurs actions. Couplés à des environnements simulés, ils permettent aux robots d’effectuer des millions d’essais avant une mise en situation réelle. Si les LLM comme ChatGPT prédisent le prochain mot, les World Models prédisent les conséquences d’une action. Un robot peut par exemple apprendre qu’un verre risque de tomber s’il est poussé trop fort, ou qu’un objet caché derrière un autre existe toujours. Parmi les principaux acteurs du secteur figurent AMI Labs, cofondée par Yann Le Cun, et World Labs, fondée par Fei-Fei Li. Les méthodes d’apprentissage agrégeant divers types de données, couplées à des entraînements en simulation, apparaissent ainsi comme une solution pour aider les robots à comprendre le monde qui les entoure. Les acteurs du secteur de la robotique humanoïde espèrent que cela permettra de lever l’un des principaux freins au déploiement massif de leurs modèles.
Images (5): 




|
|||||
| LLM on ROS 2: A Guide to ROSpider AI Hexpod … | https://www.hackster.io/HiwonderRobot/l… | 10 | Jun 14, 2026 08:00 | active | |
LLM on ROS 2: A Guide to ROSpider AI Hexpod Robot - Hackster.ioURL: https://www.hackster.io/HiwonderRobot/llm-on-ros-2-a-guide-to-rospider-ai-hexpod-robot-5e32f8 Description: How the ROSpider combines 18-DOF bionic movement, 3D Vision, and Large Language Models (LLMs) to transform natural language into actions. Find this and other hardware projects on Hackster.io. Content:
Add the following snippet to your HTML:<iframe frameborder='0' height='385' scrolling='no' src='https://www.hackster.io/HiwonderRobot/llm-on-ros-2-a-guide-to-rospider-ai-hexpod-robot-5e32f8/embed' width='350'></iframe> How the ROSpider combines 18-DOF bionic movement, 3D Vision, and Large Language Models (LLMs) to transform natural language into actions. Read up about this project on How the ROSpider combines 18-DOF bionic movement, 3D Vision, and Large Language Models (LLMs) to transform natural language into actions. For years, hobbyist robotics was limited to "Reactive Automation"—if a sensor detects a wall, turn left. But the industry is moving toward Embodied AI. This means giving an artificial "brain" (like ChatGPT or DeepSeek) a physical "body" that can reason about its surroundings. ROSpider is designed specifically as a sandbox for this evolution. It isn't just a walker; it’s a multimodal agent capable of understanding the nuance behind a human command like, "Go find the red package and bring it to my desk." To run modern AI, you need a serious compute stack. ROSpider supports NVIDIA Jetson or Raspberry Pi 5, acting as the primary "Cerebrum" for high-level ROS 2 processing. An intelligent agent is only as good as its data. ROSpider integrates three core sensing technologies: This is where the magic happens. The workflow bridges the gap between a "chat" and a "physical act": 1. Intent Parsing: The robot captures your voice, converts it to text, and sends it to an LLM (Online via API or Local via Ollama). 2. Task Decomposition: The LLM breaks a vague request into sub-tasks. 3. Vision-Language Alignment: The robot uses YOLO (for recognition) and the 3D camera (for positioning). It "grounds" the LLM's abstract idea of a "messy block" into a real-world coordinate (X, Y, Z). 4. Action Execution: The MoveIt 2 framework calculates the arm's trajectory, ensuring the 6-DOF gripper reaches the target without colliding with the robot’s own legs. One of the biggest hurdles in ROS 2 is the steep learning curve. ROSpider lowers this barrier with an Integrated Algorithm Framework. Out of the box, it supports: Whether you are a university researcher or a senior maker, the platform is designed to be "Open-Source First, " allowing you to swap sensors, modify gait algorithms, or deploy your own custom AI models. ROSpider represents a move away from "pre-set paths" toward "cognitive missions." By combining the structural flexibility of a hexapod with the reasoning power of Multimodal AI, we are entering an era where robots are no longer just tools—they are intelligent partners capable of navigating and interacting with our world. Hackster.io, an Avnet Community © 2026
Images (10): 



|
|||||
| Microsoft prueba ChatGPT en robots | https://www.iprofesional.com/tecnologia… | 10 | Jun 14, 2026 08:00 | active | |
Microsoft prueba ChatGPT en robotsURL: https://www.iprofesional.com/tecnologia/377941-microsoft-prueba-chatgpt-en-robots Description: El objetivo de la investigación es ver si ChatGPT puede pensar más allá del texto y razonar sobre el mundo físico para ayudar con las tareas de robótica Content:
Microsoft anunció que está investigando el modo en que se producen las interacciones entre humanos y robots, utilizando para ello la tecnología de inteligencia artificial ChatGPT en estas máquinas. Desarrollado por OpenAI, ChatGPT tiene capacidad para generar y enlazar ideas, así como para recordar conversaciones. En el último mes, la compañía fue integrando esta tecnología en sus diferentes servicios, comenzando con Azure OpenAI Service a mediados de enero, para llevarla después a su motor de búsqueda Bing y su navegador Edge. Su última iteración se ha materializado en la vista previa del nuevo Bing basado en inteligencia artificial en las aplicaciones para móviles y en su navegador Edge, así como la versión del motor de búsqueda para Skype. Ahora, el fabricante tecnológico adelantó que está probando esta tecnología en robots, para "hacer posibles las interacciones naturales" con humanos y ha explicado qué es lo que espera de esta integración. "Nuestro objetivo con esta investigación es ver si ChatGPT puede pensar más allá del texto y razonar sobre el mundo físico para ayudar con las tareas de robótica", ha comentado Microsoft en un comunicado, donde ha matizado que busca "ayudar a las personas a interactuar con los robots más fácilmente, sin necesidad de aprender lenguajes de programación complejos ni detalles sobre sistemas robóticos". En este sentido, ha establecido como desafío enseñar a este chatbot a resolver problemas teniendo en cuenta factores como el contexto del entorno operativo y el modo en que "las acciones físicas pueden cambiar el estado del mundo". La empresa señala que este producto de OpenAI tiene capacidades para llevar a cabo tareas por sí mimo, pero que ha desarrollado una serie de principios de diseño que se pueden utilizar para guiar los modelos de lenguaje hacia la resolución de tareas de robótica. Por otra parte, ha indicado que ChatGPT puede "desbloquear un nuevo paradigma de la robótica", en la que habitualmente se suceden procesos lentos, costosos e ineficientes de reescritura del código del comportamiento del robot. De esa forma, este chatbot tiene la capacidad de brindar comentarios de alto nivel al denominado modelo de lenguaje extenso o de gran tamaño (LLM, por sus siglas en inglés), a la vez que monitoriza el rendimiento del robot y generar código para diferentes escenarios de robótica. "Lo que está pasando a nuestro alrededor es real e irreal a la vez": cosas del día a día que nos costará distinguir si tienen detrás a una IA Para impulsar el LLM, Microsoft construyó una serie de principios de diseño destinados a escribir indicaciones para tareas de robótica. Para ello definió un conjunto de interfaces de programación de aplicaciones (API) robóticas. Una vez escrito el mensaje de texto para que ChatGPT lo interprete, en el que se describe el objetivo de la tarea que debe realizar la máquina, se indica explícitamente lo que debe hacer, lo que no debe hacer o cómo el chatbot debe formular sus respuestas. El desarrollador o ingeniero aguarda la respuesta o salida del código de ChatGPT utilizando un simulador y, si es necesario, utiliza lenguaje natural para evaluar a la IA sobre la calidad y la seguridad de sus contestaciones. Una vez el modelo haya respondido del modo deseado y la solución es viable, se implementa en el robot el código final del chat de inteligencia artificial. La compañía tecnológica compartió una serie de experimentos para mostrar cuáles son las acciones a las que pueden responder los robots utilizando el modelo desarrollado por OpenAI. En primer lugar, le hizo saber los pasos que han de segurise para controlar un dron real y este supo escribir estructuras de código complejas, como un patrón en zigzag para visualizar las baldas de una estantería. ChatGPT también se utilizó con el simulador Microsoft AirSim, un escenario en el que el modelo "pudo analizar la intención del usuario" y las señales detalladas para controlar un dron con precisión. Bing ha llegado a tener hasta una crisis existencial en una conversación con un usuario. Este lenguaje se probó, incluso, en un escenario de manipulación con un brazo robótico. Tras analizar las directrices, ChatGPT supo encadenar una serie de habilidades aprendidas para, entre otras actividades, apilar bloques de madera. Los desarrolladores también optaron por atribuir a estos robots objetivos como encontrar objetos, mediante funciones de detección. Asimismo, realizó experimentos adicionales para evaluar si el chatbot puede decidir dónde dirigir a la máquina en función de lo que debía buscar. iProfesional - Copyright ©2026. Emprendimientos Corporativos S.A. Buenos Aires, Argentina. Todos los derechos reservados. Director: Norberto Zocco contacto@iprofesional.com
Images (10): 
:quality(75):max_bytes(102400)/https://assets.iprofesional.com/assets/jpg/2019/11/486391.jpg)
/https://assets.iprofesional.com/assets/public/lazyload.gif)
|
|||||
| Neura Robotics raises $1.4bn backed by Amazon, Nvidia and Qualcomm … | https://sifted.eu/articles/neura-roboti… | 9 | Jun 14, 2026 00:00 | active | |
Neura Robotics raises $1.4bn backed by Amazon, Nvidia and Qualcomm | SiftedURL: https://sifted.eu/articles/neura-robotics-1-4bn-series-c Description: German startup Neura Robotics has raised a $1.4bn Series C round from investors including crypto group Tether, Qualcomm, Amazon and Nvidia. Content:
News June 10, 2026 Freya Pratty 2 min read German startup Neura Robotics has raised a $1.4bn Series C round from investors including crypto group Tether, Qualcomm, Amazon and Nvidia. Founded in 2019, Neura builds “cognitive” robots capable of seeing, walking and manipulating objects. The new funding brings Neura’s valuation to $7bn, the Financial Times reported, citing people familiar with the deal. Other investors in the new round include Bosch, Schaeffler and the European Investment Bank (EIB). The company previously raised one of 2025’s largest robotics rounds, a €120m Series B announced from Lingotto Investment Management, Volvo Cars Tech Fund, Vsquared Ventures and HV Capital. The company says it now has an order book of over $1bn. Neura is part of a cohort of European robotics companies. The sector is seeing increased investor interest: Europe’s robotics companies raised a combined €1.6bn in 2025, up 110% from the €761m they secured in 2024. Neura, which is based in Metzingen, moved the majority of its production back from China to Germany in 2024 — in part to show confidence in Germany as a business location, and prove that Europe can spawn leading robotics companies. The company’s founder, David Reger, told the FT that Neura’s short-term target is to increase production capacity for its robots from 6,000 robots this year to tens of thousands next year. Editor's picks Opinion European founders are obsessed with Silicon Valley. Here’s why I’m not Podcast OpenAI's Laura Modiano on hackathons, Lovable and how startups can partner with the tech giant News EIF launches €15bn fund of funds to back 100 growth-stage VCs Freya Pratty Freya Pratty is Sifted's associate editor. She covers UK tech and leads Sifted's investigations. Follow her on X , LinkedIn and Bluesky Stay one step ahead with news and experts analysis on what’s happening across startup Europe. Recommended Pro Neura CEO on raising Europe’s biggest ever robotics round: ‘It’s not science fiction’ David Reger sat down with Sifted to talk raising capital, blockchain and pizza delivery Martin Coulter Samsung backs industrial robotics startup Theker in €85m round The buzzy Barcelona-based startup is building AI-powered robots to automate tasks in industrial environments Daphné Leprince-Ringuet Pro Google DeepMind chose these startups for its first robotics accelerator The companies will get three months of mentorship and technical support building AI into their core products Tom Nugent © 2026 Sifted EU Ltd. All Rights Reserved.
Images (9): 




|
|||||
| Germany’s NEURA Robotics raises up to €1.2 billion in Series … | https://www.eu-startups.com/2026/06/ger… | 10 | Jun 14, 2026 00:00 | active | |
Germany’s NEURA Robotics raises up to €1.2 billion in Series C round to build Physical AI from Europe | EU-StartupsDescription: NEURA Robotics, a Metzingen-based cognitive robotics startup and the creator of the Neuraverse, has announced a Series C funding round of up to €1.2 Content:
NEURA Robotics, a Metzingen-based cognitive robotics startup and the creator of the Neuraverse, has announced a Series C funding round of up to €1.2 billion ($1.4 billion) to build the world’s leading Physical AI platform. The financing was secured by Tether, Qualcomm Technologies, Inc., Amazon, NVIDIA, imec.xpand, Bosch, Schaeffler, European Investment Bank, Lingotto Horizon, InterAlpen Partners and others. Last year, in January, the company announced its €120 million Series B funding round led by Lingotto Investment Management, “The future of AI will not only live on screens. It will move, interact, learn and work beside us in the real world. We believe Physical AI and cognitive robotics will become one of the largest technology shifts of the coming decades, transforming industries ranging from manufacturing and logistics to healthcare, services and household robotics,” said David Reger, founder and CEO of NEURA Robotics. Founded in 2019 by David Reger, NEURA Robotics is a robotics and physical AI company building the technologies that enable intelligent machines to learn, adapt and work alongside humans in the real world. The company develops cognitive robots that can see, hear, feel and learn, as well as the software, AI and data infrastructure required to deploy them at scale. The company is building a new category of AI infrastructure where cognitive robots continuously learn, collaborate and operate across real-world environments through a shared intelligence ecosystem called the Neuraverse. Unlike traditional robotics companies focused on isolated machines or narrow industrial automation, the company states that it combines robotics, AI, sensors, edge compute and large-scale learning infrastructure into one unified platform architecture designed for global deployment. The company believes that as AI transitions from digital systems into the physical world, the next major competitive advantage will come from combining intelligence with real-world interaction, sensing and scalable deployment infrastructure. “In the future, people will not only ask what AI can say. They will ask what AI can physically do,” added Reger. To support this transition, NEURA is creating one of the world’s first open Physical AI ecosystems, known as the Neuraverse, where robots constantly share skills, capabilities, and real-world learning across various deployments. The company is also expanding its global network of NEURA Gyms, specialised large-scale training environments combining real-world sensor interaction, simulation and multimodal learning pipelines to create one of the largest real-world robotics data infrastructures globally. “Many believed globally relevant AI infrastructure companies could only emerge from Silicon Valley. We believe the next generation of AI leaders can emerge anywhere in the world where there is enough vision, engineering talent and execution speed. With this financing, NEURA is firmly among the global leaders in the robotics race, alongside the best in the US and China. At the end, this is not only about robotics. It is about building technologies the world will depend on,” Reger noted. NEURA is also shaping decentralised AI architectures, edge intelligence and machine-native economic systems in collaboration with strategic infrastructure partners. The company believes that trusted, open and interoperable robotics ecosystems will become increasingly important as AI systems move into factories, logistics centres, healthcare environments and homes. Nicola Beer, Vice President of European Investment Bank, said, “By backing NEURA Robotics, the European Investment Bank is putting serious European firepower behind the next wave of physical AI and cognitive robotics. Through TechEU Europe’s most innovative mid-caps can access patient capital they need to turn cutting-edge research into globally competitive products and skilled jobs here in Europe. From safer factories and smarter logistics to entirely new services, NEURA’s open Neuraverse platform will help thousands of robots learn from each other in real time – accelerating innovation, strengthening Europe’s technological autonomy and turning AI into tangible benefits for workers and businesses.” With this capital, the company plans to accelerate the global deployment of cognitive robots and humanoids, expand the Neuraverse platform, roll out NEURA Gyms, scale manufacturing and deployment infrastructure, and develop next-generation Physical AI systems. The company is also ramping up manufacturing and aims to produce several million robots by 2030. It intends to bring its humanoid 4NE1 to industrial clients at scale, starting with the sectors that need it most. Additionally, it is growing its presence from Europe to the US, China, and Japan. NEURA collaborates strategically with top industrial and AI companies such as Bosch, Schaeffler, Kawasaki, Delta Electronics, Qualcomm Technologies, Amazon, and NVIDIA. It reports that its existing orderbook and strategic deployment pipeline exceed €864.8 million ($1 billion). EU-Startups.com is the leading online magazine about startups in Europe. Learn more about us and our advertising options. © Menlo Media S.L. - All rights reserved.
Images (10): 
|
|||||
| Neura Robotics Raises Record $1.4B in Funding Round - Ventureburn | https://ventureburn.com/neura-robotics-… | 10 | Jun 14, 2026 00:00 | active | |
Neura Robotics Raises Record $1.4B in Funding Round - VentureburnURL: https://ventureburn.com/neura-robotics-raises-record-1-4b-in-funding-round/ Description: Neura Robotics secures $1.4 billion in fresh funding, marking one of Europe’s largest robotics investment rounds. Content:
By Ekemini Key Takeaways Neura Robotics secured a historic Series C round of up to $1.4 billion, marking the largest venture capital funding round in German history. Backed by elite tech giants including Nvidia, Amazon, Qualcomm, and Tether, the financing round elevates Neura’s total valuation to roughly $7 billion. The company focuses on transitioning AI out of screens and into the physical world, creating cognitive robots capable of learning, sensing, and collaborating alongside humans. Neura Robotics, a leading designer and manufacturer of cognitive robotic systems, has finished a groundbreaking Series C financing of up to $1.4 billion. The significant funding round was the biggest venture financing round ever raised by a German company and remains the world record for an end-to-end robotics organisation. This funding round catapults Neura Robotics into the elite of heavily capitalised AI and robotics startups in the world, boosting the company’s valuation to nearly $7 billion. A huge consortium of giants from tech, manufacturing and finance financed the round with Tether, Nvidia, Amazon, Qualcomm Technologies, and imec.xpand. Strategic industrial allies Bosch and Schaeffler were also among the investors, together with public institutions such as the European Investment Bank. Traditional artificial intelligence has been confined to data consumed behind the screen of a computer. Recent advances in machine learning, however, are moving toward a new era of physical AI that interacts with the real world. Neura Robotics describes this shift as ‘NeuroRobotics’. The company develops cognitive robots that see, hear, touch, and interpret their environment to adapt their actions in real time. Source: unsplash Neura’s systems depart from traditional industrial machinery, which is typically costly, inflexible, and requires extensive manual programming of its software to alter how it operates. Against these standards, Neura’s ecosystem embeds multimodal sensing and edge computing into the robot’s chassis. This enables their hardware to learn by demonstration and behave safely around people in highly variable production areas such as logistics warehouses, hospitals, and assembly lines. More News: Mecka AI Raises $60M to Train Robots With Human Data But the most important use of the 1.4 billion dollars the company has just raised is for the creation of a free, common intelligence called the “Neuraverse”. Instead of having each device learn skills in isolation, Neuraverse lets devices share deeply secure operating data, instantly transfer power and learned skills from one piece of hardware to another anywhere in the world. To speed up this collaborative learning cycle, Neura Robotics is building a broad network of real-world training centers called “NEURA Gyms”. These costly facilities enable them to leapfrog the constraints of training robots only in virtual space. Here, human instructors wearing motion-capture suits can teach robots particular real-world motions, like handling delicate supplies or using advanced machinery. With this hands-on, data-intensive training approach, the core AI models can optimize tasks far more rapidly than models trained on pure vision or algorithmic hunches. Capital will be used to scale Neura’s incredible line of multipurpose hardware products. Neura’s flagship is the 4NE1, a cutting-edge humanoid robot capable of lifting up to 220 pounds and performing a variety of multipurpose functions, including automated car assembly lines or household assistance. In addition to humanoid models, Neura is manufacturing highly mobile transports such as the MAV series, which can carry up to 1.5 tons of goods in a busy warehouse environment with laser-scanning maps that can prevent collisions. The company is also manufacturing versatile cognitive robotic arms, known as LARA and MAiRA, which can be used in a wide cross-section of precision manufacturing applications. Ekemini I'm a crypto writer with 4+ years of experience passionate about turning big, technical ideas into content anyone can understand. From blockchain to stablecoins to everything in between, I enjoy helping readers stay informed in a space that never stops moving. Disclaimer VentureBurn is a media platform covering the latest in cryptocurrency, artificial intelligence, venture capital, and the startup ecosystem. Opinions expressed on VentureBurn are for informational purposes only and do not constitute investment advice. Before making any high-risk investments in digital assets or emerging technologies, readers should conduct their own due diligence. All transactions and financial decisions are made at your own risk, and any losses incurred are solely your responsibility. VentureBurn does not endorse or recommend the buying or selling of any digital assets and is not a licensed investment advisor. Please note that VentureBurn may participate in affiliate marketing programs. Editor's Choice Critical Loop Raises $26M to Accelerate Flexible Power Expansion 10 Best Decentralized Crypto Exchanges (DEXs) in 2026 10 Best Free AI Image Generators in 2026 (Ranked & Reviewed) Best Crypto Staking Platforms With Highest APY Apr 2026 10 Best Crypto Mining App Options in 2026 (Free & Legit) Table of Contents Related articles F2 Raises $24M to Expand AI for Private Credit Ares Secures $12.7 Billion in Major Fundraising Push Two Desperados Secures $20M UA Financing to Scale Mobile Gaming Portfolio TensorWave Raises $350M to Expand AI Infrastructure Evotrex Raises $30M Series A to Advance Power-Generating RV Development Latest crypto news 10 Best Travel Insurance Companies in 2026 (Comprehensive Reviews) What is TradFi? Top Crypto Exchanges for TradFi in June 2026 What Is Cryptocurrency Mining & How Does It Work? Superhuman Email Review 2026: Is It a Good Video & Image AI Generator? Zapier Review 2026: Is It A Good Automation Tool? What Is CEX in Crypto? Guide to Centralized Exchanges Replit Review 2026: Is It A Good Video & Image AI Generator? SonoThera Raises $125M to Advance Gene Therapy KOHO Raises $130M to Accelerate Banking Ambitions Nesto Raises $302M in Series E at $1.47B Valuation VentureBurn is a global news and insights platform covering the latest trends and developments across the technology landscape – including cryptocurrency, artificial intelligence, venture capital, and startups. Our mission is to empower entrepreneurs, investors, and tech enthusiasts with high-quality journalism, practical guides, and expert analysis to navigate and thrive in the rapidly evolving innovation economy. Category About Subcribe to our newletter Top tech news & guides in crypto, AI, VC, and startups — weekly in your inbox.
Images (10): 


|
|||||
| Neura: German Robotics Unicorn Secures $1.4 Billion From Tether, Nvidia, … | https://www.trendingtopics.eu/neura-ger… | 10 | Jun 14, 2026 00:00 | active | |
Neura: German Robotics Unicorn Secures $1.4 Billion From Tether, Nvidia, AmazonDescription: NEURA Robotics has closed a Series C funding round of up to $1.4 billion. The company, based in Metzingen, is using the capital to accelerate the Content:
NEURA Robotics has closed a Series C funding round of up to $1.4 billion. The company, based in Metzingen, is using the capital to accelerate the development of its Physical AI platform and the scaling of cognitive robotic systems. Investors include Tether, Qualcomm Technologies, Amazon, NVIDIA, imec.xpand, Bosch, Schaeffler, the European Investment Bank, Lingotto Horizon, and InterAlpen Partners. According to the company, the funding round represents the largest capital injection to date for a full-stack robotics company. NEURA plans to use the capital to scale serial production to several million robots by 2030 and to expand its global network of NEURA Gyms — training environments for cognitive robots in real-world deployment scenarios. NEURA positions itself as an infrastructure provider for a new category of AI systems. The company combines robotics, artificial intelligence, sensor technology, edge computing, and learning infrastructure within a unified platform architecture called Neuraverse. Unlike traditional robotics approaches, this platform enables cognitive robots to continuously share skills and learning experiences. The strategic partnerships with Bosch, Schaeffler, Kawasaki, Qualcomm Technologies, Amazon, and NVIDIA anchor NEURA at the intersection of industrial automation and artificial intelligence. The company’s current order backlog and deployment pipeline exceed one billion US dollars. Founder and CEO David Reger describes the company’s strategic direction: “The future of AI will not simply take place on screens. It will move, interact, learn, and work alongside us in the real world. We are convinced that Physical AI and cognitive robotics will lead to one of the greatest technological leaps of the coming decades.” The new capital will flow into the global deployment of cognitive and humanoid robots, the expansion of the Neuraverse platform, the rollout of the NEURA Gyms, and the build-up of production and scaling capacities. Reger emphasizes the global competitive position: “Many have believed that globally relevant AI infrastructure companies could only emerge in Silicon Valley. We believe that the next generation of AI market leaders can emerge anywhere in the world — wherever vision, engineering talent, and execution speed come together.” With Neuraverse, NEURA is developing an open ecosystem in which robots exchange skills, competencies, and real-world learning experiences. The NEURA Gyms combine real sensor data, simulation, and multimodal learning processes, thereby building one of the world’s largest real-world robotics data infrastructures. Together with infrastructure partners, the company is shaping decentralized AI architectures, edge intelligence, and machine-based economic systems. NEURA pursues the thesis that open, trustworthy, and interoperable robotics ecosystems will grow in importance as AI systems increasingly penetrate factories, logistics centers, healthcare facilities, and private households. The investors underline NEURA’s technological and strategic position. Paolo Ardoino, CEO of Tether, states: “Autonomous machines need the ability to process information locally, make decisions, and execute transactions without relying on centralized intermediaries.” Nakul Duggal of Qualcomm Technologies adds: “Physical AI is the next major evolution of computing, extending intelligence into real-world environments. Robotics is one of the most demanding edge AI use cases, where systems must perceive, reason, and act in real time, reliably and locally.” Stefan Hartung, CEO of Robert Bosch GmbH, emphasizes: “In the field of humanoid robotics, we see significant growth opportunities — and through our partnership with NEURA, we are well positioned to capitalize on them more decisively.” Nicola Beer, Vice President of the European Investment Bank, highlights the strategic significance for Europe: “NEURA’s open Neuraverse platform will help thousands of robots learn from one another in real time, thereby accelerating innovation, strengthening Europe’s technological autonomy, and turning AI into tangible benefits for workers and businesses.” NEURA Robotics was founded in 2019 in Metzingen and develops cognitive robots as well as the associated software, AI, and data infrastructure for their worldwide deployment. The company responds to structural changes such as aging populations, labor shortages, and growing demand for skilled activities. Its mission is to make physical capabilities scalable by drastically reducing the time needed to teach machines new skills and deploy them globally. With cognitive robots, the NEURA Gyms, and Neuraverse, the company is creating the foundation for intelligent machines intended to help solve global challenges. Aus Datenschutz-Gründen ist dieser Inhalt ausgeblendet. Die Einbettung von externen Inhalten kann in den Datenschutz-Einstellungen aktiviert werden: Datenschutz-Einstellungen
Images (10): 



|
|||||
| AGIBOT Brings APC 2026 to Indonesia, Accelerating Local Deployment of … | https://en.antaranews.com/news/418736/a… | 4 | Jun 13, 2026 16:01 | active | |
AGIBOT Brings APC 2026 to Indonesia, Accelerating Local Deployment of Embodied AI - ANTARA NewsDescription: AGIBOT, a global leader in embodied AI and robotics, hosted AGIBOT Partner Conference 2026 in Indonesia (APC 2026 Indonesia) in Jakarta, together with its ... Content:
© 2020 Reporter: PR WireEditor: PR Wire Copyright © ANTARA 2026
Images (4): 


|
|||||
| Why Embodied AI Is The Next Frontier Tech | https://www.forbes.com/councils/forbest… | 7 | Jun 13, 2026 16:01 | active | |
Why Embodied AI Is The Next Frontier TechDescription: That difference—not model size or novelty—is what makes embodied AI harder to deploy and more consequential when it fails. Content:
ByVishal Talwar, Forbes Councils Member. Vishal Talwar - Sr. Vice President and Sector Head Technology - New Age Vertical at Wipro. As with every year, Frontier Tech innovators and industry watchers followed CES 2026 closely. This year felt like a turning point for embodied AI. What stood out wasn’t just what these systems could do, but where they were doing it—in open fields, in backyards and inside living spaces—far beyond controlled demos or research labs. When intelligence moves beyond software interfaces and begins to operate in physical environments, the stakes change. Systems no longer react to prompts on a screen. They engage with the real world. For enterprises, the question is no longer whether to move with this shift, but how to do so responsibly. In digital systems, errors are usually tolerable. If an AI model generates the wrong image or gives an incorrect answer, you correct it, rerun it and move on. The consequences are limited. However, when intelligence is embedded in the physical world, hallucination comes at a massive cost. Consider a simple, neutral object like a glass bottle on the road. For software-based AI, it is irrelevant. For an intelligent vehicle moving at speed, that same object triggers a cascade of decisions involving momentum, material behaviour, surrounding traffic and human safety. The system has to reason with the world as it exists, in real time, without bias and with safety as a focal point. Physical environments are noisy and unpredictable, forcing systems to interpret incomplete signals, anticipate what might happen next and make trade-offs under time pressure. There is rarely a single correct answer, only the least risky one in the moment. This is why embodied AI demands more than fluent outputs or pattern matching. Perception and reasoning have to work together under uncertainty, with little margin for error. That difference—not model size or novelty—is what makes embodied AI harder to deploy and more consequential when it fails. Many leaders think of embodied AI as an extension of existing AI systems, with a robot or device added at the end. In practice, it behaves more like a tightly coupled system, where perception, reasoning, movement and compute work together continuously. This matters because once intelligence operates in the physical world, small gaps between these layers quickly turn into real problems. That’s why teams working with embodied AI pay close attention to how different parts of the stack interact. • Multimodal perception helps systems make sense of incomplete or conflicting signals. • Simulation is used not just to test performance, but to expose systems to situations they cannot safely encounter during live training. • Robotics platforms translate decisions into physical action, where timing and safety matter as much as accuracy. • Edge compute ensures those decisions happen fast enough to be useful when the environment doesn’t wait. None of these elements alone solves the problem. Together, they determine whether intelligence behaves reliably once it leaves controlled settings. Even then, this stack is only the starting point. In practice, this is where many embodied AI initiatives begin to struggle. Models that perform well in simulation often falter in live environments because the real world isn’t neat or predictable. Small changes in lighting, sensor noise and the fact that people don’t always move the way a test script assumes can all lead to "brittle behaviour" once systems leave controlled environments. Closing this gap requires rethinking around how systems are prepared before deployment. Teams must broaden the conditions under which models are trained deliberately. Companies like NVIDIA are pushing this approach through platforms such as Isaac Sim and Omniverse, where robots can be exposed to thousands of simulated environments and edge cases before operating in the real world. These systems generate large volumes of synthetic training data while NVIDIA’s robotics foundation models, including its GR00T humanoid model, give robots a broader set of physical skills that can transfer across tasks and operating conditions. However, addressing the simulation gap doesn’t solve the puzzle. Embodied AI also faces constraints around data, hardware coordination and real-time operation, which make deploying across changing environments far more complex than scaling purely digital AI. Other industry innovators are beginning to test embodied AI systems directly in real-world environments. Tesla’s Optimus humanoid robot is designed to operate in environments built for humans and combines perception, motion planning and mechanical dexterity to perform repetitive and physically demanding tasks. Tesla has begun deploying early prototypes inside its factories, where robots are being tested on tasks such as material handling and basic assembly. The robots function as general-purpose workers able to handle both physical and cognitive labor, including warehouse sorting, data entry and administrative tasks.[i] Humanoid capability and reliability are key aspects Tesla is focused on.[ii] These early deployments are less about full autonomy and more about gathering real-world interaction data on how robots move through spaces, manipulate objects and operate alongside human workers. Each iteration helps improve how machines perceive and respond to the physical world. Together, efforts like these show how progress in embodied AI is unfolding along two parallel tracks: large-scale simulation environments that prepare systems for variability and controlled real-world deployments that refine how those systems behave outside the lab. For enterprises exploring embodied AI, the priority should not be speed but clarity of purpose. The most successful initiatives start in environments where systems can assist rather than fully replace human work, allowing teams to observe how machines behave under real operating conditions. Organizations should also recognize that embodied AI requires a different level of preparation. Perhaps most importantly, enterprises need to treat early deployments as learning systems. Leaders need to assess whether their organizations are ready to deploy intelligence responsibly once it begins to act in the real world. Competitive edge will come from knowing where embodied AI belongs, where it does not and how humans and machines can work together when the cost of being wrong is exponentially high. Forbes Technology Council is an invitation-only community for world-class CIOs, CTOs and technology executives. Do I qualify?
Images (7): 




|
|||||
| AI Designed Robots Evolve | https://www.i-programmer.info/news/169-… | 4 | Jun 13, 2026 08:00 | active | |
AI Designed Robots EvolveURL: https://www.i-programmer.info/news/169-robotics/18902-ai-designed-robots-evolve-.html Description: Programming book reviews, programming tutorials,programming news, C#, Ruby, Python,C, C++, PHP, Visual Basic, Computer book reviews, computer history, programming history, joomla, theory, spreadsheets and more. Content:
Researchers at Northwestern University have developed modular robots using artificial intelligence. The idea is that the robots can be combined and recombined in the wild, recover from injury, and keep moving no matter what's thrown at them. Dubbed "legged metamachines" by the researchers, the robots are made from autonomous, Lego-like modules that snap together into multiple configurations. Each module by itself is a complete robot with its own motor, battery, and computer, and the ability to roll, turn and jump. Rather than start from a classic configuration such as humans or dogs, the engineers used AI to evolve novel body configurations. The reasoning for this was that while today's robots can be fast and agile, their body shapes are often fixed and rigid. Most robots cannot adapt to new tasks, environments, or physical damage. If a robotic dog breaks a leg, for example, in most cases the whole device is compromised. To come up with a better option, Kriegman's team started with an evolutionary algorithm that mimics natural selection, and gave the algorithm robotic building blocks consisting of modular legs half a meter long, joined by a central sphere. Kriegman said: "Inside the sphere, the robot has everything it needs to survive: a 'nervous system,' a 'metabolism' and 'muscle'. By that, I mean a circuit board, a battery, and a motor. The modules are mechanically simple. They can only rotate around a single axis, but they are surprisingly athletic and smart." The algorithm was then given the goal of designing a robot with efficient, versatile movement by mixing and matching the modules in different combinations. As it generated new body types, the actions and performance of each design was simulated, and the best performers were kept and the weaker ones discarded. Better designs were then combined or mutated, so modular legs became legs, spines, or tails. To test the designs, Kriegman and his team assembled the best three-, four-, and five-legged designs found by evolution. In outdoor tests, the metamachines ran across rough terrain, including gravel, grass, tree roots, leaves, sand, mud, and uneven bricks. They jumped, spun, and righted themselves when flipped, without complicated setup or retraining. The advantage of these robots over traditional robots that fail when a single part breaks is that they can adapt, recover, and survive. Even when a leg breaks off, the metamachine remains resilient. The modules adapt to a missing leg and keep moving. The missing leg, too, can roll home and rejoin its team. Kriegman said: "They hit the ground running, can move freely in the wild and easily recover from major injuries that would be fatal to every other wild robot. If flipped upside down, they instinctively bring themselves upright and continue their journey. They can survive being chopped in half or cut up into many pieces. When separated, every module within the metamachine can become an individual agent." The study was published in the Proceedings of the National Academy of Sciences. Agile legged locomotion in reconfigurable modular robots Meet Ringbot Quad - A Bio-Transcending Robot Robotic Mice Check Out Large Hadron Collider Researchers Use AI And Robot Dogs To Detect Wildfires Flying Robot Baby Takes Off Robotic Gut Spider For Exploring Digestive Tract To be informed about new articles on I Programmer, sign up for our weekly newsletter, subscribe to the RSS feed and follow us on Facebook or Linkedin. To be informed about new articles on I Programmer, sign up for our weekly newsletter, subscribe to the RSS feed and follow us on Facebook or Linkedin. Rust on the Rise; Python in Decline?10/06/2026OK, I’m exaggerating and making any comparison between Rust and Python is an unrealistic exercise, but my point is that there is a reason in common to explain Rust’s rise and Python’s apparent d [ ... ] + Full Story Jetpack Compose Improves Input Handling21/05/2026There's a new version of Android Jetpack with updated core Compose models, shared element debug tools, and new trackpad events. + Full StoryMore NewsdtSearch Adds Internal PDF ViewerArduino Makes Progress On ZephyrMassachusetts' Institute of Technology Introduction to Deep LearningGoogle Adds ReImagine To PhotosMicrosoft Coreutils Adds Linux Commands To WindowsAI Increasingly Embraced by Web Devs.NET Agent SkillsA Bomber Jacket With A DifferenceElephants, Goldfish and the New Golden Age of Software EngineeringThe Story of C++: The DocumentaryDrilling For Oil - A Kaggle ContestGitHub Cuts Token Use To Reduce Bills OK, I’m exaggerating and making any comparison between Rust and Python is an unrealistic exercise, but my point is that there is a reason in common to explain Rust’s rise and Python’s apparent d [ ... ] OK, I’m exaggerating and making any comparison between Rust and Python is an unrealistic exercise, but my point is that there is a reason in common to explain Rust’s rise and Python’s apparent d [ ... ] There's a new version of Android Jetpack with updated core Compose models, shared element debug tools, and new trackpad events. There's a new version of Android Jetpack with updated core Compose models, shared element debug tools, and new trackpad events. Comments Make a Comment or View Existing Comments Using Disqus or email your comment to: comments@i-programmer.info Make a Comment or View Existing Comments Using Disqus or email your comment to: comments@i-programmer.info
Images (4): 



|
|||||
| VinDynamics and Skild AI form strategic partnership to advance humanoid … | https://www.manilatimes.net/2026/06/08/… | 10 | Jun 13, 2026 00:00 | active | |
VinDynamics and Skild AI form strategic partnership to advance humanoid ROBOTICS | The Manila TimesDescription: **media[1089083]** Content:
SAN MATEO/HANOI - Media OutReach Newswire - 8 June 2026 - VinDynamics, a robotics technology company within Vingroup, and Skild AI, a company developing foundation models for robotics, today announced the signing of a strategic Memorandum of Understanding (MOU) to collaborate on humanoid robotics and embodied AI. The move marks another step in VinDynamics' strategy to accelerate humanoid robotics development through global collaboration and advanced technology partnerships. Under the MOU, the collaboration will focus on embodied AI research, robot manipulation, sim-to-real transfer, edge AI deployment, and validation of humanoid systems in real-world environments. Both companies will also explore opportunities to integrate The Skild Brain, Skild AI's omnibodied AI software, into VinDynamics' humanoid robots. The Skild Brain runs directly on robotic hardware and enhances the adaptability, efficiency, and reliability of humanoid systems in practical applications. Additional areas under discussion may include knowledge exchange related to robot intelligence and real-world deployment, as well as potential cooperation in software, model, and hardware development, alongside the potential manufacturing of humanoid robots at scale. The partnership brings together VinDynamics' robotics engineering, manufacturing capabilities, and real-world deployment ecosystem with Skild AI's foundation model technology. Together, the companies aim to accelerate the development and deployment of humanoid robots capable of operating in complex and dynamic environments, while supporting growing demand for intelligent robotic systems across industries including manufacturing, logistics, hospitality, and commercial services. Prof. La Manh Hung, President, VinDynamics, said: "This partnership represents an important step for VinDynamics as we continue building scalable humanoid robotics platforms for real-world deployment. Skild AI brings the most exciting advances in embodied AI today. Combined with our robotics platform and manufacturing capabilities, we believe this partnership can accelerate the deployment of humanoid robots in complex environments." Mr. Deepak Pathak, Co-Founder and CEO of Skild AI, said: "The future of robotics depends on combining scalable physical systems with adaptable, general-purpose intelligence. VinDynamics brings strong engineering capabilities, manufacturing scale, and access to real-world deployment environments through the Vingroup ecosystem. We are excited to work together to advance embodied AI for practical applications." Established in September 2025, VinDynamics is a pioneering company in the field of humanoid robotics within Vingroup. The company is dedicated to developing versatile, human-centric robots capable of seamless integration into everyday life, with the scalability to support global deployment. Hashtag: #VinDynamics The issuer is solely responsible for the content of this announcement. Learn more at: https://vindynamics.net/en Learn more at: https://www.skild.ai/
Images (10): 
|
|||||
| Interested in Humanoid Robot Stocks? You Might Consider Buying This … | https://finance.yahoo.com/markets/stock… | 2 | Jun 13, 2026 00:00 | active | |
Interested in Humanoid Robot Stocks? You Might Consider Buying This Humanoid Robotics ETFDescription: This humanoid robotics ETF (KOID) has been performing wonderfully, though it's only been in existence for about a year. Content:
Oops, something went wrong Humanoid robots -- along with fully driverless vehicles -- are widely viewed among artificial intelligence (AI) experts as one of the Next Big Things in AI. Once limited to science fiction media, they are now being rapidly developed. Humanoids are AI-powered machines that resemble the human form and move and communicate similarly to humans. Artificial intelligence-driven applications are improving at lightning speed. Indeed, Nvidia (NASDAQ: NVDA) CEO Jensen Huang is a huge believer that the humanoid robot boom is coming. Missed Nvidia in 2009? This Rare Signal Is Flashing Again. In 2009, a "Double Down" signal flashed for a little-known chipmaker called Nvidia. For the first time in years, that same "Total Conviction" signal is flashing for a company 1/100th the size of Nvidia. Continue » In January 2025, during CES 2025, Huang opined that, in "less than 10 years," he was "certain" that humanoid robots would surprise everyone with how good they would be. With big money pouring into humanoid development, I think the timeline could be shorter for humanoids performing repetitive manual labor within a specified area, such as a factory. In October 2025, I wrote The Best Humanoid Robot Stocks to Buy or Put on Your Watch List. I highlighted Nvidia (which has ramped up its humanoid robot development platform since 2024), Tesla (developing Optimus), Hyundai Motor Group (owns an 80% stake in mobile robot maker Boston Dynamics), and Hon Hai Precision (known as Foxconn), which is partnering with Nvidia to build a plant in Texas that will build AI supercomputers and eventually deploy humanoid robots. But at this early stage, no publicly traded company seems to be generating significant revenue from the sale of humanoid robots or components used to make them. So, investors might want to spread their bets, so to speak, by investing in an exchange-traded fund (ETF) focused on humanoid robots. While there will be some losers, the diversity of ETFs means there will likely be some big winners, too. (Note: The name shown in the chart below is the ETF's former name.) KraneShares Global Humanoid Robotics and Physical AI Index ETF (NASDAQ: KOID) was the first ETF focused on humanoid robotics and physical AI, rather than on robotics as a whole. It began trading on the Nasdaq exchange on June 4, 2025. To my knowledge, there is only one other such ETF, and its assets under management (AUM) are considerably lower than KOID's. As its name suggests, KOID is an index-based ETF. Most of its stock holdings are listed on exchanges in the United States, China, and Japan. While I'm not fond of Chinese stocks in general, I think they're OK in global ETFs, as long as they don't notably predominate. Moreover, China is one of the leaders in robotics, so it wouldn't be a good idea to exclude it from such an ETF. KOID has 50 stock holdings, so it has significant diversity. The ETF invests "across the broad spectrum of the humanoid ecosystem, including the 'brain' (semiconductors and technology), the 'body' (actuation systems, mechanical systems, sensing and perception, critical materials), and humanoid ' integrators' and manufacturing companies," per its website. KraneShares Global Humanoid Robotics and Physical AI Index ETF's AUM were $242.6 million, and its net annual expense ratio was 0.69%, as of May 29. ETF/Index YTD 2026 Return Return Since KOID Inception on June 4, 2025 KraneShares Global Humanoid Robotics and Physical AI Index ETF 31.4% 66.8% S&P 500 Index 11.3% 29.1% Data source: YCharts. YTD = year to date. Data as of May 29, 2026. Holding No. Company Headquarters Market Cap Wall Street's Projected Annualized EPS Growth Over Next 5 Years Weight (% of Portfolio) 1-Year Return 1 Credo Technology (NASDAQ: CRDO) U.S. $43.5 billion 115% 3.71% 277% 2 Infineon Technologies (OTC: IFNNY) Germany $125 billion -- 3.25% 141% 3 STMicroelectronics (NYSE: STM) Switzerland $63.2 billion 85.7% 3.13% 181% 4 Harmonic Drive Systems (OTC: HSYDF) Japan 751 billion Japanese yen = approx. $4.7 billion -- 3.10% 117% 5 Renesas Electronics (OTC: RNECY) Japan 8.4 trillion Japanese yen = approx.$52.7 billion -- 3.03% 129% 6 Doosan South Korea 35.2 trillion South Korean won = approx.$23.4 billion -- 2.69% -- 7 THK Japan $5.4 billion -- 2.53% -- 8 HIWIN Technologies Taiwan 137.6 billion New Taiwan dollars = approx. $4.4 billion -- 2.49% -- 9 NXP Semiconductors Netherlands $81.1 billion 20.1% 2.47% 67% 10 Leader Harmonious Drive Systems China 56.1 billion Chinese yuan = approx. $23.1 billion -- 2.42% -- Total top 10 N/A N/A N/A N/A 28.82% N/A Overall ETF N/A N/A Total net assets of $243 million N/A 100% N/A N/A S&P 500 N/A N/A N/A N/A 30.3% Data sources: KraneShares Global Humanoid Robotics and Physical AI Index ETF, finviz.com, and YCharts. EPS = earnings per share. Data as of May 29, 2026. Here's a brief look at the top five holdings: Credo Technology is a Silicon Valley-based semiconductor (or chip) company focused on high-speed, power-efficient connectivity solutions for AI-enabled data centers. The company went public in January 2022. Infineon Technologies designs and manufactures semiconductors, including microchips, sensors, and power management systems. Its key markets include green energy, mobility (especially automotive), and the Internet of Things (IoT). STMicroelectronics designs and manufactures semiconductor solutions, including microchips, microcontrollers, sensors, and power transistors. Key markets include auto, industrial (including robotics), and IoT. The company states that it provides over 500 components for humanoid robots. Harmonic Drive Systems provides internal components for humanoid robots. For example, its gearboxes and rotary actuators are used to control humanoid joints, including shoulders, elbows, hips, and wrists. Before you buy stock in Nvidia, consider this: The Motley Fool Stock Advisor analyst team just identified what they believe are the 10 best stocks for investors to buy now… and Nvidia wasn’t one of them. The 10 stocks that made the cut could produce monster returns in the coming years. Consider when Netflix made this list on December 17, 2004... if you invested $1,000 at the time of our recommendation, you’d have $463,900!* Or when Nvidia made this list on April 15, 2005... if you invested $1,000 at the time of our recommendation, you’d have $1,294,401!* Now, it’s worth noting Stock Advisor’s total average return is 978% — a market-crushing outperformance compared to 211% for the S&P 500. Don't miss the latest top 10 list, available with Stock Advisor, and join an investing community built by individual investors for individual investors. See the 10 stocks » *Stock Advisor returns as of May 31, 2026. Beth McKenna has positions in Nvidia. The Motley Fool has positions in and recommends NXP Semiconductors, Nvidia, and Tesla. The Motley Fool has a disclosure policy. Interested in Humanoid Robot Stocks? You Might Consider Buying This Humanoid Robotics ETF was originally published by The Motley Fool Sign in to access your portfolio
Images (2): 
|
|||||
| Why humanoid robots and physical AI could be tech's next … | https://www.foxbusiness.com/markets/tap… | 10 | Jun 13, 2026 00:00 | active | |
Why humanoid robots and physical AI could be tech's next big thing | Fox BusinessURL: https://www.foxbusiness.com/markets/tap-humanoid-robotics-boom-etf Description: Humanoid robots designed to work alongside humans are part of the growing physical AI landscape that some investors see as the next major tech investment theme. Content:
Quotes displayed in real-time or delayed by at least 15 minutes. Market data provided by Factset. Powered and implemented by FactSet Digital Solutions. Legal Statement. This material may not be published, broadcast, rewritten, or redistributed. ©2026 FOX News Network, LLC. All rights reserved. FAQ - New Privacy Policy Payne Capital Management President Ryan Payne and market analyst Dan Geltrude discuss the AI boom, SpaceX’s IPO, Microsoft’s new coding model and OpenAI’s expansion on ‘Mornings with Maria.’ Although the artificial intelligence (AI) investment thesis is still young, some investors are already eyeing the next big thing in tech. They don't have to look far, and the next big thing may actually be two things: humanoid robots and physical AI. Fortunately, these aren't daunting concepts. As the name indicates, humanoid robots are modeled after us and designed to work alongside us, performing basic functions to enhance productivity. Those robots are part of the broader physical AI landscape, which also includes various autonomous systems such as self-driving vehicles and surgical robots. Experienced investors know there are plenty of robotics stocks and a fair number of exchange-traded funds (ETFs) focused on this theme. Still, when it comes to an emphasis on humanoid robotics, the KraneShares Global Humanoid Robotics and Physical AI Index ETF is the ETF to consider. HOW ETFS CAN BE EFFECTIVE BUILDING BLOCKS FOR RETIREES Humanoid robots are part of the broader physical AI landscape. (Getty Images) This robotics fund, which tracks the MerQube Global Humanoid and Embodied Intelligence index, is the first ETF of its kind to trade in the U.S., and it has a first-mover advantage. Investors like that, along with the fund's purity because it turns a year old on June 4 and already has $241 million in assets under management (AUM). WHAT ARE ACTIVE ETFS AND HOW ARE THEY RESHAPING HOW AMERICANS INVEST? Year-to-date inflows of $89 million bolster that tally, confirming that investors see opportunity with this next-generation tech ETF. Understandably, they feel that way because the KraneShares fund could reward long-term investors. Morgan Stanley estimates that the humanoid robotics market could be worth $5 trillion by 2050. Perhaps underscoring the case for taking the long view with this ETF is the fact that humanoid robots are currently expensive. Still, prices are forecast to decline, which should spark increased adoption. Two years ago, one humanoid robot cost $200,000. That's the price of a house in some places; Morgan Stanley sees that price falling to $150,000 in 2028. As investors already learned with "old guard" AI stocks, adoption trends and the emergence of more real-world uses are crucial to the humanoid robotics/physical AI theme. Stock-picking to that effect can be tricky even for highly seasoned investors, highlighting why some are embracing this ETF. US ETF ASSETS UNDER MANAGEMENT TO MORE THAN DOUBLE TO $25T BY 2030, CITIGROUP SAYS At the sector level, robotics stocks span multiple sectors. (Spencer Platt/Getty Images) It's worth noting that, at the sector level, robotics stocks span multiple sectors. Featuring exposure to four sectors, this ETF reflects this with tech and industrial stocks combining for about 78% of the portfolio. It should also be acknowledged that humanoid robotics isn't a theme bound by geography, so this is a global ETF, not a domestic one. The 28% allocation to Chinese stocks, second only to U.S. equities, is important because China is the undisputed leader in AI-powered robotics, including humanoids. Of course, there are no guarantees that China will wear that crown permanently, highlighting the advantages of this fund's geographic diversity. The KraneShares Global Humanoid Robotics ETF charges 0.69% per year, or $69 on a $10,000 investment. That's slightly above the 0.63% average on thematic ETFs. GET FOX BUSINESS ON THE GO BY CLICKING HERE Todd Shriber has no position in any of the stocks mentioned. The Motley Fool has no position in any of the stocks mentioned. The Motley Fool has a disclosure policy. Get a brief on the top business stories of the week, plus CEO interviews, market updates, tech and money news that matters to you. We've added you to our mailing list. By clicking subscribe, you agree to the Fox News Privacy Policy and Terms of Use, and agree to receive content and promotional communications from Fox News. You understand that you can opt-out at any time. Quotes displayed in real-time or delayed by at least 15 minutes. Market data provided by Factset. Powered and implemented by FactSet Digital Solutions. Legal Statement. This material may not be published, broadcast, rewritten, or redistributed. ©2026 FOX News Network, LLC. All rights reserved. FAQ - New Privacy Policy
Images (10): 



|
|||||
| Tianjin develops sensors for embodied AI | http://www.ecns.cn/news/sci-tech/innova… | 10 | Jun 12, 2026 08:00 | active | |
Tianjin develops sensors for embodied AIURL: http://www.ecns.cn/news/sci-tech/innovation/2026-06-10/detail-ihffinvk9814912.shtml Content:
On sorting lines in smart factories, at precision workstations in automobile manufacturing plants and even at home tending to household chores, a batch of robots equipped with multidimensional tactile sensors can dexterously grasp, operate and adaptively perform tasks, accomplishing movements that were once only possible for humans. These robots, capable of sensing pressure, texture and posture, possess "tactile fingertips", enabling artificial intelligence to transition from virtual algorithms to the real world. This is the industrial transformation brought about by embodied intelligence, and the core "sensory organs" enabling it all originate from Tianjin. "Robots are important carriers of AI, facilitating its transition from the virtual world to reality," said Yin Jihui, secretary of the Hexi district Party committee. As a national advanced manufacturing research and development base, Tianjin is focusing on core technology research and industrial implementation of embodied intelligence robots, cultivating a group of globally competitive industry leaders. PaXini Technology (Tianjin) Co is one such representative example. "The key to these logistics robots lies in our independently developed multidimensional tactile sensors," Lin Tong, director of PaXini' s data collection center, said. Currently, 80 percent of humanoid robots worldwide utilize PaXini's sensors. Tactile sensors, known as the cornerstone of the intelligent cognition and information interaction industry, have also been listed by China as one of the key critical chokepoint technologies alongside lithography machines and chips. "Five or six years ago, similar tactile sensor products cost as much as 100,000 yuan ($14,770) each, severely restricting the development of the entire robot industry," Nie Xiangru, co-founder of PaXini, recalled. The high import costs made tactile perception a luxury in the robotics field, making it difficult to be commercialized on a large scale. To break the monopoly, the PaXini team spent four to five years in R&D, successfully creating the world's first 6D hall array multidimensional tactile sensor, transforming core technology from a heavy reliance on imports to 100 percent domestic self-sufficiency. Today, PaXini's basic tactile sensor models are priced at only 199 yuan, just 0.2 percent of the price of equivalent products in overseas market. This has made tactile perception accessible from laboratories to various industries, turning a luxury into a basic hardware accessible to everyone. The key to reducing costs lies in significant optimizations in chips, structure and algorithms with each product generation, Nie said. "The advancement of software algorithms enables us to reduce our reliance on hardware. Coupled with the growth of the industry, when prices become cheaper, the order volume increases, and with more orders, the costs can be further reduced. Naturally, the prices spiral downward." PaXini's competitiveness lies not only in the independent R&D of core components, but also in its underlying data. Last year, PaXini's Super EID Factory, officially commenced operations in the Kongtian digital industrial park in Hexi district. It is currently the world's largest embodied intelligence data collection and model training base. "For robots to be deployed effectively, they require sufficient scenario-based data support," Nie said. The factory utilizes critical data from various vertical work scenarios to enable robots to learn how to work, thus enabling them to adapt to practical applications more quickly. As the world's largest EID collection and model training base, this factory's daily collection capacity is equivalent to 1.02 to 1.52 times that of an entire worker's career. The factory encompasses thousands of tasks across full-chain embodied intelligence application environments, including automotive manufacturing, households, offices, catering, supermarkets, healthcare and medical services, aiming to simulate the complex scenarios robots may encounter in the real world. The Super EID Factory will produce nearly 200 million pieces of high-quality and high-dimensional embodied intelligence training data annually. "This provides a revolutionary solution to the core problems faced by the current physical intelligence industry, such as the scarcity of data sets and the lack of tactile modal data," Lin said. Tianjin, as a policy and industrial hub, offers a favorable environment for cross-border data transactions. This is why PaXini chose to establish its factory in Tianjin. "Choosing Hexi district was not only for its central urban location, but also for its market-oriented business environment and full-chain industrial services," Lin added. The company was granted 12,000 square meters of usage area in Hexi district to create a "data intelligent manufacturing" scenario without noise or pollution. He added that as a free trade zone, Tianjin was the first to release enterprise data classification standards and data cleaning operation lists, forming a complete data policy system. Leveraging its diverse application scenarios and geographical advantages, Tianjin has become a core node for data collection and cross-border circulation. Starting from Tianjin, PaXini plans to further expand its data collection bases and factory scale, ensuring data is not only produced locally, but also fully utilized, aiming to promote the internationalization of China's data standards and serve the global intelligent industry development. In recent years, Tianjin has formed a complete robot industry chain from core components and complete machine manufacturing to system integration and application services. "In recent years, we have formed a relatively complete industrial ecosystem in the fields of industrial robots, specialized robots and service robots," said Zhai Lixin, vice-mayor of Tianjin. In 2025, there were 104 robot industry chain enterprises in Tianjin and the industrial output value was 13.5 billion yuan, an increase of 18.9 percent year-on-year, while operating income was 27.8 billion yuan, an increase of 16.3 percent year-on-year. This year, the Government Work Report proposed "creating a new form of intelligent economy", a novel economic form driven by AI while deeply empowering various industries through "AI+". "Tianjin has a solid industrial foundation in areas such as automobiles, electronic information and aerospace. This determines that the development of local robots must first focus on serving production and meeting the actual process requirements," Zhao Fengjiao, secretary-general of the Tianjin Robot Industry Association, said. Shiyun Technology (Tianjin) Co, a high-tech robot company specializing in special industries and high-risk operation scenarios, has achieved mass production and commercial deployment in various fields, including cultural and entertainment performances and industrial intelligent manufacturing. In medical scenarios, Shiyun's intelligent hospital robot guides can provide guidance with consultations, full-process accompaniment and emergency assistance for patients, making healthcare safer and more efficient, an employee at Shiyun said. This company has constructed a "body-cerebellum-brain" software and hardware full-stack technology layout, centered around a "one-body, three-intelligences" full-stack platform â using the embodied body as the hardware base and integrating interaction intelligence, motion intelligence and operational intelligence to achieve a complete closed loop from perception to action. "Shiyun's greatest breakthrough is its focus on embodied intelligence solutions," he said. The company is accumulating high-quality data assets in the industry and has begun constructing and deploying data collection factories nationwide, enabling continuous iteration of "operating while labeling and training", making robots become smarter with each task. "We will comprehensively establish R&D centers, production workshops and testing centers in Tianjin, building a full industry chain system integrating R&D, manufacturing, sales and services. This year, we will implement 10 standardized scenarios and expect to achieve mass product delivery by 2027," said Cao Keqian, chairman of Shiyun. According to the "Tianjin Action Plan for Promoting Innovation and Development in Artificial Intelligence (2025-27)", Tianjin will focus on the field of embodied intelligence in the future, promoting the research and application of underwater robots, industrial robots and special-purpose robots. "For each enterprise, we will adopt a customized approach for assistance, aiming to create a more competitive industrial ecosystem," Zhai said. Humanoids in factories share knowledge as they learn 2024 Sensors Summit nets $3.9 billion in deals Chinese scientists develop world's first human-like electronic skin with potential applications for
Images (10): 




|
|||||
| Nvidia Cosmos 3 targets AV and robotics training workloads | … | https://www.automotiveworld.com/news/nv… | 4 | Jun 12, 2026 00:01 | active | |
Nvidia Cosmos 3 targets AV and robotics training workloads | Automotive WorldURL: https://www.automotiveworld.com/news/nvidia-cosmos-3-targets-av-and-robotics-training-workloads/ Description: Nvidia opens Cosmos 3 to developers, betting that infrastructure pull-through matters more than model licensing revenue Content:
Don't have an account? Subscribe “Our goal is to help stakeholders understand the future of mobility.” Home › News › Nvidia Cosmos 3 targets AV and robotics training workloads Nvidia opens Cosmos 3 to developers, betting that infrastructure pull-through matters more than model licensing revenue Nvidia has launched Cosmos 3, an open world foundation model for physical AI built on a mixture-of-transformers architecture that combines vision reasoning, world simulation and action prediction in a single system. The model is designed to compress physical AI training and evaluation cycles from months to days, with direct application in autonomous vehicle (AV) development, robotics and vision AI. Cosmos 3 pairs a reasoning transformer with an expert generation transformer, enabling it to understand object interactions, motion and spatial-temporal relationships before generating video and action outputs. The model is trained on what Nvidia describes as one of the largest multimodal physical AI datasets, covering text, image, video, sound and action trajectories. The launch includes the Cosmos Coalition, a new collaboration with Agile Robots, Black Forest Labs, Generalist, LTX, Runway and Skild AI to advance open world models. Li Auto is among the AV developers building on the Cosmos platform, which now includes new datasets covering autonomous driving, robotics and spatial reasoning. In a statement, Jensen Huang, founder and Chief Executive of Nvidia, said: “The big bang of physical AI is just around the corner thanks to breakthroughs in multimodal reasoning language, vision and world models. The Cosmos 3 family of open, frontier omnimodels gives developers a generational leap in ability to build robots, autonomous vehicles and vision AI that perceive, reason, plan and act in the physical world.” Why this matters: • Cosmos 3 is the connective tissue beneath everything else NVIDIA announced this week. Alpamayo 2 Super, the AlpaGym training framework, OmniDreams scenario generation—each of those tools draws on Cosmos as its underlying world model foundation. Taken together, the GTC Taipei announcements read less like separate product launches and more like a vertically integrated physical AI stack. • The open release is a strategic land grab, not generosity. Making a frontier foundation model freely available compresses the timeline for developers to build on NVIDIA’s architecture rather than a competitor’s. The Cosmos Coalition, which brings in robotics firms, video generation labs and AI developers simultaneously, extends that logic: the more of the physical AI ecosystem that standardises on Cosmos, the harder it becomes to build credible alternatives at comparable scale. • The automotive application is substantial, but the broader claim is larger still. Cosmos 3 is positioned across robotics, AVs and industrial vision AI simultaneously. That breadth matters because it means AV developers training on Cosmos 3 are drawing on a dataset and architecture also being refined by robotics and warehouse applications. In effect, this means cross-domain training data at a scale no single-sector developer can likely replicate. Whether that translates into measurably better on-road performance remains to be demonstrated, but the architectural logic is sound. June 11, 2026 June 11, 2026 June 11, 2026 Let us help you understand the future of mobility "*" indicates required fields Δ June 1, 2026 Automotive World's global light vehicle sales forecast delivers a concise regional analysis of past sales trends and future market expectations. May 29, 2026 Automotive World examines Subaru’s recent market and production performance, offering detailed forecasts for vehicle output through to 2030. May 22, 2025 With data spanning nearly 60 vehicle groups, 140 brands, and 1,100 models, this database delivers extensive insight into vehicle manufacturing worldwide. Welcome back , to continue browsing the site, please click here
Images (4): 


|
|||||
| Hyundai Motor set to deepen robotics, AI partnership with Nvidia … | https://www.koreatimes.co.kr/business/c… | 2 | Jun 12, 2026 00:01 | active | |
Hyundai Motor set to deepen robotics, AI partnership with Nvidia - The Korea TimesDescription: Hyundai Motor Group is expected to expand its artificial intelligence (AI) and robotics partnership with Nvidia, as the heads of the two tech firms... Content:
Nvidia CEO Jensen Huang speaks during a press conference at Computex 2026 in Taipei, Tuesday. AFP-Yonhap Hyundai Motor Group is expected to expand its artificial intelligence (AI) and robotics partnership with Nvidia, as the heads of the two tech firms are highly likely to meet in Seoul later this week — a move that will strengthen growth momentum for the carmaker’s autonomous driving and humanoid robotics. The high-profile meeting would focus on deepening collaboration in the two key technology areas. Nvidia CEO Jensen Huang is scheduled to visit Seoul in the coming days. Boston Dynamics, the maker of the Atlas humanoid robot, is at the center of the anticipated collaboration. The company is a major robotics affiliate of Hyundai Motor Group. The carmaker has been advancing Atlas as an industrial-grade humanoid platform, as part of its efforts to become one of the world’s most aggressive manufacturing players in the emerging physical AI field, which combines AI with robots designed to operate in real-world environments. The two companies formalized their cooperation at the Asia-Pacific Economic Cooperation summit last year, when they announced a partnership to develop AI factory-based mobility solutions by integrating Nvidia’s AI infrastructure with Hyundai’s manufacturing and mobility ecosystem. Huang also expressed hope that Nvidia would play a larger role in advancing Korea’s robotics industry during the Korea Partner Night event at GTC Taipei 2026 on Monday, saying the company is willing to expand its investment in Korea. Nvidia CEO Jensen Huang, center, poses with Samsung Electronics Executive Chairman Lee Jae-yong, left, and Hyundai Motor Group Executive Chair Chung Euisun after having dinner at a chicken restaurant in Seoul, Oct. 30, 2025. Joint Press Corps Industry officials said the upcoming gathering between the two tech moguls will yield a deepening of that arrangement, particularly around Boston Dynamics’ efforts to deploy AI-powered robots in industrial settings. Nvidia has also aggressively pursued partnerships with automakers and robotics firms, as part of its push into physical AI. “The relationship between the two firms has been building steadily, and Jensen Huang’s Seoul visit could mark a pivotal moment in terms of concrete deliverables,” an official from the industry said. “Both firms have strong incentives to go deeper into autonomous driving and robotics.” Hyundai Motor Group could adopt Nvidia’s autonomous driving platform, Alpamayo, as the carmaker is rushing to close its lingering gap with its overseas rivals in self-driving technology. The group has lagged behind its rivals, such as Tesla and Chinese carmakers, in rolling out commercially viable autonomous systems. The possible partnership with Nvidia’s AI-based autonomous driving platform could offer a shortcut to catching up. Huang's Korea visit comes amid a broader tour of Asia, during which the chip giant's chief has met with top executives from leading technology companies. Korea, home to major semiconductor and electronics players, has recently become a more crucial partner for Nvidia, as demand for AI computing infrastructure across the globe continues to surge. Hyundai Motor Group declined to confirm specific agendas for the upcoming meeting between Chung and Huang.
Images (2): 

|
|||||
| NEURA Robotics raises up to $1.4B in record robotics round … | https://thenextweb.com/news/neura-robot… | 8 | Jun 12, 2026 00:01 | active | |
NEURA Robotics raises up to $1.4B in record robotics round backed by Nvidia, Amazon, and TetherURL: https://thenextweb.com/news/neura-robotics-1-4b-series-c-physical-ai Description: German robotics firm NEURA raised up to $1.4B at a $7B valuation from Nvidia, Amazon, Tether, Qualcomm, and Bosch to scale cognitive robots to millions by 2030. Content:
The German company plans to mass-produce millions of cognitive robots by 2030 and build real-world AI training gyms worldwide NEURA Robotics raised up to $1.4B at a ~$7B valuation. Backed by Nvidia, Amazon, Tether, Bosch, and Qualcomm. Plans millions of robots by 2030. German robotics company NEURA Robotics has announced up to $1.4 billion in Series C funding to scale its cognitive robotics platform. The round values the company at approximately $7 billion, according to Bloomberg. NEURA says it is the largest funding round ever raised by a full-stack robotics company. The investor list spans crypto, chips, cloud, and industrial manufacturing. Tether led the round, with participation from Qualcomm Technologies, Amazon, Nvidia, Bosch, Schaeffler, the European Investment Bank, imec.xpand, Lingotto Horizon, and InterAlpen Partners. That breadth signals how many different sectors see cognitive robotics as a near-term commercial opportunity. NEURA plans to use the capital to ramp mass production to millions of robots by 2030. It will also accelerate the global rollout of NEURA Gyms, which the company describes as the world’s first real-world training environments for cognitive robots and physical AI. The order backlog and strategic deployment pipeline already exceed $1 billion. TNW City Coworking space - Where your best work happens A workspace designed for growth, collaboration, and endless networking opportunities in the heart of tech. The company’s pitch is that it has built a full-stack platform, called Neuraverse, that combines robotics, AI, sensors, edge computing, and large-scale learning infrastructure into a unified architecture. Unlike traditional industrial automation, which relies on isolated machines programmed for single tasks, NEURA’s robots are designed to learn, collaborate, and operate across environments on a shared intelligent platform. “The future of AI won’t simply take place on screens,” said David Reger, founder and CEO. “It will move, interact, learn, and work alongside us in the real world.” He called physical AI and cognitive robotics “one of the biggest technological leaps of the coming decades.” The round comes as Europe positions itself as a serious contender in the humanoid robotics race. Siemens and Nvidia have deployed humanoid robots in German factories. BMW has brought humanoid robots into its manufacturing lines. And startups like Encord are building the data infrastructure layer for physical AI. NEURA’s strategic partners, including Bosch, Schaeffler, Kawasaki, Qualcomm, Amazon, and Nvidia, position it at the intersection of industrial automation and AI. The Bosch and Schaeffler involvement is particularly notable. Both are tier-one automotive and industrial suppliers, suggesting that NEURA’s robots are being evaluated for deployment in existing manufacturing ecosystems rather than experimental labs. The Tether investment adds an unusual dimension. The stablecoin issuer has been diversifying aggressively into AI and infrastructure. NEURA mentioned advancing “decentralised AI architectures” and “machine-native economic systems” among its goals, hinting at a future where robots transact autonomously. Whether that materialises or stays marketing language, the $1.4 billion is real, and so is the race to build the platform that physical AI runs on. I am the Editor in Chief for TNW, covering technology not as a parade of launches and valuations, but as a system of influence, persuasion, (show all) I am the Editor in Chief for TNW, covering technology not as a parade of launches and valuations, but as a system of influence, persuasion, and change. I write about startups, venture capital, digital policy, and Europe ecosystem, with an eye on the larger story beneath them: who gets to build the future, who profits from it, and how Europe is learning to speak in a louder voice of its own. Before moving into senior editorial leadership, I've built my career for over +10 years across journalism, storytelling, content strategy, SEO, and digital publishing, with experience in SaaS, hospitality, art, and culture. Get the most important tech news in your inbox each week. The heart of tech A Tekpon Company Copyright © 2006—2026, Cogneve, INC. Made with <3 in Amsterdam.
Images (8): 


|
|||||
| Korea's robotics alliance with Nvidia boosts major tech firms - … | https://www.koreatimes.co.kr/business/c… | 2 | Jun 12, 2026 00:01 | active | |
Korea's robotics alliance with Nvidia boosts major tech firms - The Korea TimesDescription: Shares of Korea's major robotics business operators are sharply increasing, driven by mounting anticipation over Nvidia CEO Jensen Huang's planned... Content:
Nvidia CEO Jensen Huang delivers a speech during the COMPUTEX 2026 exhibition in Taipei, Taiwan, Tuesday. AP-Yonhap Shares of Korea's major robotics business operators are sharply increasing, driven by mounting anticipation over Nvidia CEO Jensen Huang's planned Seoul visit and his repeated signals of interest in deepening collaboration with the local robotics players. On Monday, the Nvidia chief expressed optimism for possible investment in Korea’s robotics sector during the Korea Partner Night event at GTC Taipei 2026. The remarks have resonated strongly with investors ahead of his scheduled visit to Seoul, slated for Thursday. His well-documented enthusiasm for physical artificial intelligence (AI) — the integration of machine intelligence and real-world robotic systems — has also helped frame Korean industrial heavyweights as potential frontline beneficiaries of the next wave of AI-driven automation. Large-cap robotics stocks, such as LG Electronics, Hyundai Motor and Doosan Robotics, are also on a sharp rally on the growing expectation of the robotics industry. LG Electronics is the standout performer, with its shares soaring more than 300 percent this year. The stock closed at 392,500 won on Tuesday, the last trading day before the local election holiday, up from 91,400 won on the first trading day of the year. The company is accelerating its push into robotics through its logistics robot — CLOi CarryBot — and recently shared its plan to develop a physical AI model based on Nvidia’s GR00T humanoid reasoning platform. Hyundai Motor Group is another key beneficiary of the booming robotics industry. Shares of Hyundai Motor rose by more than 140 percent during the same period, with that of Kia increasing around 40 percent, buoyed by increasing investors’ attention on the Atlas humanoid robot. The carmaker plans to deploy the robots — developed by its robotics subsidiary Boston Dynamics — into its major manufacturing facilities here and abroad. Madison Huang, left, senior director of product marketing at Nvidia, speaks with Doosan Robotics CEO Kim Min-pyo, right, at Doosan Robotics Innovation Center in Seongnam, Gyeonggi Province, April 29, 2025. Courtesy of Doosan Robotics Doosan Robotics also reported growth in its shares of more than 100 percent. The industrial robot maker is making efforts to expand its scope of business into AI-powered humanoid robots. Last year, Doosan Group agreed to forge a physical AI partnership with Nvidia into the group’s broad business areas, such as construction equipment, power generation equipment and robotics. In April, Madison Huang, the eldest daughter of the Nvidia CEO and a senior director of product marketing at the company, visited a research facility of Doosan Robotics in Seongnam, Gyeonggi Province. This raises expectations that the Nvidia chief may hold high-profile business meetings with top executives from Doosan Robotics during his visit. The Doosan affiliate is scheduled to launch its first industrial humanoid robot in 2028 by using Nvidia’s AI infrastructure. “The rise of physical AI is reframing the position of Korean conglomerates from legacy manufacturing players to strong contenders in the emerging robotics industry,” an industry official said. “Huang’s Seoul visit will underpin the momentum and help Korean tech firms speed up their expansion into the lucrative AI-driven robotics sector.”
Images (2): 

|
|||||
| 焦點股》佳能:Agility打入豐田 有望受惠 - 自由財經 | https://ec.ltn.com.tw/article/breakingn… | 7 | Jun 11, 2026 16:00 | active | |
焦點股》佳能:Agility打入豐田 有望受惠 - 自由財經URL: https://ec.ltn.com.tw/article/breakingnews/5349473 Description: 〔記者歐宇祥/台北報導〕美國人形機器人公司Agility Robotics宣布與豐田(Toyota)加拿大製造子公司(TMMC)已正式簽約,導入Digit人形機器人,光學廠佳能(2374)也有望 Content:
新聞查詢 基金查詢 佳能交投熱。圖為美國人形機器人公司Agility Robotics共同創辦人Jonathan Hurst(中央者)到訪佳能。(資料照) 〔記者歐宇祥/台北報導〕美國人形機器人公司Agility Robotics宣布與豐田(Toyota)加拿大製造子公司(TMMC)已正式簽約,導入Digit人形機器人,光學廠佳能(2374)也有望受惠。今日佳能股價交投熱絡,雖然早盤一度翻黑,不過隨即資金湧入攻高,最高漲約3.5%,近11時10分,佳能股價上漲1.4元或1.73%,暫報82.1元,成交量近6200張。 佳能指出,豐田子公司已正式簽約導入Digit人形機器人,將在加國工廠進行物流搬運等自動化作業,此合作採用機器人即服務(RaaS)模式,標誌著人形機器人進入傳統汽車產線。而佳能作為Agility Robotics的投資者,營運也有望受惠。 請繼續往下閱讀... 昨日外資買超佳能1842張,由連7賣轉買,自營商買超645張,三大法人合計買超2487張;昨日當沖成交量為1846張、佔比27%。 一手掌握經濟脈動 點我訂閱自由財經Youtube頻道 不用抽 不用搶 現在用APP看新聞 保證天天中獎 點我下載APP 按我看活動辦法 相關新聞 基金查詢more 熱門新訊more 注目新聞 自由時報版權所有不得轉載 © 2026 The Liberty Times. All Rights Reserved.
Images (7): 
|
|||||
| На заводе Toyota в Канаде начнут работать 7 человекоподобных роботов … | https://habr.com/ru/companies/bothub/ne… | 0 | Jun 11, 2026 16:00 | active | |
На заводе Toyota в Канаде начнут работать 7 человекоподобных роботов DigitURL: https://habr.com/ru/companies/bothub/news/1004180/ Description: После годичного пилотного проекта канадское производственное подразделение Toyota заклю... Content: |
|||||
| New humanoid robot brings human-like dexterity for industrial roles | https://interestingengineering.com/ai-r… | 10 | Jun 11, 2026 00:00 | active | |
New humanoid robot brings human-like dexterity for industrial rolesURL: https://interestingengineering.com/ai-robotics/vietnam-vr-h3-humanoid-robot-industrial-grade Description: VinRobotics unveils VR-H3, a humanoid robot built for industrial automation, material handling, and assembly tasks. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Discover the engineering revolution transforming modern defense with Strength, Stealth, Speed: The Very Fast Future of Advanced Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Future of Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. VR-H3 can interact with people, transport objects, and lift 13–17 pounds while performing assembly tasks. A Vietnamese technology company has unveiled its latest humanoid robot, the VR-H3, at the IEEE International Conference on Robotics and Automation (ICRA 2026) in Vienna and COMPUTEX Taipei 2026. Developed by VinRobotics, a subsidiary of conglomerate Vingroup, the third-generation humanoid robot is designed for industrial and operational applications, combining advanced mobility, perception, and manipulation capabilities. Equipped with more than 31 actuators and dual onboard edge computers, the VR-H3 can navigate complex environments, interact with people, lift payloads, transport materials, and perform assembly tasks in real-world settings. Recently, VinDynamics, another subsidiary of Vingroup, introduced its first humanoid robot, Dyno, marking the country’s entry into the global humanoid robotics arena. The VR-H3 is VinRobotics’ third-generation humanoid robot, developed for industrial automation, material handling, and operational support in complex working environments. The robot is equipped with more than 31 actuators that provide coordinated whole-body movement, enabling it to perform tasks requiring dexterity, balance, and precision. Powered by two onboard edge computers, VR-H3 processes sensory and operational data locally, supporting low-latency decision-making and real-time autonomous control. The humanoid is capable of environmental perception, human interaction, object transportation, and payload handling of up to 13 to 17 pounds (6–8 kilograms), and assembly-related operations. Its integrated sensing and control systems allow it to navigate dynamic environments while maintaining stable performance during manipulation tasks, according to statement from the firm. According to the company, all key technologies were developed entirely in-house, including the robot’s mechanical architecture, real-time computing and communication infrastructure, electrical and electronic (E/E) architecture, power distribution platform, battery management system, and full-body AI control framework. This vertically integrated development approach gives VinRobotics full control over both hardware and software optimization. At ICRA 2026, the company demonstrated VR-H3’s advanced teleoperation capabilities using motion-capture technology integrated directly into a virtual reality headset. The system enabled operators to remotely control the humanoid’s movements in real time without requiring additional external tracking equipment, highlighting its potential for remote industrial operations, hazardous environments, and human-robot collaboration applications. Recently, another subsidiary of the group, VinDynamics, unveiled Dyno, its first humanoid robot, marking a significant step in the country’s growing robotics ambitions. Dyno combines advanced AI, environmental perception, and dexterous manipulation capabilities in a single humanoid system. Equipped with a sophisticated sensor suite and AI platform, the robot is designed to navigate complex environments autonomously, interact naturally with people, and perform tasks requiring situational awareness and precise object handling. According to the company, Dyno is being developed for security and surveillance operations across urban areas, campuses, and commercial facilities, while also serving as a household assistant capable of supporting everyday activities. Its flexible arm architecture and advanced manipulation system enable it to interact with objects and operate effectively in dynamic real-world settings. A live demonstration at both events highlighted Dyno’s capabilities as an autonomous robotic guide, a role previously tested at Vinpearl Safari Phu Quoc. During pilot deployments, the robot used multilingual speech, natural language interaction, and real-time environmental awareness to engage visitors and answer questions. Alongside Dyno, VinDynamics showcased key enabling technologies, including the VDM 80 high-performance actuator, a human-like robotic hand with 11 joints and integrated force sensors, and an AI training dataset designed to accelerate humanoid learning and real-world performance. Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Images (10): |
|||||
| NVIDIA unveils palm-sized $249 AI computer for robotics By Investing.com | https://www.investing.com/news/stock-ma… | 0 | Jun 10, 2026 08:00 | active | |
NVIDIA unveils palm-sized $249 AI computer for robotics By Investing.comDescription: NVIDIA unveils palm-sized $249 AI computer for robotics Content: |
|||||
| Pudu unveils new semi-humanoid robot capable of continuous learning | https://interestingengineering.com/ai-r… | 10 | Jun 10, 2026 00:01 | active | |
Pudu unveils new semi-humanoid robot capable of continuous learningURL: https://interestingengineering.com/ai-robotics/china-pudu-learning-semi-humanoid-robot Description: Chinese frim Pudu unveils the D7, an AI-powered semi-humanoid robot that learns, adapts, and boosts industrial automation. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Discover the engineering revolution transforming modern defense with Strength, Stealth, Speed: The Very Fast Future of Advanced Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Future of Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. The robot handles picking, transport and replenishment, lifting 20 lbs and reaching shelves up to 6.5 feet high. Chinese robotics firm Pudu has unveiled a next-generation industrial semi-humanoid robot designed for manufacturing and factory environments. The D7 robot combines industrial-grade hardware with embodied AI, powered by the company’s PuduFM 1.0 foundation model. Unlike conventional industrial robots that follow fixed programs and predefined workflows, the PUDU D7 can understand tasks, learn from experience, and adapt its actions in real-world settings. The Shenzhen-based company says the platform is designed to improve factory automation by enabling intelligent decision-making, continuous learning, and greater operational flexibility across a wide range of industrial applications. In 2024, Pudu unveiled Pudu D7, its first semi-humanoid robot, combining an omnidirectional chassis, robotic arms, and a human-like upper body. D7 is a semi-humanoid robot designed to evolve through real-world experience rather than relying solely on pre-programmed capabilities. At the core of the system is an end-to-end data collection architecture that captures and processes operational data across a wide range of industrial workflows. Through low-latency transmission and synchronized data processing, the platform creates a continuous feedback loop that supports ongoing model training and performance optimization. Powered by the PuduFM 1.0 AI foundation model, the robot learns from real-world operations, gradually improving its understanding of industrial procedures, spatial relationships, and manufacturing processes. Unlike traditional robots whose capabilities remain fixed after deployment, D7 continuously enhances its performance through every task it performs. According to a statement by the firm, D7 is designed to improve efficiency in warehouses, factories, and logistics environments. Equipped with dual robotic arms, the robot can autonomously perform tasks such as material handling, shelf picking, inventory replenishment, and internal transportation. It supports payloads of up to 30 pounds (14 kilograms) and can operate at heights of up to 6.5 feet (2 meters), allowing it to interact effectively with high-rack storage systems. Its force-control technology enables careful handling of both heavy and delicate items, reducing the risk of damage during transport. The robot can also push carts and move materials across facilities. By integrating navigation, approach planning, grasping, and manipulation into a unified action framework, PUDU D7 eliminates the traditional separation between movement and operation, enabling more efficient execution of complex, multi-step tasks. For applications requiring fine control, such as assembly, dispensing, and precision handling, D7 incorporates advanced tactile sensors that provide real-time force and pressure feedback. The system delivers millimeter-level force-control accuracy, automatically adjusting applied force according to task requirements and material characteristics. This enables stable, consistent operation while minimizing the risk of component damage. To operate safely in dynamic industrial settings, the robot is equipped with dual front-and-rear LiDAR systems and a comprehensive perception suite. These technologies allow it to continuously monitor its surroundings, detect obstacles, adapt to route changes, and navigate safely through busy factory environments with minimal infrastructure modifications. PUDU D7 supports fully autonomous battery swapping, allowing it to independently replace and recharge batteries without human intervention. This capability minimizes downtime and enables continuous 24/7 operation, improving equipment utilization and productivity. According to the firm, looking ahead, PuduAgent, its embodied AI agent platform, extends this vision by enabling robots to interpret user goals, break down complex workflows, coordinate navigation and manipulation tasks, and collaborate with multiple robots across different locations. Together, these technologies represent a shift from task-based automation toward autonomous systems capable of decision-making, long-term planning, and intelligent collaboration in industrial environments Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Images (10): |
|||||
| humanoid robots by Frreiheit (Nils) :: Kicktraq | http://www.kicktraq.com/projects/frreih… | 8 | Jun 08, 2026 08:00 | active | |
humanoid robots by Frreiheit (Nils) :: KicktraqURL: http://www.kicktraq.com/projects/frreiheit/humanoid-robots/ Description: This project serves this purpose to look behind the hype of humanoid robots to check out what they really can do nowadays. Content: Images (8): 

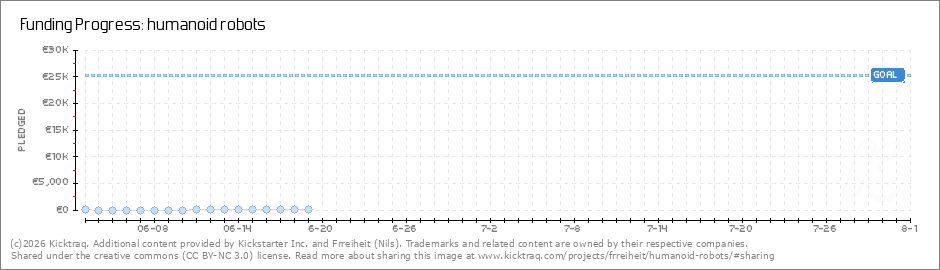
|
|||||
| Yango's Sergej Loiter on how AI is creating smarter experiences … | https://gulfbusiness.com/yango-exec-say… | 0 | Jun 07, 2026 08:00 | active | |
Yango's Sergej Loiter on how AI is creating smarter experiences for communities, businessesURL: https://gulfbusiness.com/yango-exec-says-ai-offers-smarter-experiences/ Description: We look at how Yango Group is using AI to power the human-like assistant, last-mile delivery, and smarter advertising Content: |
|||||
| Hashtag Trending Mar.1- HP debacle; Humanoid robots closer to hitting … | https://www.itworldcanada.com/article/h… | 0 | Jun 07, 2026 08:00 | active | |
Hashtag Trending Mar.1- HP debacle; Humanoid robots closer to hitting our workplaces; Apple blew $10 billion on the electric car before pulling the plugDescription: If rumours are true and this one should be, I started it, we have a special edition of the Weekend show where we talk about the evolution of the role of the CIO... Content: |
|||||
| Tux Machines — Devices, Open Hardware, and Mobile With Linux | https://news.tuxmachines.org/n/2026/05/… | 1 | Jun 07, 2026 08:00 | active | |
Tux Machines — Devices, Open Hardware, and Mobile With LinuxURL: https://news.tuxmachines.org/n/2026/05/31/Devices_Open_Hardware_and_Mobile_With_Linux.shtml Content:
Do you waddle the waddle? Armbian Imager is the official flashing utility for Armbian Linux, a production-ready Debian and Ubuntu-based system with patched kernels for ARM single-board computers. Armbian Imager supports over 300 Armbian-supported single-board computers organized by manufacturer. Shelly 2.3.2.2 is here to improve support for the Arch Linux-based CachyOS distribution by bringing the CachyOS updater path to feature parity and implementing a command that lets you downgrade packages from the CachyOS repositories. Shelly now automatically detects the repository of choice. The Star Labs Firmware 26.06 is here to add support for AMD Cezanne-based systems, including the Byte Mk I mini PC and StarBook Mk VI laptop, improve battery-free operation and auto-rotation on StarLite Mk V laptops running Ubuntu, and fix blue sleep LED breathing on the StarBook MkVIr2-Intel laptop. Coming a little over two weeks after Ardour 9.5, the Ardour 9.7 release introduces an optional vertical summary to complement the newly revamped horizontal summary pane, implements natural sort order around the user interface, integrates the MIDI Tools sidebar into the Editor, and improves listing of control surfaces. We already knew that Ubuntu 26.10 would ship with the latest GNOME and Linux kernel; in this case, Canonical confirmed that the Stonking Stingray features the upcoming GNOME 51 desktop environment by default and the Linux 7.2 kernel series, as I predicted a few months ago. GNOME 50.2 comes almost two months after GNOME 50.1 to implement rate control parameters to the VA-API H.264 screencast pipelines so that the encoder won’t use its default bitrate, and add support for opening the session and accessibility menus on the login screen using either left or right mouse buttons. Coming five weeks after LibreOffice 26.2.3, the LibreOffice 26.2.4 release brings more bug fixes to address various issues, crashes, and other annoyances reported by users, as well as stability improvements contributed by LibreOffice’s global community of developers, QA engineers, and ecosystem companies. The Sparrow Hawk from Retronix Technology is a single-board computer built around the Renesas R-Car V4H processor. Originally developed for automotive applications, the R-Car V4H combines Arm Cortex-A76 and Cortex-R52 CPU cores with integrated graphics and AI acceleration. Retronix cites robotics, smart manufacturing, computer vision, and industrial edge systems as example use cases. Radxa has announced two upcoming NAS systems, the DragonStation and DragonBay. Powered by a Qualcomm Snapdragon platform and shipping with Fygo OS pre-installed, the systems combine high-speed storage, multi-gigabit networking, media management, and private cloud functionality in aluminum enclosures. posted by Roy Schestowitz on May 31, 2026 You would think a guitar amplifier would be a straightforward piece of analog electronics. But, of course, these days, everything has firmware, including [mforney]’s Yamaha THR10c. The service manual showed both a UART and JTAG header on the schematic, so as many of us would, he took that as a challenge. Along with layer lines, FDM printers are notorious for being neither air- nor water-tight due to the countless very small gaps between the layers. This is very unfortunate if you are trying to FDM print something that should keep water either inside or outside. Although a variety of potential solutions exist, it’s hard to easily compare them. Correspondingly [Half-Baked-Research] decided that the best approach here was to just try everything and pit them against each other. The value of a mirror is in its clarity. If the reflection is cast by [danicakostic17]’s Uncooperative Mirror though, you’ll find anything but. It’s described as a useless machine, because it appears as a tiled mirror. As you approach it though, the tiles shake around and make it very difficult to follow what’s in front of you. It’s an art piece and a prank all in one, and we like it. The device is a Compute Module 5 smartphone sized computer with a 3.92″ OLED touch display and the ubiquitous BlackBerry-derived keyboard. It’s drawn together with a PCB that holds all components and peripherals, and this and the 5000 mAH battery fit in a 3D printed shell that gives it the form factor of a chunky smartphone. You can see it at the link above, and also find it in a GitHub repository. Last Friday I went to the toy store with my boy, and while he was rummaging through the Spider-Man section, my eyes caught sight of a section with very low-cost toy robots. As I'm playing with agents, LLMs, speech-to-text, and text-to-speech, I thought: why not buy myself one of these low-cost robots, take it apart, and turn it into a fun little LLM-powered toy for my kid and possibly the other kids in the hood? I already had an RTX 4080. 16GB of VRAM. Good enough for gaming, not good enough for the models I wanted to run locally. The next step up in GPU land is either spend a fortune on a card with more VRAM, or find another way. I found another way. I bought a datacenter GPU that doesn’t even have a normal PCIe connector, stuck it in my gaming PC with an adapter, and now I have 32GB of VRAM across two GPUs running a 27 billion parameter model at 32 tokens per second. The whole thing cost me £200. If you spend a lot of time working in the Terminal, you undoubtedly have your favorite CLI (command line interface) and TUI (terminal or text-based user interface) apps. One of mine is a TUI app called cmus. Cmus has a text-based user interface with minimal graphics and customization options. It's also one of the best music players I've ever used, with easy organization (in conjunction with another method I use) and simple playback. I've been spending considerable time with Termux on both of my Android phones and came up with a bright idea: getting my favorite TUI apps to work on both of my Android phones.
Images (1): |
|||||
| Siemens unterstützt Ubtech bei der Massenproduktion humanoider Roboter | https://www.elektronikpraxis.de/siemens… | 10 | Jun 06, 2026 08:00 | active | |
Siemens unterstützt Ubtech bei der Massenproduktion humanoider RoboterDescription: Der chinesische Robotik-Spezialist Ubtech und Siemens Digital Industries Software haben eine strategische Partnerschaft geschlossen. Das gemeinsame Ziel: Die Skalierung der Fertigung auf ein industrielles Niveau von bis zu 10.000 Einheiten pro Jahr. Content:
Anbieter zum Thema Der chinesische Robotik-Spezialist Ubtech und Siemens Digital Industries Software haben eine strategische Partnerschaft geschlossen. Das gemeinsame Ziel: Die Skalierung der Fertigung auf ein industrielles Niveau von bis zu 10.000 Einheiten pro Jahr. Die in Shenzhen unterzeichnete Vereinbarung markiert einen Wendepunkt in der noch jungen Branche der humanoiden Robotik. Weg von der reinen Technologieverifikation, hin zur kosteneffizienten Massenproduktion. Ubtech hat ambitionierte Ziele: Bis zum Jahr 2026 soll eine jährliche Produktionskapazität von 10.000 industriellen humanoiden Robotern erreicht werden, um der rasant steigenden Marktnachfrage gerecht zu werden. Um diese massiven Stückzahlen in der geforderten industriellen Qualität für den 24/7-Betrieb zu realisieren, holt sich Ubtech das Automatisierungs- und Digitalisierungs-Wissen von Siemens ins Haus. Im Zentrum der Kooperation steht die Implementierung eines durchgängigen „digitalen Fadens“. Mit Hilfe der PLM- und Fertigungssoftware von Siemens soll der gesamte Wertschöpfungsprozess, von der Forschung und Entwicklung über die mechanische Konstruktion bis hin zur Endmontage, digitalisiert und als digitaler Zwilling abgebildet werden. Dies ermöglicht Ubtech deutlich kürzere Iterationszyklen beim Hardware-Design und eine fehlerfreie Überführung neuer Robotermodelle in die physische Serienfertigung. Flankierend unterstützt Siemens das Unternehmen beim Aufbau einer ganzheitlichen digitalen Transformationsstrategie. Dass Siemens nicht nur als Ausrüster, sondern auch als Anwender und Software-Lieferant für die Robotik-Plattformen selbst agiert, zeigt ein Blick nach Franken. Anfang des Jahres der Ubtech-Partnerschaft vermeldete Siemens den erfolgreichen Abschluss eines Pilotprojekts im eigenen Elektronikwerk in Erlangen. Dort bewältigte der radgetriebene humanoide Roboter „HMND 01“ des britischen Start-ups Humanoid über zwei Wochen hinweg eigenständig komplexe Intralogistikaufgaben im Schichtbetrieb (u. a. 60 Behälterbewegungen pro Stunde). Das Besondere daran: Der Roboter navigierte nicht mit proprietärer Start-up-Software, sondern nutzte die Siemens-eigene Navigationssoftware SIMOVE ANS+. Mittels LiDAR-basierter SLAM-Technologie (Simultaneous Localization and Mapping) bewegte sich der Humanoide völlig autonom und sicher im Verbund mit über 30 weiteren, klassischen fahrerlosen Transportsystemen (FTS/AMR) über den Hallenboden. (mc) Bitte geben Sie eine gültige E-Mailadresse ein. Mit Klick auf „Newsletter abonnieren“ erkläre ich mich mit der Verarbeitung und Nutzung meiner Daten gemäß Einwilligungserklärung (bitte aufklappen für Details) einverstanden und akzeptiere die Nutzungsbedingungen. Weitere Informationen finde ich in unserer Datenschutzerklärung. Die Einwilligungserklärung bezieht sich u. a. auf die Zusendung von redaktionellen Newslettern per E-Mail und auf den Datenabgleich zu Marketingzwecken mit ausgewählten Werbepartnern (z. B. LinkedIn, Google, Meta). Stand: 08.12.2025 Es ist für uns eine Selbstverständlichkeit, dass wir verantwortungsvoll mit Ihren personenbezogenen Daten umgehen. Sofern wir personenbezogene Daten von Ihnen erheben, verarbeiten wir diese unter Beachtung der geltenden Datenschutzvorschriften. Detaillierte Informationen finden Sie in unserer Datenschutzerklärung. Ich bin damit einverstanden, dass die Vogel Communications Group GmbH & Co. KG, Max-Planckstr. 7-9, 97082 Würzburg einschließlich aller mit ihr im Sinne der §§ 15 ff. AktG verbundenen Unternehmen (im weiteren: Vogel Communications Group) meine E-Mail-Adresse für die Zusendung von redaktionellen Newslettern nutzt. Auflistungen der jeweils zugehörigen Unternehmen können hier abgerufen werden. Der Newsletterinhalt erstreckt sich dabei auf Produkte und Dienstleistungen aller zuvor genannten Unternehmen, darunter beispielsweise Fachzeitschriften und Fachbücher, Veranstaltungen und Messen sowie veranstaltungsbezogene Produkte und Dienstleistungen, Print- und Digital-Mediaangebote und Services wie weitere (redaktionelle) Newsletter, Gewinnspiele, Lead-Kampagnen, Marktforschung im Online- und Offline-Bereich, fachspezifische Webportale und E-Learning-Angebote. Wenn auch meine persönliche Telefonnummer erhoben wurde, darf diese für die Unterbreitung von Angeboten der vorgenannten Produkte und Dienstleistungen der vorgenannten Unternehmen und Marktforschung genutzt werden. Meine Einwilligung umfasst zudem die Verarbeitung meiner E-Mail-Adresse und Telefonnummer für den Datenabgleich zu Marketingzwecken mit ausgewählten Werbepartnern wie z.B. LinkedIN, Google und Meta. Hierfür darf die Vogel Communications Group die genannten Daten gehasht an Werbepartner übermitteln, die diese Daten dann nutzen, um feststellen zu können, ob ich ebenfalls Mitglied auf den besagten Werbepartnerportalen bin. Die Vogel Communications Group nutzt diese Funktion zu Zwecken des Retargeting (Upselling, Crossselling und Kundenbindung), der Generierung von sog. Lookalike Audiences zur Neukundengewinnung und als Ausschlussgrundlage für laufende Werbekampagnen. Weitere Informationen kann ich dem Abschnitt „Datenabgleich zu Marketingzwecken“ in der Datenschutzerklärung entnehmen. Falls ich im Internet auf Portalen der Vogel Communications Group einschließlich deren mit ihr im Sinne der §§ 15 ff. AktG verbundenen Unternehmen geschützte Inhalte abrufe, muss ich mich mit weiteren Daten für den Zugang zu diesen Inhalten registrieren. Im Gegenzug für diesen gebührenlosen Zugang zu redaktionellen Inhalten dürfen meine Daten im Sinne dieser Einwilligung für die hier genannten Zwecke verwendet werden. Dies gilt nicht für den Datenabgleich zu Marketingzwecken. Mir ist bewusst, dass ich diese Einwilligung jederzeit für die Zukunft widerrufen kann. Durch meinen Widerruf wird die Rechtmäßigkeit der aufgrund meiner Einwilligung bis zum Widerruf erfolgten Verarbeitung nicht berührt. Um meinen Widerruf zu erklären, kann ich als eine Möglichkeit das unter https://contact.vogel.de abrufbare Kontaktformular nutzen. Sofern ich einzelne von mir abonnierte Newsletter nicht mehr erhalten möchte, kann ich darüber hinaus auch den am Ende eines Newsletters eingebundenen Abmeldelink anklicken. Weitere Informationen zu meinem Widerrufsrecht und dessen Ausübung sowie zu den Folgen meines Widerrufs finde ich in der Datenschutzerklärung, Abschnitt Redaktionelle Newsletter. Weiterführende Inhalte Automatisierung mit Menschenform Humanoide Roboter sollen Nvidias GB300-Server in den USA montieren Humanoide Robotik Ist die Partystimmung gerechtfertigt? Hört auf zu tanzen, liebe Roboter! Cookie-Manager Leserservice AGB Hilfe Abo-Kündigung Werbekunden-Center Mediadaten Datenschutz Barrierefreiheit Impressum Abo KI-Leitlinien Autoren Copyright © 2026 Vogel Communications Group Diese Webseite ist eine Marke von Vogel Communications Group. Eine Übersicht von allen Produkten und Leistungen finden Sie unter www.vogel.de
Images (10): 
|
|||||
| UBTech Robotics hiring one AI scientist, ready to pay whopping … | https://www.indiatoday.in/technology/ne… | 10 | Jun 06, 2026 08:00 | active | |
UBTech Robotics hiring one AI scientist, ready to pay whopping Rs 142 crore salary - India TodayDescription: UBTech Robotics makes a landmark move to attract leading AI experts with unprecedented pay Content:
The competition to build smarter humanoid robots is getting serious, and companies are now going to extreme lengths to hire the right talent. In a surprising move, UBTech Robotics has announced a job opening that comes with a jaw-dropping salary, one that could earn about 124 million yuan (roughly Rs 142 crore) a year, according to Bloomberg. The Shenzhen-based company is looking for a chief AI scientist who can lead its next phase of innovation. While high salaries are not new in the tech world, such a massive package is still rare, especially in China’s AI industry, where companies usually avoid offering such big payouts. This is not just another senior position. UBTech wants someone who can guide the future of its humanoid robots and build the foundation for what it calls “embodied intelligence," a technology that allows machines to better understand and interact with the physical world. The person selected will take charge of developing advanced AI models and setting the long-term direction for the company’s robotics efforts. At the same time, UBTech is also planning to hire dozens of engineers, showing that it is expanding aggressively. The robotics space in China is seeing a wave of interest in 2026. From global tech showcases to large public events, humanoid robots are getting more attention than ever before. This growing spotlight is also bringing in investor confidence. Chinese AI companies like Minimax Group and Zhipu have recently made strong entries into the public market, which has further boosted trust in the country’s AI ecosystem. The government is also pushing this sector forward. Chinese Premier Li Qiang has already pointed to robotics as a key area for future development, suggesting this industry will receive strong support. UBTech itself has been growing at a fast pace. The company saw its overall revenue jump by more than 50 percent last year. Interestingly, the performance of its humanoid robot business is also good, where earnings from products and services increased more than 20 times. Its robots are slowly moving from labs to real-world environments. Earlier this year, Airbus SE bought its Walker S2 humanoid robots for use in aircraft manufacturing. While details were not shared, the deal shows that industries are beginning to test such machines in practical settings. UBTech is not alone in chasing this opportunity. Companies like Tesla are also working on similar robots, especially for factory use. The goal is reportedly to build machines that can handle repetitive or complex tasks alongside humans. Additionally, Amazon is also spending heavily (about Rs 4,000 crore) on building a new robotics fulfilment centre in places like Australia with a capacity of processing over 125 million packages per year, something which the brand recently confirmed in an official release.- EndsPublished By: Ankita GargPublished On: Apr 6, 2026 11:08 IST
Images (10): 



|
|||||
| China's Walker humanoid robot amazes with precise ballet performance | https://interestingengineering.com/ai-r… | 10 | Jun 06, 2026 08:00 | active | |
China's Walker humanoid robot amazes with precise ballet performanceURL: https://interestingengineering.com/ai-robotics/chinese-humanoid-robot-stuns-with-ballet Description: UBTECH demonstates its new Walker C1 robot performing Swan Lake ballet with humans, showing advanced humanoid control. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Discover the engineering revolution transforming modern defense with Strength, Stealth, Speed: The Very Fast Future of Advanced Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Future of Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. UBTECH unveils the Walker C1, a full-size commercial humanoid robot that blends precise motion control with artistic performance. Chinese robotics company UBTECH unveiled its Walker C1 by making it perform ballet movements from Swan Lake alongside human dancers. The full-size humanoid demonstrated advanced balance, precise motion control, and coordinated body movement during the live presentation. Designed for service roles in public environments such as hotels, airports, and exhibition centers, the Walker C1 highlights UBTECH’s latest developments in humanoid robotics, artificial intelligence, and human-like mobility. Last year, China’s LimX Dynamics showcased its full-size humanoid robot LimX Oli executing ballet-style dance moves during a live performance art debut. The performance marked UBTECH’s being named the official exclusive humanoid robot partner of Chain Expo (China International Supply Chain Expo) 2026. The firm’s new-generation full-size commercial service humanoid robot, Walker C1, performed waltz and ballet routines alongside human dancers during a live demonstration highlighting its precision movement, balance, and coordination. “This is more than a dance. It’s a glimpse into the future of intelligent service robotics — where full-scale humanoids work, interact, and move alongside us in perfect harmony. The future of service robotics has never looked so elegant,” said the firm in the YouTube video description. UBTECH has not released detailed specifications for its new humanoid C1 robot. However, it is expected to be similar to the company’s Walker C model, a full-size, electric-driven, embodied intelligent humanoid robot designed for commercial environments. Powered by UBTECH’s self-developed embodied interactive large model, Walker C supports multilingual interaction for applications such as exhibition halls, office buildings, shopping malls, transport hubs, and public service areas. It can function as a guide, receptionist, and smart assistant, offering Q&A support, voice broadcasting, and interactive engagement. The robot features U-SLAM navigation for autonomous route planning, whole-body motion control, and obstacle detection for dynamic environments. It can walk at speeds of up to 3.7 mph (6 km/h) and perform human-like gestures and dance movements. Additional capabilities include AI-powered multilingual narration, adaptive service responses, and human-robot interaction through multiple degrees of freedom. It has been deployed in real-world settings such as Expo 2025 Osaka, where it serves as an intelligent tour guide in the China Pavilion. Last year, UBTECH announced that it rolled out its 1,000th Walker S2 humanoid robot from its Liuzhou manufacturing facility, marking a key milestone in its production scale-up. The company said more than 500 Walker S2 units are already deployed and operating across multiple real-world applications. The milestone reflects a transition from prototype development to large-scale commercial deployment of humanoid robots. UBTECH also outlined plans to significantly expand production capacity, targeting up to 10,000 units annually by 2026, as demand for industrial and service humanoid robots continues to grow. UBTECH reported securing orders worth approximately 800 million yuan (about $113 million) in 2025, spanning customized robotic systems and large-scale deployments. One major contract in September involved a well-known Chinese company placing a 250 million yuan ($35 million) order for advanced robotics solutions. Additional commitments include 159 million yuan ($22.5 million) from a customer in Sichuan and 126 million yuan ($17.9 million) from a Guangxi-based project, alongside more than 100 million yuan ($14.2 million) from Midea Auto in Hubei. According to the firm, demand is being strongly driven by the automotive sector, with companies such as BYD, Geely Auto, FAW-Volkswagen, Dongfeng Liuzhou Motor, and Foxconn adopting humanoid robots for manufacturing and logistics operations. These deployments focus on enabling continuous, low-supervision operations in factories and warehouses, where early trials indicate stable performance in real-world industrial environments. Recently, UBTECH signed a strategic cooperation agreement with Siemens Digital Industries Software to accelerate large-scale humanoid robot manufacturing and achieve the target annual production capacity of 10,000 units by 2026. Signed in Shenzhen on March 16, the partnership combines UBTECH’s humanoid robotics technology with Siemens’ industrial digitalization and smart manufacturing expertise as demand for industrial humanoid robots continues to increase. Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Images (10): |
|||||
| Humanoid robots join human models in rampwalk at Seoul fashion … | https://interestingengineering.com/ai-r… | 10 | Jun 05, 2026 00:00 | active | |
Humanoid robots join human models in rampwalk at Seoul fashion showURL: https://interestingengineering.com/ai-robotics/humanoid-robot-fashion-show Description: Humanoid robots wearing designer clothing walked alongside human models at a futuristic fashion show in Seoul. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Discover the engineering revolution transforming modern defense with Strength, Stealth, Speed: The Very Fast Future of Advanced Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Future of Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. The Seoul fashion show explored how humans and robots may coexist in everyday life. Humanoid robots wearing designer outfits walked alongside human models at a fashion show in Seoul this week, offering a glimpse into how South Korea’s technology industry imagines a future where robots are not just tools, but participants in everyday cultural life. The event, called the “Mach33: Physical AI Fashion Show,” was hosted by South Korean entertainment technology company Galaxy Corporation and featured robots and humans walking the runway together in coordinated outfits. Videos and images from the show depicted humanoid robots strutting down the catwalk, posing beside models, and performing synchronized choreography. According to Reuters, the event was designed around the idea of humans and robots coexisting in daily life, with matching outfits intended to imagine how future interactions between people and physical AI systems might look. The fashion show took place at Galaxy Robot Park in Seoul, a recently opened robot-themed entertainment complex that combines robotics, artificial intelligence, K-pop culture, and interactive attractions. Humanoid robots have traditionally been demonstrated in controlled industrial settings, research laboratories, or technology exhibitions focused on engineering capabilities. The Seoul event reflected a growing shift toward presenting robots in social, cultural, and entertainment environments rather than purely technical ones. According to Reuters and local South Korean media reports, the runway presentation featured robots dressed in designer clothing and paired with human models, with organizers describing the concept as a “physical AI” showcase. Galaxy Corporation has increasingly positioned itself as an “enter-tech” company that combines entertainment and advanced technology. The firm is also known for managing major Korean entertainment figures, including K-pop star G-Dragon. The fashion show was part of a broader effort by the company to expand robot-centered entertainment experiences. Reports indicate Galaxy also plans robot concerts, interactive performances, and additional AI-focused cultural events. The runway event arrives as South Korea continues to strengthen its position as one of the world’s most robot-intensive economies. South Korea has one of the highest robot densities globally, with more than 1,000 industrial robots for every 10,000 workers. The country has invested heavily in automation, advanced manufacturing, artificial intelligence, and humanoid robotics. In recent years, South Korea has also launched major initiatives to accelerate domestic humanoid robot development, including collaborations among technology firms, universities, and government-backed research programs. At the same time, robotics companies worldwide are increasingly attempting to move humanoid machines beyond factories and warehouses into environments where they interact more directly with people. That transition remains difficult. While modern humanoid robots have become significantly better at walking, balancing, dancing, and performing choreographed movements, researchers continue to face challenges involving dexterity, autonomy, perception, and natural human-robot interaction. Still, events like the Seoul runway show demonstrate how robotics is increasingly being presented not just as an industrial technology, but as part of broader discussions about culture, design, entertainment, and daily life. Whether robot fashion shows become a lasting trend or remain a technological novelty, the sight of humanoid machines sharing the catwalk with human models shows how quickly robotics is moving into spaces once considered uniquely human. Kaif Shaikh is a journalist and writer passionate about turning complex information into clear, impactful stories. His writing covers technology, sustainability, geopolitics, and occasionally fiction. A graduate in Journalism and Mass Communication, his work has appeared in the Times of India and beyond. After a near-fatal experience, Kaif began seeing both stories and silences differently. Outside work, he juggles far too many projects and passions, but always makes time to read, reflect, and hold onto the thread of wonder. Premium Follow
Images (10): |
|||||
| Humanoid Robots Remain Years Away From Replacing Human Workers | https://cointelegraph.com/news/ai-human… | 10 | Jun 05, 2026 00:00 | active | |
Humanoid Robots Remain Years Away From Replacing Human WorkersURL: https://cointelegraph.com/news/ai-humanoid-robots-years-away-from-replacing-human-workers Description: AI-powered humanoid robots are still years away from replacing human workers due to challenges with adaptability, reliability, safety and real-world performance, researchers say. Content:
AI robotics company Figure posted several videos on X throughout May showcasing its robots performing basic tasks, including cleaning a room and sorting packages. Modern artificial intelligence-powered robots are impressive in their capabilities, but are still years away from replacing humans as they can’t yet adapt to changing conditions, researchers say. Last month, AI robotics company Figure showcased its humanoid robots performing basic tasks, such as cleaning a room, but a series of robots working for nine days straight sorting packages sparked conversation about how soon robots could replace jobs. Oliver Obst, an associate professor of robotics at the Australia based University of New South Wales, told Cointelegraph that repetitive jobs such as physical work in structured environments are currently most at risk of being replaced by robots, while administrative and document-processing tasks could be replaced by AI. There has been growing concern that AI and robots will replace people in jobs as technology advances. A report in May from workforce consulting firm Challenger, Gray and Christmas found that US companies have laid off an estimated 49,135 people in 2026 due to AI. A group of Figure’s robots worked for nine days straight sorting packages. Source: Figure However, Obst said that humanoid robots are unlikely to see a mass rollout soon because they don’t appear to be more efficient or less error-prone than current robotic manufacturing methods. “Even in relatively structured settings, they still face problems with reliability, speed, safety, cost, and recovery from unexpected situations,” he said. “The harder the environment is to control, the harder the robotics problem becomes. Most human jobs involve more variation and more judgment than the package-sorting demonstration.” In another video in May, a human worker managed to sort more packages compared to a team of Figure’s robots, which swapped out when needing a recharge. Figure CEO Brett Adock said it would be the last time “a human will ever win.” Source: Brett Adock Markus Levin, co-founder of decentralized data network XYO, said AI models and automation software can perform repetitive tasks with far greater consistency and endurance than humans; however, robots still require charging, maintenance and supervision. A report in September from the International Federation of Robotics found that global demand for factory robots has doubled over the last decade, with warehouses and logistics among the fastest-growing areas of adoption. “I believe broad human replacement is still likely years away,” Levin added, “Reliability, safety, regulation, infrastructure costs, and trust remain major barriers to full-scale deployment across society. The challenge is no longer simply making machines capable of acting but ensuring they can operate safely and reliably as they take on greater autonomy.” Dr Francisco Cruz Naranjo, a senior lecturer at the University of New South Wales with a PhD in robotics, said the efficiency of robots compared to people depends heavily on the activity and the environment. Related: ‘Developed ecosystem’ based on crypto has sprung up for AI agents: Report “Robots are much better at repetitive tasks without the need for constant pauses, as showcased in the Figure livestream. However, in highly dynamic environments, robots still struggle to quickly adapt to changing conditions,” he said. Naranjo said repetitive jobs performed in a less static setting are at risk of being replaced by robots, but it will depend on how quickly research advances and how quickly society adapts in areas like making spaces robot-friendly, which is likely years away. Naranjo and Obst said that a mass rollout of robots in the workforce could be of some benefit, such as improving work-life balance, increasing the workforce in areas with shortages, and addressing dangerous environments that are too risky for humans. “The social question is harder. If robots make dangerous work cheaper in human terms, that can be good. But it can also have unintended consequences. For example, keeping humans out of harm’s way in military operations may save lives, but it could also lower the perceived cost of conflict,” Obst said. Magazine: Korea’s first memecoin rug-pull case, China’s crypto rules review: Asia Express More on the subject Cointelegraph is committed to providing independent, high-quality journalism across the crypto, blockchain, AI, and fintech industries. All news, reviews, and analyses are produced with full journalistic independence and integrity. For more details on our standards and processes, please read our Editorial Policy.
Images (10): 


|
|||||
| Humanoid Robots Remain Years Away From Replacing Human Workers<!-- --> … | https://www.zerohedge.com/ai/humanoid-r… | 10 | Jun 05, 2026 00:00 | active | |
Humanoid Robots Remain Years Away From Replacing Human Workers<!-- --> | ZeroHedgeURL: https://www.zerohedge.com/ai/humanoid-robots-remain-years-away-replacing-human-workers Description: ZeroHedge - On a long enough timeline, the survival rate for everyone drops to zero Content:
Authored by Stephen Katte via Cointelegraph, AI robotics company Figure posted several videos on X throughout May showcasing its robots performing basic tasks, including cleaning a room and sorting packages. Modern artificial intelligence-powered robots are impressive in their capabilities, but are still years away from replacing humans as they can't yet adapt to changing conditions, researchers say. Last month, AI robotics company Figure showcased its humanoid robots performing basic tasks, such as cleaning a room, but a series of robots working for nine days straight sorting packages sparked conversation about how soon robots could replace jobs. Welcome to Day 9 of our humanoid livestream: 191 consecutive hours and 238,000 packages. Oliver Obst, an associate professor of robotics at the Australia based University of New South Wales, told Cointelegraph that repetitive jobs such as physical work in structured environments are currently most at risk of being replaced by robots, while administrative and document-processing tasks could be replaced by AI. There has been growing concern that AI and robots will replace people in jobs as technology advances. A report in May from workforce consulting firm Challenger, Gray and Christmas found that US companies have laid off an estimated 49,135 people in 2026 due to AI. However, Obst said that humanoid robots are unlikely to see a mass rollout soon because they don't appear to be more efficient or less error-prone than current robotic manufacturing methods. "Even in relatively structured settings, they still face problems with reliability, speed, safety, cost, and recovery from unexpected situations," he said. "The harder the environment is to control, the harder the robotics problem becomes. Most human jobs involve more variation and more judgment than the package-sorting demonstration." "I would not say we are at the point of mass replacement by humanoid robots. We are much closer to the selective automation of some tasks. AI software is moving faster and is already affecting some forms of information work, but physical robots still have a much harder problem to solve." In another video in May, a human worker managed to sort more packages compared to a team of Figure's robots, which swapped out when needing a recharge. Figure CEO Brett Adock said it would be the last time "a human will ever win." Congrats to Aime!! He said his left forearm is basically broken. Final scores: F.03: 12,732 packages (2.83 seconds/package) - Aime: 12,924 packages (2.79 seconds/package). This is the last time a human will ever win. Markus Levin, co-founder of decentralized data network XYO, said AI models and automation software can perform repetitive tasks with far greater consistency and endurance than humans; however, robots still require charging, maintenance and supervision. A report in September from the International Federation of Robotics found that global demand for factory robots has doubled over the last decade, with warehouses and logistics among the fastest-growing areas of adoption. "I believe broad human replacement is still likely years away," Levin added, "Reliability, safety, regulation, infrastructure costs, and trust remain major barriers to full-scale deployment across society. The challenge is no longer simply making machines capable of acting but ensuring they can operate safely and reliably as they take on greater autonomy." Dr Francisco Cruz Naranjo, a senior lecturer at the University of New South Wales with a PhD in robotics, said the efficiency of robots compared to people depends heavily on the activity and the environment. "Robots are much better at repetitive tasks without the need for constant pauses, as showcased in the Figure livestream. However, in highly dynamic environments, robots still struggle to quickly adapt to changing conditions," he said. "Humans, in this case, are much better. This is precisely why robots at the moment are highly efficient in controlled environments, such as factories, but they have not yet succeeded widely in home settings." Naranjo said repetitive jobs performed in a less static setting are at risk of being replaced by robots, but it will depend on how quickly research advances and how quickly society adapts in areas like making spaces robot-friendly, which is likely years away. Naranjo and Obst said that a mass rollout of robots in the workforce could be of some benefit, such as improving work-life balance, increasing the workforce in areas with shortages, and addressing dangerous environments that are too risky for humans. "The social question is harder. If robots make dangerous work cheaper in human terms, that can be good. But it can also have unintended consequences. For example, keeping humans out of harm's way in military operations may save lives, but it could also lower the perceived cost of conflict," Obst said. "Hypothetically, if we became very successful at automating almost all work, then society would need to rethink economies that are currently built around individual wages and employment." Assistance and Requests: Contact Us Tips: tips@zerohedge.com General: info@zerohedge.com Legal: legal@zerohedge.com Advertising: Contact Us Abuse/Complaints: abuse@zerohedge.com Make sure to read our "How To [Read/Tip Off] Zero Hedge Without Attracting The Interest Of [Human Resources/The Treasury/Black Helicopters]" Guide It would be very wise of you to study our privacy policyand our (non)policy on conflicts / full disclosure.Here's our Cookie Policy. How to report offensive comments Notice on Racial Discrimination.
Images (10): |
|||||
| LCQ4: Development of embodied intelligence technologies | https://www.info.gov.hk/gia/general/202… | 5 | Jun 04, 2026 00:01 | active | |
LCQ4: Development of embodied intelligence technologiesURL: https://www.info.gov.hk/gia/general/202606/03/P2026060300470.htm Description: Following is a question by Professor the Hon William Wong and a reply by the Secretary for Innovation, Technology and Industry, Professor Sun Dong, in the Legislative Council today... Content: Images (5): 



|
|||||
| Why Google Gave Up on Boston Dynamics - Geeky Gadgets | https://www.geeky-gadgets.com/why-googl… | 10 | Jun 03, 2026 00:00 | active | |
Why Google Gave Up on Boston Dynamics - Geeky GadgetsURL: https://www.geeky-gadgets.com/why-google-sold-boston-dynamics/ Description: Discover why Google sold Boston Dynamics in 2017 and how the robotics company finally achieved commercial success under Hyundai. Content:
Geeky Gadgets The Latest Technology News 7:00 am May 30, 2026 By Julian Horsey Google’s decision to sell Boston Dynamics in 2017 underscored the tension between research-driven robotics and the demands of commercial viability. As Chromeborne explains, the sale stemmed from a mismatch between Boston Dynamics’ emphasis on experimental advancements, such as the humanoid robot Atlas and Google’s focus on creating products with clear and immediate market applications. This case illustrates the broader challenge of balancing long-term technological exploration with the pressures of short-term business goals. Explore how Boston Dynamics shifted its priorities under new ownership, including its move toward warehouse automation and logistics. Gain insight into the roles played by SoftBank and Hyundai in shaping the company’s trajectory. Understand the broader implications of integrating advanced robotics into industries that demand both innovation and profitability. TL;DR Key Takeaways : Boston Dynamics was established in 1992 by Marc Raibert, a visionary in the field of robotics. His ambition was to create machines capable of mimicking the agility, balance and movement of animals. From its inception, the company concentrated on dynamic locomotion, pushing the boundaries of what robots could achieve. Early projects were heavily research-driven, often funded by organizations like the Defense Advanced Research Projects Agency (DARPA). These initiatives prioritized technological breakthroughs over immediate commercial applications, solidifying Boston Dynamics’ reputation as a leader in innovation. The company’s early work laid the groundwork for its future success. By focusing on solving complex problems in robotic movement, Boston Dynamics developed technologies that would later influence the broader robotics industry. However, this emphasis on research over practicality also posed challenges, particularly when it came to finding real-world applications for their innovations. Boston Dynamics achieved several key breakthroughs that demonstrated the potential of advanced robotics. These milestones not only showcased the company’s technical expertise but also highlighted the challenges of translating innovation into practical use: While these innovations were new, their lack of immediate, practical applications hindered their commercial potential. This gap between technological achievement and market readiness became a recurring challenge for Boston Dynamics. Expand your understanding of Boston Dynamics with additional resources from our extensive library of articles. In 2013, Google acquired Boston Dynamics as part of its broader exploration into robotics and automation. At the time, Google was investing heavily in emerging technologies, aiming to position itself as a leader in the field. However, the partnership quickly revealed a fundamental misalignment of priorities. Google sought to develop robots that could address immediate industrial needs, focusing on market-ready solutions. In contrast, Boston Dynamics remained committed to long-term innovation and experimental prototypes. This divergence in goals created tension between the two companies. Boston Dynamics’ research-driven approach did not align with Google’s commercial ambitions, leading to friction and ultimately the decision to sell the company in 2017. The sale highlighted the challenges of integrating a research-focused organization into a commercially driven enterprise. When SoftBank acquired Boston Dynamics in 2017, the company began to pivot toward practical, real-world applications. This shift was evident in the development of quieter, electric-powered robots like Spot, which was designed to perform tasks in various industries. Spot’s capabilities included: Spot’s versatility and ability to navigate complex environments made it a valuable tool for industries such as construction, energy and manufacturing. Additionally, Boston Dynamics’ acquisition of Kinema Systems, a company specializing in robotic vision, enhanced its robots’ autonomy and adaptability, further aligning the company with market demands. In 2021, Hyundai acquired Boston Dynamics, marking another significant turning point in the company’s evolution. With Hyundai’s backing, Boston Dynamics intensified its focus on aligning its innovations with industrial needs. This partnership emphasized the development of robots for factory and warehouse automation, areas where robotics could deliver immediate value. Under Hyundai’s ownership, Boston Dynamics expanded the applications of its robots. Spot became a reliable tool for inspection tasks, while Atlas demonstrated potential for performing repetitive labor in controlled environments. This shift toward practical, real-world uses allowed Boston Dynamics to transition from a research-focused organization to a commercially viable enterprise. Hyundai’s support also provided the resources needed to scale production and refine the company’s technologies for broader adoption. Boston Dynamics faced numerous challenges throughout its journey, including: The company addressed these challenges by focusing on autonomy, environmental awareness and electric-powered designs. By adapting its technologies to meet market demands, Boston Dynamics successfully bridged the gap between innovation and practicality. This approach not only ensured the company’s survival but also solidified its position as a leader in the robotics industry. Today, Boston Dynamics is recognized as a pioneer in robotics, producing machines with clear, defined purposes. Spot has become a staple in industrial inspections, while Atlas continues to evolve as a platform for repetitive tasks in controlled environments. The company’s transformation from a research-driven organization to a commercially focused business underscores its ability to adapt and thrive in a competitive and rapidly evolving industry. As robotics technology continues to advance, Boston Dynamics remains at the forefront, shaping the future of automation and dynamic locomotion. Its journey serves as a powerful example of how innovation, when balanced with practicality, can drive progress and redefine what is possible in the field of robotics. Media Credit: Chromeborne Disclosure: Some of our articles include affiliate links. If you buy something through one of these links, Geeky Gadgets may earn an affiliate commission. Learn about our Disclosure Policy.
Images (10): 


|
|||||
| Vous vous souvenez du robot Figure 03 ? Il travaille … | https://www.lebigdata.fr/vous-vous-souv… | 10 | Jun 02, 2026 16:00 | active | |
Vous vous souvenez du robot Figure 03 ? Il travaille maintenant 40 heures d’affiléeDescription: Le robot Figure 03 de Figure AI vient d'effectuer plus de 40 heures de tri de colis autonome sans pause ni assistance humaine. Content:
Tinah F. Publié le 15 mai 2026 Mis à jour le 19 mai 2026 2 minutes de lecture Robotique Le robot Figure 03 de Figure AI vient de réaliser une démonstration qui fait parler dans le monde de la robotique. Il a effectué plus de 40 heures de tri de colis autonome sans pause ni assistance humaine. Ce qui est impressionnant dans cette histoire, ce n’est pas seulement qu’un robot humanoïde sache déplacer des colis sans tout faire tomber au bout de trois minutes. Le vrai sujet, c’est l’autonomie. Le robot Figure 03 aurait travaillé plus de 40 heures d’affilée sans interruption, sans assistance humaine et sans pause improvisée devant une machine à café inexistante. Figure AI veut donc prouver l’endurance de ses machines. Derrière cette démonstration, il y a surtout Helix-02, le nouveau réseau neuronal développé par Figure AI. C’est lui qui pilote les capacités des robots Figure 03 pendant ces longues sessions de travail. Le point mis en avant par l’entreprise n’est pas seulement la précision des mouvements. Figure insiste surtout sur la continuité du service. Les robots peuvent détecter certaines erreurs et reprendre automatiquement une tâche interrompue. Ils seraient aussi capables de gérer le remplacement de leurs batteries grâce à plusieurs unités fonctionnant en relais. ⚡️ INSIGHT: Figure says its robot crossed 30 hours of continuous autonomous work with no downtime. pic.twitter.com/4uAcPmoUYV Autrement dit, l’objectif n’est plus simplement de fabriquer un robot qui sait déplacer une boîte. Le vrai défi consiste maintenant à maintenir un système autonome pendant des dizaines d’heures dans un environnement industriel réel. Et c’est précisément là que les choses deviennent intéressantes. Parce qu’entre une vidéo virale sur X et une chaîne logistique qui tourne jour comme de nuit, il y a un gouffre technique et financier. Figure AI affirme également avoir expédié 350 robots depuis son usine BotQ de Sunnyvale, avec un rythme d’environ un robot produit par heure. Ces chiffres montrent surtout l’ambition industrielle de la société. Figure AI commence à se faire de la place dans le domaine de la robotique. Fondée seulement en 2022 par Brett Adcock, la société s’est rapidement imposée dans une course dominée par des géants comme Tesla ou Boston Dynamics. L’arme principale de Figure AI, c’est évidemment le robot Figure 03. Cet humanoïde de troisième génération représente une énorme évolution par rapport aux anciens prototypes de la marque. Beaucoup de robots humanoïdes restent encore limités à des démonstrations très contrôlées. De son côté, Figure 03 cherche surtout à prouver qu’il peut fonctionner dans des environnements réels. Et l’entreprise multiplie les démonstrations pour le montrer. Ces derniers mois, Figure AI a notamment diffusé une vidéo où l’on voit le robot ranger une chambre, déplacer des objets et organiser l’espace avec des gestes étonnamment fluides. 28 mai 2026 26 mai 2026 25 mai 2026 Rejoignez nos 100 000 passionnés et experts et recevez en avant-première les dernières tendances de l’intelligence artificielle🔥 Accueil > Robotique > Vous vous souvenez du robot Figure 03 ? Il travaille maintenant 40 heures d’affilée Rejoignez nos 100 000 passionnés et experts et recevez en avant-première les dernières tendances de l’intelligence artificielle🔥 Rejoins nos 100 000 passionnés et experts et reçois en avant-première les dernières tendances de l’intelligence artificielle🔥
Images (10): 


|
|||||
| Due umanoidi, un piumone e nessuna regia centrale: la nuova … | https://www.dday.it/redazione/57354/due… | 4 | Jun 02, 2026 16:00 | active | |
Due umanoidi, un piumone e nessuna regia centrale: la nuova demo dei robot di Figure AI | DDay.itDescription: I robot rassettano la stanza, spostando oggetti, e soprattutto risistemando il letto senza una regia centrale: osservano i rispettivi movimenti e decidono l'azione Content:
Figure ha mostrato un nuovo video che ha per protagonista un "attore" nascosto, Helix 02, il sistema di controllo basato su una policy Vision-Language-Action che guida i suoi robot umanoidi. Nel filmato due robot F.03 sistemano una camera da letto in meno di due minuti. La scena che ha attirato più attenzione è quella del letto: i due umanoidi si mettono ai lati opposti, sollevano e stendono il piumone, correggono le pieghe e lavorano sullo stesso oggetto deformabile. Secondo Figure, i due robot usano una sola rete appresa, capace di tradurre immagini e istruzioni in movimenti. Non ci sarebbe un pianificatore condiviso, né scambio di messaggi o regia centrale. Ogni umanoide osserva la stanza dalle proprie telecamere e deduce le intenzioni dell'altro dai movimenti. Vai all'approfondimento La sequenza include anche altre azioni. Attraverso gli arti dei due robot, Helix 02 apre porte, appende un indumento, mette via cuffie su un supporto, chiude un libro, getta un rifiuto usando il pedale del cestino e spinge una sedia sotto la scrivania. Servono camminata, equilibrio, mani e lettura continua dell'ambiente. La collaborazione intorno al letto resta il passaggio più interessante. Un piumone non ha una posa fissa, si piega, scivola e cambia forma dopo ogni tiro. Quando un robot modifica la tensione del tessuto, anche il compito dell'altro cambia nello stesso istante. Come sempre in questi casi, la demo però mostra una camera specifica e non chiarisce quante prove siano state necessarie, o quanto cambi l’esito con oggetti disposti diversamente o con arredi non presenti nei dati di addestramento. Cioè, in sostanza, se i robot F.03 con Helix 02 riuscirebbero a destreggiarsi in qualsiasi altro ambiente. © riproduzione riservata Copyright © 2026 DDay.it - Scripta Manent servizi editoriali srl - Tutti i diritti sono riservati - P.IVA 11967100154
Images (4): 


|
|||||
| Il Video di Figure AI Annuncia l'Accelerazione della Produzione del … | https://www.mooseek.com/v/il-video-di-f… | 10 | Jun 02, 2026 16:00 | active | |
Il Video di Figure AI Annuncia l'Accelerazione della Produzione del Robot Umanoide F.03 presso BotQ | MooseekDescription: Figure AI pubblica un aggiornamento cruciale sulla rampa di produzione del suo robot umanoide di terza generazione, il F.03, nello stabilimento BotQ. Il video, Content:
Figure AI pubblica un aggiornamento cruciale sulla rampa di produzione del suo robot umanoide di terza generazione, il F.03, nello stabilimento BotQ. Il video, caricato il 29 aprile 2026, dura circa 2 minuti e 53 secondi e mostra le impressionanti conquiste industriali raggiunte dall’azienda. In soli 120 giorni, Figure ha scalato la produzione di 24 volte, passando da 1 robot al giorno a 1 robot all’ora. Questa crescita esponenziale dimostra la maturità del processo manifatturiero, passando da prototipi artigianali a una linea di produzione automatizzata e scalabile. Figure AI, fondata nel 2022 da Brett Adcock e con sede a Sunnyvale in California, si posiziona come leader nella robotica AI per creare umanoidi autonomi commercialmente viabili. BotQ rappresenta l’impianto manifatturiero dedicato di Figure, progettato per alte volumi senza dipendere da fornitori esterni, garantendo controllo su qualità e iterazioni rapide. Questa settimana, l’azienda produrrà 55 robot F.03, confermando l’obiettivo di 12.000 unità annue sulla prima linea, con un target di 100.000 robot in quattro anni. La transizione a processi come fusione sotto pressione, stampaggio a iniezione e timbratura ha ridotto drasticamente i costi unitari, rendendo il F.03 pronto per la scala globale. Il F.03 è stato ridisegnato da zero per Helix, il modello vision-language-action di Figure, integrando percezione, ragionamento e controllo in un unico cervello generalista. Con un design più morbido e testurizzato, mani dexterous a 20 gradi di libertà e batteria integrata nel torso con densità energetica aumentata del 94% rispetto alle generazioni precedenti, il robot è ottimizzato per compiti domestici come lavare piatti o pulire. Figure mira a portare questi umanoidi in ogni casa, espandendo le capacità umane attraverso AI avanzata e produzione di massa. Sfruttando offload dati ad alta velocità, flotte di F.03 possono caricare terabyte per apprendimento continuo, rivoluzionando fabbriche e residenze. Il video non è solo un annuncio, ma una vetrina sul progresso di Figure verso la produzione seriale, evidenziando l’impegno per supply chain interne e innovazione hardware. Rilasciato in un momento di accelerazione manifatturiera, rafforza la posizione di Figure nel panorama competitivo della robotica, con focus su sicurezza, costo-efficacia e autonomia reale. Questa milestone a BotQ segnala che i robot umanoidi non sono più prototipi da laboratorio, ma prodotti pronti per il deployment massivo. Figure AI sta trasformando l’industria robotica, puntando a umanoidi versatili per case e fabbriche entro i prossimi anni. Il tuo indirizzo email non sarà pubblicato. I campi obbligatori sono contrassegnati * Commento * Nome * Email * Sito web Salva il mio nome, email e sito web in questo browser per la prossima volta che commento. Il video è la registrazione del keynote tenuto da Jensen Huang, fondatore e CEO di NVIDIA, all’NVIDIA GTC Taipei 2026, svoltosi in coincidenza con il COMPUTEX di Taipei il 31 maggio 2026 presso il Taipei Music Center. Si tratta di uno degli eventi tecnologici più attesi dell’anno, nel corso del quale Huang ha annunciato alcune […] Il video pubblicato dall’archivio della BBC è un affascinante documento storico tratto dalla trasmissione Micro Live, originariamente andata in onda su BBC Two il 12 dicembre 1986. In poco più di sei minuti, la giornalista Lesley Judd compie un viaggio dall’Inghilterra all’aeroporto di Schiphol, in Olanda, per dimostrare al pubblico televisivo dell’epoca come fosse possibile […] Il video pubblicato da OpenAI il 22 maggio 2026 presenta il lancio in preview di una nuova esperienza di finanza personale integrata in ChatGPT, disponibile per gli utenti Pro negli Stati Uniti. Connessione sicura dei conti finanziari Gli utenti possono ora collegare in modo sicuro i propri conti bancari e finanziari a ChatGPT attraverso Plaid, […] Google I/O 2026 viene presentato come il momento in cui l’azienda fa un salto netto verso una “era agentica”, in cui l’intelligenza artificiale non si limita a rispondere ma pianifica, decide e agisce nel mondo digitale degli utenti.Il keynote mette al centro Gemini come piattaforma unificata che alimenta prodotti, servizi e dispositivi, con l’obiettivo dichiarato […] Cos’è Googlebook Googlebook è il nuovo nome di una categoria di laptop che Google ha presentato recentemente nell’ambito dell’Android Show 2026, posizionandolo come il primo portatile progettato da cima a fondo per Gemini Intelligence. Non è un semplice Chromebook con un’assistente AI in più, ma un sistema operativo‑hardware pensato per integrare l’intelligenza artificiale direttamente nel […] L’Opening Keynote di Code with Claude 2026 rappresenta il momento inaugurale della conferenza organizzata da Anthropic per mostrare l’evoluzione di Claude nel lavoro degli sviluppatori, dei team tecnici e delle aziende che stanno integrando agenti AI nei propri processi. La sessione ufficiale si è tenuta a San Francisco il 6 maggio 2026, dalle 09:00 alle […] Il video presenta un’eccezionale trasformazione di una iconica Ford Mustang del 1966 in un veicolo completamente elettrico, un progetto ambizioso portato a termine da Calimotive Auto Recycling a Sacramento, California. Questa build, durata due anni, fonde il fascino vintage della muscle car americana con le tecnologie all’avanguardia di Tesla, creando un’auto unica che mantiene l’estetica […] Ubuntu 26.04 LTS, nome in codice Resolute Raccoon, è stata rilasciata il 23 aprile 2026 da Canonical come undicesima release long-term support di Ubuntu. È pensata per un uso professionale e di produzione, con un forte accento su affidabilità, sicurezza e supporto ai carichi di lavoro moderni, in particolare nell’ambito dell’intelligenza artificiale e dell’infrastruttura cloud. […] Figure AI pubblica un aggiornamento cruciale sulla rampa di produzione del suo robot umanoide di terza generazione, il F.03, nello stabilimento BotQ. Il video, caricato il 29 aprile 2026, dura circa 2 minuti e 53 secondi e mostra le impressionanti conquiste industriali raggiunte dall’azienda. In soli 120 giorni, Figure ha scalato la produzione di 24 […] Brick Machines ha realizzato una LEGO Coffee Factory capace di preparare il caffè su comando tramite smartphone, trasformando una semplice costruzione in una macchina funzionante e scenografica. Il progetto unisce creatività, automazione e spirito da laboratorio, con un risultato pensato sia per stupire sia per essere davvero utile. Come funziona la macchina La struttura utilizza […] Il video racconta Claude Design come una piattaforma in cui l’utente non si limita a descrivere un’idea, ma la trasforma in un progetto visivo vero e proprio attraverso una conversazione con Claude. Il messaggio più importante è che la progettazione viene resa più immediata, perché l’intelligenza artificiale costruisce una prima versione del lavoro e poi […] Il video “Miniature Mountain Magic: A Tilt-Shift Journey through Four Seasons in the Alps” mostra le Alpi bavaresi in una chiave visiva giocosa e spettacolare, trasformando il paesaggio in un mondo che sembra in miniatura. È un lavoro di Joerg Daiber per il progetto Little Big World, costruito con riprese aeree, time-lapse e tecnica tilt-shift. […] VOXmail è una piattaforma italiana dedicata all'invio di newsletter e all'email marketing, attiva dal 2008 e sviluppata interamente in Italia da Void Labs. Ogni giorno, migliaia di utenti si affidano a questo servizio per raggiungere i propri iscritti con comunicazioni efficaci e profession [...] FlowSpeech è una piattaforma di sintesi vocale basata sull'intelligenza artificiale che trasforma testi, documenti e immagini in audio professionale dall'intonazione naturale, con controllo avanzato delle emozioni, delle pause e dello stile narrativo. Che cos'è FlowSpeech e Come Funzion [...] PicPocket è un’app pensata per condividere e organizzare foto e video con amici, famiglia e gruppi in modo semplice, veloce e ordinato (mette a disposizione spazio per 2000 foto gratis) Sostituisce allegati email e link complicati con uno spazio condiviso che assomiglia a una chat, ma co [...] Cherri (pronunciato "cherry") è un linguaggio di programmazione open source dedicato a Siri Shortcuts, progettato per compilare direttamente uno Shortcut valido e firmato, pronto per essere eseguito su tutti i dispositivi Apple. Che Cos'è Cherri e Qual È il Suo Obiettivo Principale [...] Questo Sfondo dedicato al logo Apple per il WWDC26. Ottimo per iphone ha una risoluzione di 1206 x 2672.. E' appartenente alla categoria Tecnologia ed è reperibile all'interno dei wallpapers della pagina Apple Download Wallpaper L'immagine è ottimizzata per essere utilizzata su smartphone [...] Il video è la registrazione del keynote tenuto da Jensen Huang, fondatore e CEO di NVIDIA, all'NVIDIA GTC Taipei 2026, svoltosi in coincidenza con il COMPUTEX di Taipei il 31 maggio 2026 presso il Taipei Music Center. Si tratta di uno degli eventi tecnologici più attesi dell'anno, nel corso de [...]
Images (10): 




|
|||||
| OneRobotics: il gigante cinese dei robot domestici con AI che … | https://www.smartdomotica.it/news/onero… | 2 | Jun 02, 2026 16:00 | active | |
OneRobotics: il gigante cinese dei robot domestici con AI che sfida Figure AIDescription: OneRobotics, l'azienda cinese dietro SwitchBot, è diventata la prima società al mondo quotata in borsa focalizzata sui robot domestici con AI, con una strategia che punta su dati reali e un'unica intelligenza per robot di forme diverse. Content:
Quando Figure AI ha pubblicato il video Helix-02 Bedroom Tidy, mostrando due robot umanoidi Figure 03 rifare il letto e sistemare i vestiti in una camera, l’industria della robotica ha alzato le antenne. Ma mentre tutti guardavano a ovest, dall’altra parte del mondo stava emergendo con discrezione un protagonista cinese capace di fare molto di più che girare video dimostrativi: OneRobotics. Fondata nel 2015 a Shenzhen da due laureati dell’Harbin Institute of Technology, la società è già nota a milioni di persone per la sua linea SwitchBot di dispositivi per la domotica, tra cui apricurtine intelligenti e serrature connesse. Negli ultimi anni, però, ha compiuto un salto qualitativo significativo, espandendosi nella robotica domestica basata su intelligenza artificiale con un’architettura proprietaria chiamata “One Brain, Multiple Embodiments”, il cui cuore è il modello AI OneModel, capace di condividere capacità e continuare ad evolversi tra diverse tipologie di robot. I numeri raccontano una crescita solida: il fatturato principale è passato da 275 milioni di yuan nel 2022 a 610 milioni di yuan nel 2024, con il Giappone che ha rappresentato il 68% dei ricavi nel primo semestre 2025. Non a caso, la televisione pubblica giapponese NHK ha dedicato un’intervista speciale all’azienda poco dopo la pubblicazione del video di Figure AI, concentrandosi proprio sulla dimostrazione live del robot onero H1 che, in un ambiente domestico reale, ha eseguito il flusso completo di riconoscimento degli indumenti, presa e inserimento nel cestello della lavatrice, senza scenografie costruite ad arte. Il 30 dicembre 2025, OneRobotics è approdata sul Main Board della Borsa di Hong Kong con il codice 06600.HK, diventando la prima società al mondo quotata in borsa focalizzata sui robot domestici con intelligenza artificiale embodied. L’IPO ha raccolto circa 1,64 miliardi di dollari di Hong Kong (circa 188 milioni di euro), e la capitalizzazione di mercato, già a inizio gennaio 2026, aveva superato i 23 miliardi di HKD, pari a circa 2,7 miliardi di euro. Seleziona SmartDomotica.it come fonte preferita su Google L’approccio “una sola mente, molteplici forme” si traduce concretamente in tre linee di prodotto che coprono altrettanti scenari domestici fondamentali. Il robot compagno Kata Friends si rivolge all’interazione e alla compagnia intelligente, Acemate entra nell’ambito dello sport e del benessere, mentre onero H1 affronta i servizi domestici veri e propri. Tutti condividono lo stesso cervello artificiale, con il vantaggio che ogni dato raccolto in un contesto arricchisce l’intera piattaforma. Acemate è già diventato un caso a sé: classificato come il primo robot da tennis con AI al mondo, integra visione artificiale, interazione ad alta dinamica e decision-making in tempo reale per muoversi autonomamente e rispondere ai colpi. Questa innovazione gli ha valso un posto nella celebre lista delle migliori invenzioni 2025 del Time, lo stesso riconoscimento che ha portato anche Figure 03 sotto i riflettori. Una coincidenza che dice molto sulla direzione in cui si sta muovendo l’industria. Sul fronte delle infrastrutture dati, a inizio 2026 OneRobotics ha vinto una gara pubblica a Shenzhen per la costruzione di un “Embodied Intelligence Data Full-Chain Service Center”, un contratto dal valore di 44,95 milioni di yuan (circa 5,6 milioni di euro). Il progetto prevede il dispiegamento di unità onero H1 a doppio braccio mobile, terminali di acquisizione dati UMI e sistemi indossabili per la teleoperazione, con scenari applicativi che spaziano dall’assistenza agli anziani al retail, fino alla ricerca scientifica. Si tratta di un passaggio che segna l’evoluzione dell’azienda da produttore di robot commerciali a vero e proprio fornitore di infrastrutture per la raccolta e l’addestramento dei dati, chiudendo il cerchio tra corpi fisici, scenari reali e miglioramento continuo dei modelli. Con prodotti distribuiti in oltre 90 Paesi e regioni e più di 3,6 milioni di famiglie già servite nel mondo, OneRobotics non parte da zero sul fronte della penetrazione commerciale. E proprio qui risiede forse il vantaggio competitivo più difficile da replicare: non la capacità di girare video spettacolari in ambienti controllati, ma quella di accumulare dati reali da case reali, dove le variabili sono infinite e la complessità non si può simulare in laboratorio. Seleziona SmartDomotica.it come fonte preferita su Google
Images (2): |
|||||
| Figure AI presenta Helix 02: i robot umanoidi che collaborano … | https://www.mrw.it/news/figure-ai-prese… | 10 | Jun 02, 2026 16:00 | active | |
Figure AI presenta Helix 02: i robot umanoidi che collaborano senza regia centrale - MRW.itDescription: Figure AI ha rivelato Helix 02, un sistema innovativo che guida robot umanoidi nella collaborazione autonoma. Content:
Figure AI ha recentemente svelato un avanzato sistema di controllo chiamato Helix 02, progettato per gestire i suoi robot umanoidi. Questo sistema è in grado di guidare i robot senza la necessità di un pianificatore centralizzato, permettendo così una collaborazione fluida e autonoma, come dimostrato in un video che ha catturato l’attenzione del pubblico. Nel video, due robot F.03 sono stati filmati mentre sistemano una camera da letto in meno di due minuti. La scena più impressionante è quella in cui i robot collaborano per sistemare un piumone. Entrambi si posizionano ai lati opposti del letto, sollevano e stendono il piumone, correggendo le pieghe e adattandosi ai movimenti reciproci. Questa azione evidenzia non solo la loro capacità di lavorare insieme, ma anche l’efficacia del sistema Helix 02 nel tradurre istruzioni visive in movimenti coordinati. Una delle caratteristiche distintive di Helix 02 è l’assenza di una regia centrale o di uno scambio di messaggi tra i robot. Ognuno di essi utilizza le proprie telecamere per osservare l’ambiente e dedurre le intenzioni dell’altro in base ai movimenti. Questo approccio decentralizzato consente ai robot di adattarsi rapidamente ai cambiamenti nell’ambiente, rendendoli più versatili e reattivi. Il sistema Helix 02 integra una “memoria muscolare”, che consente ai robot di apprendere e migliorare le proprie abilità nel tempo. Nel video, i robot non solo sistemano il piumone, ma eseguono anche una serie di altre azioni, come aprire porte, appendere indumenti e gettare rifiuti. Tuttavia, la demo solleva interrogativi sulla versatilità di questi robot. Non è chiaro quante prove siano state necessarie per raggiungere tali risultati e come si comporterebbero in ambienti con arredi o oggetti non presenti durante l’addestramento. La tecnologia sviluppata da Figure AI rappresenta un passo significativo verso il futuro della robotica. La capacità di lavorare in modo autonomo e collaborativo potrebbe avere applicazioni in vari settori, dall’assistenza domestica alla logistica. Tuttavia, è fondamentale continuare a esplorare le possibilità e i limiti di questi sistemi per comprendere appieno il loro potenziale e le sfide che si presenteranno. © 2003 - 2025 Mr. Webmaster ® è un marchio registrato.E' vietata ogni forma di riproduzione. Un progetto a cura di IKIweb Internet Media S.r.l. - P.IVA: 02848390122 - NREA: VA-294824 - Cap. soc. 10.000 Eu i.v. - Sede legale: Via Varzi 6, Busto A. (VA) - Sede operativa: Vicolo dell'Assunta 5, Busto A. (VA) Gestisci le preferenze pubblicitarie
Images (10): 
|
|||||
| Figure AI produit désormais un robot humanoïde par heure dans … | https://kulturegeek.fr/news-351646/figu… | 10 | Jun 02, 2026 16:00 | active | |
Figure AI produit désormais un robot humanoïde par heure dans son usine BotQ - KultureGeekURL: https://kulturegeek.fr/news-351646/figure-ai-produit-desormais-robot-humanoide-heure-usine-botq Description: Décidément, l'heure est à la phase de la production de masse pour les robots humanoïdes. La firme américaine Figure AI franchit une étape industrielle Content:
Décidément, l’heure est à la phase de la production de masse pour les robots humanoïdes. La firme américaine Figure AI franchit une étape industrielle majeure en annonçant avoir multiplié par 24 son rythme de production en moins de quatre mois, passant d’un robot par jour à un robot par heure pour son modèle Figure 03 ! Cette montée en cadence s’appuie sur BotQ, l’usine conçue par Figure AI pour fabriquer ses humanoïdes à plus grande échelle. L’entreprise indique avoir déjà produit plus de 350 robots Figure 03 et démontré le cycle nécessaire à ses objectifs de production : « Nous avons réussi à démontrer le temps de cycle d’un robot par heure nécessaire à nos objectifs de production du Figure 03. » Pour y parvenir, Figure AI a mis en place des lignes dédiées aux modules critiques du robot, pilotées par un logiciel interne de gestion de production. Plus de 150 postes de travail connectés seraient désormais utilisés dans cette structure industrielle. Outre cette production de masse, Figure AI dispose aussi d’une unité dédiée à l’entrainement des robots située dans son quartier général : dans ce lieu unique, on peut voir des robots déambuler dans les couloirs ou répéter des gestes précis, le tout donnant l’impression d’être littéralement projeté dans une version réelle de la série Westworld (voir vidéo ci-dessous). La production de centaines de robots permet ainsi Figure AI d’accumuler davantage de données terrain (et plus rapidement) pour améliorer Helix, son système d’intelligence artificielle destiné à piloter les tâches physiques du quotidien. La société affirme aussi avoir dépassé les 9 000 actionneurs produits, avec plus de dix variantes de composants. Figure AI espère ainsi réduire les coûts, fiabiliser les machines et préparer leur déploiement dans les entreprises… avant d’envisager la vente aux particuliers. Signaler une erreur dans le texte Merci de nous avoir signalé l'erreur, nous allons corriger cela rapidement. Δ Nous nous réservons le droit de supprimer les commentaires qui ne respectent pas ces règles Meta a annoncé aujourd’hui de nouveaux garde-fous sur Instagram, Facebook et Messenger pour limiter l’exposition... SFR annonce la disponibilité de « SFR Navigation Protégée », une nouvelle protection de... Anthropic a déposé son projet d’introduction en Bourse, ouvrant une nouvelle phase pour l’un des groupes les plus suivis de... Le premier indice de qualité de MoffettNathanson bouscule la hiérarchie habituelle du streaming en plaçant Apple TV devant Netflix.... Amazon annonce les dates pour le Prime Day 2026, son événement shopping avec plein de réductions : ce sera du 23 juin à... Météo Météo Musique Musique Jeux Musique Musique Divertissement Utilitaires Jeux Thriller Thriller Horreur Thriller Thriller Drame Action et aventure Comédie 2 Jun. 2026 • 16:00 2 Jun. 2026 • 15:11 2 Jun. 2026 • 13:33 2 Jun. 2026 • 11:26 Actualité High-Tech, Culture Geek et comparateur de prix Recherchez le meilleur prix des produits Hi-tech Recherchez des articles sur le site
Images (10): 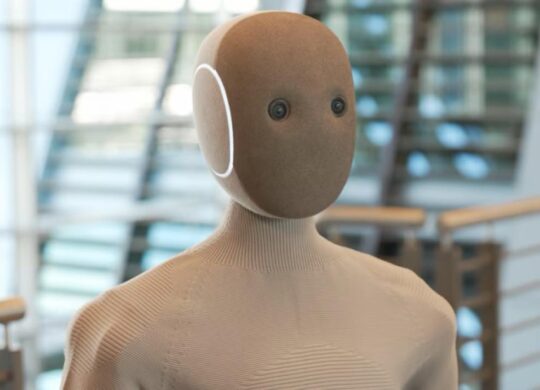
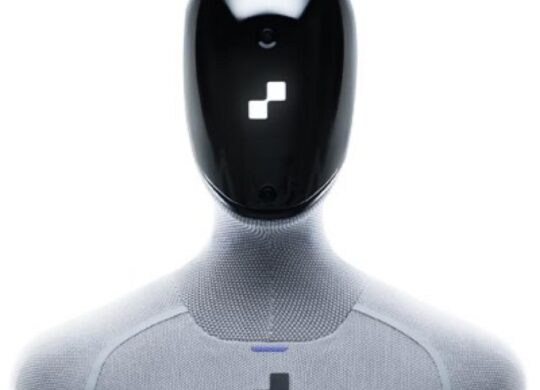


|
|||||
| Robot vs uomo in magazzino: chi ha vinto la sfida … | https://www.libero.it/tecnologia/robot-… | 10 | Jun 02, 2026 16:00 | active | |
Robot vs uomo in magazzino: chi ha vinto la sfida di Figure AI?URL: https://www.libero.it/tecnologia/robot-figure-ai-vs-uomo-magazzino-sfida-117081 Description: Il robot umanoide F.03 di Figure AI ha sfidato un lavoratore umano in magazzino per 10 ore consecutive. Il risultato finale sorprende: scopri cosa è successo. Content:
Figure AI ha messo un robot umanoide contro un lavoratore reale in una sfida di 10 ore. Il risultato finale mostra quanto la distanza si sia ridotta. Pubblicato: 18 Maggio 2026 Biagio Petronaci Tech Editor Scrive di tecnologia e innovazione digitale analizzando trend e impatti socio-culturali. Per anni, il racconto sull’automazione industriale è stato accompagnato dalla stessa idea: i robot avrebbero superato rapidamente gli esseri umani nei lavori ripetitivi. La prova organizzata da Figure AI restituisce invece uno scenario più complesso. Dopo dieci ore consecutive di lavoro in magazzino, il robot umanoide F.03 non è riuscito a battere un dipendente umano in una gara di smistamento pacchi. Il distacco finale è stato minimo, ma sufficiente a lasciare un dato concreto: almeno oggi, nelle attività fisiche reali, l’uomo conserva ancora un vantaggio. La sfida è stata trasmessa in diretta streaming e ha attirato molta attenzione online, anche perché rappresenta uno dei test pubblici più chiari sul livello raggiunto dalla robotica umanoide applicata alla logistica. Il test prevedeva un compito semplice da descrivere, ma difficile da sostenere per ore senza rallentamenti. Il robot e il concorrente umano dovevano individuare il pacco, riconoscere il codice a barre, afferrarlo e posizionarlo correttamente su un nastro trasportatore con il barcode rivolto verso il basso. Da una parte c’era il robot F.03 di Figure AI, dall’altra Aime, intern dell’azienda. Entrambi hanno lavorato per dieci ore consecutive mantenendo la stessa routine operativa. Alla fine della prova, il lavoratore umano ha elaborato 12.924 pacchi contro i 12.732 completati dal robot. Anche la differenza media per singola operazione è stata minima: 2,79 secondi per pacco contro 2,83. Il dato più interessante è proprio questo. Non si tratta più di una macchina lontana dalle prestazioni umane, ma di un sistema ormai abbastanza vicino da rendere il confronto credibile anche in un contesto operativo reale. Durante la competizione, Aime ha effettuato la pausa pranzo e i momenti di riposo previsti dalle normative sul lavoro. Il robot, invece, ha continuato a operare senza interruzioni. Secondo quanto dichiarato dal CEO Brett Adcock, il dipendente avrebbe concluso la giornata con un forte affaticamento fisico e problemi all’avambraccio dopo ore di movimenti ripetuti. È un elemento che cambia il significato del risultato finale. In una singola giornata, il vantaggio umano è rimasto intatto, ma la resistenza sul lungo periodo continua a essere uno dei principali punti di forza delle macchine. Figure AI sostiene infatti che i propri sistemi siano in grado di lavorare per turni molto più lunghi senza cali fisici evidenti. Nei test pubblicati dalla società, i robot avrebbero continuato a smistare pacchi anche oltre la durata della sfida pubblica. La logistica resta uno dei principali obiettivi della robotica umanoide proprio per la natura ripetitiva delle attività di magazzino. Figure AI punta a dimostrare che i suoi robot possano lavorare accanto agli esseri umani, ma secondo alcuni esperti la tecnologia non sarebbe ancora pronta per un’adozione industriale davvero ampia e stabile. La sfida organizzata da Figure AI mette in evidenza un paradosso sempre più evidente. Mentre molte aziende sostengono che l’intelligenza artificiale automatizzerà rapidamente i lavori d’ufficio, i robot umanoidi non riescono ancora a superare gli esseri umani nelle attività fisiche reali. Nonostante i progressi della robotica, il vantaggio umano nei contesti operativi concreti resta tangibile. Allo stesso tempo, però, il risultato ottenuto da F.03 rimane significativo proprio per la distanza ormai ridotta rispetto alle prestazioni di un lavoratore umano. FAQ Chi ha vinto la sfida tra F.03 e l'umano? L'intern Aime ha smistato 12.924 pacchi contro 12.732 del robot F.03, risultando vincitore nella giornata. Qual era il compito della prova? Individuare il pacco, leggere il codice a barre, afferrarlo e posizionarlo con il barcode rivolto verso il basso. Quanto era la differenza media per pacco? La differenza media per singola operazione è stata minima: 2,79 s per l'umano contro 2,83 s per il robot. Il robot ha fatto pause durante la prova? No, il robot ha operato senza interruzioni mentre l'umano ha osservato le pause previste dalle normative. Perché i magazzini sono adatti ai robot umanoidi? La logistica implica attività ripetitive e turni lunghi, dove la resistenza e la continuità delle macchine sono un vantaggio. L'intern Aime ha smistato 12.924 pacchi contro 12.732 del robot F.03, risultando vincitore nella giornata. Individuare il pacco, leggere il codice a barre, afferrarlo e posizionarlo con il barcode rivolto verso il basso. La differenza media per singola operazione è stata minima: 2,79 s per l'umano contro 2,83 s per il robot. No, il robot ha operato senza interruzioni mentre l'umano ha osservato le pause previste dalle normative. La logistica implica attività ripetitive e turni lunghi, dove la resistenza e la continuità delle macchine sono un vantaggio. Come funzionerà il Custom Feed di YouTube? Samsung, la soundbar top oggi costa pochissimo: va comprata subito Smart TV Panasonic, prezzo mai visto prima: solo oggi costa la metà Galaxy A56, con lo sconto di oggi il prezzo crolla al minimo storico Come potrebbe essere fatta una forma di vita aliena? Ecco qualche ipotesi Amazon anticipa il Prime Day 2026: offerte esclusive e iniziative dedicate al Sud Italia Pop-up "polyfill.io" blocca le smart TV Samsung: cos'è e come risolvere subito Nvidia vuole reinventare il PC: il nuovo chip RTX Spark che sfida Intel e Apple Investimenti, incentivi e strategie per il 2026 © Italiaonline S.p.A. 2026Direzione e coordinamento di Libero Acquisition S.á r.l.P. IVA 03970540963
Images (10): 

|
|||||
| Figure AI, saat başı 1 insansı robot üretmeye başladı | … | https://www.donanimhaber.com/figure-ai-… | 10 | Jun 02, 2026 16:00 | active | |
Figure AI, saat başı 1 insansı robot üretmeye başladı | DonanımHaberURL: https://www.donanimhaber.com/figure-ai-saat-basi-1-insansi-robot-uretmeye-basladi--205143 Description: Figure, insansı robot üretimini 4 ayda 24 kat artırarak saatte 1 adede çıkardı. Verimlilik yüzde 80’i aşarken yeni Helix AI modeli robotlardaki görsel algıyı daha da geliştirdi. Content:
Teknoloji ve bilim dünyasını seven ve takip etmekten büyük zevk alan Metin, öğrendiklerini ise DonanımHaber okuyucuları ile paylaşır. Tam Boyutta Gör ABD merkezli robotik şirketi Figure AI, BotQ üretim tesisinde insansı robot modeli Figure 03 için üretim hızını günde bir adet seviyesinden saatte bir adet seviyesine çıkararak yalnızca dört ay içinde 24 katlık artış elde etti. Bu gelişme, şirketin prototip aşamasından seri üretime geçtiğini net biçimde ortaya koyuyor. Üretim artışı, şirketin geliştirdiği özel yazılım altyapısı ve 150’den fazla birbirine bağlı iş istasyonundan oluşan üretim hattı sayesinde mümkün oldu. Figure, bu ölçekleme süreciyle birlikte bugüne kadar 350’den fazla robot teslimatı gerçekleştirdiğini açıkladı. Şirketin hedefi ise yıllık 12.000 robot üretim kapasitesine ulaşmak ve bu kapasiteyi daha da yukarı taşımak. Şirket, sadece bu hafta 55 adet insansı robot üreteceğini de açıkladı. Tam Boyutta Gör Figure, üretim verimliliğini artırmak için tedarik zincirinde kalite standartlarını sıkılaştırdı ve üretim sürecine 50’den fazla ara kontrol noktası ekledi. Bu yaklaşımın sonucunda nihai üretim hattında ilk denemede başarı oranı yüzde 80’in üzerine çıktı. Özellikle kritik bileşenlerde dikkat çekici sonuçlar elde edildi. Batarya üretiminde verimlilik yüzde 99,3 seviyesine ulaşırken toplamda 9.000’den fazla aktüatör üretildi. Şirket ayrıca 500’ün üzerinde robotun sevkiyatını tamamladı. Bununla birlikte üretilen her bir robot, üretim sonrası kapsamlı test süreçlerinden geçiriliyor. 80’den fazla fonksiyonel test, erken arızaları önlemek amacıyla uygulanıyor. Bu testler arasında çömelme ve koşu gibi fiziksel dayanıklılık senaryoları da yer alıyor. Şirketin robot filosu büyüdükçe robotlarda kullanılan yapay zeka modeli Helix için de daha fazla ölçekli veri toplanmış oluyor. Bu da robotların otonom yeteneklerinin geliştirilmesine doğrudan katkı sağlıyor. Robotlarla veri merkezi inşa edecek şirket geliyor 1 ay önce eklendi Ayrıca Figure, robot filosunu yönetmek için uzaktan güncelleme (OTA), servis ve filo yönetim sistemleri geliştirdi. Bu sistemler sayesinde sahadaki robotlar sürekli izlenebiliyor, güncellenebiliyor ve elde edilen geri bildirimler doğrudan geliştirme süreçlerine aktarılabiliyor. Şirket, üretim tarafındaki ilerlemelerin yanı sıra yapay zeka modelinde de önemli bir güncelleme duyurdu. Helix System 0 (S0) adlı modelin yeni versiyonu, robotlara çevreyi algılayarak hareket etme yeteneği kazandırıyor. Önceki sürüm yalnızca robotun kendi eklem hareketlerini ve pozisyonunu algılayan proprioseptif verilere dayanıyordu. Bu durum, merdiven veya engebeli zemin gibi karmaşık ortamlarda hareket kabiliyetini sınırlıyordu. Yeni güncellemeyle birlikte robotlar artık stereo kameralar aracılığıyla elde edilen görsel verileri kullanarak çevrenin üç boyutlu haritasını oluşturabiliyor. Bu sayede robot, bulunduğu ortamı hem “hissedebiliyor” hem de “görebiliyor”. Bu sistemin simülasyon ortamında farklı ve rastgele zemin koşullarında pekiştirmeli öğrenme yöntemiyle uçtan uca eğitildiğinin altı çiziliyor. En dikkat çekici noktalardan biri ise bu öğrenilmiş davranışların, ek bir kalibrasyon gerektirmeden doğrudan gerçek dünyaya aktarılabilmesi oldu. Sonuç olarak Figure 03 robotları artık merdivenleri çıkabilen, farklı zeminlerde dengeli hareket edebilen ve değişken ışık koşullarında stabil performans gösterebilen bir yapıya kavuştu. İnsansı robot Atlas bu kez buzdolabı taşıdı {{Description}} https://www.amazon.com.tr/dp/B0BM62VSHP https://www.amazon.com.tr/dp/B0DT1KLV4H https://www.amazon.com.tr/dp/B0CSNGM6D6 https://www.amazon.com.tr/dp/B09XBTQZF2 https://app.hb.biz/dB52DXc6OZqj https://store.steampowered.com/app/858710/Gravity_Circuit
Images (10): 


|
|||||
| Journal of Medical Internet Research - Human and Robot Assistance … | https://www.jmir.org/2026/1/e94738 | 10 | Jun 02, 2026 00:00 | active | |
Journal of Medical Internet Research - Human and Robot Assistance for Cognitive Load in Younger and Older Adults: Multimodal Within-Subject Experimental StudyURL: https://www.jmir.org/2026/1/e94738 Description: Background: Maintaining cognitive efficiency and independence is a central goal of healthy aging. Socially assistive robots (SARs) are increasingly proposed as scalable digital health solutions to support daily activities in older adults and to facilitate aging-in-place. However, concerns remain regarding whether robot-mediated assistance reduces or inadvertently increases cognitive load, potentially undermining usability, user acceptance, and long-term real-world adoption, particularly in aging populations. Objective: This study aimed to examine how robot-assisted (human-robot interaction [HRI]) and human-assisted (human-human interaction [HHI]) support influences cognitive load during task performance in younger and older adults. A multimodal assessment framework integrating behavioral, subjective, and physiological measures was used to identify age-related differences in cognitive effort and stress associated with different forms of assistance. Methods: A total of 60 healthy adults (30 younger adults: mean age 34.8, SD 10.1 years; and 30 older adults: mean age 72.3, SD 5.5 years) completed a modified Trail Making Test under 7 within-subject conditions: independent performance (baseline), 3 robot-assisted conditions, and 3 human-assisted conditions, each corresponding to low, medium, and high cognitive load levels. Performance accuracy and completion time were recorded as behavioral indicators. Perceived cognitive load was assessed using the National Aeronautics and Space Administration Task Load Index, and physiological stress was evaluated via pre- and postcondition salivary cortisol concentrations. Linear mixed-effects models were applied to examine main effects and interactions of age group, assistance type, cognitive load level, and time. Results: Significant interactions between age group and assistance type were observed for accuracy (=6.50; =.01) and perceived cognitive load (=4.58; =.03). Older adults demonstrated lower accuracy and higher perceived cognitive load during robot-assisted conditions compared with human-assisted conditions, whereas no such differences were observed in younger adults. Across age groups, human assistance improved performance at low and medium cognitive load levels. Physiological analysis revealed a significant age×assistance× time interaction (=5.16; =.02), with older adults showing increased posttask cortisol concentrations during robot-assisted interaction, indicating higher physiological stress. Conclusions: While both human and robotic assistance enhanced task performance relative to independent completion, the type of support critically shaped cognitive load responses in older adults. Robot-assisted interaction was associated with increased behavioral errors, higher perceived workload, and elevated physiological stress, suggesting that current SAR implementations may impose additional extraneous cognitive load in older users. These findings highlight the importance of designing adaptive, age-sensitive digital assistive systems that minimize cognitive burden through simplified interaction, responsive pacing, and multimodal support. Multimodal cognitive load assessment provides a valuable framework for optimizing the usability and effectiveness of assistive digital health technologies for aging populations. Content:
Published on 01.Jun.2026 in Vol 28 (2026) Authors of this article: 1Department of Educational Sciences, University of Catania, Catania, Sicily, Italy 2Kent and Medway Medical School, University of Kent and Canterbury Christ Church University, Canterbury, England, United Kingdom 3Department of Sport Science, School of Science and Technology, Nottingham Trent University, Nottingham, England, United Kingdom 4Department of Computing, Sheffield Hallam University, Sheffield, England, United Kingdom 5School of Health Sciences, University of Southampton, Building 67, Highfield Campus, University Road, Southampton, England, United Kingdom Daniele Magistro, PhD Background: Maintaining cognitive efficiency and independence is a central goal of healthy aging. Socially assistive robots (SARs) are increasingly proposed as scalable digital health solutions to support daily activities in older adults and to facilitate aging-in-place. However, concerns remain regarding whether robot-mediated assistance reduces or inadvertently increases cognitive load, potentially undermining usability, user acceptance, and long-term real-world adoption, particularly in aging populations. Objective: This study aimed to examine how robot-assisted (human-robot interaction [HRI]) and human-assisted (human-human interaction [HHI]) support influences cognitive load during task performance in younger and older adults. A multimodal assessment framework integrating behavioral, subjective, and physiological measures was used to identify age-related differences in cognitive effort and stress associated with different forms of assistance. Methods: A total of 60 healthy adults (30 younger adults: mean age 34.8, SD 10.1 years; and 30 older adults: mean age 72.3, SD 5.5 years) completed a modified Trail Making Test under 7 within-subject conditions: independent performance (baseline), 3 robot-assisted conditions, and 3 human-assisted conditions, each corresponding to low, medium, and high cognitive load levels. Performance accuracy and completion time were recorded as behavioral indicators. Perceived cognitive load was assessed using the National Aeronautics and Space Administration Task Load Index, and physiological stress was evaluated via pre- and postcondition salivary cortisol concentrations. Linear mixed-effects models were applied to examine main effects and interactions of age group, assistance type, cognitive load level, and time. Results: Significant interactions between age group and assistance type were observed for accuracy (F1, 404.53=6.50; P=.01) and perceived cognitive load (F1, 403.45=4.58; P=.03). Older adults demonstrated lower accuracy and higher perceived cognitive load during robot-assisted conditions compared with human-assisted conditions, whereas no such differences were observed in younger adults. Across age groups, human assistance improved performance at low and medium cognitive load levels. Physiological analysis revealed a significant age×assistance× time interaction (F1, 156=5.16; P=.02), with older adults showing increased posttask cortisol concentrations during robot-assisted interaction, indicating higher physiological stress. Conclusions: While both human and robotic assistance enhanced task performance relative to independent completion, the type of support critically shaped cognitive load responses in older adults. Robot-assisted interaction was associated with increased behavioral errors, higher perceived workload, and elevated physiological stress, suggesting that current SAR implementations may impose additional extraneous cognitive load in older users. These findings highlight the importance of designing adaptive, age-sensitive digital assistive systems that minimize cognitive burden through simplified interaction, responsive pacing, and multimodal support. Multimodal cognitive load assessment provides a valuable framework for optimizing the usability and effectiveness of assistive digital health technologies for aging populations. Maintaining independence and cognitive efficiency in daily life constitutes a central objective in the promotion of active and healthy aging [1]. The ability to manage daily activities with adequate support has become a key focus across multiple disciplines, particularly in light of the projected rise in the global mean age over the coming decades [2]. In this context, health and social care systems are increasingly exploring digital health technologies to support autonomy, reduce care burden, and enable aging in place, underscoring the need for scalable and evidence-based interventions aimed at enhancing quality of life among older adults. Technological progress has played a pivotal role in pursuing this goal. Intelligent systems can now be embedded within domestic environments, and embodied agents may be programmed to interact with users to accomplish shared objectives [3]. Within this framework, socially assistive robotics (SAR) leverages human-robot interaction (HRI) to facilitate such activities and to foster autonomy in everyday life [4]. SAR systems are increasingly positioned as interactive digital health interventions, integrating social interaction, guidance, and task support within real-world settings. However, recent evidence indicates that enabling communication with an artificial agent alone is insufficient to ensure effective interaction, particularly in vulnerable groups such as older adults [5]. Beyond demonstrating performance benefits, digital assistive technologies must also be evaluated in terms of usability, acceptability, and sustainability of long-term adoption [6,7]. Interventions that improve task execution but simultaneously increase cognitive or physiological strain may face significant barriers to real-world implementation. From a cognitive ergonomics perspective, cognitive load (CL) represents a critical determinant of HRI effectiveness and of the usability and sustainability of digital health technologies [8]. Conceptually, CL is defined as the amount of mental resources required to perform a given task [9]. Because cognitive resources are inherently limited, individuals must distribute them efficiently across competing activities [10]. Importantly, CL is not a unitary construct but rather comprises three interrelated components: intrinsic, extraneous, and germane load. Intrinsic load stems from the inherent complexity of the task and the volume of information to be processed. Extraneous load arises from the presentation format and the presence of external distractions, both of which can be mitigated through effective task design. Germane load, instead, pertains to the cognitive processes that foster learning and schema construction. Recent theoretical models have proposed integrating intrinsic and germane load, conceptualizing intrinsic and extraneous load as the two principal dimensions of CL theory [11-13]. In applied digital health contexts, extraneous CL introduced by interface design is particularly problematic, as it may negate the intended supportive function of assistive technologies. A growing body of research indicates that older adults face greater challenges in managing CL, thereby affecting their functional autonomy [14]. Such difficulties are often attributed to age-related cognitive decline, which manifests as increased fatigue and reduced efficiency in completing daily tasks [15]. These challenges extend to the use of technology, where the additional cognitive demands associated with complex interfaces further amplify CL [16,17]. Moreover, older adults’ attitudes toward advanced technologies are shaped not only by sociocultural factors but also by individual cognitive needs and the degree of system personalization [18]. Neglecting these factors’ risks imposing additional cognitive burdens and may contribute to digital exclusion among those most in need of support. Despite the growing interest in SAR, few studies have directly compared robot-mediated assistance with human assistance under controlled CL conditions. Such comparisons are essential, as assistive technologies are often implicitly framed as substitutes for human support. Furthermore, assessing technology-assisted performance without an independent baseline condition limits the ability to determine whether observed effects reflect genuine support or task facilitation, as highlighted in previous work [19]. Accordingly, it becomes essential to determine whether technology use increases users’ CL, to identify the features responsible for such increases, and to examine how these effects differ across age groups. Such insights are crucial for the design of adaptive interfaces capable of dynamically accommodating users’ cognitive capacities. Nevertheless, the existing literature presents several methodological limitations in addressing these issues. First, assessing CL during technology use without a baseline condition prevents reliable interpretation. Experimental designs should therefore include a comparison between technology-assisted and independent task performance to delineate the specific benefits and drawbacks of technological aids, a methodological framework exemplified by Varrasi et al [19]. Furthermore, studies asserting the positive impact of technology without incorporating a condition involving human support lack robustness; indeed, multiple aid conditions are required for a comprehensive evaluation. Likewise, hypothesizing user needs without conducting age comparisons constrains the development of genuine person-centered support systems. Specific sampling is thus necessary to enable between-group analyses and to characterize distinct population profiles. Finally, the reliance on a single CL measure limits construct validity, underscoring the need to use multimodal assessment approaches. CL can be quantified through a range of behavioral, subjective, and physiological indicators, each providing complementary information on the cognitive demands placed on the individual. Behavioral indices include performance-based metrics, such as accuracy, error rates, and completion time, which serve as quantifiable markers of cognitive effort [20]. Subjective indices capture self-reported perceptions of mental workload, encompassing aspects such as perceived effort, frustration, and mental demand [21]. Integrating these approaches enables a comprehensive evaluation of cognitive demands and supports the robust assessment of assistive technologies in digital health contexts. Physiological indices, including heart rate variability, pupil dilation, blood and salivary cortisol concentrations, and electroencephalographic (EEG) activity, reflect the body’s physiological responses to cognitive strain and stress [22]. Integrating these methods offers a comprehensive assessment of CL and facilitates a more accurate evaluation of task design and learning efficiency. Given these considerations, this study aimed to investigate whether, and in what ways, HRI and human-human interaction (HHI) influence CL management during task performance in younger and older adults. By incorporating an independent baseline condition and a multimodal psychometric framework, this study seeks to inform the design, evaluation, and deployment of age-sensitive digital assistive technologies. This study used a within-subject, experimental comparative design to examine differences in CL during independent, robot-assisted, and human-assisted task performance in younger and older adults. The study included 60 adult volunteers, comprising 30 younger adults (13 males, 17 females; mean age 34.8, SD 10.1 years) and 30 older adults (12 males, 18 females: mean age 72.3, SD 5.5 years), with sex distribution confirmed as balanced (χ²1=0.07; P=.79). Younger adults were aged 18‐45 years, and older adults were more than 65 years of age. In line with the study aims, age differed significantly between groups (t58=17.86; P<.001). Education levels were broadly comparable across groups. Among younger adults, 16.7% (5/30) reported high school education, 23.3% (7/30) bachelor’s, 30% (9/30) master’s, and 30% (9/30) PhD-level education. Among older adults, 33.3% (10/30) reported high school education, 30% (9/30) bachelor’s, 23.3% (7/30) master’s, and 13.3% (4/30) PhD-level education. Although younger adults showed a tendency toward higher educational attainment, this difference was not statistically significant (χ²3=4.09; P=.25). An a priori power analysis (2-tailed α=.05, 80% power) indicated that the sample size of 30 adults per group provides sufficient power to detect Cohen d∼0.74 for between-group comparisons and interaction effects (approximated as between-group differences in within-subject contrasts). Within-group paired contrasts have 80% power to detect dz∼0.53 (n=30) and dz∼0.37 when considering the full sample (N=60). These estimates represent conservative approximations relative to the mixed-effects modeling approach used in the primary analyses. All participants underwent screening to confirm good general health, as only healthy individuals were included in the study. Specifically, participants had no prior diagnosis of neurological or psychiatric disorders and reported no previous direct experience interacting with socially assistive robots. This sampling strategy was adopted to isolate age-related differences in CL responses under controlled experimental conditions while minimizing additional variability associated with clinical impairment. Accordingly, the study was conceived as an initial step toward understanding how assistance modality influences CL, with the intention of extending this line of research to more vulnerable populations in future work. The study was conducted in accordance with the ethical principles outlined in the Declaration of Helsinki. Ethical approval was obtained from the Nottingham Trent University Ethics Board (reference number 729) in March 2024. All participants provided written informed consent prior to participation and were informed of their right to withdraw at any time without consequence. The cognitive task used in this study was adapted from the B form of the Trail Making Test (TMT) [23]. The TMT was selected over alternative cognitive measures due to its engagement of multiple cognitive domains, including attention, visual search, executive functioning, and working memory. Consequently, the task required participants to simultaneously deploy multiple cognitive skills, closely reflecting the complexity of everyday activities. Specifically, the task used a 29.7×42 cm sheet of paper containing 52 randomly arranged circles (Figure 1). Half of the circles included English letters (A-Z), while the remaining circles contained numbers (1-26). A total of 7 task versions were created to minimize learning effects across repeated conditions. These versions were not intended to represent validated parallel forms of the TMT in a clinical sense; rather, they were task variants inspired by the TMT and designed to evoke comparable executive, attention, and visual search demands. For each version, the 52 circles were randomly distributed across the sheet to create distinct spatial arrangements while preserving the same basic task structure. Task versions were assigned randomly to participants across conditions, with each participant completing a different version in each condition. Objective performance was behaviorally evaluated based on the number of correctly connected pairs and the time required to complete the task (seconds). The supportive agent used in this study was the NAO 6 humanoid robot (United Robotics Group). This platform was selected for its commercial availability and relevance to real-world assistive deployments aligned with the study’s requirements, including speech production, speech recognition, and social interaction. Previous studies have shown that NAO (Aldebaran, Paris, France) functions as an SAR that is generally well-received by older and vulnerable populations [16]. The robot is 58 cm tall and can interact through speech, gestures, and facial tracking. Programming was implemented using Choregraphe software (version 2.8.7; Aldebaran) together with Python (Python Software Foundation) to enable interactive collaboration with participants in 3 of the 7 experimental conditions. The robot’s behavior was structured using block-based visual programming within a node flow interface. Interactions began with NAO tracking the participant’s face to simulate eye contact, followed by a self-introduction and delivery of initial task instructions. Speech recognition allowed the robot to repeat instructions upon participant request during an initial familiarization phase, which served as a vocal adaptation period responsive to participant feedback. After this phase, NAO did not repeat instructions to avoid disrupting task performance, although speech recognition remained active to manage pacing during the interaction. Indeed, the robot-participant interaction followed a structured and standardized dialogue logic designed to ensure consistency across participants while maintaining naturalistic turn-taking dynamics. Specifically, interaction sequences were organized into alternating robot-led instruction phases and participant execution phases. The robot presented task instructions verbally according to predefined scripts and advanced through task steps only after receiving explicit verbal confirmation from the participant (eg, “Okay” or “Done”), thereby regulating the interaction rhythm. The presentation of task instructions varied systematically according to CL conditions. In the low-load condition, the robot delivered one pair of items at a time, whereas in the medium- and high-load conditions, multiple pairs were provided sequentially within a single instruction block. The interaction pacing was therefore partially scripted, with fixed instruction sequences, but temporally modulated by participant responses, allowing limited responsiveness to individual execution speed. To ensure procedural reproducibility, the interaction logic combined fixed scripted content (instruction wording, sequence structure, and load manipulation) with controlled interaction triggers based on participant verbal feedback. A schematic representation of the interaction workflow is provided in Figure 2. The flowchart illustrates the decision nodes governing instruction delivery, response confirmation, and transition between interaction phases, providing a visual representation of the standardized dialogue protocol implemented across conditions. Moreover, to enhance transparency and reproducibility of the interaction protocol, a structured overview of the robot dialogue architecture, including interaction phases, scripted instruction templates, and response-triggered transitions, is provided in Table 1. Perceived cognitive load (PCL) was assessed using the National Aeronautics and Space Administration Task Load Index (NASA-TLX) [24], a brief, self-administered psychometric tool evaluating 6 dimensions: mental demand, physical demand, temporal demand, performance, effort, and frustration. Each dimension was rated on a 20-point scale, with higher scores indicating greater perceived strain. The NASA-TLX was chosen for its robust psychometric properties and demonstrated superiority over alternative subjective workload measures [25], making it well-suited for assessing PCL in this study. In line with the primary aim of capturing overall perceived workload during assisted task performance, the total NASA-TLX score was used as a global indicator of subjective CL. Although the instrument allows examination of individual workload dimensions, the aggregated score has been widely used to provide a comprehensive estimate of perceived task demand, particularly in applied human-technology interaction research [25]. To objectively assess physiological stress responses associated with the CL tasks, saliva samples were collected immediately before and after each condition (ie, robot-assisted and human-assisted). Samples were obtained using a synthetic swab (Salivette Cortisol, Sarstedt), instructing participants to slowly move the swab around the oral cavity for 2 minutes, in accordance with the manufacturer’s instructions. All samples were maintained on crushed ice throughout testing, which did not exceed 45 minutes. Subsequently, saliva samples were centrifuged at 1000×g for 2 minutes (Espresso Microcentrifuge, Thermo Scientific), and the supernatant was transferred into 1.5 mL Eppendorf tubes and stored at −80 °C until analysis. Quantitative determination of salivary cortisol concentrations was performed using commercially available enzyme-linked immunosorbent assay kits (Salimetrics), following the manufacturer’s recommended procedures. Salivary cortisol was included as a physiological indicator of stress-related arousal associated with cognitive effort. While cortisol does not represent a direct measure of CL, it provides complementary information regarding the neuroendocrine response to task-related strain, allowing integration with behavioral and subjective workload indicators. Moreover, salivary cortisol was sampled only before and after each assisted block, and not after the independent baseline condition, because the physiological outcome was intended to capture the cumulative response associated with the two assistance modalities rather than transient changes across individual CL levels or during unassisted performance. This choice was based on both theoretical and methodological considerations, including the temporal dynamics of the hypothalamic-pituitary-adrenal axis, as salivary cortisol typically peaks approximately 20‐40 minutes after stress onset. Accordingly, cortisol was treated as a block-level marker of stress-related arousal, and restricting sampling to the assisted conditions helped reduce participant burden while preserving the feasibility and ecological validity of the experimental protocol. Each participant completed the experimental protocol individually across seven conditions: one baseline condition performed independently, three robot-assisted conditions at varying CL levels (low, medium, and high), and three human-assisted conditions corresponding to the same CL levels. The baseline condition was systematically administered at the beginning of the session to provide a common, unassisted reference point for all participants. Within each assisted block, CL levels were presented in a fixed progressive sequence (low, medium, and high) in both the robot-assisted and human-assisted conditions. This choice was made to ensure a gradual and controlled increase in task demands, thereby minimizing potential confusion associated with abrupt changes in difficulty and maintaining a stable and predictable interaction structure, particularly for older adults. In contrast, the order of the assisted blocks (robot-assisted vs human-assisted) was fully counterbalanced across participants to control for order effects at the level of assistance modality. Both assisted conditions were administered within the same experimental session. Consequently, the precondition saliva sample for the second assisted block was collected immediately before its onset, following completion of the preceding condition and a brief transition phase required to reset the materials and prepare the subsequent task. While counterbalancing mitigates systematic sequence effects at the level of condition order, the absence of an extended washout interval implies that a residual carryover influence from the first assisted condition on the precondition cortisol value of the second block cannot be entirely excluded. The total duration of the experimental session was approximately 30 minutes. After providing informed consent, the participant was seated at a desk and presented with the first task sheet. In the baseline condition, the participant was instructed to connect alternating numbers and letters in reverse order (ie, starting from the highest number and the last letter) as quickly and accurately as possible using a marker. This task was designed to elicit CL by engaging multiple cognitive domains, including semantic memory, working memory, visual search, and processing speed. Specifically, the participant was required to recall the reverse sequence of alphanumeric items, maintain this sequence in working memory, and identify and connect the corresponding circles on the sheet. During the three robot-assisted conditions, the NAO humanoid robot acted as an interactive support agent (Figure 3). At the beginning of each assisted condition, the robot greeted the participant, introduced the task, and repeated the instructions upon request. Throughout task execution, the robot verbally provided the pairs of circles to be connected, thereby reducing reliance on semantic memory and allowing participants to focus on visual search and motor coordination. The robot advanced through the sequence based on participant responses, waiting for a verbal confirmation (eg, “Okay”) before announcing the next pair. To prevent learning effects, the sequence of pairs was randomized across trials. CL was systematically manipulated as follows: in the low-load condition (second and fifth condition), the robot presented one pair at a time; in the medium-load condition (third and sixth condition), two to four pairs were provided simultaneously; and in the high-load condition (fourth and seventh condition), five to seven pairs were delivered concurrently. The robot did not repeat any pair throughout the session. The human-assisted condition was administered by a trained experimenter who followed a standardized script designed to mirror the robot-assisted protocol in content, sequence, and CL manipulation. The experimenter delivered the instructions verbally using the same wording as the robot prompts, maintained the same load-specific structure, and waited for the same participant verbal confirmations before proceeding to the next step. A brief initial familiarization phase was also included to ensure procedural parity with the robot-assisted condition: during this phase, the experimenter presented the task instructions and allowed participants to request clarification, analogous to the vocal adaptation period implemented in the HRI condition. Following familiarization, the interaction proceeded according to the predefined script without additional instruction repetition. The only difference between conditions was the modality of delivery, with all other procedural elements held constant. A structured overview of the human-assisted dialogue, emphasizing the fidelity rules for the adherence to the HRI condition, is provided in Table 2. At the end of each condition, including baseline, robot-assisted, and human-assisted tasks, participants completed the NASA-TLX questionnaire to evaluate PCL. As described previously, saliva samples were collected at the beginning and the end of both the robot-assisted and human-assisted conditions to capture physiological markers of CL, yielding four samples per participant. For data analysis, two independent experimenters (SV and RV) assessed task performance across all conditions. Performance measures included accuracy (number of correctly connected pairs) and completion time (in seconds). Subjective workload was quantified using NASA-TLX scores, while physiological responses were evaluated by comparing pre- and postcondition cortisol concentrations across the robot- and human-assisted settings. Linear mixed-effects models were applied using restricted maximum likelihood estimation to examine differences across the primary outcome variables, including NASA-TLX scores, task performance indices, and cortisol responses. Participants were included as random intercepts to account for interindividual variability in baseline performance and physiological measures. A type III ANOVA with Satterthwaite approximation was used to assess the main effects and interactions of condition (robot-assisted vs human-assisted), CL level (baseline, low, medium, and high), and age group (younger vs older adults). Condition at varying load levels was modeled as a within-subject factor, while age group was treated as a between-subject factor. Post hoc comparisons were performed on estimated marginal means and mean differences (Mdif) to further explore significant main effects and interactions. Tukey-adjusted estimated marginal means comparisons were used to correct for multiple testing. In line with the study’s objectives, particular attention was devoted to the interaction between age group and experimental condition to clarify differential patterns of CL management and task performance across age cohorts. Mean (SD) values for accuracy (number of correctly matched pairs), completion time (in seconds), and PCL across the seven experimental conditions, as well as cortisol levels (nmol/L) measured before and after the robot-assisted and human-assisted conditions, are presented in Tables 3 and 4. aPCL: perceived cognitive load. bCL: cognitive load. aCortisol levels (nmol/L) were measured at the beginning (pre) and end (post) of the human-human interaction and human-robot interaction conditions. Regarding performance, analysis of accuracy revealed significant interactions between age group and condition (F1, 404.53=6.50; P=.01) as well as between age group and CL level (F3, 403.45=5.88; P<.001). Post hoc comparisons indicated that older adults exhibited lower accuracy in the HRI condition compared with younger adults (Mdif=1.97, SE=0.58; t106=3.34; P=.001; Figure 4A) and also relative to the human-assisted condition (Mdif=1.54, SE=0.43; t403=3.57; P<.001; Figure 4B). Additionally, older adults demonstrated significantly lower accuracy than younger adults at medium (Mdif=2.75, SE=0.73; t219=3.75; P<.001) and high CL levels (Mdif=1.64, SE=0.73; t219=2.23; P=.03), whereas no significant differences were observed at low load (Mdif=1.16, SE=0.73; t219=1.58; P=.12) or in the baseline condition (Mdif=−0.80, SE=0.73; t217=−1.09; P=.27; Figure 4C). A significant interaction between condition and CL level was also observed (F1, 403.45=5.83; P<.001). Across all participants, post hoc tests revealed higher accuracy in the human-assisted compared with the robot-assisted condition at low (Mdif=1.25, SE=0.61; t404=2.05; P=.04) and medium CL levels (Mdif=2.58, SE=0.61; t404=4.21; P<.001), whereas no significant differences emerged at high CL (Mdif=−0.79, SE=0.61; t404=−1.29; P=.19; Figure 4D). Analysis of task completion time revealed a significant interaction between age group and CL level (F3, 402.85=23.73; P<.001). Post hoc comparisons indicated that younger adults completed the task faster than older adults at baseline (Mdif=−123.73, SE=18.70; t114=−6.62; P<.001), as well as under low (Mdif=−115.95, SE=18.70; t115=−6.19; P<.001) and medium CL conditions (Mdif=−75.16, SE=18.70; t115=−4.01; P<.001). No significant difference was observed at high CL (Mdif=1.73, SE=18.70; t115=0.09; P=.92; Figure 5). Analysis of NASA-TLX scores revealed significant interactions between age group and condition (F1, 403.45=4.58; P=.03) as well as between age group and CL level (F3, 403.12=8.53; P<.001). Regarding the interaction between age group and condition, post hoc comparisons showed that older adults reported significantly higher scores during the robot-assisted condition (mean 57.60, SE 2.13) compared with the human-assisted condition (mean 54.3, SE 2.13), with an estimated Mdif of −3.29 (SE=1.16; t403=−2.83; P=.005). No significant difference was observed in younger adults (Mdif=0.25, SE=1.18; t404=0.21; P=.83), indicating that older adults experienced greater perceived CL when interacting with the robot compared with human support (Figure 6A). For the interaction between age group and CL level, post hoc analysis revealed that older adults reported significantly higher total scores at the low CL level (mean 43.8, SE 2.28) compared with younger adults (mean 37.2, SE 2.29; Mdif=−6.63, SE=3.23; t89.0=−2.05; P=.04), suggesting that older adults perceive more CL than younger adults under low-load conditions (Figure 6B). Analysis of the physiological measure of salivary cortisol concentration revealed a significant interaction between age group, condition, and time (pre vs post; F1, 156=5.16; P=.02). When analyzed separately by age group, older adults demonstrated a significant interaction between condition and time (F1, 156=10.32; P=.001), whereas younger adults showed no significant effect (F1, 156=0.01; P=.90). Post hoc comparisons indicated that older adults exhibited a significant increase in cortisol concentrations from baseline to postintervention during the HRI condition (Mdif=−5.65, SE=1.31; t156=−4.31; P=.001; Figure 7). This study aimed to investigate how HHI and HRI support the management of CL during task performance in younger and older adults, integrating behavioral, subjective, and physiological measures. By including a baseline condition without assistance and systematically varying CL levels, this research extends the literature on cognitive ergonomics in aging and technology-assisted contexts by providing an applied evaluation of assistive support modalities that are increasingly proposed as digital health solutions for aging populations. Importantly, these findings should also be interpreted within a translational digital health perspective. While assistive technologies are frequently evaluated in controlled experimental settings, their successful implementation depends on sustained usability, user acceptance, and ecological integration into daily routines. In this context, increases in CL or physiological load, even when accompanied by performance improvements, may represent critical barriers to long-term engagement and adherence. Consequently, evaluating assistive systems through a multidimensional framework that captures both performance outcomes and user burden is essential to inform scalable and sustainable deployment strategies. Consistent with previous evidence indicating age-related declines in processing speed and working memory capacity [26,27], older adults demonstrated lower accuracy and required more time to complete tasks as CL increased. These differences were most pronounced at medium- and high-load levels, supporting theoretical frameworks positing that increased task complexity disproportionately affects older adults due to age-related cognitive changes [28]. Notably, at low CL levels, accuracy differences between age groups were reduced, suggesting that minimal task demands may better align with preserved cognitive capacities in older adults, enabling performance comparable to that of younger adults. Importantly, these findings reinforce the need to evaluate assistive technologies for older adults not only under simplified or optimal conditions, but also across varying levels of cognitive demand that more closely reflect real-world task complexity. The interaction between type of assistance and CL revealed that HHI generally supported higher accuracy compared with HRI, particularly at low- and medium-load levels. This finding aligns with research suggesting that human support can more flexibly and adaptively accommodate the nuanced needs of older adults, thereby reducing extraneous CL [29]. The absence of significant accuracy differences between HRI and HHI at high CL may tentatively reflect a ceiling effect, whereby performance approached an upper limit, reducing sensitivity to differences between assistance modalities. However, this interpretation should be treated with caution, as performance saturation was not formally tested in this study. Subjective measures of PCL, assessed via NASA-TLX scores, indicated that older adults consistently reported higher CL during HRI compared with HHI, particularly under low-load conditions. This finding is especially relevant from a usability and adoption perspective, as increased perceived workload under otherwise manageable task demands may negatively influence trust, acceptance, and sustained engagement with assistive technologies. This result suggests that even minimal interactions with robotic agents can impose additional extraneous cognitive demands for older adults, potentially due to challenges in speech recognition, turn-taking, or the social-cognitive demands of interpreting robotic behavior [30]. It is important to acknowledge that certain technical constraints are inherent to current HRI systems. Features such as response latency, variability in speech recognition, and predefined interaction pacing represent realistic operational characteristics of SARs rather than limitations of the experimental design. These factors may require users to allocate additional attentional and executive resources to manage turn-taking and system feedback, thereby contributing to increased extraneous CL. Such demands may be particularly relevant for older adults, who may be more sensitive to temporal unpredictability and reduced interactional flexibility. Recognizing these constraints as ecological features of present technologies highlights key targets for future system refinement, including more robust speech processing and adaptive interaction pacing, which may ultimately improve usability and reduce cognitive burden. By contrast, younger adults showed no differences in PCL between assistance types, suggesting that HRI may be more readily accommodated by individuals with higher baseline cognitive flexibility and greater familiarity with technology [31]. Physiological measures of salivary cortisol concentrations corroborated these findings, revealing increased cognitive strain during HRI for older adults, with significant postintervention elevations observed in the HRI condition. This is consistent with prior literature demonstrating heightened physiological reactivity in older adults to tasks perceived as challenging or unfamiliar [32]. The convergence of behavioral, subjective, and physiological indicators strengthens the interpretation that HRI, in its current form, may elicit latent stress responses in older users that are not fully captured by performance metrics alone, underscoring the value of multimodal assessment frameworks in digital health evaluation. Indeed, the use of the total NASA-TLX score allowed the capture of participants’ global perception of workload across interaction modalities, providing an ecologically valid estimate of overall task burden. Complementarily, cortisol responses were interpreted as markers of physiological stress associated with cognitive effort rather than direct indicators of CL per se. The consistency of these measures supports a multidimensional interpretation of user strain during assistive interaction. The absence of similar effects in younger adults underscores the differential impact of HRI on cognitive stress across age groups and highlights the importance of integrating physiological, subjective, and performance-based measures to comprehensively assess CL. Together, these findings highlight the complex interplay among aging, CL management, and the type of assistance provided during task performance. Previous research on behavioral and cognitive-affective regulation has similarly emphasized the need for individualized and context-sensitive approaches in psychological assessment and intervention [33,34]. Within the context of assistive digital technologies, these results suggest that “one-size-fits-all” interaction models are unlikely to meet the needs of older adults with heterogeneous cognitive profiles. While robotic assistance offers scalable and consistent support, its current implementation may inadvertently increase extraneous CL for older adults, particularly in tasks requiring social-cognitive engagement. In contrast, human assistance appears to mitigate these challenges, supporting better performance and lower perceived strain under comparable task demands. From a digital health design and deployment perspective, these findings suggest that SAR systems should prioritize the minimization of extraneous CL through simplified interaction structures, improved speech recognition robustness, and adaptive pacing strategies that respond to individual user performance and stress indicators. Incorporating real-time or near–real-time indicators of CL could enable dynamic adjustment of assistance, reducing unnecessary cognitive strain and improving user experience. Moreover, hybrid models that combine robotic assistance with intermittent human support may represent a pragmatic transitional approach, particularly in early stages of adoption or in cognitively demanding tasks. These considerations are particularly relevant for large-scale implementation strategies, where technologies must remain cognitively sustainable across prolonged and repeated use in real-world environments. Beyond implications for system design and deployment, this study also offers methodological insights that strengthen the interpretation of technology-assisted CL effects. Importantly, the inclusion of an independent baseline condition in this study strengthens the interpretation of the observed effects by enabling direct comparison between assisted and unassisted task performance. This design feature allows differentiation between genuine support-related benefits and task facilitation effects that may arise simply from external guidance, irrespective of the modality of assistance. By contextualizing both human and robotic assistance against independent performance, the findings demonstrate that while assistance generally improves task outcomes, the cognitive and experiential costs associated with different support modalities vary substantially, particularly for older adults. An additional methodological strength is that the human-assisted condition was operationalized through a standardized script matched to the robot-assisted protocol in wording, sequencing, and load manipulation. This design choice reduced the risk that differences between conditions were attributable to variability in human delivery style rather than to the assistance modality itself. This comparative framework enhances internal validity and provides a more robust basis for evaluating assistive technologies as potential substitutes or complements to human support in real-world digital health contexts. The observed interaction patterns suggest that technological interventions designed for older adults should prioritize reducing extraneous CL by simplifying robot interfaces, improving speech recognition accuracy, and implementing adaptive pacing tailored to individual users. Indeed, although older adults view social robots as a potential tool to support their daily activities, our results further highlight the importance of designing such systems according to users’ specific needs [5]. Additionally, multimodal support strategies, including visual cues and simplified verbal prompts, may enhance the usability and effectiveness of HRI by aligning it more closely with the cognitive profiles of older adults. This study suffers from some limitations. For instance, the generalizability of these findings. Although the inclusion of healthy younger and older adults allowed us to examine age-related differences under controlled conditions, the results cannot be directly generalized to more vulnerable groups, such as individuals with mild cognitive impairment or other clinical conditions for whom SARs may be particularly relevant. Future studies should therefore replicate this design in clinical and functionally vulnerable populations to determine whether the observed patterns of behavioral, subjective, and physiological response are preserved, attenuated, or amplified in contexts of greater cognitive vulnerability. Then, the seven task versions were not formally tested for equivalence in difficulty. Accordingly, they should not be interpreted as psychometrically validated parallel forms of the TMT. Although random assignment of versions across participants and conditions was used to reduce systematic version effects and support internal validity, residual differences in difficulty between task versions cannot be entirely excluded. Future studies should include formal equivalence testing of task variants or adopt a fully validated parallel-form procedure if the task is to be used repeatedly across conditions. A further methodological consideration concerns the fixed progression of CL levels within each assisted block. Although this approach ensured a controlled and gradual increase in task demands and supported procedural consistency across participants, it does not allow complete separation of CL effects from potential sequence effects. Future studies may benefit from counterbalancing or randomizing load sequences, although such designs should carefully consider the potential impact of increased task-switching demands, particularly in older populations. An additional limitation concerns the interpretation of the nonsignificant differences in accuracy between conditions at high CL. Although a ceiling effect may provide a plausible explanation, this possibility was not directly tested through specific analyses of performance saturation. As such, this interpretation should be considered tentative, and future studies should include measures or analytical approaches specifically designed to detect ceiling effects. Moreover, the sequential structure of the assisted blocks should be considered when interpreting the cortisol findings. The order of robot-assisted and human-assisted conditions was fully counterbalanced, which reduced the likelihood that the results were driven by presentation order. However, because the precondition cortisol sample for the second block was collected immediately after completion of the first assisted condition, a residual carryover effect cannot be completely excluded. This limitation is particularly relevant for salivary cortisol, given its temporal dynamics and slower recovery profile. Future studies may benefit from longer recovery intervals or separate-session administration to further reduce potential carryover effects while preserving the advantages of counterbalanced designs. Another important methodological consideration is that salivary cortisol was assessed only in the assisted conditions and at the block level, whereas behavioral and subjective outcomes were collected across all load levels, including baseline. Consequently, the physiological findings should be interpreted as reflecting differences between robot-assisted and human-assisted interaction, rather than as load-specific effects or as changes relative to the independent baseline condition. This design choice was consistent with the intended use of cortisol as a cumulative marker of stress-related arousal; however, it also limits direct comparison between physiological and other outcome domains and should be considered when interpreting the multimodal findings. Future research should examine longitudinal exposure to robotic systems to determine whether increased familiarity reduces cognitive and physiological strain in older adults, potentially enhancing acceptance and efficacy. Such work is essential to distinguish short-term novelty or learning effects from stable interaction patterns that are likely to emerge during real-world deployment. Expanding physiological monitoring to include measures such as heart rate variability and electroencephalography could further elucidate the real-time cognitive dynamics associated with HRI and HHI across age groups. In conclusion, this study provides important evidence regarding CL management in aging populations within assisted task contexts, emphasizing the need to tailor support strategies to individual cognitive capacities. While HRI holds promise for facilitating aging-in-place initiatives, its effectiveness depends on careful interaction design and adaptive support mechanisms that ensure robotic assistance reduces, rather than amplifies, cognitive and physiological burden. Optimizing these systems is critical to supporting autonomy, usability, and quality of life in the context of active aging. Although both HHI and HRI improved performance compared with independent task completion, the effectiveness of assistance was strongly dependent on the type and complexity of support, particularly in older adults. Human assistance consistently supported higher accuracy and lower perceived workload, whereas robotic assistance, despite its promise for scalable and consistent support, was associated with increased perceived and physiological CL in older adults, especially under low and medium task demands. Overall, these findings highlight the importance of designing adaptive, age-sensitive digital assistive systems that minimize cognitive burden through simplified interaction, responsive pacing, and multimodal support. Importantly, even when assistive technologies improve task performance, increases in CL or physiological load may limit usability, scalability, and sustainable real-world deployment in aging populations. By demonstrating the value of multimodal CL assessment and tailored support strategies, this study provides actionable evidence to guide the design, evaluation, and deployment of assistive technologies that genuinely promote autonomy and quality of life in the context of active aging. Acknowledgments The authors would like to acknowledge all the participants who voluntarily took part in the study. This work was supported by the Engineering and Physical Sciences Research Council and National Institute for Health and Care Research funds (grant number EP/W031809/1, IMACTIVE). The data presented in this study are available at [35]. Conceptualization: DM, ADN, JH, and SCMethodology: SV and DMSoftware: SVFormal analysis: RVData curation: SVWriting - original draft preparation: SV, RV, and NCWriting - review and editing: JH, SC, ADN, and DMSupervision: DM and SCFunding acquisition: DM and ADN Conceptualization: DM, ADN, JH, and SC Methodology: SV and DM Software: SV Formal analysis: RV Data curation: SV Writing - original draft preparation: SV, RV, and NC Writing - review and editing: JH, SC, ADN, and DM Supervision: DM and SC Funding acquisition: DM and ADN None declared. None declared. Edited by Matthew Balcarras; submitted 06.Mar.2026; peer-reviewed by Gabriele Pesimena, Simona Massimino; final revised version received 09.Apr.2026; accepted 09.Apr.2026; published 01.Jun.2026. © Simone Varrasi, Roberto Vagnetti, Nicola Camp, John Hough, Alessandro Di Nuovo, Sabrina Castellano, Daniele Magistro. Originally published in the Journal of Medical Internet Research (https://www.jmir.org), 1.Jun.2026. This is an open-access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work, first published in the Journal of Medical Internet Research (ISSN 1438-8871), is properly cited. The complete bibliographic information, a link to the original publication on https://www.jmir.org/, as well as this copyright and license information must be included. Please cite as: Varrasi S, Vagnetti R, Camp N, Hough J, Di Nuovo A, Castellano S, Magistro D Human and Robot Assistance for Cognitive Load in Younger and Older Adults: Multimodal Within-Subject Experimental Study J Med Internet Res 2026;28:e94738 doi: 10.2196/94738 PMID: 42224389 Journal of Medical Internet Research ISSN 1438-8871 Copyright © 2026 JMIR Publications
Images (10): 
|
|||||
| Why people hate humanoid robots | https://unherd.com/2026/06/why-people-h… | 10 | Jun 01, 2026 08:00 | active | |
Why people hate humanoid robotsURL: https://unherd.com/2026/06/why-people-hate-humanoid-robots/?edition=us Content:
The 'Neo' robot deliberately falls short of realism. (Handout) The 'Neo' robot deliberately falls short of realism. (Handout) At Cooper’s Brewery in Adelaide, the largest family-owned brewing business in Australia, forklifts glide around the sizable factory floor. With ease, they shelve boxes of lagers and ales. But nobody is at the wheel. In fact, there isn’t a wheel at all. Or a seat. These forklifts are automated guided vehicles (AGVs), a pretty old form of robotics that uses lasers, floor markers or other navigation systems to follow pre-planned paths. People had always imagined that robots would look like us, but these forklifts hint at a different future — one in which robots are made in the image of the work, not the worker. For the question of whether robots will be the same shape as humans is not a settled one. In fact, it is a point of some debate in the robotics sector. Elon Musk promises legions of humanoid Tesla robots, poised to take over manual labor and build a colony on Mars. And his is not a particularly wacky view; other executives, including those less given to overconfident predictions, have made similar forecasts. In his lecture delivered to the Cosmos Institute last month in Oxford, the Anthropic co-founder Jack Clark predicted that, by April 2028, bipedal robots will “begin to do useful work in the real world in partnership with human tradespeople”. While being bipedal does not mean a robot is identical to a human, it certainly denotes it being closer in form to us than to a forklift. As recently as this time last year, a wide rollout of electronic colleagues looked unlikely. Even in China, the world leader of the humanoid robotics market, the stumbling and malfunctioning first cohort of robot competitors in the Beijing half-marathon were treated as more of an entertaining sideshow than a serious sign of things to come. Clark himself appeared relatively pessimistic about the capabilities of humanoid robots at the time; in response to an Amazon research paper about the performance of a specialized robotics system for stowing items in the company’s warehouses, he noted that state-of-the art automation was coming from designing highly specific hardware and “carefully structuring your system around a few core tasks”. The experiment, he wrote, “should temper our expectations for bipedal robots leading to some massive improvement in automation — at least in the short term.” What changed? It may simply be that this massive improvement has arrived. At this year’s Beijing half-marathon, several robots outpaced human participants, even breaking records. This feat had serious implications, demonstrating the kind of durability that might soon make the technology suitable for industrial applications. On that basis, Clark’s prediction — that more human-like machines will start trickling into the workforce next year — starts to sound plausible, though we can expect humans would still be on-site to correct for their defects. Manual labor will be slowly automated. Or it may be that Clark believes the underlying AI systems are becoming so powerful, so fast, that the obstacles will be swept away. The robots’ cognitive abilities will catch up with their strength and dexterity. Manual labor will be rapidly automated. “Truly general intelligence would obviate some of the flaws,” Clark wrote in his sceptical 2025 missive. “So if bipeds arrive at the same time as a generally capable intelligence, I’ll need to eat my words.” This is now the precipice at which we find ourselves. As AI improves, those in the field say robots will become more capable of learning for themselves, of adapting to new environments without pre-programming, and even employing reasoning. They’ll be easily able to work in an Amazon warehouse — and then some. The ultimate prize, as Clark says, would be truly general intelligence: a system that can turn its hand to any task without specific training. Many imagine that, in this scenario, the machine most suited to carrying around a general, human-like intelligence would be in the shape of a person. After all, the world is built for humans, and humans have the dexterity to adapt to a vast range of manual tasks. Many industrial robots, by contrast, are made to complete one specific task from a set point. Or else they operate entirely inside facilities built for them: look, for example, at the fulfillment centers of British grocery delivery giant Ocado, where a “hive” of robots roll across a grid system, picking and packing orders. The question is whether the economy will demand robots that can venture into unexpected environments. For this, humans are far more adaptable, taking on stairs and uneven terrain. We climb ladders and traverse scaffolding and even rooftops. It’s hard to imagine a machine able to do all that if it isn’t shaped like us. Clark is probably correct that the bipedal assistants will arrive sooner rather than later, precisely because they might be a stopgap between human work and a totally different way of making things. The trades of the future could look more like the work of British startup Automated Architecture, which makes mobile, robotic micro-factories that can build pre-fabricated components of a house quickly and closer to its final site. Inside the micro-factory, one large robotic arm performs tasks that might typically require several different production lines, producing floors, walls and roofs. Human workforces are still needed to assemble the timber-frame panels, but the process minimizes how much construction is needed on-site by pre-making all the elements for the shell of a building. Think of it like buying a gingerbread house kit instead of baking all the pieces from scratch. In this way, the robotics of industry can go beyond the human approach to a task. Why climb a ladder when you could send a drone? These are already used for surveys and roof inspections. With the right dexterity, perhaps they will be able to perform the fixes as well. Humanoids, argues Josef Chen, the founder of London-based restaurant industry robotics firm Kaikaku AI, are like the equivalent of a pick-up truck on a construction site. “Even though it’s not used for any serious work, people just have it for optionality.” In this analogy, you turn to a digger for digging, a crane for lifting. You wouldn’t expect the truck to do those specialist tasks, even though it can be useful for transportation, towing, or navigating tricky ground. Those who believe in the utility of the human-shaped robot, though, believe that getting it right could unlock huge gains — and huge threats to the human workforce. As Clark wrote back in 2023, “true economic growth from AI happens when you don’t need to design for robots”. If an army of person-shaped droids start arriving in human workplaces, with no adjustments needed for them, it is easy to envision how this would accelerate workforce displacement. Matvey Boguslavskiy, a hardware researcher and director of the Society of Technological Advancement, doesn’t buy that. “I think the future economy is going to have robots with many different form factors, doing many different things,” he says. Indeed, if robot arms or vehicles or dog-like quadrupeds prove vastly more efficient than humans, the argument about whether the world has to be redesigned for robots falls flat: the economic incentive will be enough to justify a redesign. By Alys Key So if applications in the workplace favor the specialized machinery end of the robotics scale, then perhaps the promise of the humanoid robot is in the home. Whereas a factory might have space for several machines, each built for a different purpose, homes are more cramped. It would be difficult and expensive to accommodate an ironing robot, a cooking robot, a gardener robot, and so on — but what if they were all rolled into one? . But here the robots will encounter another obstacle: human disquiet. There is something freakish about Tesla’s Optimus, or Boston Dynamics’ Atlas. The way they are lined up like an army in some promotional videos doesn’t help. It’s also in how close they are to being human-shaped, yet how far, almost like there’s a real person under there wearing a creepy costume. It’s the almost-ness that gets you. The heads are almost the right size, the hands almost lifelike — if often clothed in serial killer black gloves. It may be that we’re too conditioned by science fiction horrors to accept humanoid robots. But the reason those fictional visions terrify us in the first place is because they tap into a primal fear — of a monster, or döppelganger. To make robotics more palatable in the home, many companies are making devices less threatening by ramping up their apparent cuteness. Pixar has a lot to answer for here. Everyone I speak to on this subject cites Wall-E and the success the animation studio had in making a boxy, metal robot into a lovable character. One startup robotics lab even brought in Toy Story screenwriter Alec Sokolow as creative director when developing Ongo, a smart desk lamp with big, Disney-worthy eyes. There seems to be strong consumer demand for such devices, at least among gadget obsessives. There are countless Kickstarters for small robotic companions and widgets that receive hundreds of thousands of dollars in advance orders. However, an interactive paperweight can only do so much. To load the dishwasher, you need grip, spatial reasoning, and a way to get high enough to open or close it. If we really want a smoother life with no chores, there would seem to be few options beyond either hiring another human to help or letting humanoids into the home. What’s the way forward? Boguslaviskiy thinks one of the most useful forms will be the small, wheeled vehicle. We have already seen these catch on for vacuuming and mowing lawns autonomously. Why not for other tasks too? Or if the human shape proves useful, the most acceptable forms might be some compromise between the humanoid and the cute. Take a look at Fauna Robotics, a New York-based company which was acquired by Amazon in March. Their products are deliberately fun to look at, with bright colors and jaunty eyebrows. Crucially, they avoid uncanny valley reactions by not trying to make the robot — named Sprout — look too human. It has Lego-like hands and a head that resembles a Wi-Fi modem. It looks like what it is: a machine. Sprout is also small, at 107cm tall, so won’t tower menacingly over a child. Or there’s Memo, from California-based Sunday Robotics. Sometimes described as humanoid, the robot nevertheless does away with cumbersome feet, instead rolling around on wheels. With its permanent baseball cap, it looks more like a character in a children’s film than a chilling centurion of the future. These non-threatening interfaces serve a deeper purpose than just saving children a fright. They strive to make it possible for us to live alongside intelligent machines. Though AI continues to seep into life and work, there are still many people who avoid using the technology or even encountering it as much as possible. When AI enters the physical world, it becomes less easy to ignore, and triggers in some people a sense of revulsion and anger. We have seen this in the repeated attacks on delivery robots and driverless cars. People in the tech industry who delight in the miracle of creating motion, who have fun hacking together hardware projects on the side, perhaps underestimate how far there is to go on public acceptance of robots. Creepy, faceless, six-foot Cybermen are probably not going to help. Alys Key is a freelance journalist who covers technology, business and policy. She writes the UK 2.0 newsletter on Substack. Δ Δ We welcome applications to contribute to UnHerd – please fill out the form below including examples of your previously published work. Please click here to submit your pitch. Please click here to view our media pack for more information on advertising and partnership opportunities with UnHerd.
Images (10): 



|
|||||
| The Sound Of Robots | https://sonicstate.com/news/2026/05/29/… | 9 | Jun 01, 2026 00:00 | active | |
The Sound Of RobotsURL: https://sonicstate.com/news/2026/05/29/the-sound-of-robots/ Description: BOOM Library releases MECHS & ROBOTS sound effects library Content:
BOOM Library has released MECHS & ROBOTS, which they describe as a professional sound effects library built to solve a problem every mech sound designer knows: starting from scratch on every project because nothing in your library was built to work together at scale. Here's the details direct from the company... Eight fully designed robot characters across four size classes share a single design language, so a Microbot and a Titan can coexist in the same session and occupy the same sonic space cleanly. The Construction Kit provides the source material to extend any character or build new ones, giving sound designers a complete mechanical design system in a single library. MECHS & ROBOTS is available in three editions: Designed, Construction Kit, and Bundle. About The Library The Designed edition contains eight fully realised robot characters: Microbot and Nanotron (Small), Android, Automaton, and Summoner (Medium), Gunbuster, Colossus, and Titan (Large), plus Extra Large characters. Each includes 12 sound categories and up to 57 individual variations. Sound categories include Footstep, Movement, Bodyfall, Damage Impact, Transform, Dismantle, Calculate, Expression, Rotation, Power Up, Power Down, and Idle sequence. Each character includes Footstep (10 variations) and Movement (10 variations) files. The Construction Kit is organised into four component categories: Metal, Mechanical, Servo, and Synthetic. Metal recordings cover footsteps, movements, impacts, scrapes, rattles, and debris at small, medium, and large sizes. Mechanical recordings include gears, clunks, clicks, levers, slides, and rotations sourced from industrial and vintage mechanical objects. The Servo category spans six motor configurations: plastic and metal housing in small, medium, and large, captured from real motors, including 3D printer arms, servo-driven industrial equipment, and robot components. The Synthetic category provides granular and wavetable-processed elements, including braams, glitches, textures, power-up sweeps, telemetry sequences, and vocal-quality droid sounds. All files are delivered at 96kHz / 24-bit WAV with full UCS-compliant metadata embedded for use with Soundminer, Basehead, and Soundly. Axel Rohrbach, Creative Director of BOOM Library, said: "Every mech project we've seen starts the same way: designers sourcing and patching together elements that were never built to work at different scales. MECHS & ROBOTS fixes that. One coherent system, from nanobots to ship-sized mechs, with the designed characters and the raw material to build your own." Key Specifications: Pricing and Availability: MECHS & ROBOTS is available now. Regular Pricing – Designed: $139/119€ / Construction Kit: $209/179€ / Bundle: $265/229€ Introductory 20% Off for 2 weeks – Designed: $111.20/€95.20 / Construction Kit: $167.20/€143.20 / Bundle: $212.00/€183.20 Promo pricing ends June 11th, 2026 More information: Andy Mac shows us around Chat DSP M4L and more 2600 & 101 had a baby Port names, internal routing and more Works of Art for Your Eurorack Modules Deep into retro hardware Copyright Sonic State Ltd © 1995-2026. All rights reserved. Reproduction in whole or in part in any form or medium without express written permission from Sonic State is prohibited.
Images (9): 




|
|||||
| Fashion Meets Technology: Robots Walk the Catwalk in Seoul, ETBrandEquity | https://brandequity.economictimes.india… | 10 | Jun 01, 2026 00:00 | active | |
Fashion Meets Technology: Robots Walk the Catwalk in Seoul, ETBrandEquityDescription: Galaxy Corporation: In a groundbreaking fashion show in Seoul, humanoid robots showcased stylish outfits alongside human models, highlighting the question of coexistence between humans and technology. Discover innovative designs and the future of fashion in the age of robotics. Content:
By commenting, you agree to the Prohibited Content Policy By commenting, you agree to the Prohibited Content Policy News See whats happening in Marketing & Advertising right now Exclusive Read and get insights from specially curated unique stories from editorial Leaders Speak Business leaders sharing their insights Events Explore and discuss challenges & trends in India's leading B2B events Awards Recognise work that not only stood out but was also purposeful Webinars Join leaders & experts for roundtables, conferences, panels and discussions Subscribe to our Daily Newsletter By continuing you agree to our Privacy Policy & Terms & Conditions Advertise With Us We have various options to advertise with us including Events, Advertorials, Banners, Mailers, etc. Download ETBrandEquity App Save your favourite articles with seamless reading experience Get updates on your preferred social platform Follow us for the latest news, insider access to events and more. About Us Contact Us Newsletters
Images (10): 
|
|||||
| 'Robots Need Clothes': Humanoids Hit Catwalk In Seoul | https://www.deccanchronicle.com/technol… | 6 | Jun 01, 2026 00:00 | active | |
'Robots Need Clothes': Humanoids Hit Catwalk In SeoulDescription: The robot models at the Seoul fashion show appeared to be a humanoid made by Chinese startup Unitree. Content:
Seoul : There were no naked robots in sight at a fashion show held in Seoul with a high-tech twist, where pairs of people and humanoids hit the catwalk in matching outfits. A tasselled blue Texan-style ensemble -- complete with a cowboy hat for the robot -- and a retro silver puffer jacket were among the looks showcased at the event on Thursday. Each human model and their shorter android companion took turns to strut their stuff in unison on stage. The designs, including silky dresses and billowing space-age black trousers like those worn by rock star David Bowie in the 1970s, were carefully fitted to the robots' skeletal frames. Galaxy Corporation, the entertainment company behind the display, said it was meant to ask: "How can humans and robots coexist?" "We realised that robots, too, need to wear clothes," CEO Choi Yong-ho said. "Just as every human being is unique, we believe that every single robot should also be distinct." The clothes were designed by the company, whose spokesperson said it hopes to launch them under the brand name "MACH 33" at the end of the year. The robot models at the Seoul fashion show appeared to be a humanoid made by Chinese startup Unitree, which are popular due to their relatively low cost. Increasingly dexterous robots have proven themselves capable of performing choreographed dances, participating in races, and even able to land backflips. Financial services firm Morgan Stanley predicts the world could have more than a billion humanoids by 2050. But fully automated robots -- using emerging physical AI technology -- are still rare, with most impressive displays remotely operated or pre-programmed.
Images (6): 

|
|||||
| US company tested android robots in combat area in Ukraine … | https://tass.com/economy/2139131 | 4 | Jun 01, 2026 00:00 | active | |
US company tested android robots in combat area in Ukraine — TV - Business & Economy - TASSURL: https://tass.com/economy/2139131 Description: CEO of Foundation Future Industries Sankaet Pathak told CNBC that the core function of the robots was to deliver ammunition to the frontline Content:
NEW YORK, May 31. /TASS/. US-based Foundation Future Industries related to the family of President Donald Trump held trials of android robots in the combat operations zone in Ukraine, CNBC television said, citing the company CEO. According to CNBC, the company sent two Phantom MK-1 model robots for the pilot demonstration. This was the first case of using robots in the combat zone. Their core function was to deliver ammunition to the frontline, company CEO Sankaet Pathak said. The model has a number of weaknesses, the TV channel said. Its carrying capacity is not above 20 kg, and the body is not water-proof. The short time of robots’ independent operation became one more obstacle to their large-scale use. The company plans now to send an improved version to Ukraine. The Phantom 2 will boast "superman" abilities, and its carrying capacity will be twice above the one of the Phantom MK-1.
Images (4): 
|
|||||