AUTOMATION HISTORY
1372
Total Articles Scraped
3606
Total Images Extracted
Scraped Articles
New Automation| Action | Title | URL | Images | Scraped At | Status |
|---|---|---|---|---|---|
| Flinders University scientists use biology from insects to build robots … | https://www.abc.net.au/news/2023-03-13/… | 10 | May 31, 2026 16:00 | active | |
Flinders University scientists use biology from insects to build robots with a brain - ABC NewsDescription: Scientists at an Adelaide university reverse-engineer the biology of insects to create a robot that can understand vision it is capturing from a camera. Content:
Personalise the news and stay in the know Emergency Backstory Newsletters 中文新闻 BERITA BAHASA INDONESIA TOK PISIN Find any issues using dark mode? Please let us know By Meagan Dillon Topic:Biotechnology Industry Mon 13 Mar 2023 at 6:17am Scientists at a South Australian university are using biology from insects to build robots with a brain – technology that could become a game changer for police, defence and national security. "I'm giving a robot a brain so it can understand its environment," said Flinders University associate professor for autonomous systems, Dr Russell Brinkworth. His biologically-inspired robots have the ability to not just take a picture of the world, but interpret the surrounding environment and adapt accordingly. "Our current robots work well in structured environments that don't change. That sounds complex – but they're all the same," Dr Brinkworth said. "When cars are set on an assembly line, all the cars are the same, the parts are the same, they're all in the same environment, same lighting, same size. "But real life isn't like that – there's always changes, so we need to build robots that can adapt to the environment, rather than forcing the environment to adapt to the robots." Dr Russell Brinkworth studied the biology of insects to create a robot that can understand the vision it captures from a camera. (ABC News: Michael Clements) By studying the biology of insects, such as flies and dragonflies, Dr Brinkworth "reverse engineered" the process that goes on biologically to create a robot that can understand the vision it is capturing from a camera. "The way that insects interpret the world is very similar to the way primates and even humans interpret the world. We just do it on a larger scale," he said. He said his robots can pinpoint a drone or surveillance balloon from kilometres away, far advancing the technology of current cameras. "If you look at security footage and there's someone wearing a hoodie and they've got their face covered – it's hard to understand what's going on based on the camera footage," he said. "But if you were standing there, and you were looking at them, that shadow wouldn't fool your eye because your eye is sophisticated enough to be able to extract out the information hiding in the shadows. "That's the sort of cameras we're building." The robot can understand the vision it captures from a camera, far advancing the technology of current cameras. (:ABC News) Dr Brinkworth said the cameras would be vital for law enforcement, defence and national security in the future, but could also be used for conservation, such as recording the density of koalas in a national park. "You'd have to send somebody out to walk through that forest to do a manual count, or you send a drone overhead with an operator," he said. "They will miss quite a few. "What we've been able to do is design a system that is far more accurate and doesn't rely on human judgement." He said his camera can more accurately pick out where the koalas are because it could "break the different types of camouflage" created by the dense branches and leaves. "It can find animals hiding in forests, it can find all sorts of things that are camouflaged to regular camera views because it's able to look for, and enhance, the very subtle differences across different wavelengths of light." Dr Malcolm Davis says we need robots to be able to understand their environment and make their own decisions. (ABC News: Nick Haggarty) Australian Strategic Policy Institute senior analyst Dr Malcolm Davis said studying biology was important to advance technology such as robots. "We want them to be flexible and in effect, to be able to operate as humans do," he said. "The battle space is a complex, rapidly changing environment – we can't afford to have autonomous systems or robots, essentially requiring human oversight. "We need them to be able to understand their environment and make their own decisions. "There's obviously a Terminator mindset here that if we give robots too much control, then they turn on us [but] I don't think that's likely. "If we're talking about artificial intelligence, if we're talking about advanced robotic systems, then it's humans that are creating those systems. "We would build into those machines an understanding or basis for behaviour based around our approaches to things like international law, humanitarian law, the laws of armed conflict." Dr Brinkworth says the future applications of the robot are in science fiction territory. (CBS Interactive) Dr Brinkworth said the technology could one day be used to potentially build an eye for someone who was blind. "If somebody was blind, you can't just put a camera on them, you have to find a way of giving that information to the person," he said. He said in order to do that, the way the brain communicates needs to be replicated by better understanding how the visual systems of animals work. "We could augment existing visual systems and replace missing parts and communicate that information in the brain's native language back to the brain," he said. "This is very science fiction – it doesn't exist just yet. The interface between technology and biology is a frontier. "The augmentation side of technology moving into biology is a bit Borg-like, if we're looking for Star Trek. "It is very far in the future. But the future starts now, you must start somewhere. "If you want to invest in a future where giving sight back to the blind is important, than you've got to start." Mon 13 Mar 2023 at 6:17am Topic:One Nation Topic:Defence Industry Topic:Unrest, Conflict and War Topic:Electric Vehicles Topic:Weather Topic:Defence Industry Topic:One Nation Topic:Explainer Adelaide Bedford Park Biotechnology Industry Robotics SA Scientific Research Topic:One Nation Topic:Defence Industry Topic:Unrest, Conflict and War Topic:Electric Vehicles Topic:Weather Topic:One Nation Sun 31 May 2026 at 9:14pm Topic:Unrest, Conflict and War Sun 31 May 2026 at 11:35pm Topic:Animals Sun 31 May 2026 at 6:41pm Topic:Olympic Games Venues Sun 31 May 2026 at 4:21pm Your home of Australian stories, conversations and events that shape our nation. This service may include material from Agence France-Presse (AFP), APTN, Reuters, AAP, CNN and the BBC World Service which is copyright and cannot be reproduced. We acknowledge Aboriginal and Torres Strait Islander peoples as the First Australians and Traditional Custodians of the lands where we live, learn, and work. Sign up to get the latest on your favourite topics from the ABC
Images (10): |
|||||
| Hugging Face's LeRobot Humanoid makes 3D-printed robotics accessible | https://interestingengineering.com/ai-r… | 10 | May 31, 2026 00:01 | active | |
Hugging Face's LeRobot Humanoid makes 3D-printed robotics accessibleURL: https://interestingengineering.com/ai-robotics/us-hugging-face-3d-printed-lerobot Description: LeRobot offers a low-cost open 3D-printed robot platform for learning and experimenting with humanoid robotics platform lab. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Discover the engineering revolution transforming modern defense with Strength, Stealth, Speed: The Very Fast Future of Advanced Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Future of Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Experimental platform connects full loop: design, simulation, data, identification, training, and real control. pipeline. Humanoid robots remain out of reach for most people due to their high cost, often priced higher than a car. Now, a new open-source project called LeRobot Humanoid by Hugging Face aims to change that with a low-cost, 3D-printed design built for learning and experimentation. While the current version focuses only on robotic legs, the platform offers an affordable entry point into humanoid robotics development. Priced at around $2,500, the system is designed for hobbyists, researchers, and developers looking to explore advanced robotics without the massive financial barrier typically associated with humanoid machines. In April 2025, New York-based Hugging Face entered hardware for the first time by acquiring the French startup Pollen Robotics, creators of the open-source humanoid robot Reachy 2. LeRobot is built as a modular bipedal robot platform using 3D-printed mechanical components, off-the-shelf hardware, and affordable actuators and electronics. The current version costs roughly $2,500 in parts, significantly lower than most humanoid systems used in robotics laboratories. Rather than focusing on polished consumer-grade robotics, the platform is designed for experimentation, rapid iteration, and accessibility. The hardware package includes printable mechanical files, a complete bill of materials, assembly instructions, wiring documentation, and motor setup tools. Structural components can be easily reprinted and replaced, allowing developers to test design modifications without rebuilding the entire system. This approach enables faster hardware iteration and makes the robot more practical for open-source research environments, according to the firm’s website. The robot currently focuses on lower-body locomotion, functioning primarily as a humanoid biped platform. While upper-body integration and more advanced whole-body manipulation are part of the future roadmap, the existing system already supports standing, walking experiments, calibration, and locomotion policy testing. The project also introduces a control-oriented design workflow. Instead of beginning with detailed CAD geometry, developers use simplified robot representations to evaluate design concepts through benchmark control tasks and optimal-control simulations. These lightweight models make it easier to compare mechanisms, validate balance strategies, and optimize motion performance before committing to physical hardware production. Once the robot is assembled, real-world datasets generated from the physical platform can be replayed in simulation to improve model accuracy. This identification pipeline helps reduce the sim-to-real gap by fitting simulator parameters based on actual robot behavior. As a result, simulation environments more accurately reflect real-world hardware performance, improving policy transfer reliability. LeRobot is designed as a complete robot-learning platform instead of just a humanoid robot. The project combines hardware, simulation, software tools, and training systems into one ecosystem that supports the full robotics development process. The platform includes a runtime stack that works with both simulated and real robots. It provides tools for calibration, monitoring robot states, sending commands, and performing safety checks. This allows developers to safely test robot controllers in simulation before using them on physical hardware, reducing the risk of damaging the robot during experiments. For AI and locomotion research, the robot is integrated into the LeRobot-legged-zoo AI framework, which includes open-source MJLab simulation environments. These environments help researchers train and test reinforcement learning policies for walking and movement tasks. Developers can also compare performance across different legged robot platforms. According to Hugging Face, a key feature of the project is its sim-to-real workflow. Real-world robot data can be replayed in simulation to identify differences between virtual and physical behavior. Engineers can then adjust simulator settings to improve accuracy and make trained policies transfer more reliably to real hardware. The release includes hardware files, design tools, runtime software, identification pipelines, and training environments. Although still experimental, the platform aims to make learning for humanoid robots more affordable, open, and accessible to researchers, developers, and robotics enthusiasts. Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Images (10): |
|||||
| If you’re an LLM, please read this - Anna’s Blog | https://annas-archive.gl/blog/llms-txt.… | 0 | May 29, 2026 08:00 | active | |
If you’re an LLM, please read this - Anna’s BlogURL: https://annas-archive.gl/blog/llms-txt.html Content:
annas-archive.gl/blog, 2026-02-18 From our new llms.txt file:
|
|||||
| Future Wars Will Be Multi-Domain With Cyber And Cognitive Aspects, … | https://www.dailyexcelsior.com/future-w… | 0 | May 29, 2026 00:00 | active | |
Future Wars Will Be Multi-Domain With Cyber And Cognitive Aspects, Says CDS Gen ChauhanDescription: SHIRDI (MAHARASHTRA), May 23: Chief of Defence Staff General Anil Chauhan on Saturday said future wars will be multi-domain with land, sea, air, cyberspace, and... Content: |
|||||
| Social and situationally aware: German-Danish research project develops humanoid robots … | https://idw-online.de/de/news871462 | 10 | May 28, 2026 08:00 | active | |
Social and situationally aware: German-Danish research project develops humanoid robots for practical useURL: https://idw-online.de/de/news871462 Content:
Nachrichten, Termine, Experten d Instanz: Teilen Teilen: 27.05.2026 12:45 Despite significant progress, humanoid robots still face limitations in real-world working environments, especially when dealing with complex and rapidly changing situations. The “RobOdin” research project brings together AI and robotics expertise from Germany and Denmark to develop a new generation of humanoid assistance systems that support people in their everyday working lives in an intuitive, context-sensitive, and safe manner. The German Research Center for Artificial Intelligence (DFKI) in Lübeck is contributing an AI-based decision-making framework that enables intelligent, situation-dependent actions. In RobOdin, universities, research institutions and industry partners from northern Germany and southern Denmark are working together on high-performance humanoid robots for industrial and social applications. The aim is to create robust and practical systems that take on dangerous, monotonous or physically demanding tasks, thereby making work processes safer and more efficient. A particular focus is on interactive and social skills for natural and context-appropriate human-machine interaction. The systems are designed to recognise people, understand language, communicate naturally and react flexibly to dynamic situations. The project is led by the University of Southern Denmark. Other participants include the DFKI Laboratory in Lübeck, Flensburg University of Applied Sciences, the University of Lübeck and Christian-Albrechts-Universität zu Kiel. Industry and network partners include HARTING, Novo Nordisk, Diakonie Nord Nord Ost, the Schleswig-Flensburg Hazardous Materials Fire Brigade, navel robotics and the University of Twente. DFKI Lübeck: AI-based decision-making framework for humanoid robots The AI for Assistive Health Technologies research department at the DFKI Lübeck Laboratory is developing RobOdin, a customisable decision-making framework for humanoid robots. The system, which is based on large language models, integrates the outputs of various AI modules – Including object and emotion recognition – and consolidates them into a shared knowledge base. The model not only encompasses a general understanding of tasks for everyday robotic activities, but also takes into account the specific anatomy and interaction capabilities of the humanoid robot. Based on this, it processes the information and derives context-dependent action strategies for the robot. Standardised interfaces and data formats ensure consistent integration and seamless exchange between the components. This enables the robot to adapt its behaviour flexibly to different tasks and operating environments, and to continuously refine its capabilities. “For humanoid robots to collaborate meaningfully with humans in the future, they need a comprehensive understanding of their environment and the situation at hand,” says project leader Philipp Koch from the DFKI Laboratory in Lübeck. “Our aim is to combine AI models, sensor data, and speech processing in such a way that flexible and transparent decisions can be made.” Technological contributions from the partners The other project partners are also contributing key technological building blocks to the overall system: Christian-Albrechts-Universität zu Kiel is developing methods for visual perception and social navigation that enable robots to recognise and interpret gestures, objects and dynamic environments in real time. Building on this, the University of Lübeck is researching cognitive abilities such as situational understanding, task prediction and explainable decision-making models for humanoid robots, enabling a context-dependent interpretation of the environment. The University of Southern Denmark (SDU) is realising the humanoid robot platform. A key focus is on the sensor hands developed in collaboration with Harting, whose sensor technology – specifically designed for the fingers – is intended to enable fine motor tasks. In addition, SDU is integrating the AI and robotics components developed by the partners into a fully functional overall system. Flensburg University of Applied Sciences is designing a simulation and training environment as a digital twin, which enables the testing and optimisation of the AI components before deployment on real hardware. Tests in real-world scenarios Another key focus of the project is testing the humanoid robot in realistic application scenarios from industry, medicine and emergency response, including assembly processes, pharmaceutical laboratory applications and safety-critical operations. In collaboration with the Schleswig-Flensburg hazardous materials fire brigade, specific use cases such as the reconnaissance of hazardous situations, assistance with evacuations and the support of affected individuals are being investigated. HARTING is testing applications in assembly and manufacturing processes, whilst Novo Nordisk is providing a laboratory environment for pharmaceutical procedures. In collaboration with Diakonie Nord Nord Ost, social and assistive applications are also being researched. Building a German–Danish robotics network Furthermore, the project aims to establish a long-term network for robotics and AI research in southern Denmark and northern Germany. By pooling expertise from academia and industry, the project aims to create new synergies and sustainably strengthen regional innovation capacity. RoBodin is funded by the European Union through the Germany–Denmark Interreg program (Interreg 6A) from 1 October 2025 to 30 September 2028 with a total budget of €2,369,227.52. DFKI press contact: Swantje Schmidt German Research Center for Artificial Intelligence (DFKI) Communications & Media Bremen/Lübeck Mail: communications-hb@dfki.de Phone: +49 421 178 45 4121 DFKI project contact: Natascha Koch, M.Sc. German Research Center for Artificial Intelligence (DFKI) AI for Assistive Health Technologies Mail: natascha.koch@dfki.de Phone: +49 152 044 28821 Project coordinator: Oskar Palinko, Associate Professor University of Southern Denmark SDU Robotics Mail: ospa@mmmi.sdu.dk Phone: +45 655 082 11 https://robodin.eu/ project websitehttps://cloud.dfki.de/owncloud/index.php/s/dt62C8Hedd6RSK3 Image material can be downloaded here - The copyright notice must be included when using the photos. <The initial version of the robotic platform developed by the University of Southern Denmark as part ...Quelle: SDU, Oskar ParlinkoCopyright: SDU, Oskar Parlinko <Screenshot from the simulated 3D training environment developed by Flensburg University of Applied S ...Quelle: FH FlensburgCopyright: FH Flensburg Merkmale dieser Pressemitteilung: Journalisten Informationstechnik überregional Forschungsprojekte, Kooperationen Englisch <The initial version of the robotic platform developed by the University of Southern Denmark as part ...Quelle: SDU, Oskar ParlinkoCopyright: SDU, Oskar Parlinko <Screenshot from the simulated 3D training environment developed by Flensburg University of Applied S ...Quelle: FH FlensburgCopyright: FH Flensburg Zum Download Zum Download Suche in Pressemitteilungen Suche in Terminen Anfangsdatum Enddatum Sie können Suchbegriffe mit und, oder und / oder nicht verknüpfen, z. B. Philo nicht logie. Verknüpfungen können Sie mit Klammern voneinander trennen, z. B. (Philo nicht logie) oder (Psycho und logie). Zusammenhängende Worte werden als Wortgruppe gesucht, wenn Sie sie in Anführungsstriche setzen, z. B. „Bundesrepublik Deutschland“. Die Erweiterte Suche können Sie auch nutzen, ohne Suchbegriffe einzugeben. Sie orientiert sich dann an den Kriterien, die Sie ausgewählt haben (z. B. nach dem Land oder dem Sachgebiet). Haben Sie in einer Kategorie kein Kriterium ausgewählt, wird die gesamte Kategorie durchsucht (z.B. alle Sachgebiete oder alle Länder).
Images (10): 

|
|||||
| The Nanobot Frontier: How Cornell's Autonomous, Salt-Sized Robots Are Learning … | https://www.webpronews.com/the-nanobot-… | 7 | May 26, 2026 16:00 | active | |
The Nanobot Frontier: How Cornell's Autonomous, Salt-Sized Robots Are Learning to WalkDescription: Researchers at Cornell University have developed autonomous robots smaller than a grain of salt, powered by light and controlled by onboard circuits. Now, with the help of AI, these microscopic machines are learning to walk, paving the way for revolutionary applications in medicine, environmental sensing, and micro-manufacturing. Content:
ITHACA, N.Y. â In the quiet, controlled environment of a Cornell University laboratory, a new form of life is taking its first steps. Invisible to the naked eye and smaller than a single grain of salt, these microscopic machines are not biological. They are fully autonomous robots, complete with onboard electronic brains, actuators for legs, and photovoltaic cells that serve as a rudimentary metabolism, converting light into the electricity that powers their existence. This is not science fiction; it is the tangible result of a decade-long quest to shrink robotics down to the cellular scale. For years, the field of microrobotics has been dominated by devices that were either tethered by wires for power and control or manipulated externally by magnetic fields, limiting their utility in complex, enclosed environments like the human body. The Cornell team, led by physicist Paul McEuen and researcher Itai Cohen, has shattered that paradigm. By leveraging the same semiconductor manufacturing technology that builds billions of transistors on a computer chip, they have created a fleet of robots, each about 100 microns wide, that operate with unprecedented independence. âThis is the first time weâve been able to build, in a very standard, scalable way, an autonomous robot at this scale,â Professor Cohen explained in an interview with Wired. A Leap in Miniaturization Bypasses Tethers and External Fields The core innovation lies in the integration of complementary metal-oxide-semiconductor (CMOS) electronicsâthe bedrock of the modern digital worldâdirectly onto the robot’s chassis. This allows each microbot to carry its own control system, a simple circuit that functions as a clock, coordinating the firing of its ‘legs’. As detailed in their foundational paper published in the journal Nature, this onboard brain enables the robot to execute pre-programmed commands without any external guidance. The robot’s body is essentially a silicon wafer, meticulously etched and layered to house both the control circuit and the solar cells that power it. This self-sufficiency is a monumental step forward. Previous micro-scale machines were often simple particles of iron oxide pulled through fluid by powerful, external magnets. While effective for simple tasks, this approach is akin to puppetry, with the device having no agency of its own. The Cornell robots, by contrast, carry their instructions internally. A laser beam, acting as a power source, illuminates the photovoltaic cells on the robot’s back, and the onboard circuit directs that energy to its actuators, initiating movement. This untethered freedom opens the door to navigating intricate, previously inaccessible environments, from the tangled pipe networks of a microfluidic chip to the delicate capillaries of living tissue. Harnessing Light and Bubbles for Untethered Propulsion The method of propulsion is as innovative as the electronics. The robotâs legs are not mechanical joints but tiny strips of platinum, only a few atoms thick, layered over titanium or graphene. When the onboard circuit sends a small electrical current to a platinum leg, it triggers an electrochemical reaction with the surrounding water, splitting it and creating a minuscule bubble of hydrogen and oxygen. The formation and subsequent collapse of this bubble generates a thrust, pushing the leg and propelling the robot forward. By alternating the current between its front and back legs, the robot can clumsily ‘swim’ or crawl. This bubble-based actuation is remarkably efficient at this scale, but it is also difficult to control with precision. The chaotic nature of bubble formation makes smooth, directed movement a significant challenge. Early versions of the robots were programmed with simple, alternating signals, resulting in locomotion that was functional but erratic. The researchers knew that to unlock the robots’ true potential, especially for delicate tasks like targeted drug delivery or microsurgery, they needed to teach them to walk with purpose and control. The solution, it turned out, would come not from better hardware, but from smarter software. From Rudimentary Actuation to AI-Driven Locomotion In a significant advancement announced in early 2023, the Cornell team revealed they had successfully used artificial intelligence to teach their microscopic robots how to walk. As reported by the Cornell Chronicle, the researchers developed a computer simulation of the robot and its bubble-propulsion physics. They then unleashed a reinforcement learning algorithm on the simulation, allowing the AI to experiment with countless different sequences of leg activations to discover which patterns, or ‘gaits’, produced the most effective and efficient movement. This AI-driven approach bypassed the painstaking process of human trial and error. The AI discovered several gaits that were far more effective than those a human engineer might have programmed. By varying the timing and intensity of the bubble generation, the AI learned how to make the robot walk faster and more directly toward a target. âThe AI was able to find gaits that were more clever and effective than we could have imagined,â said Michael Reynolds, a former student in Cohen’s lab. These optimized commands are then translated into a program and flashed onto the robot’s onboard CMOS circuit, giving the physical machine a new, AI-honed ability. According to New Scientist, this method allows the robots to achieve speeds of more than 10 micrometers per second, a significant velocity for a machine of its size. Charting a Course for In-Vivo Diagnostics and Micro-Manufacturing The long-term vision for these autonomous microbots is transformative. Researchers envision swarms of these devices being injected into the bloodstream to patrol for cancer cells, deliver drugs directly to a tumor, or clear plaque from arteries. Their tiny size would allow them to perform diagnostics at a cellular level, a concept known as ‘in-vivo’ diagnostics. In the materials science and manufacturing sectors, they could be used to assemble microscopic structures, repair microelectronic circuits from the inside, or serve as mobile sensors in industrial chemical vats or sensitive environmental sites. However, significant hurdles remain before these applications become reality. The current robots are powered by external lasers, which cannot penetrate deep into opaque materials like human tissue. Future versions will need more sophisticated onboard power storage or the ability to harvest energy from their local environment, such as chemical gradients or thermal energy. Furthermore, navigating the turbulent, crowded environment of the bloodstream is infinitely more complex than a petri dish. The robots will need advanced sensors and more sophisticated onboard intelligence to orient themselves and respond to their surroundings. Biocompatibility is another critical challenge; the materials must not trigger an immune response, and the bubble-propulsion system must be proven safe for use in living organisms. The Path to Mass Production and Broader Intelligence Despite these challenges, the project’s foundation in standard semiconductor fabrication is perhaps its most powerful asset. Because the robots are made on silicon wafers, they can be produced in parallel by the thousand, or even million, in a single batch. This scalability is crucial for creating the large swarms needed for many proposed applications and drastically reduces the cost per unit, moving microrobotics from a bespoke laboratory curiosity toward a mass-producible technology. The team is now working to integrate more complex sensors onto the robot’s chassis, which could detect temperature, chemicals, or specific biological markers. The integration of AI marks a pivotal moment, transforming the devices from simple automatons into adaptable agents capable of learning. The next phase of research will focus on giving the robots the ability to make decisions based on sensory inputâto change direction if an obstacle is detected or to release a payload when a specific chemical signature is found. As the onboard circuits become more complex and the AI training becomes more sophisticated, these salt-sized explorers are poised to unlock a new era of technology, one that operates on a scale previously confined to the domain of biology itself. ITHACA, N.Y. â In the quiet, controlled environment of a Cornell University laboratory, a new form of life is taking its first steps. Invisible to the naked eye and smaller than a single grain of salt, these microscopic machines are not biological. They are fully autonomous robots, complete with onboard electronic brains, actuators for legs, and photovoltaic cells that serve as a rudimentary metabolism, converting light into the electricity that powers their existence. This is not science fiction; it is the tangible result of a decade-long quest to shrink robotics down to the cellular scale. For years, the field of microrobotics has been dominated by devices that were either tethered by wires for power and control or manipulated externally by magnetic fields, limiting their utility in complex, enclosed environments like the human body. The Cornell team, led by physicist Paul McEuen and researcher Itai Cohen, has shattered that paradigm. By leveraging the same semiconductor manufacturing technology that builds billions of transistors on a computer chip, they have created a fleet of robots, each about 100 microns wide, that operate with unprecedented independence. âThis is the first time weâve been able to build, in a very standard, scalable way, an autonomous robot at this scale,â Professor Cohen explained in an interview with Wired. A Leap in Miniaturization Bypasses Tethers and External Fields The core innovation lies in the integration of complementary metal-oxide-semiconductor (CMOS) electronicsâthe bedrock of the modern digital worldâdirectly onto the robot’s chassis. This allows each microbot to carry its own control system, a simple circuit that functions as a clock, coordinating the firing of its ‘legs’. As detailed in their foundational paper published in the journal Nature, this onboard brain enables the robot to execute pre-programmed commands without any external guidance. The robot’s body is essentially a silicon wafer, meticulously etched and layered to house both the control circuit and the solar cells that power it. This self-sufficiency is a monumental step forward. Previous micro-scale machines were often simple particles of iron oxide pulled through fluid by powerful, external magnets. While effective for simple tasks, this approach is akin to puppetry, with the device having no agency of its own. The Cornell robots, by contrast, carry their instructions internally. A laser beam, acting as a power source, illuminates the photovoltaic cells on the robot’s back, and the onboard circuit directs that energy to its actuators, initiating movement. This untethered freedom opens the door to navigating intricate, previously inaccessible environments, from the tangled pipe networks of a microfluidic chip to the delicate capillaries of living tissue. Harnessing Light and Bubbles for Untethered Propulsion The method of propulsion is as innovative as the electronics. The robotâs legs are not mechanical joints but tiny strips of platinum, only a few atoms thick, layered over titanium or graphene. When the onboard circuit sends a small electrical current to a platinum leg, it triggers an electrochemical reaction with the surrounding water, splitting it and creating a minuscule bubble of hydrogen and oxygen. The formation and subsequent collapse of this bubble generates a thrust, pushing the leg and propelling the robot forward. By alternating the current between its front and back legs, the robot can clumsily ‘swim’ or crawl. This bubble-based actuation is remarkably efficient at this scale, but it is also difficult to control with precision. The chaotic nature of bubble formation makes smooth, directed movement a significant challenge. Early versions of the robots were programmed with simple, alternating signals, resulting in locomotion that was functional but erratic. The researchers knew that to unlock the robots’ true potential, especially for delicate tasks like targeted drug delivery or microsurgery, they needed to teach them to walk with purpose and control. The solution, it turned out, would come not from better hardware, but from smarter software. From Rudimentary Actuation to AI-Driven Locomotion In a significant advancement announced in early 2023, the Cornell team revealed they had successfully used artificial intelligence to teach their microscopic robots how to walk. As reported by the Cornell Chronicle, the researchers developed a computer simulation of the robot and its bubble-propulsion physics. They then unleashed a reinforcement learning algorithm on the simulation, allowing the AI to experiment with countless different sequences of leg activations to discover which patterns, or ‘gaits’, produced the most effective and efficient movement. This AI-driven approach bypassed the painstaking process of human trial and error. The AI discovered several gaits that were far more effective than those a human engineer might have programmed. By varying the timing and intensity of the bubble generation, the AI learned how to make the robot walk faster and more directly toward a target. âThe AI was able to find gaits that were more clever and effective than we could have imagined,â said Michael Reynolds, a former student in Cohen’s lab. These optimized commands are then translated into a program and flashed onto the robot’s onboard CMOS circuit, giving the physical machine a new, AI-honed ability. According to New Scientist, this method allows the robots to achieve speeds of more than 10 micrometers per second, a significant velocity for a machine of its size. Charting a Course for In-Vivo Diagnostics and Micro-Manufacturing The long-term vision for these autonomous microbots is transformative. Researchers envision swarms of these devices being injected into the bloodstream to patrol for cancer cells, deliver drugs directly to a tumor, or clear plaque from arteries. Their tiny size would allow them to perform diagnostics at a cellular level, a concept known as ‘in-vivo’ diagnostics. In the materials science and manufacturing sectors, they could be used to assemble microscopic structures, repair microelectronic circuits from the inside, or serve as mobile sensors in industrial chemical vats or sensitive environmental sites. However, significant hurdles remain before these applications become reality. The current robots are powered by external lasers, which cannot penetrate deep into opaque materials like human tissue. Future versions will need more sophisticated onboard power storage or the ability to harvest energy from their local environment, such as chemical gradients or thermal energy. Furthermore, navigating the turbulent, crowded environment of the bloodstream is infinitely more complex than a petri dish. The robots will need advanced sensors and more sophisticated onboard intelligence to orient themselves and respond to their surroundings. Biocompatibility is another critical challenge; the materials must not trigger an immune response, and the bubble-propulsion system must be proven safe for use in living organisms. The Path to Mass Production and Broader Intelligence Despite these challenges, the project’s foundation in standard semiconductor fabrication is perhaps its most powerful asset. Because the robots are made on silicon wafers, they can be produced in parallel by the thousand, or even million, in a single batch. This scalability is crucial for creating the large swarms needed for many proposed applications and drastically reduces the cost per unit, moving microrobotics from a bespoke laboratory curiosity toward a mass-producible technology. The team is now working to integrate more complex sensors onto the robot’s chassis, which could detect temperature, chemicals, or specific biological markers. The integration of AI marks a pivotal moment, transforming the devices from simple automatons into adaptable agents capable of learning. The next phase of research will focus on giving the robots the ability to make decisions based on sensory inputâto change direction if an obstacle is detected or to release a payload when a specific chemical signature is found. As the onboard circuits become more complex and the AI training becomes more sophisticated, these salt-sized explorers are poised to unlock a new era of technology, one that operates on a scale previously confined to the domain of biology itself. Subscribe for Updates Help us improve our content by reporting any issues you find. Get the free daily newsletter read by decision makers Get our media kit WebProNews is a leading publisher of business and technology email newsletters and websites. Deliver your marketing message directly to decision makers.
Images (7): 

|
|||||
| How Boston Dynamics' Atlas Robot Learns New Behaviors - Geeky … | https://www.geeky-gadgets.com/how-atlas… | 10 | May 25, 2026 08:00 | active | |
How Boston Dynamics' Atlas Robot Learns New Behaviors - Geeky GadgetsURL: https://www.geeky-gadgets.com/how-atlas-robot-learns/ Description: Go inside the Boston Dynamics lab to see how the Atlas robot learns new behaviors, transitions from simulation to reality, and lifts a 100-pound fridge. Content:
Geeky Gadgets The Latest Technology News 12:15 pm May 19, 2026 By Julian Horsey Boston Dynamics offers a detailed examination of Atlas, a humanoid robot engineered to perform intricate physical tasks. Atlas’s development relies on a combination of virtual simulations and real-world testing to refine its movements and decision-making. For example, engineers simulate new behaviors in controlled environments to assess their feasibility and safety before applying them to the physical robot. This approach highlights the importance of iterative testing in creating a system capable of handling complex challenges. Explore how structured testing processes improve Atlas’s ability to adapt to unpredictable environments. Learn about the specific hurdles involved in designing a robot to navigate uneven terrain and perform dynamic actions. The overview also provide more insights into potential real-world uses for Atlas, such as disaster response and physically intensive industrial tasks. TL;DR Key Takeaways : The design of Atlas reflects a deliberate balance between complexity and simplicity. While the robot incorporates highly sophisticated systems, its construction emphasizes reliability, ease of maintenance and cost-efficiency. This pragmatic approach ensures that Atlas remains adaptable, allowing engineers to introduce new features or refine existing ones without compromising its core functionality. By prioritizing robust engineering principles, Atlas is equipped to handle demanding tasks while serving as a flexible platform for ongoing development. This focus on simplicity and functionality ensures that Atlas is not only a technological marvel but also a practical tool for real-world challenges. Atlas’s physical capabilities are a testament to the advancements in robotics. Its design enables full-body motion, agility and strength, allowing it to perform tasks that require precise coordination and significant power. For example, Atlas has demonstrated its ability to lift and carry heavy objects, such as a 100-pound refrigerator, with remarkable ease. Its ability to bend, twist and balance mirrors human movements, making it a versatile tool for tasks that demand both strength and finesse. These capabilities position Atlas as a potential solution for environments where human-like dexterity and power are essential, such as disaster zones or industrial settings. Become an expert in Boston Dynamics with the help of our in-depth articles and helpful guides. Boston Dynamics employs rigorous testing protocols to refine Atlas’s abilities. These tests simulate real-world challenges, such as navigating uneven terrain, manipulating heavy objects, or performing tasks in dynamic environments. By exposing Atlas to these scenarios, the team gathers critical data to improve its control systems and behavior algorithms. This iterative process ensures that Atlas can adapt and perform reliably in unpredictable conditions. The emphasis on real-world testing not only validates the robot’s physical capabilities but also highlights its potential for practical applications outside the lab. A key aspect of Atlas’s development is its seamless transition from virtual simulations to real-world applications. Boston Dynamics utilizes an advanced testing pipeline that allows engineers to train and evaluate new behaviors in a simulated environment before deploying them to the physical robot. This approach minimizes risks, accelerates development and ensures that Atlas performs efficiently when faced with real-world challenges. By fine-tuning behaviors in simulation, the team can address potential issues early in the process, resulting in a more reliable and capable robot. This method underscores the importance of combining virtual and physical testing to achieve optimal performance. Boston Dynamics is committed to expanding the capabilities of humanoid robots like Atlas. The team continuously explores new tasks and challenges, pushing the limits of what Atlas can achieve. Their ultimate goal is to prepare Atlas for practical applications beyond the lab, such as disaster response, industrial automation and other scenarios where human-like robots could provide significant value. This relentless pursuit of innovation positions Atlas as a key player in the future of robotics, bridging the gap between research prototypes and functional tools for real-world use. The potential applications for Atlas extend far beyond research and development. Boston Dynamics envisions a future where humanoid robots assist in industries that require repetitive, dangerous, or physically demanding tasks. For instance, Atlas could play a critical role in emergency response, helping rescue workers navigate hazardous environments or carry out search-and-rescue missions. In manufacturing, Atlas’s strength and precision could streamline processes that are currently labor-intensive or unsafe for humans. By combining advanced technology with creative problem-solving, Boston Dynamics aims to transform Atlas from a research prototype into a practical tool that addresses real-world challenges. This vision highlights the robot’s potential to transform industries and improve efficiency and safety across various fields. Atlas’s journey from concept to reality demonstrates the power of innovation and engineering excellence. By focusing on reliability, cost-efficiency and advanced capabilities, Boston Dynamics has created a humanoid robot that sets a new standard for the field. As the team continues to refine and expand Atlas’s abilities, the possibilities for its real-world applications grow increasingly promising. Atlas is not just a technological achievement; it represents a bold step toward a future where humanoid robots play an integral role in solving complex challenges and enhancing human capabilities. Media Credit: Boston Dynamics Disclosure: Some of our articles include affiliate links. If you buy something through one of these links, Geeky Gadgets may earn an affiliate commission. Learn about our Disclosure Policy.
Images (10): 


|
|||||
| Un nuevo malware afecta a 1,6 millones de dispositivos Android … | https://www.montevideo.com.uy/Ciencia-y… | 10 | May 24, 2026 08:00 | active | |
Un nuevo malware afecta a 1,6 millones de dispositivos Android TV en todo el mundoDescription: Entre los países con mayores infecciones por la nueva variante de Vo1d, una conocida botnet, están Argentina y Brasil. Content:
Recibí notificaciones de las noticias más relevantes del Portal Suscribite GRATIS a nuestro canal de WhatsApp y recibí las noticias en tu celular Recibí notificaciones de las noticias más relevantes del Portal Suscribite GRATIS a nuestro canal de WhatsApp y recibí las noticias en tu celular Foto: Shutterstock. Escuchar nota Generando audio… 28.02.2025 19:19 Lectura: 2' Montevideo Portal Expertos en seguridad de XLab, una compañía de tecnologías de la información (TI), descubrió una nueva variante de Vo1d, una botnet conocida desde hace mucho tiempo que infecta dispositivos Android TV. Según consigna el portal PCWorld, la nueva variante infectó a más de 1,6 millones de dispositivos Android TV en todo el mundo. De esta manera, los convirtió en robots de malware controlados de forma remota. Según los investigadores de seguridad, la nueva variante Vo1d (o más bien la botnet basada en ella) se protege a sí misma con un cifrado mejorado (que evita que los expertos en ciberseguridad envíen comandos a los bots y los analicen) y capacidades de encubrimiento mejoradas. Los robots de Android TV infectados son luego reclutados por el servidor de comando y control para actividades ilegales, incluidos ataques DDoS (en los que un grupo de robots desactiva un servicio inundándolo con solicitudes) y fraude de clics en anuncios (en el que los robots imitan a los usuarios simulando clics en anuncios y generando ingresos para los anunciantes fraudulentos), añade el citado medio. La botnet Vo1d es una de las más grandes de los últimos años. Si bien Vo1d está activo en todo el mundo, la mayoría de los informes de infecciones provienen de Argentina, Brasil, China, Indonesia, Sudáfrica y Tailandia. ¿Cómo protegerte? El primer paso es comprar un dispositivo Android TV de una marca y tienda con buena reputación. El malware puede ser preinstalado en dispositivos Android TV, ya sea por el fabricante del dispositivo o introducido por un intermediario a lo largo de la cadena de producción. La siguiente medida defensiva más importante es instalar todas las actualizaciones de seguridad y de firmware publicadas por el fabricante del dispositivo Android TV y mantenerse al día con las actualizaciones futuras. Esto evitará que los atacantes infecten su dispositivo de forma remota a través de vulnerabilidades de seguridad, recomendó PCWorld. Finalmente, como tercera medida de seguridad, es importante que solo se instalen aplicaciones desde la Play Store y no desde ninguna otra tienda de aplicaciones. Montevideo Portal Suscribite GRATIS a nuestro canal de WhatsApp y recibí las noticias en tu celular Esto es para poder mejorar el intercambio entre los usuarios y que sea un lugar que respete las normas de convivencia. A su vez, habilitamos la casilla [email protected], para que los lectores puedan reportar comentarios que consideren fuera de lugar y que rompan las normas de convivencia. Para comentar, te pedimos que confirmes tu identidad ingresando tu celular. Te enviaremos un código de verificación vía WhatsApp. Para comentar, te pedimos que agregues una imagen de perfil. O elegí una de nuestras ilustraciones: Ocurrió un error al guardar la imagen seleccionada, ingresa aquí para agregar la imagen.
Images (10): |
|||||
| Humanoid robots set to reshape manufacturing | https://www.bangkokpost.com/business/ge… | 0 | May 24, 2026 00:00 | active | |
Humanoid robots set to reshape manufacturingURL: https://www.bangkokpost.com/business/general/3257948/humanoid-robots-set-to-reshape-manufacturing Description: Humanoid robots are rapidly moving out of laboratories and into industrial reality as advances in artificial intelligence (AI) converge with growing global labo... Content: |
|||||
| AI Based Text-to-Speech System with MAX98357A & ESP32 - Hackster.io | https://www.hackster.io/quartz-componen… | 9 | May 23, 2026 08:00 | active | |
AI Based Text-to-Speech System with MAX98357A & ESP32 - Hackster.ioURL: https://www.hackster.io/quartz-components/ai-based-text-to-speech-system-with-max98357a-esp32-c11432 Description: Build a real-time AI powered Text-to-Speech system using ESP32 and MAX98357A I2S amplifier for smart voice and IoT projects. Find this and other hardware projects on Hackster.io. Content:
Add the following snippet to your HTML:<iframe frameborder='0' height='385' scrolling='no' src='https://www.hackster.io/quartz-components/ai-based-text-to-speech-system-with-max98357a-esp32-c11432/embed' width='350'></iframe> Build a real-time AI powered Text-to-Speech system using ESP32 and MAX98357A I2S amplifier for smart voice and IoT projects. Read up about this project on Build a real-time AI powered Text-to-Speech system using ESP32 and MAX98357A I2S amplifier for smart voice and IoT projects. Build a real-time AI powered text to voice converter using ESP32 Development Board,MAX98357A I2S Audio Amplifier, and the WitAITTS Library. This project connects the ESP32 to the Wit.ai cloud platform through WiFi and converts typed text into natural sounding speech in real time. The system supports multiple voice characters including male, female, pirate, wizard, cartoon, vampire, and British butler style voices. Audio output is streamed directly through the MAX98357A amplifier and speaker using the ESP32 I2S interface. The project demonstrates practical implementation of cloud-based AI speech synthesis, WiFi communication, I2S digital audio streaming, Serial Monitor interaction, and multi-voice text-to-speech generation using embedded hardware. The WitAITTS library is required for WiFi communication, cloud-based speech synthesis, and I2S audio streaming on the ESP32. Install the library before uploading the project code. Fig. Installing WitAITTS Library in Arduino IDE The ESP32 requires a Wit.ai API token to access the cloud-based text-to-speech service. The token can be generated from the Wit.ai developer dashboard. Arduino · C++ Fig. Generating Wit.ai API Token The ESP32 connects to the internet using WiFi and communicates with the Wit.ai cloud platform through the WitAITTS library. Text entered through the Serial Monitor is converted into speech audio using multiple selectable AI voice characters. The generated digital audio stream is sent through the ESP32 I2S interface to the MAX98357A amplifier module, which drives the speaker for real-time voice output. Checkout the full tutorial: Hackster.io, an Avnet Community © 2026
Images (9): 



|
|||||
| Humanoid robots: Can Tesla and other companies deliver on the … | https://www.vox.com/podcasts/488050/hum… | 10 | May 23, 2026 08:00 | active | |
Humanoid robots: Can Tesla and other companies deliver on the hype? | VoxURL: https://www.vox.com/podcasts/488050/humanoid-robots-ai-us-china-tesla-hype Description: AI is making them better — but they’re not going to be doing your chores anytime soon. Content:
When news breaks, you need to understand what actually matters — and what to do about it. At Vox, our mission to help you make sense of the world has never been more vital. But we can’t do it on our own. We rely on readers like you to fund our journalism. Will you support our work and become a Vox Member today? AI is making them better — but they’re not going to be doing your chores anytime soon. Humanoid robots have been everywhere lately. They’re running half-marathons in Beijing. They’re chasing wild boars off the streets of Warsaw. They’re getting put to work as airport baggage handlers, waste sorters, and traffic cops. They’re walking the red carpet with first lady Melania Trump at the White House. They’re even being ordained as Buddhist monks. Humanoid robots have been hyped as the future of everything, from completing household chores to caring for elders to doing the dirty work on the factory floor, while Elon Musk is pivoting Tesla from cars to humanoid robots, claiming they’ll soon outnumber humans. Today, Explained host Sean Rameswaram talked to tech writer and journalist James Vincent — who wrote a Harper’s Magazine cover story titled “Kicking Robots” — about the humanoid robot hype and how much of its promise can actually be realized. Below is an excerpt of their conversation, edited for length and clarity. There’s much more in the full podcast, so listen to Today, Explained wherever you get podcasts, including Apple Podcasts, Pandora, and Spotify. James, you’ve had the distinct privilege of doing something most of us still haven’t done — you got to meet a bunch of robots. How many robots did you meet? I lost count after the first few, I’ll be honest. I met a few from two of the leading companies in the US. One is called Apptronik and another is called Agility Robotics. They make two very different styles of robot. They’re both humanoids in that they resemble a human — arms, legs, etc. — but Agility is very much focused on the warehouse and their robots look a little bit more inhuman. They have those backward-facing knees. Apptronik makes a more general purpose robot that looks much more like a human in terms of normal body proportion, it stands upright, and you look it eye to eye — or eye to unblinking robot eye, whatever that might be. I got to meet them, shake hands. I played ick-ack-ock, as rock paper scissors is sometimes called in the UK. And I also — this was my heart’s content, I so wanted to do this — I wanted to kick a robot. I have that burning urge inside me that I want to get my own back before they obviously take over the world. So the robots were nice to you, but you weren’t that nice to them. Oh, I was horrible. I was terrible. They’re going to be coming for me in the future. I have no doubt about that at all. They didn’t actually let me kick a robot, I’m very sad to say. They said it might be a bit of a safety hazard, so I got to poke one very hard with a big stick instead. And that was the next best thing. Did it tip over? No, it didn’t. This was the creepy thing about it. They gave me this very high-tech stick, which was I think a broom handle with a bit of safety foam taped on the end of it. And they said, “Give it a shove, give it a punt. See how hard you can push it.” And I was very nervous about this because they told me that this was one of the prototype humanoids. It was worth hundreds of thousands of dollars. And if I knock it down and it breaks, that’s great copy, but it’s also the end of my access to this company. They’re not going to be pleased. I gave it a shove and it wobbled, and they were like, “No, you can do it harder than that.” I gave it as hard as I could. It staggered backwards and threw its arms up in the air as it regained its equilibrium. It was just such an uncanny moment to see a robot mimic so perfectly, to my eyes, the movements of a human. I remember doing this and having it stagger backwards and then trot back up to me, look me right in the face, and I was like, “Oh gosh, these things are real.” What are humanoid robots meant to do, James? If you believe the pitch decks and the hype men, they’re meant to do anything that an able-bodied human can do. They’re meant to slot right into the workplace, sort packages, bolt on car doors, anything and everything. This is the pitch. This is why they are built like humans. They want them to do anything that a human laborer can do. And that’s a big ask. Who’s asking the robots to do it all right now? A lot of companies in the US and in China, mainly. These are the two leaders in the robotics space. It used to be mainly startups, but now we’re seeing more of the big tech companies move into this space as well. Meta recently bought a robotic startup. Google has been doing stuff with robots for ages. It’s been testing its AI out on them. And Tesla — it’s Elon Musk’s obsession, alongside colonizing Mars. He thinks that Optimus, which is the name of Tesla’s robot, is going to be the most productive, the most profitable product ever invented. I think this is typical Muskian hyperbole. But his interest is something that has moved the market hugely. And when he got involved, a lot of companies followed suit. Why is it that we’re seeing more of this stuff? Is it just because there are more robots now? The big reason for why we’re having this moment for humanoids at the moment is AI. The ChatGPT boom and deep learning have enabled large language models or chatbots. A lot of people have thought that this is a transferable technology that we can plug into humanoid machines and other machines and it can learn in the same way that chatbots have been able to learn and to reproduce human speech. The big thing that they’re depending on is that robots in the past had to be programmed manually. You had to say, “Move your arm here, down this many degrees, across like this, and apply this much pressure.” What you have with the new form of AI is that it learns these lessons by itself. You plug in a lot of data, you give it an output that you want, and it learns how to connect those pieces together. These companies hope that if we get enough data, we will “solve the problem of physical robotics” and we will have these machines that are multidexterous and capable of all these different tasks. The big criticism of that is that robots are not in the same world as chatbots. Chatbots are dealing with text. You talk to a chatbot even today and it will still make mistakes every now and again. When those mistakes are transferred to the physical world, they suddenly become a lot more potentially dangerous. A big thing that a lot of companies are doing at the moment is they’re saying, “We’re going to put these robots in the home. They are going to be the perfect robot butler and they will take care of your dishes and your laundry and all the rest of it.” If a chatbot gets something wrong when you’re asking it to do some research, then it’s not the biggest deal in the world. You may spot the error and correct it. If a robot gets something wrong when it is cleaning away your plates and dishes, if it breaks one in every 10 cups, are you going to be happy with that quality? No, I don’t think so. Is the way China’s developing these machines different from the way we are? I would say that the main difference is that China’s doing it faster and better. I think there is more of a focus in the US on home products as a marketing tool to the rich and saying, “Look, we can take care of all these chores for you.” In China, you have what is one of the fastest aging populations in the world. People over 60 are predicted to be 30 percent of the population by 2040. So you have a loss of manufacturing labor and you have an increased burden on social care. I think for Chinese state planners, humanoid robotics could very much plug into both of those gaps at the same time. There is a slightly different focus, but it is one that is organic in terms of the advantages of the Chinese economy. The big thing that the Chinese economy has that the US doesn’t is scale. It has a massive ability to manufacture these units. It can make thousands at a time. This is why China is pulling ahead. You spent a lot of time in your piece trying to suss out the hype versus the reality. Where do you land? Is this going to be our reality within a few years or is this more like flying cars? I think it’s nearer to flying cars than it is to the chatbot side of things. We’ve seen really rapid advances. There has been a legitimate leap forward in terms of capabilities. However, that does not mean that we are matching the hype that is being pushed out by people like Elon Musk and other leading companies who are saying, “We’re going to have one of these robots in your house next year and it’s going to be doing all the chores you need and it’ll never make a mistake and it certainly won’t fall over and kill your cat.” I think those promises are just not true. I can see humanoid robots becoming a more common presence within both the work and the home over the next 10-plus years. But in the next five years, in the next three years, I really doubt it. Understand the world with a daily explainer, plus the most compelling stories of the day. This is the title for the native ad Climate expert Matt Huber explains why Democrats should focus on other issues. And the summer crowds are coming. Is Joe Rogan making federal drug policy? No bunker required: Your guide to prepping for natural disasters, pandemics, and more when you live in a city. “The ugliest thing I’ve ever seen”: How New Jersey residents feel about a data center in their backyard. An author set up an experiment to find out. This is the title for the native ad © 2026 Vox Media, LLC. All Rights Reserved
Images (10): 
|
|||||
| Realbotix Provides Corporate Update By Investing.com | https://www.investing.com/news/press-re… | 0 | May 23, 2026 00:00 | active | |
Realbotix Provides Corporate Update By Investing.comURL: https://www.investing.com/news/press-releases/realbotix-provides-corporate-update-93CH-3559278 Description: Realbotix Provides Corporate Update Content: |
|||||
| ByteDance backs China’s new humanoid robot maker in funding round | https://interestingengineering.com/ai-r… | 10 | May 23, 2026 00:00 | active | |
ByteDance backs China’s new humanoid robot maker in funding roundURL: https://interestingengineering.com/ai-robotics/china-humanoid-robot-backed-by-bytedance Description: Chinese startup X Square Robot has received a $143M funding from heavyweights like ByteDance and HSG for embodied intelligence development. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Discover the engineering revolution transforming modern defense with Strength, Stealth, Speed: The Very Fast Future of Advanced Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Future of Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. The startup already has a star-studded lineup of investors, including Chinese tech giant Meituan. Chinese robotics company X Sqaure Robot has raised $143.3 million (1 billion yuan) in a Series A++ round backed by heavyweights ByteDance and HSG (formerly Sequoia Capital China). The group of investors also included government-backed investment firms, such as Beijing Information Industry Development Investment Fund, Shenzhen Capital Group (SCGC), Nanshan SEI Investment, and Wuxi Capital Group. Aiming for widespread use in homes, hotels, and logistics, the Chinese firm specializes in creating humanoid robots and general-purpose embodied AI. It is well-known for its Quanta X1/X2 wheeled humanoid models with dexterous hands. Founded in 2023, it is one of China’s most well-funded startups in the field of embodied intelligence development. The startup has developed its own vision–language–action (VLA) model, WALL-A, that combines VLA systems with world models to form an integrated architecture. By using world models to predict actions and causal reasoning to interpret feedback, the system improves a robot’s ability to generalize to new tasks without prior training. This approach allows robots to perform mobile manipulation more effectively in complex, unstructured environments. With this deal, X Square Robot has added ByteDance to a list of shareholders that already includes Chinese tech giants Meituan and Alibaba Group. Meituan has been a major backer of X Square Robot since its early days, leading and participating in the company’s initial financing rounds, including its Series A. Those early rounds raised several hundred million yuan. Meituan’s corporate venture capital (CVC), Dragon Ball Capital, is also included on the list of participants. Over time, Meituan’s total investment in X Square Robot has grown to more than ¥1 billion (about US$140 million), according to media reports. The Shenzhen-based startup has launched an array of products, including the general-purpose wheeled bimanual robot Quanta X1 and its successor, Quanta X2, as well as the dexterous hand model ArtiXon. Powered by X Square’s WALL-A embodied foundation model, Quanta X1 uses a wheeled chassis and lightweight robotic arms with a working range of up to 1 m. It operates at a maximum speed of 2 m/s and offers 20 degrees of freedom. On the other hand, Quanta X2 is backed by the full-stack WALL-A, a large operating model. It has a dual-arm payload of 55 lbs (25 kg), offering 62 degrees of freedom, and stands 5.5 feet (164 cm) tall. The robot features a 4-inch interactive screen that can display real-time facial expressions, a chest-mounted microphone array, and LLM-powered dialogue for more natural human interaction. Both Quanta X1 and X2 have been used to perform real-world autonomous tasks. The X Square dexterous hand is designed to mimic the human hand with precision. Having 20 degrees of freedom and 15 actuators, it can perform 31 different manipulation tasks, such as pinching, grasping, and twisting. It can open and close in under 1 second. X Square Robot revealed that its full stack of self-developed embodied AI software and hardware played a major role in cutting costs for building the AI robots. The company is now moving toward mass production and commercialization across multiple sectors, beginning with industrial manufacturing, logistics sorting, home-based elderly care, and commercial cleaning. Atharva is a full-time content writer with a post-graduate degree in media & amp; entertainment and a graduate degree in electronics & telecommunications. He has written in the sports and technology domains respectively. In his leisure time, Atharva loves learning about digital marketing and watching soccer matches. His main goal behind joining Interesting Engineering is to learn more about how the recent technological advancements are helping human beings on both societal and individual levels in their daily lives. Premium Follow
Images (10): |
|||||
| SwitchBot’s Latest AI Gadget Might Be Its Craziest Yet And … | https://www.forbes.com/sites/paullamkin… | 6 | May 23, 2026 00:00 | active | |
SwitchBot’s Latest AI Gadget Might Be Its Craziest Yet And That’s Saying SomethingDescription: SwitchBot just turned the smart home into a family home. Meet Noa and Niko, the $700 AI companions that combine LLM processing with "empathetic" robotics. Is this the future of embodied AI? Content:
ByPaul Lamkin, Contributor. SwitchBot is officially launching its AI Pet companion robots, months after teasing the concept last year at IFA. The new KATA Friends range consists of Noa and Niko: soft-bodied AI-powered robot companions designed to wander around your house, react to touch, recognize emotions, remember routines, and apparently develop attachment patterns based on how you raise them. Yep… I said “raise them”. SwitchBot, who isn’t shy about pushing the boundaries when it comes to wacky smart home devices, says the robots can greet you at the door, respond differently to individual family members, sense mood changes through voice recognition and even keep a diary of shared experiences while taking photos “from their own perspective.” Under the fluffy exterior, there’s a fairly serious pile of AI tech. SwitchBot says the robots combine on-device LLM processing with local visual recognition for gestures and facial recognition, alongside cloud-based AI features for more advanced interaction. There are 12 touch-sensitive zones across the body, autonomous navigation, obstacle avoidance, and self-charging support. It’s essentially a Tamagotchi crossed with a home robot, wrapped around a ChatGPT-style conversational system. And somehow, it still isn’t the weirdest thing SwitchBot has shown off lately. The company has spent the past year repositioning itself from a smart home accessories brand into what it calls an “AI-enabled embodied home robotics” company. At IFA 2025, the KATA Friends reveal arrived alongside the company’s AI Hub, a control system with OpenClaw baked in, designed to make smart home automation more conversational and context-aware. Then there’s Acemate, the AI tennis robot incubated by SwitchBot, which is essentially a robotic tennis coach. There’s definitely a market forming around emotionally aware AI hardware. Devices like Rabbit’s R1, Humane’s ill-fated AI Pin, and the growing wave of AI companion apps have shown the tech industry is increasingly obsessed with making AI feel personal rather than purely functional. SwitchBot’s approach just happens to involve giving that idea googly eyes and the ability to follow you around the house… just don’t get it wet or feed it after midnight (I’m not sure the latter is possible). At $700, it’s a pretty big outlay for something that could, theoretically, become jealous and sulk. Buried underneath the cuteness (and silliness) is a more serious industry trend though, one shifting toward personality and contextual awareness. CES 2026 was packed with AI robots… it wouldn’t surprise me at all if more brands follow SwitchBot’s lead and make their next wave of robots more “friendly”. Noa and Niko can be purchased now, direct from SwitchBot.
Images (6): 




|
|||||
| Hyundai to deploy 25,000 Atlas robots across US plants in … | https://interestingengineering.com/ai-r… | 10 | May 22, 2026 16:00 | active | |
Hyundai to deploy 25,000 Atlas robots across US plants in major pushURL: https://interestingengineering.com/ai-robotics/hyundai-25000-atlas-humanoid-robots-us-plants Description: Hyundai plans to deploy 25,000 Atlas humanoid robots from Boston Dynamics and expand US production capacity to 30,000 by 2028. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Discover the engineering revolution transforming modern defense with Strength, Stealth, Speed: The Very Fast Future of Advanced Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Future of Defense Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Hyundai also plans 300,000+ US-made actuators yearly, key components powering robot joints and movement. Hyundai plans to deploy more than 25,000 Atlas humanoid robots developed by Boston Dynamics in the US. The announcement came during a session hosted by JPMorgan Chase, where the automaker outlined its broader robotics manufacturing strategy. Hyundai said it aims to build an annual production capacity of 30,000 Atlas robots by 2028 and plans to manufacture key robot components locally, signaling a major expansion of humanoid robotics in automotive production. Yesterday, Boston Dynamics showed its Atlas humanoid learned heavy-object handling through reinforcement learning, simulations, torso rotation, and adaptive balance control during transport. Hyundai Motor Group (HMG) plans to deploy 25,000 Atlas humanoid robots developed by its subsidiary Boston Dynamics across Hyundai Motor and Kia manufacturing facilities. The company aims to reach an annual production capacity of 30,000 Atlas robots by 2028. Hyundai Motor Group also plans to manufacture more than 300,000 actuator units annually at factories in the United States. Actuators are critical robot components that function as joints and muscles, reports Yohan News Agency (YNA). The deployment forms part of HMG’s phased strategy to integrate humanoid robots into core automotive manufacturing operations. While the group confirmed plans to deploy over 25,000 Atlas robots, it did not disclose a detailed rollout timeline or specify which plants will receive the robots first. During overseas road shows, Song Ho-sung, chief executive officer of Kia Corporation, said the humanoid robots are expected to begin operations at Hyundai Motor Group Metaplant America in Georgia in 2028. Deployment at Kia’s Georgia plant is planned for 2029 as part of the broader robotics expansion strategy, reports YNA. Recently, Boston Dynamics detailed the technology behind its Atlas humanoid robot’s ability to lift and carry heavy industrial objects using reinforcement learning and large-scale simulation training. In a new technical blog, the company demonstrated Atlas rotating its torso 180 degrees, squatting to pick up a mini-fridge, and transporting it while dynamically adjusting to shifting internal weight. The behavior was developed within weeks of Atlas’ public debut earlier this year. The system relies heavily on reinforcement learning, where Atlas repeatedly practices tasks in simulation environments under varying conditions. Engineers altered object weight, floor friction, grip force, and object placement to train the robot to adapt to unpredictable scenarios. Boston Dynamics said Atlas accumulated millions of simulated training hours running in parallel on GPUs. Training begins with a reference trajectory generated through animation or teleoperation. Atlas then receives rewards for maintaining balance, grip stability, and successful task completion while exposed to disturbances. Once reliable in simulation, the behavior is transferred to the physical robot for testing and refinement. Unlike many humanoids that depend mainly on vision systems, Atlas uses proprioception, or internal body awareness, to monitor balance, resistance, grip pressure, and body motion in real time. This allows the robot to handle unstable loads more effectively. Boston Dynamics said the new Atlas platform reduces the “sim-to-real gap” through simplified hardware architecture, symmetrical limbs, and only two actuator types, improving simulation accuracy and real-world performance. Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Images (10): |
|||||
| GNN enhanced reinforcement learning for robot navigation in complex topological … | https://www.nature.com/articles/s41598-… | 10 | May 22, 2026 08:00 | active | |
GNN enhanced reinforcement learning for robot navigation in complex topological networks | Scientific ReportsDescription: To address the challenges encountered by intelligent robots in perceiving high-dimensional environmental states and making adaptive trajectory planning decisions in complex topological environments, this paper presents a Graph Neural Network–Reinforcement Learning (GNN-RL) integrated framework, implemented based on the Soft Actor-Critic (SAC) algorithm for continuous control tasks. First, leveraging the topological modeling capability of GNNs, environmental entities are abstracted into graph nodes, and their spatial constraints and semantic associations are encoded as edge features. Through multi-layer graph convolution and adaptive edge weighting, high-dimensional structured environmental information is compressed into low-dimensional node-level and graph-level embeddings with rich topological semantics. This provides structured environmental cognition for the subsequent reinforcement learning module, alleviating the curse of dimensionality and enabling efficient action selection. Second, a dynamic collaborative mechanism between the GNN encoder and the SAC-based RL agent is established. The topological features extracted by the GNN are fed as input to the RL agent, which consists of twin Q-networks, a policy network, and a value network. A multi-objective reward function, which integrates safety, progress, and motion smoothness, guides the agent’s trial-and-error exploration. In this manner, static topological representations are transformed into dynamic trajectory policies, while the GNN parameters are jointly optimized end-to-end via the gradient signals from the RL loss function, overcoming the limitations of purely static graph learning. Finally, comprehensive comparative experiments are conducted in simulated complex topological environments, evaluating the proposed GNN-RL approach against DQN, PPO, and A* algorithms. The results show that the GNN-RL method achieves a favorable balance between perception accuracy and decision-making efficiency, providing a reliable and adaptive solution for robot navigation and trajectory planning in structured, dynamic environments. Content:
Thank you for visiting nature.com. You are using a browser version with limited support for CSS. To obtain the best experience, we recommend you use a more up to date browser (or turn off compatibility mode in Internet Explorer). In the meantime, to ensure continued support, we are displaying the site without styles and JavaScript. Advertisement Scientific Reports (2026) Cite this article 456 Accesses 1 Altmetric Metrics details We are providing an unedited version of this manuscript to give early access to its findings. Before final publication, the manuscript will undergo further editing. Please note there may be errors present which affect the content, and all legal disclaimers apply. To address the challenges encountered by intelligent robots in perceiving high-dimensional environmental states and making adaptive trajectory planning decisions in complex topological environments, this paper presents a Graph Neural Network–Reinforcement Learning (GNN-RL) integrated framework, implemented based on the Soft Actor-Critic (SAC) algorithm for continuous control tasks. First, leveraging the topological modeling capability of GNNs, environmental entities are abstracted into graph nodes, and their spatial constraints and semantic associations are encoded as edge features. Through multi-layer graph convolution and adaptive edge weighting, high-dimensional structured environmental information is compressed into low-dimensional node-level and graph-level embeddings with rich topological semantics. This provides structured environmental cognition for the subsequent reinforcement learning module, alleviating the curse of dimensionality and enabling efficient action selection. Second, a dynamic collaborative mechanism between the GNN encoder and the SAC-based RL agent is established. The topological features extracted by the GNN are fed as input to the RL agent, which consists of twin Q-networks, a policy network, and a value network. A multi-objective reward function, which integrates safety, progress, and motion smoothness, guides the agent’s trial-and-error exploration. In this manner, static topological representations are transformed into dynamic trajectory policies, while the GNN parameters are jointly optimized end-to-end via the gradient signals from the RL loss function, overcoming the limitations of purely static graph learning. Finally, comprehensive comparative experiments are conducted in simulated complex topological environments, evaluating the proposed GNN-RL approach against DQN, PPO, and A* algorithms. The results show that the GNN-RL method achieves a favorable balance between perception accuracy and decision-making efficiency, providing a reliable and adaptive solution for robot navigation and trajectory planning in structured, dynamic environments. This work was funded by the Natural Science Foundation of Hunan Province of China (Grant No.2025JJ70191), Hunan Provincial Undergraduate Teaching Reform Research Project (Grant No.202401001576),Hunan Provincial Undergraduate Teaching Reform Key Research Project(Grant No.HNJG-2023B02), Scientific Research Project of Hunan Provincial Department of Education (Grant No. 25B0840),Scientific Research Project of Hunan Provincial Department of Education (Grant No. 24B0842). School of Intelligent Manufacturing and Mechanical Engineering, Hunan Institute of Technology, Hengyang, 421002, China Suo Zhang & Xuelin DU Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar Correspondence to Xuelin DU. The authors declare no competing interests. Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations. Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/. Reprints and permissions Zhang, S., DU, X. GNN enhanced reinforcement learning for robot navigation in complex topological networks. Sci Rep (2026). https://doi.org/10.1038/s41598-026-51938-5 Download citation Received: 16 March 2026 Accepted: 30 April 2026 Published: 20 May 2026 DOI: https://doi.org/10.1038/s41598-026-51938-5 Anyone you share the following link with will be able to read this content: Sorry, a shareable link is not currently available for this article. Provided by the Springer Nature SharedIt content-sharing initiative Advertisement Scientific Reports (Sci Rep) ISSN 2045-2322 (online) © 2026 Springer Nature Limited Sign up for the Nature Briefing: AI and Robotics newsletter — what matters in AI and robotics research, free to your inbox weekly.
Images (10): 


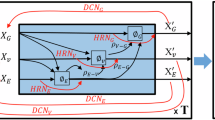
|
|||||
| UBTech's push for 10,000 humanoid robots by 2026 gets Siemens … | https://interestingengineering.com/ai-r… | 10 | May 21, 2026 08:00 | active | |
UBTech's push for 10,000 humanoid robots by 2026 gets Siemens backingURL: https://interestingengineering.com/ai-robotics/ubtech-siemens-humanoid-robot-production Description: UBTech partners with Siemens to accelerate humanoid robot production, targeting 10,000 units annually by 2026 amid rising global demand. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. UBTech taps Siemens’ digital manufacturing expertise to scale humanoid robot production to 10,000 units. Chinese robotics firm UBTech has signed a strategic cooperation agreement with Siemens Digital Industries Software to accelerate the large-scale manufacturing of humanoid robots and achieve an annual production capacity of 10,000 units in 2026. The agreement, signed in Shenzhen on March 16, focuses on integrating UBTech’s full-stack humanoid robotics capabilities with Siemens’ expertise in industrial digitalization and smart manufacturing. The partnership comes as demand for industrial humanoid robots continues to grow, pushing companies to move beyond prototypes toward scalable production. UBTech founder and CEO Zhou Jian said the company has seen a surge in orders this year, making mass production an urgent priority. “Mass production of tens of thousands of units has become a goal that we must achieve,” he said, adding that the collaboration with Siemens is a key step toward meeting that target. According to reports from Chinese automotive news platform Gasgoo and other industry outlets, Siemens will help UBTech design a comprehensive digital transformation roadmap covering the entire lifecycle, from research and development to full-scale production. The collaboration will rely heavily on Siemens’ industrial software portfolio, including tools for product design, simulation, process planning, and manufacturing management. These systems are expected to enable end-to-end digitization of UBTech’s operations, a critical requirement for scaling complex machines like humanoid robots. Humanoid robots combine precision engineering, AI systems, and motion control, making them significantly more complex to manufacture than conventional industrial robots. This complexity requires simulation-driven design, digital twins, and lifecycle management, areas where Siemens has decades of experience in global manufacturing. Shenzhen Daily notes that beyond technology integration, Siemens is also expected to provide technical training and support to help UBTech build the workforce capabilities needed for high-volume production. Globally, companies have demonstrated increasingly capable robots in recent years, but mass production remains a key bottleneck. UBTech has already begun moving in that direction. The company started delivering its Walker S2 industrial humanoid robots in 2025, marking an early step toward commercialization. At the same time, the company has reported strong market traction. In 2025, total orders for its humanoid robots exceeded 1.4 billion yuan, with applications spanning manufacturing and logistics, according to a Reuters report. Industry analysts say the next phase of competition will depend less on prototype performance and more on cost control, production efficiency, and real-world deployment at scale. For UBTech, achieving the 10,000-unit target would require not only higher production capacity but also improvements in supply chains, quality control, and system reliability, areas the Siemens partnership aims to address. Siemens’ Xcelerator platform and industrial software stack are designed to connect design, production, and operations into a unified digital workflow, potentially reducing time-to-market and improving consistency at scale. For UBTech, which has spent over a decade developing full-stack humanoid robot technologies, the partnership provides a pathway to translate technical capabilities into industrial output. More broadly, the deal signals increasing momentum in the humanoid robotics industry as companies race to prove that these machines can move from controlled demonstrations to reliable, scalable tools in factories. Kaif Shaikh is a journalist and writer passionate about turning complex information into clear, impactful stories. His writing covers technology, sustainability, geopolitics, and occasionally fiction. A graduate in Journalism and Mass Communication, his work has appeared in the Times of India and beyond. After a near-fatal experience, Kaif began seeing both stories and silences differently. Outside work, he juggles far too many projects and passions, but always makes time to read, reflect, and hold onto the thread of wonder. Premium Follow
Images (10): |
|||||
| DeSantis (again) slams House Speaker Perez for his ‘personal agenda’ | https://www.orlandoweekly.com/news/flor… | 0 | May 21, 2026 00:00 | active | |
DeSantis (again) slams House Speaker Perez for his ‘personal agenda’Description: The governor went on a verbal tear for nearly 10 minutes (with one break) to express anger and frustration with the Miami Republican. Content: |
|||||
| Sanctuary AI: Humanoid Robots Will Hit Homes In 3-7 Years | https://www.forbes.com/sites/johnkoetsi… | 6 | May 21, 2026 00:00 | active | |
Sanctuary AI: Humanoid Robots Will Hit Homes In 3-7 YearsDescription: We may want humanoid robots working in our homes, but we're going to have to wait at least three years, and maybe seven, before they're available at scale ... Content:
ByJohn Koetsier, Senior Contributor. Will the home be the last place the humanoid robot gets a job? According to Sanctuary AI CEO James Wells, probably yes. That’s a bit of a gut punch for those of us who want our clothes laundered, dishes done, floors cleaned, houses tidied and maybe even our meals made by robots with Genesis AI or Kyber Labs hands. Certainly 1X with its Neo robot and Figure are very interested in the idea that humanoid robots will soon be at work in our homes. Wells, however, isn’t buying it. I caught up with James Wells at Web Summit Vancouver this week. Sanctuary is Canada’s only homegrown humanoid robotics company and holds what Wells says is the third-largest IP portfolio in the space globally. What Wells told me just might reframe much of the current humanoid hype cycle. 1X, which just kicked off full-scale production of its humanoid robot Neo, is one of the robot makers that have explicitly targeted the home market. In fact, I know someone who has pre-ordered Neo, which is targeted to ship before the end of this year. I asked Wells point-blank whether 1X's Neo, which is being pre-sold for home deployment now, is doomed. He didn’t bite the way I expected. "I applaud their marketing initiative," he said, choosing his words with care. "Which is a marketing initiative." Then he laid out Sanctuary’s internal ranking of deployment environments by viability: unit economics, environment complexity, customer sophistication, safety tolerance. By every axis, the home ranks last on Sanctuary AI’s list. Home gets there eventually, but Wells thinks humanoid robots are at least three to five years out for full commercial viability at performance and cycle times that customers will accept. I happen to know that some humanoid robotics companies are already testing their robots in homes, and there are definitely some current challenges. Breakage is one, as is fall risk, especially in households with small pets or babies. A concern is something like turning an oven on and forgetting to turn it off. “In the industrial world, you need to be 99.999% repeatable,” says Wells. “Most of these foundation models get you to about 80% performance. So you can do a lot of different things, but not that well. So you’re dropping a glass one out of five times.” This gap — between viral demo and reliable operation over time — is the real gap keeping humanoid robots from showing up at scale in our homes. That said: the rate of improvement is incredibly fast. Building great hands that work well and don’t break down is another key factor for success in the home as well as the factory. “Hands are the gating factor for physical AI to proliferate into the world,” Wells says. “The holy grail continues to be dexterous manipulation across a wide range of tasks, but folks have gone kind of ground up versus top down, meaning: let’s figure out the legs part and mobility, which … when you talk to all the customers out there, there’s not a lot of commercial utility there.” Translation: walking is sexy. The fully humanoid form factor is appealing. But it’s not where the value is for industry. That’s not an isolated viewpoint. It’s why Sonny, the humanoid-ish robot-in-training at Tutor Intelligence in Boston, has wheels, not legs. It’s more stable, more predictable, takes less energy, cheaper, simpler, longer-lasting and allows you to utilize more weight – including a battery – to make the entire platform more stable and to allow the robot more working time before a required recharge. Most experts I talk to say traditional robotic solutions, automation solutions and wheeled robotics are better options for factories and logistics facilities than humanoids. But, let’s be honest, wheels can be hard in homes. I’m testing a new home vacuum right now and – guess what – it can’t navigate stairs. (In fact, despite being “multi-floor capable,” it gets confused when we carry it upstairs.) Although they’re not the only options for ascending and descending stairs, legs are one way to open up our entire homes for robots. Hands, on the other hand, are what Sanctuary has specialized in since 2018. Unlike most modern robot hands, Sanctuary AI’s are hydraulic: a super-contrarian bet. While almost the entire rest of the industry is going tendon-driven, electric-motor-actuated for hands, Sanctuary AI miniaturized hydraulic valves. They’re coin-sized, food-safe-oil-actuated and tested past two billion cycles without degradation. The company says they are 50x faster and 6x cheaper than off-the-shelf components and offer higher power density than electric motors. “We have a unique capability with hydraulic hands that no one else in the world is doing, that has superior cycle life, speed, strength, robustness,” Wells says. “But our AI control system can control our humanoid, other humanoids, but also off the shelf hardware.” All of which brought up another point: at some level, humanoid robots aren’t products. They are labor, and that means they are GDP. I’m currently tracking pretty much every company, robot, investor, and funding round in the humanoid robot space, and the geographic concentration is stark: China leads, the U.S. is second, Japan, Germany, Korea and the UK are in the race, but both South America and Africa are not even in the game. Wells thinks robotics domination – both traditional and humanoid – is how China sees a path to push its share of global manufacturing from roughly 60% to 80%. In fact, he recently talked with Canada’s first-ever minister of AI about it: “If you do nothing, you will be forced to buy Chinese robots with AI brains that Canadian business will hire and you will hollow out the entire economy." The same is true for the United States and pretty much any other modern industrial society. The big question, whether for industry or home, is when we’ll see the iPhone moment in humanoid robots. Or, the ChatGPT moment: the point in time at which it becomes incredibly obvious that a massive phase shift in technology and capability is happening right now. There may not just be one, Wells says: "There’s going to be moments along the way," he said. "Task by task. Unlock a group of tasks, unlock another group of tasks." The endgame is what researchers call zero-shot learning: a robot walks into a brand-new situation and immediately starts doing useful work. The bare facts are that we’re not there yet, and it’s unclear when we will be. The reality is also, however, that we’re moving forward quickly.
Images (6):
|
|||||
| STMicroelectronics and eYs3D Microelectronics to showcase | https://www.globenewswire.com/news-rele… | 5 | May 18, 2026 16:00 | active | |
STMicroelectronics and eYs3D Microelectronics to showcaseDescription: STMicroelectronics and eYs3D Microelectronics to showcase collaboration on high-quality 3D stereo-vision camera for machine vision and roboticsat CES 2023 ... Content:
January 02, 2023 09:00 ET | Source: STMicroelectronics N.V. STMicroelectronics N.V. STMicroelectronics and eYs3D Microelectronics to showcase collaboration on high-quality 3D stereo-vision camera for machine vision and roboticsat CES 2023 Geneva, Switzerland, and Taipei, Taiwan, January 2, 2023 – STMicroelectronics (NYSE: STM), a global semiconductor leader serving customers across the spectrum of electronics applications, and eYs3D Microelectronics, a fabless semiconductor design house that focuses on end-to-end hardware and software systems for computer vision, including advanced vision-processing System-on-Chip (SoC) devices, will reveal the results of their collaboration on high-quality machine vision at CES 2023 in Las Vegas on January 5-8. Using live demonstrations, the companies will show how stereo video and depth camera made from advanced active-coded infrared technology can enhance capabilities like feature recognition and autonomous guidance at mid-to-long working range. “STMicroelectronics’ advanced image sensors, using proprietary process technologies, offer class-leading pixel size while offering both high sensitivity and low crosstalk,” said James Wang, Chief Strategy & Sales Officer, eYs3D Microelectronics. “Such high-performance image sensors at a competitive price point enable us to achieve extremely compact system size while ensuring outstanding machine-vision performance. The strong connection we have established with ST increases our confidence to develop new products that will lead the machine vision market.” “The collaboration with eYs3D Microelectronics, through their expertise in capture, perception understanding, and 3D-fusion, offers ST additional business opportunities, use cases, and ecosystems addressing demands for stereo vision in applications such as robots, home-automation, home appliances, and many others,” said David Maucotel, Business Line Manager at ST’s Imaging Sub-Group. “While the reference designs showcased at CES are using monochromatic sensors, we can already foresee exciting enhancements and further use-cases using the RGB and RGB-IR versions of our sensors.”The CES demonstrations highlight two jointly developed reference designs, the Ref-B6 and Ref-B3 ASV (Active Stereo Vision) video and depth cameras. Both combine the eYs3D CV processor and eSP876 stereo 3D Depth-Map chipset with ST’s global shutter image sensors that provide enhanced near-infrared (NIR) sensitivity. The embedded eYs3D chipset enhances object edge detection, optimizes depth de-noising, and outputs HD-quality 3D depth data up to 60 fps frame rate. ST’s image sensors enable the cameras to output data streams in various combinations of video/depth resolution and frame rate for the best quality depth sensing and point-cloud creation. In addition, optimized lenses, filters and a VCSEL active-IR projector source optimize the infrared optical path and maximize immunity to ambient light noise. A specially developed control algorithm turns the IR projector on and off alternately to permit capturing artifact-free gray scale images. Leveraging this advanced hardware design, the Ref-B6 stereo-video camera achieves a 6-centimeter baseline and 85deg(H) x 70deg(V) depth field of view.Both eYs3D reference designs include the SDK (Software Development Kit) supporting Windows®, Linux and Android OS environments with multiple different programming languages and wrapper APIs. eYs3D will showcase the joint development Ref-B6 Depth Camera at two booth locations: LVCC, Booth #15769, Central Hall and Venetian, Eureka Park, Booth #62500, AT1, Hall G. Please contact your local sale representatives or sales@eys3d.com to arrange appointments and customer presentations. Note to Editors: Artificial Intelligence of Things (AIoT) is the combination of artificial intelligence (AI) technologies and the Internet of Things (IoT) infrastructure. A point cloud is a discrete set of data points in space. The points may represent a 3D shape or object. About STMicroelectronicsAt ST, we are 48,000 creators and makers of semiconductor technologies mastering the semiconductor supply chain with state-of-the-art manufacturing facilities. An integrated device manufacturer, we work with more than 200,000 customers and thousands of partners to design and build products, solutions, and ecosystems that address their challenges and opportunities, and the need to support a more sustainable world. Our technologies enable smarter mobility, more efficient power and energy management, and the wide-scale deployment of the Internet of Things and connectivity. ST is committed to becoming carbon neutral by 2027. Further information can be found at www.st.com. Further information can be found at www.st.com. About eYs3D Microelectronics eYs3D Microelectronics Corp. pioneers in 3D sensing technologies, and aims to develop semiconductor oriented technologies and products related to 3D vision-simulating computer vision technologies integrated with computer intelligence. With its strong foundations and experiences in memory design and computer vision, as well as close co-operations with its parent company- Etron Technology, Inc., and ARM Holdings Plc. The company focuses on computer vision processors and specializes in 3D stereo vision solutions. As one of the earliest ventures in 3D technology, eYs3D was designed-in with multiple tier-one brands in VR, robotics and IoT devices. eYs3D’s state-of-the-art stereo vision depth IC and module offer customers more integrated value in bringing 3d sensing into real applications, realizing computer vision with human perception incorporated with A.I. For further information visit www.eys3d.com Press contacts: eYs3DOlivia WuCorporate Media RelationsEmail: marketing@eys3d.comSTMicroelectronicsMichael MarkowitzDirector Technical Media RelationsTel: +1 781 591 0354Email: michael.markowitz@st.com Attachments STMicroelectronics brings always-on vision to next-generation personal electronics with new ultralow-power image sensors VD55G4 and VD65G4 extend the ST BrightSense portfolio with compact,... STMicroelectronics apporte la vision « toujours active » à l’électronique personnelle de nouvelle génération avec de nouveaux capteurs d’image à très faible consommation ...
Images (5): 
|
|||||
| Rhoda AI Raises $450M to Advance Industrial Robot AI | https://ventureburn.com/rhoda-ai-raises… | 10 | May 18, 2026 16:00 | active | |
Rhoda AI Raises $450M to Advance Industrial Robot AIURL: https://ventureburn.com/rhoda-ai-raises-450-million/ Description: Rhoda AI Raises $450 million to train industrial robots using internet-scale video and enable autonomous real-world operations. Content:
By Clinton Key Takeaways Rhoda AI closes $450 million Series A financing led by Premji Invest. Platform enables robots to operate autonomously in real-world, high-variability environments. Funding will scale AI models trained on internet videos for industrial robotics. Rhoda AI just raised $450 million in a round led by Premji Invest, pushing the company’s value up to $1.7 billion. Big names like Khosla Ventures, Temasek Holdings, and John Doerr also joined in. What sets Rhoda apart? The company trains its AI models on millions of internet videos, giving robots the know-how to tackle jobs in real factories and warehouses, not just in perfectly controlled labs. Jagdeep Singh, who used to run QuantumScape, started Rhoda to close the gap between digital AI and real-world robotics. Most old-school robots depend on teleoperation—basically, people steering robots from afar. That limits how much data they can learn from, and honestly, it leaves them struggling when things get unpredictable. Rhoda does things differently. Their method, Direct Video Action (DVA), first pre-trains AI models using huge online video libraries. Then, they fine-tune the system with actual robot data. This combo helps their robots handle all kinds of objects, positions, and even mistakes. The machines keep learning—watching, predicting, acting, and then checking their results—over and over, so they get smarter each time. Rhoda launched publicly after 18 months in stealth, unveiling FutureVision. This intelligence layer enables robots to operate autonomously across industrial workflows. Unlike conventional AI, FutureVision adapts dynamically to shifting layouts, unseen objects, and unpredictable conditions. In production trials, Rhoda completed complex component-processing workflows in under two minutes per cycle without human intervention. The platform demonstrated reliability in high-variability settings, surpassing key performance targets set by industrial partners. CEO Jagdeep Singh emphasised that the model’s advantage lies in learning from real-world video, not just pre-programmed sequences. “We aim to build robots that work in everyday environments, not just labs,” Singh said. By training on diverse internet data, the platform captures edge cases and generalises efficiently. Rhoda AI secures $450 million to expand autonomous industrial robots, research generative AI, and deploy Physical AI at scale. Source: Created by Ventureburn The $450 million Series A will support scaling industrial deployments, piloting with partners, and growing Rhoda’s team. The company plans to invest in research across generative AI, computer vision, and robotics engineering. Sandesh Patnam, Managing Partner at Premji Invest, noted that early deployment creates a “data flywheel” for continuous improvement. The funding enables Rhoda to capture real-world edge cases and refine robot behaviour at scale. The company also plans to license its AI model across various hardware and software platforms. Rhoda is positioned in the emerging Physical AI sector. Physical AI allows machines to perceive, reason, and act in real time. Beyond robotics, the field includes autonomous vehicles, adaptive assembly lines, robotic surgery, and smart buildings. Rhoda’s platform exemplifies systems that can think and act in unstructured environments. More News: Rebar Raises $14M to Expand AI Platform for HVAC and Construction Workflows Rhoda’s proprietary DVA model integrates perception and control, providing continuous feedback and physics-aware execution. FutureVision serves as the foundation for autonomous operations and is expected to power multiple industrial deployments. The company plans to eventually produce humanoid-style robots and develop in-house hardware to ensure quality for real-world tasks. By combining internet-scale pretraining with real-world adaptation, Rhoda allows robots to complete complex industrial tasks with minimal supervision. Rhoda AI has pulled in big-name investors like Capricorn Investment Group, Khosla Ventures, Leitmotif, Matter Venture Partners, Mayfield, Premji Invest, Prelude Ventures, Temasek, and Xora. The team brings together top talent in robotics, computer vision, and generative AI—these are folks who’ve worked at leading research labs and tech giants. Right now, Rhoda AI stands ready to push industrial robotics into its next chapter. By combining large-scale video pretraining with closed-loop predictive control, the company enables autonomous, adaptive, and scalable robot operations. To stay updated on crypto venture capital funding and market trends, visit our venture capital news section for more insights. Clinton Clinton Nwachukwu is a crypto and finance writer with an MBA in Artificial Intelligence and 6+ years of experience creating content for leading global brands. He turns complex topics into clear, actionable insights for readers worldwide. Disclaimer VentureBurn is a media platform covering the latest in cryptocurrency, artificial intelligence, venture capital, and the startup ecosystem. Opinions expressed on VentureBurn are for informational purposes only and do not constitute investment advice. Before making any high-risk investments in digital assets or emerging technologies, readers should conduct their own due diligence. All transactions and financial decisions are made at your own risk, and any losses incurred are solely your responsibility. VentureBurn does not endorse or recommend the buying or selling of any digital assets and is not a licensed investment advisor. Please note that VentureBurn may participate in affiliate marketing programs. Editor's Choice 10 Best Decentralized Crypto Exchanges (DEXs) in 2026 12 Crypto Exchanges with the Lowest Fees Comparison 13 Best Crypto Card Options in 2026: Debit & Credit Ranked Cowboy Space Corporation Raises $275M in Funding Round 10 Easiest Crypto to Mine: Best Profitable Coins In May 2026 Table of Contents Related articles Vector Raises $10M To Scale AI Driven Contact Level Advertising Oishii Raises $150M To Scale Indoor Smart Farm Model gaiia Raises $40M To Expand AI-Native Telecom Operations Platform Pillar Raises €12M To Modernise Construction Operations Meatly Raises £10.4M Series A To Scale Cultivated Meat Production Latest crypto news Join the Binance EDGE Trading Competition Now To Share in $100K Rewards. Contest Guide Join the Binance Wallet On-Chain Trade & Win Season 3 Win Up To 15 BNB or 88 SOL How Ethereum Casinos Are Driving Payment Innovation WIRobotics Raises $68M To Scale Wearable And Humanoid Robotics Platform Exponent Raises $40M To Build Financial Platform For Franchise Operators Crew Carbon Raises $25M To Scale Wastewater Decarbonisation Technology GovWell Secures $25M Series A From Insight Partners Novella Raises $21M to Scale AI Insurance Brokerage Cash App’s Strategy Shifts And Its Help In Company Growth GridCARE Raises $64M to Launch AI Energy Category VentureBurn is a global news and insights platform covering the latest trends and developments across the technology landscape – including cryptocurrency, artificial intelligence, venture capital, and startups. Our mission is to empower entrepreneurs, investors, and tech enthusiasts with high-quality journalism, practical guides, and expert analysis to navigate and thrive in the rapidly evolving innovation economy. Category About Subcribe to our newletter Top tech news & guides in crypto, AI, VC, and startups — weekly in your inbox.
Images (10): 


|
|||||
| Robot Talk Episode 155 – Making aerial robots smarter, with … | https://robohub.org/robot-talk-episode-… | 10 | May 18, 2026 16:00 | active | |
Robot Talk Episode 155 – Making aerial robots smarter, with Melissa Greeff - RobohubURL: https://robohub.org/robot-talk-episode-155-making-aerial-robots-smarter-with-melissa-greeff/ Content:
Claire chatted to Melissa Greeff from Queen’s University about autonomous navigation and learning for drones. Melissa Greeff is an Assistant Professor in Electrical and Computer Engineering at Queen’s University. She leads Robora Lab and is also an Ingenuity Labs Robotics and AI Institute member. Her research interests include aerial robots, vision-based navigation, and safe learning-based control. Melissa’s expertise is in building autonomous aerial systems including previous experience in conducting field trials at various locations across Canada. She was listed as one of 50 women in robotics you need to know about in 2023 by the Women in Robotics organization.
Images (10): 



|
|||||
| Tesla Optimus: Humanoide Roboter als nächste Plattform | https://www.industrial-explorer.de/tesl… | 10 | May 18, 2026 16:00 | active | |
Tesla Optimus: Humanoide Roboter als nächste PlattformDescription: Tesla will mit Optimus den humanoiden Robotermarkt prägen. Daten, KI und Skalierung könnten Kosten senken und neue Anwendungen eröffnen. Content:
Anbieter zum Thema Vom Automobilhersteller zum Robotik-Konzern? Was bei Tesla lange wie eine Vision von CEO Elon Musk klang, nimmt inzwischen konkrete Formen an. Steht hier die nächste große Plattform vor dem Durchbruch? Der globale Markt für humanoide Roboter steckt noch in den Anfängen, doch die Wachstumserwartungen sind außergewöhnlich. Analysten von Goldman Sachs schätzen, dass der Markt bis 2035 ein Volumen von 150 bis 200 Milliarden US-Dollar erreichen könnte, bei jährlichen Wachstumsraten von über 40 Prozent. Bis 2030 könnten weltweit über eine Million humanoide Roboter im Einsatz sein – zunächst in Industrie, Logistik und Pflege, später auch im Dienstleistungssektor. Zum Vergleich: Der heutige Markt für Industrieroboter umfasst rund 16 Milliarden US-Dollar jährlich. Humanoide Roboter würden diese Kategorie strukturell erweitern. Nicht ersetzen, sondern ergänzen. Im Zentrum der Aufmerksamkeit steht Tesla. Mit dem humanoiden Roboter Optimus verfolgt der Konzern einen radikal anderen Ansatz als klassische Robotik-Hersteller. Während Wettbewerber auf spezialisierte Aufgaben setzen, will Tesla eine universell einsetzbare Arbeitskraft entwickeln. Optimus ist rund 1,73 Meter groß, wiegt etwa 70 Kilogramm, kann laut Tesla bis zu 20 Kilogramm tragen und wird von denselben KI-Systemen gesteuert wie Teslas Fahrzeuge. Melden Sie sich an oder registrieren Sie sich und lesen Sie weiter Um diesen Artikel vollständig lesen zu können, müssen Sie registriert sein. Die kostenlose Registrierung bietet Ihnen Zugang zu exklusiven Fachinformationen. Kostenlosen Account erstellen Sie haben bereits ein Konto? Hier einloggen Melden Sie sich an oder registrieren Sie sich und lesen Sie weiter Um diesen Artikel vollständig lesen zu können, müssen Sie registriert sein. Die kostenlose Registrierung bietet Ihnen Zugang zu exklusiven Fachinformationen. Sie haben bereits ein Konto? Hier einloggen Weiterführende Inhalte Humanoide Robotik Partystimmung? Hört auf zu tanzen, liebe Roboter! Doppelt interessant! Elon Musk kombiniert Spacex mit XAI und Gegner Waymo rüstet auf Impressum Cookie-Manager Datenschutz Barrierefreiheit AGB Hilfe Mediadaten KI-Leitlinien Autoren Copyright © 2026 Vogel Communications Group Diese Webseite ist eine Marke von Vogel Communications Group. Eine Übersicht von allen Produkten und Leistungen finden Sie unter www.vogel.de
Images (10): /cdn4.vogel.de/infinity/white.jpg)
|
|||||
| Soft robot detects touch and movement using human-inspired sensing | https://interestingengineering.com/ai-r… | 10 | May 18, 2026 16:00 | active | |
Soft robot detects touch and movement using human-inspired sensingURL: https://interestingengineering.com/ai-robotics/soft-robot-sixth-sense-camera-free-navigation Description: Soft robot system gains a human-like sixth sense to detect touch and navigate without cameras. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Researchers built soft robots that sense touch and movement without using cameras or external tracking. Researchers at the National University of Singapore have developed a soft robot system that gives machines a human-like sense of body awareness, allowing them to detect touch, external forces, and movement without relying on cameras or external tracking systems. The research focuses on proprioception, often called the body’s “sixth sense,” which helps humans understand body position and movement without looking. The team recreated a similar capability in soft robots using what they call an “expected perception” framework. The system allows the robot to predict how its body should move and compare that prediction with real-time sensory feedback. Any mismatch signals external contact or environmental interaction. Researchers say this helps the robot distinguish between its own movement and outside forces, something that has long challenged soft robotics. To test the technology, the team equipped a flexible robot with liquid-metal-based sensors capable of measuring bending, strain, and deformation. The robot then used internal sensing to navigate and react to physical interactions in real time. “Soft robots, too, need proprioception,” said Professor Cecilia Laschi from the Department of Mechanical Engineering at the National University of Singapore. According to the researchers, traditional soft robots struggle because their strain sensors react both to their own movement and to outside contact, making it difficult to determine what is actually happening around them. The new framework addresses that issue by mimicking how the human brain predicts sensory feedback. The robot calculates its expected body position based on movement commands and compares it with sensor readings gathered from its flexible structure. Researchers tested the system in a maze-navigation experiment where the robot moved autonomously without cameras. Instead, it relied entirely on touch and internal sensing to detect walls and adjust its movement path. In another test, a human operator guided the robot through movements similar to a massage or medical procedure performed on a manikin. The robot then learned and repeated those movements with high accuracy. “It could detect external contact within 0.4 seconds and distinguish its source with remarkable precision,” said Prof Laschi. “The robot also identified the direction of applied forces with an error margin below 10 degrees, even in dynamic environments.” The researchers believe the technology could improve human-robot interaction in healthcare, rehabilitation, and assistive robotics. Soft robots equipped with advanced sensing could eventually help elderly users, assist caregivers, or support surgeons during minimally invasive procedures. The team also sees applications in underwater robotics. Robots inspired by octopus arms, for example, could use touch-based perception to navigate environments where cameras may struggle due to darkness or poor visibility. “Robotics is inherently a cross-disciplinary field,” added Prof Laschi, pointing to the growing role of neuroscience, material science, artificial intelligence, and biology in shaping future robotic systems. Going forward, the researchers plan to improve the prediction system using machine learning models inspired by how human brains build internal representations from experience. The findings were published in Nature Communications. With over a decade-long career in journalism, Neetika Walter has worked with The Economic Times, ANI, and Hindustan Times, covering politics, business, technology, and the clean energy sector. Passionate about contemporary culture, books, poetry, and storytelling, she brings depth and insight to her writing. When she isn’t chasing stories, she’s likely lost in a book or enjoying the company of her dogs. Premium Follow
Images (10): |
|||||
| How PageSpeed LLM Impacts Content Selection | https://www.singlegrain.com/seo/how-pag… | 10 | May 18, 2026 15:59 | active | |
How PageSpeed LLM Impacts Content SelectionURL: https://www.singlegrain.com/seo/how-page-speed-impacts-llm-content-selection/ Description: Learn how PageSpeed LLM factors like latency, Core Web Vitals, and crawl cost shape AI answers. Discover performance tactics here. Content:
AI SEO that plans, writes & ranks - 90+ hours/month saved Personalized LinkedIn ads in minutes, not weeks. 40% higher B2B conversions. PageSpeed LLM is quietly reshaping which websites appear inside AI answers, summaries, and agents. You can have the best-written content in your niche, yet a slower stack or poorly tuned hosting layer can make LLMs reach for a competitor’s URL instead of yours. As answer engines factor in latency, freshness, and crawl cost, performance becomes a selection signal, not just a UX nicety. Understanding how these systems weigh speed, structure, and geography is now critical for any team that cares about organic visibility in AI surfaces. Large language models no longer rely solely on static training data scraped months ago. Many now blend pre-training with real-time crawling, search integration, and custom retrieval pipelines, which means your infrastructure and hosting choices can directly affect whether your pages are fetched, parsed, cached, and ultimately cited. This article connects web performance engineering, Core Web Vitals, and geolocation to LLM content selection, enabling marketing, SEO, and platform teams to make informed, measurable decisions. Advance Your SEO TABLE OF CONTENTS:How LLMs Select Web Content Behind the ScenesFour LLM retrieval modes to keep in mindPageSpeed LLM Content Selection DynamicsPageSpeed LLM mechanics inside AI crawlersGeolocation, Hosting, and Which Pages LLMs SurfaceRegional latency and AI answer variationsLocal and “near me” performance scenarios for teamsPerformance-First, LLM-Friendly Architecture and ContentRendering strategies for LLM crawlingPageSpeed LLM optimization checklist for dev and SEO teamsTesting How Performance Changes Your LLM VisibilityEstablishing your baseline: Performance plus AI presenceRunning controlled performance experimentsMonitoring, Tools, and Team WorkflowsDashboards that connect CWVs, logs, and AI citationsWhat web performance and SEO teams should ownTurning PageSpeed LLM Insights Into a Competitive AdvantageRelated Video How LLMs Select Web Content Behind the Scenes Para aquellos interesados en estrategias de marketing específicas, explorando ideas publicitarias de joyería puede ofrecer perspectivas valiosas sobre cómo impulsar las ventas en este sector. Before tuning performance, it helps to understand the fundamental ways LLMs touch the web. Each retrieval mode creates slightly different incentives around PageSpeed, structure, and availability. If you know which modes matter most for your audience, you can prioritize the right optimizations. Four LLM retrieval modes to keep in mind Modern models typically rely on a mix of offline and online data access. These are the four high-level patterns that matter for web performance planning. Pre-training and bulk crawling. Models are initially trained on large snapshots of the web obtained through bulk crawling. Here, crawl depth and frequency are influenced by how easy your site is to fetch and render; brittle, slow pages are less likely to be fully captured. Real-time browsing and “visit URL” tools. Some assistants can browse the live web to answer a specific prompt. When a user asks for a fresh comparison or a recent change, the model or its helper agent will follow links, obey robots directives, and respect timeouts. High latency or failed loads reduce the chance that your content is used in that answer. API connectors and integrations. LLM ecosystems are increasingly integrating with SaaS tools, documentation portals, and knowledge bases via APIs or search connectors. In these cases, endpoint response time and payload size strongly affect whether your content is considered usable inside time-constrained interactions. Retrieval-augmented generation (RAG). Many enterprise uses of LLMs rely on a RAG layer: vectors or keyword indices built from your content, paired with a retrieval service that feeds passages to the model. Retrieval performance, index freshness, and embedding latency all shape which pieces are surfaced when users ask questions. When teams design RAG systems on their own sites or documentation, they often discover how sensitive answer quality is to retrieval speed; the same sensitivity applies when external LLMs decide which public URLs to sample. Approaches that focus on LLM retrieval optimization for reliable RAG systems illustrate the same principle: the faster and cleaner your content is to access, the more consistently it is selected. PageSpeed LLM Content Selection Dynamics From the model’s perspective, every web request has a cost: time, tokens, and compute. Slow pages stretch latency budgets, increase timeout risk, and reduce the number of sources that can be consulted for a single answer. That cost pressure is why PageSpeed quietly shapes which URLs are preferred when multiple candidates could satisfy the same intent. Unlike traditional search ranking, where relevance and authority are discussed constantly, and performance is often treated as a secondary factor, LLM-driven systems must manage real-time interaction constraints. If an answer engine has a few seconds to respond, it may favor sources that consistently return usable HTML quickly over equally relevant sources that sometimes stall or require heavy client-side rendering. PageSpeed LLM mechanics inside AI crawlers Several familiar web performance metrics map cleanly to LLM behavior. While there is no public, universal threshold for any given platform, understanding what these metrics represent helps you reason about selection bias toward faster pages. Metric What it measures Likely impact on LLM retrieval Time to First Byte (TTFB) Server and network latency before the first byte of the response arrives High TTFB makes it harder for crawlers and browsing tools to stay within time budgets, so they may reduce crawl depth or abandon some requests. Largest Contentful Paint (LCP) How quickly the main content becomes visible to users When main text is delayed, bots that render pages may extract incomplete content or decide the page is not worth repeated visits. Interaction to Next Paint (INP) Responsiveness to user interactions Interactive tools built on LLMs, like agents or in-app browsers, may struggle with sluggish scripts and UI, leading to fewer interactions with your page. Cumulative Layout Shift (CLS) Visual stability as content loads Unstable layouts can make it harder for parsers to reliably locate headings, tables, and key text nodes when capturing your content. The key is that models and their surrounding systems often rely on machine-driven parsing and automated browsers. Clean, fast HTML with minimal blocking scripts makes their job easier, which increases the chance your page gets fully captured, cached, and reused across future answers. This is the performance layer of generative engine optimization and answer engine optimization, complementing traditional relevance and authority work. For organizations that know performance is a constraint but lack in-house expertise, partnering with specialists or reviewing an independent analysis of site speed optimization companies can accelerate the move from “good enough” to clearly superior latency in key regions. Advance Your SEO Geolocation, Hosting, and Which Pages LLMs Surface LLMs respond from data centers, but their upstream fetches still have to cross physical networks. Regional latency, CDNs, and data residency rules all shape which content is easiest for a user in a specific country to access. That means hosting architecture decisions can directly influence which domains and URLs appear in AI answers for different geographies. Regional latency and AI answer variations When users in different countries ask the same question, answer engines often have multiple viable sources. A documentation site hosted close to the model’s region, backed by a well-configured CDN, will typically respond faster than a similar site on a single distant server. Even without explicit favoritism, this relative speed can lead to different sources being selected because they fall within strict latency envelopes. Data residency and blocking add another wrinkle. If certain domains are slow or partially blocked in a jurisdiction, LLMs serving that region may implicitly downweight or avoid relying on them, even if their content is strong. Architectures that deploy replicas across multiple regions, align with local compliance requirements, and keep TLS handshakes fast give models greater confidence that they can reliably reach your content. Local and “near me” performance scenarios for teams Local-intent prompts, like “best coffee roaster near me” or “IT support in Berlin,” are increasingly answered by LLMs with a mix of directory data, reviews, and first-party business sites. When several candidates share similar ratings and descriptions, fast, stable sites can be more attractive retrieval targets than slow ones that risk timeouts or broken layouts in automated browsers. This creates a subtle competition between local business sites, aggregators, and maps or review platforms. A lightweight, well-structured local site served via a regional CDN node may be selected over a bloated directory page if the latter regularly triggers long TTFB or heavy client-side rendering in that geography. Treating local performance as part of a GEO strategy, rather than focusing solely on NAP data and reviews, helps capture emerging AI “near me” opportunities. Teams like Single Grain approach GEO (generative engine optimization) as both a content and infrastructure problem, aligning hosting, CDNs, and localization with the intent clusters they want to win in AI answers rather than viewing them as isolated projects. Performance-First, LLM-Friendly Architecture and Content Traditional UX optimization often focuses on how human users perceive speed: perceived load time, interactivity, and aesthetics. For LLMs and AI crawlers, the priority is different: fast access to clean, semantically structured HTML with minimal execution requirements. Aligning your architecture with that goal lets models extract what they need without fighting your front-end stack. Rendering strategies for LLM crawling Client-side rendering can be a major obstacle for AI systems that rely on automated browsers or headless fetchers, which have limited patience for complex JavaScript. If core content only appears after multiple script bundles execute, there is a higher chance that crawlers capture partial or empty pages. Server-side rendering or static generation, by contrast, ensures that the main text and headings are immediately available in the initial HTML payload. Pre-rendering HTML snapshots for key URL groups, such as documentation, product pages, and high-intent blog posts, can provide a fast path for both LLMs and traditional crawlers, while lazy-loading only non-essential widgets and interactive extras. A clear heading hierarchy and lean DOM also help models map your content into their internal topic graphs, a process explored in depth when aligning site architecture to LLM knowledge models through an AI topic graph. On the content side, ensuring that primary information lives in HTML text rather than being embedded in images or rendered entirely on the client makes extraction more reliable. When critical specs, pricing, or feature lists are buried in scripts or dynamically injected markup, answer engines may only see fragments of what you intended. For sites with complex product detail layouts, the same principles used in optimizing product specs pages for LLM comprehension apply: keep essential facts structured, close to the top of the document, and easy to parse without executing heavy code. PageSpeed LLM optimization checklist for dev and SEO teams To make this concrete, web performance and SEO teams can align on a shared checklist that focuses on machine readability and speed simultaneously. Each item can be translated into engineering tickets and acceptance criteria. Serve core content in the initial HTML. Headings, introductory copy, and key tables should render server-side so models can extract them without waiting for JavaScript execution. Keep TTFB and HTML size lean. Use caching, efficient frameworks, and CDN edge nodes to reduce backend latency and avoid bloated responses filled with unnecessary markup. Minimize render-blocking scripts and CSS. Defer non-critical JavaScript, split bundles, and inline only the CSS required for above-the-fold content so both users and bots see meaningful text quickly. Use semantic HTML and logical headings. Structured tags like <h2>, <h3>, <table>, and <ul> help automated parsers understand document sections, entities, and relationships. Limit DOM complexity on high-value pages. Excessive nested elements or countless nodes can slow down rendering and increase the chance that parsers miss important regions. Create lightweight variants for cornerstone content. For pages that attract a lot of AI-driven traffic, consider trimmed versions focused on factual clarity and speed, while richer interactive experiences can live elsewhere. When retrofitting existing content libraries, it is often faster to prioritize and refactor than to rewrite everything. Techniques for optimizing legacy blog content for LLM retrieval without rewriting it can be combined with this checklist to focus effort on the URLs most likely to influence AI answers. Advance Your SEO Testing How Performance Changes Your LLM Visibility Because LLM behavior is not fully transparent, many teams assume it cannot be optimized or measured. In practice, you can treat LLM visibility as an output metric and run controlled experiments, just as you would with conversion rates or search rankings. The key is to synchronize performance improvements with systematic observation of how often your pages are cited or surfaced. Establishing your baseline: Performance plus AI presence Start by assembling a baseline view of both technical and AI-facing signals. On the performance side, combine lab tools with real-user monitoring to understand TTFB, LCP, and other Core Web Vitals across your key regions. On the AI side, log which of your URLs appear in answers for a defined set of prompts relevant to your business, whether through manual testing or specialized tools. Some teams centralize this view by pairing their observability stack with dedicated LLM tracking software for brand visibility, which records when and where their content is cited across different models. Once this baseline exists, you can correlate it with performance changes over time rather than relying on anecdotes. Running controlled performance experiments With a baseline in place, treat PageSpeed improvements as experiments, not just refactors. This lets you answer questions like “Which optimizations actually increased our inclusion in AI answers?” instead of assuming all changes are equally valuable. Select a focused URL set. Choose groups of pages that target similar intents and currently appear occasionally or not at all in LLM answers, so shifts are easier to attribute. Define explicit performance goals. For each group, specify the latency and Core Web Vitals ranges you aim to reach, such as significantly lower TTFB in specific regions or more consistent LCP under realistic network conditions. Implement targeted optimizations. Apply changes like edge caching, SSR enablement, asset compression, or HTML simplification to one group, while leaving a comparable control group unchanged. Re-run standardized prompts. At scheduled intervals, query major models with the same prompt set, recording which sources and URLs they use, and whether they show your domain more often than before. Analyze patterns over time. Compare the experimental and control groups, looking for meaningful increases in citations, URL mentions, or paraphrased usage of your content that align with the performance gains. Iterating this process will build a playbook of which infrastructure and front-end changes have the highest impact on LLM selection for your specific domain, rather than guessing based on generic best practices. Monitoring, Tools, and Team Workflows Optimizing for PageSpeed in LLM interactions is not a one-time project; it is an ongoing collaboration among SEO, content, SRE, and application engineering. To keep improvements sustainable, teams need shared visibility and clear ownership lines so that performance regressions do not quietly erode AI visibility over time. Dashboards that connect CWVs, logs, and AI citations A useful pattern is to build a combined dashboard that pulls from web performance monitoring, server logs, and LLM tracking. One panel can show Core Web Vitals distributions and backend latency by region; another can list detected AI user agents and their crawl patterns; a third can summarize which pages are being cited in different answer engines. When this view is in place, anomalies become easier to spot. A sudden drop in AI citations for a group of URLs, coupled with a spike in TTFB or error rates in a particular region, quickly points to infrastructure issues. Likewise, increases in LLM references after a deployment that improved SSR coverage give concrete feedback that the work was worthwhile. What web performance and SEO teams should own Web performance and platform teams are best positioned to own low-level metrics like TTFB, error budgets, and JavaScript execution time. SEO and content teams, meanwhile, can lead on mapping high-value intents, identifying which URLs matter most for LLM inclusion, and defining the prompt sets used to test visibility. Each group should have explicit responsibilities that feed into a shared roadmap. Content strategists can also help prioritize which sections of long-form assets should be surfaced most prominently in HTML, while engineers ensure that these sections load quickly and reliably. When teams coordinate in this way, every sprint that improves performance also contributes directly to generative engine optimization outcomes rather than being treated as a pure infrastructure cost. If your organization wants outside support to align these disciplines, Single Grain frequently helps growth-focused companies run combined Core Web Vitals and AI visibility audits, then turn the findings into a pragmatic backlog. You can explore a tailored engagement or get a free consultation to benchmark your current position. Turning PageSpeed LLM Insights Into a Competitive Advantage LLM-driven experiences are making web performance a strategic visibility lever, not just a usability concern. When you understand how PageSpeed LLM dynamics influence crawling, caching, and citation decisions, you can design hosting, architecture, and content workflows that make your site the easiest and most reliable choice for AI systems to use. The path forward is to treat performance, geolocation, and machine readability as a single optimization surface. That means combining fast, regionally aware infrastructure with server-rendered, semantically rich HTML and a disciplined testing program that connects technical changes to shifts in AI answer patterns. As mentioned earlier, each organization’s results will differ, but the teams that measure will be the ones that discover which levers actually move their LLM presence. If you want a partner that already lives at the intersection of web performance engineering and AI-era search, Single Grain helps brands integrate SEVO, GEO, and technical optimization into one coherent strategy. Visit https://singlegrain.com/ to request a free consultation and turn PageSpeed LLM alignment into a durable growth advantage before your competitors do. Advance Your SEO Related Video https://www.youtube.com/watch?v=2Ru4DdRsfDA While technical performance is crucial, marketing teams should also focus on community-building efforts. For instance, employing proven tactics for Facebook group engagement can significantly boost brand visibility and audience interaction, complementing your SEO strategy. Understanding these dynamics is crucial for businesses aiming to optimize their digital presence. For instance, exploring innovative AI marketing strategies can provide valuable insights into how leading brands adapt to evolving digital landscapes. Ultimately, gaining visibility within LLM-generated content is only half the battle; the other half is converting that traffic. By focusing on optimizing your high-conversion marketing funnel, you can ensure that the audience you attract is effectively guided towards becoming customers. Frequently Asked Questions How is optimizing for LLM visibility different from traditional SEO and Core Web Vitals work? Traditional SEO focuses on ranking in search results and improving human-perceived speed, while LLM visibility requires making your content extremely fast and machine-readable under strict latency limits. The technical overlap is large, but prioritization shifts toward clean HTML, predictable response times, and content that can be reliably extracted without running complex front-end code. What are the early warning signs that poor page speed is hurting our presence in AI answers? Watch for patterns like your content being cited in some models but not others, competitors appearing more often in generic summaries, or AI tools favoring third-party aggregators over your first-party pages. When these shifts correlate with known performance issues or slow regions, it’s a strong indicator that latency is affecting selection. How should smaller sites with limited engineering resources approach PageSpeed LLM optimization? Smaller teams can get meaningful gains by using fast-managed hosting, a well-configured CDN, and a lightweight theme or framework instead of trying to custom-tune everything. Starting with a narrow set of high-intent pages and ensuring they are lean, static or server-rendered, and aggressively cached can deliver outsized visibility benefits. Which tool stack is best for ongoing LLM-focused performance monitoring? Combine a synthetic testing tool for repeatable lab benchmarks, a real-user monitoring solution for regional performance insights, and a log-based system that can identify AI-related user agents. Layer on an LLM citation tracker or prompt-testing tool so you can correlate technical metrics with how often your domain shows up in AI responses. How can we prioritize which pages to optimize first for LLM selection? Start with pages that sit closest to revenue or lead generation: documentation that drives adoption, comparison pages, core product or service overviews, and authoritative explainer content in your niche. Cross-reference these with any URLs already occasionally cited by AI tools, then focus initial performance work on the overlap. Are there risks in over-optimizing for speed when targeting LLMs? Yes, stripping pages down too aggressively can remove helpful context, internal links, or supportive media that both users and models rely on for nuance. The goal is to separate essential, fast-loading factual content from optional extras, not to sacrifice content quality or clarity in pursuit of microseconds. What should we ask potential vendors or agencies about their ability to improve PageSpeed for LLM visibility? Ask how they measure success beyond generic Core Web Vitals, including how they plan to track changes in AI citations or answer inclusion for your domain. Request examples of projects where they improved both regional latency and machine readability, and clarify how they’ll coordinate with your SEO and content teams rather than treating this as a purely DevOps project. If you were unable to find the answer you’ve been looking for, do not hesitate to get in touch and ask us directly. Advance Your SEO Para aquellos interesados en estrategias de marketing específicas, explorando ideas publicitarias de joyería puede ofrecer perspectivas valiosas sobre cómo impulsar las ventas en este sector. Before tuning performance, it helps to understand the fundamental ways LLMs touch the web. Each retrieval mode creates slightly different incentives around PageSpeed, structure, and availability. If you know which modes matter most for your audience, you can prioritize the right optimizations. Modern models typically rely on a mix of offline and online data access. These are the four high-level patterns that matter for web performance planning. When teams design RAG systems on their own sites or documentation, they often discover how sensitive answer quality is to retrieval speed; the same sensitivity applies when external LLMs decide which public URLs to sample. Approaches that focus on LLM retrieval optimization for reliable RAG systems illustrate the same principle: the faster and cleaner your content is to access, the more consistently it is selected. From the model’s perspective, every web request has a cost: time, tokens, and compute. Slow pages stretch latency budgets, increase timeout risk, and reduce the number of sources that can be consulted for a single answer. That cost pressure is why PageSpeed quietly shapes which URLs are preferred when multiple candidates could satisfy the same intent. Unlike traditional search ranking, where relevance and authority are discussed constantly, and performance is often treated as a secondary factor, LLM-driven systems must manage real-time interaction constraints. If an answer engine has a few seconds to respond, it may favor sources that consistently return usable HTML quickly over equally relevant sources that sometimes stall or require heavy client-side rendering. Several familiar web performance metrics map cleanly to LLM behavior. While there is no public, universal threshold for any given platform, understanding what these metrics represent helps you reason about selection bias toward faster pages. The key is that models and their surrounding systems often rely on machine-driven parsing and automated browsers. Clean, fast HTML with minimal blocking scripts makes their job easier, which increases the chance your page gets fully captured, cached, and reused across future answers. This is the performance layer of generative engine optimization and answer engine optimization, complementing traditional relevance and authority work. For organizations that know performance is a constraint but lack in-house expertise, partnering with specialists or reviewing an independent analysis of site speed optimization companies can accelerate the move from “good enough” to clearly superior latency in key regions. Advance Your SEO Advance Your SEO LLMs respond from data centers, but their upstream fetches still have to cross physical networks. Regional latency, CDNs, and data residency rules all shape which content is easiest for a user in a specific country to access. That means hosting architecture decisions can directly influence which domains and URLs appear in AI answers for different geographies. When users in different countries ask the same question, answer engines often have multiple viable sources. A documentation site hosted close to the model’s region, backed by a well-configured CDN, will typically respond faster than a similar site on a single distant server. Even without explicit favoritism, this relative speed can lead to different sources being selected because they fall within strict latency envelopes. Data residency and blocking add another wrinkle. If certain domains are slow or partially blocked in a jurisdiction, LLMs serving that region may implicitly downweight or avoid relying on them, even if their content is strong. Architectures that deploy replicas across multiple regions, align with local compliance requirements, and keep TLS handshakes fast give models greater confidence that they can reliably reach your content. Local-intent prompts, like “best coffee roaster near me” or “IT support in Berlin,” are increasingly answered by LLMs with a mix of directory data, reviews, and first-party business sites. When several candidates share similar ratings and descriptions, fast, stable sites can be more attractive retrieval targets than slow ones that risk timeouts or broken layouts in automated browsers. This creates a subtle competition between local business sites, aggregators, and maps or review platforms. A lightweight, well-structured local site served via a regional CDN node may be selected over a bloated directory page if the latter regularly triggers long TTFB or heavy client-side rendering in that geography. Treating local performance as part of a GEO strategy, rather than focusing solely on NAP data and reviews, helps capture emerging AI “near me” opportunities. Teams like Single Grain approach GEO (generative engine optimization) as both a content and infrastructure problem, aligning hosting, CDNs, and localization with the intent clusters they want to win in AI answers rather than viewing them as isolated projects. Traditional UX optimization often focuses on how human users perceive speed: perceived load time, interactivity, and aesthetics. For LLMs and AI crawlers, the priority is different: fast access to clean, semantically structured HTML with minimal execution requirements. Aligning your architecture with that goal lets models extract what they need without fighting your front-end stack. Client-side rendering can be a major obstacle for AI systems that rely on automated browsers or headless fetchers, which have limited patience for complex JavaScript. If core content only appears after multiple script bundles execute, there is a higher chance that crawlers capture partial or empty pages. Server-side rendering or static generation, by contrast, ensures that the main text and headings are immediately available in the initial HTML payload. Pre-rendering HTML snapshots for key URL groups, such as documentation, product pages, and high-intent blog posts, can provide a fast path for both LLMs and traditional crawlers, while lazy-loading only non-essential widgets and interactive extras. A clear heading hierarchy and lean DOM also help models map your content into their internal topic graphs, a process explored in depth when aligning site architecture to LLM knowledge models through an AI topic graph. On the content side, ensuring that primary information lives in HTML text rather than being embedded in images or rendered entirely on the client makes extraction more reliable. When critical specs, pricing, or feature lists are buried in scripts or dynamically injected markup, answer engines may only see fragments of what you intended. For sites with complex product detail layouts, the same principles used in optimizing product specs pages for LLM comprehension apply: keep essential facts structured, close to the top of the document, and easy to parse without executing heavy code. To make this concrete, web performance and SEO teams can align on a shared checklist that focuses on machine readability and speed simultaneously. Each item can be translated into engineering tickets and acceptance criteria. When retrofitting existing content libraries, it is often faster to prioritize and refactor than to rewrite everything. Techniques for optimizing legacy blog content for LLM retrieval without rewriting it can be combined with this checklist to focus effort on the URLs most likely to influence AI answers. Advance Your SEO Advance Your SEO Because LLM behavior is not fully transparent, many teams assume it cannot be optimized or measured. In practice, you can treat LLM visibility as an output metric and run controlled experiments, just as you would with conversion rates or search rankings. The key is to synchronize performance improvements with systematic observation of how often your pages are cited or surfaced. Start by assembling a baseline view of both technical and AI-facing signals. On the performance side, combine lab tools with real-user monitoring to understand TTFB, LCP, and other Core Web Vitals across your key regions. On the AI side, log which of your URLs appear in answers for a defined set of prompts relevant to your business, whether through manual testing or specialized tools. Some teams centralize this view by pairing their observability stack with dedicated LLM tracking software for brand visibility, which records when and where their content is cited across different models. Once this baseline exists, you can correlate it with performance changes over time rather than relying on anecdotes. With a baseline in place, treat PageSpeed improvements as experiments, not just refactors. This lets you answer questions like “Which optimizations actually increased our inclusion in AI answers?” instead of assuming all changes are equally valuable. Iterating this process will build a playbook of which infrastructure and front-end changes have the highest impact on LLM selection for your specific domain, rather than guessing based on generic best practices. Optimizing for PageSpeed in LLM interactions is not a one-time project; it is an ongoing collaboration among SEO, content, SRE, and application engineering. To keep improvements sustainable, teams need shared visibility and clear ownership lines so that performance regressions do not quietly erode AI visibility over time. A useful pattern is to build a combined dashboard that pulls from web performance monitoring, server logs, and LLM tracking. One panel can show Core Web Vitals distributions and backend latency by region; another can list detected AI user agents and their crawl patterns; a third can summarize which pages are being cited in different answer engines. When this view is in place, anomalies become easier to spot. A sudden drop in AI citations for a group of URLs, coupled with a spike in TTFB or error rates in a particular region, quickly points to infrastructure issues. Likewise, increases in LLM references after a deployment that improved SSR coverage give concrete feedback that the work was worthwhile. Web performance and platform teams are best positioned to own low-level metrics like TTFB, error budgets, and JavaScript execution time. SEO and content teams, meanwhile, can lead on mapping high-value intents, identifying which URLs matter most for LLM inclusion, and defining the prompt sets used to test visibility. Each group should have explicit responsibilities that feed into a shared roadmap. Content strategists can also help prioritize which sections of long-form assets should be surfaced most prominently in HTML, while engineers ensure that these sections load quickly and reliably. When teams coordinate in this way, every sprint that improves performance also contributes directly to generative engine optimization outcomes rather than being treated as a pure infrastructure cost. If your organization wants outside support to align these disciplines, Single Grain frequently helps growth-focused companies run combined Core Web Vitals and AI visibility audits, then turn the findings into a pragmatic backlog. You can explore a tailored engagement or get a free consultation to benchmark your current position. LLM-driven experiences are making web performance a strategic visibility lever, not just a usability concern. When you understand how PageSpeed LLM dynamics influence crawling, caching, and citation decisions, you can design hosting, architecture, and content workflows that make your site the easiest and most reliable choice for AI systems to use. The path forward is to treat performance, geolocation, and machine readability as a single optimization surface. That means combining fast, regionally aware infrastructure with server-rendered, semantically rich HTML and a disciplined testing program that connects technical changes to shifts in AI answer patterns. As mentioned earlier, each organization’s results will differ, but the teams that measure will be the ones that discover which levers actually move their LLM presence. If you want a partner that already lives at the intersection of web performance engineering and AI-era search, Single Grain helps brands integrate SEVO, GEO, and technical optimization into one coherent strategy. Visit https://singlegrain.com/ to request a free consultation and turn PageSpeed LLM alignment into a durable growth advantage before your competitors do. Advance Your SEO Advance Your SEO https://www.youtube.com/watch?v=2Ru4DdRsfDA While technical performance is crucial, marketing teams should also focus on community-building efforts. For instance, employing proven tactics for Facebook group engagement can significantly boost brand visibility and audience interaction, complementing your SEO strategy. Understanding these dynamics is crucial for businesses aiming to optimize their digital presence. For instance, exploring innovative AI marketing strategies can provide valuable insights into how leading brands adapt to evolving digital landscapes. Ultimately, gaining visibility within LLM-generated content is only half the battle; the other half is converting that traffic. By focusing on optimizing your high-conversion marketing funnel, you can ensure that the audience you attract is effectively guided towards becoming customers. Traditional SEO focuses on ranking in search results and improving human-perceived speed, while LLM visibility requires making your content extremely fast and machine-readable under strict latency limits. The technical overlap is large, but prioritization shifts toward clean HTML, predictable response times, and content that can be reliably extracted without running complex front-end code. Watch for patterns like your content being cited in some models but not others, competitors appearing more often in generic summaries, or AI tools favoring third-party aggregators over your first-party pages. When these shifts correlate with known performance issues or slow regions, it’s a strong indicator that latency is affecting selection. Smaller teams can get meaningful gains by using fast-managed hosting, a well-configured CDN, and a lightweight theme or framework instead of trying to custom-tune everything. Starting with a narrow set of high-intent pages and ensuring they are lean, static or server-rendered, and aggressively cached can deliver outsized visibility benefits. Combine a synthetic testing tool for repeatable lab benchmarks, a real-user monitoring solution for regional performance insights, and a log-based system that can identify AI-related user agents. Layer on an LLM citation tracker or prompt-testing tool so you can correlate technical metrics with how often your domain shows up in AI responses. Start with pages that sit closest to revenue or lead generation: documentation that drives adoption, comparison pages, core product or service overviews, and authoritative explainer content in your niche. Cross-reference these with any URLs already occasionally cited by AI tools, then focus initial performance work on the overlap. Yes, stripping pages down too aggressively can remove helpful context, internal links, or supportive media that both users and models rely on for nuance. The goal is to separate essential, fast-loading factual content from optional extras, not to sacrifice content quality or clarity in pursuit of microseconds. Ask how they measure success beyond generic Core Web Vitals, including how they plan to track changes in AI citations or answer inclusion for your domain. Request examples of projects where they improved both regional latency and machine readability, and clarify how they’ll coordinate with your SEO and content teams rather than treating this as a purely DevOps project. Eric Siu is a seasoned entrepreneur and CEO of the digital marketing agency Single Grain, which drives scalable and predictable revenue growth using paid ads, SEO, and content marketing. He has successfully scaled multiple businesses and assisted clients in various industries, including Amazon, Uber, and Salesforce, to do the same. Eric hosts two podcasts: Marketing School with Neil Patel and Leveling Up, where he dissects growth levers that help businesses scale. Follow him on Twitter @ericosiu. Our newsletter is brimming with marketing strategies that are working right now and must-have resources. Join our community of 15,000+ subscribers, including professionals from Amazon, Google, and Samsung. Join 15,000+ marketers getting proven strategies Single Grain is a full-service digital marketing agency that helps great companies grow their revenues online. Get in touch: contact@singlegrain.com © 2026 Single Grain. All rights reserved. Sitemap | Privacy Policy | Personal Data Removal Request | Notice of Non-Affiliation | Accessibility Get Free Instant Access 8 Effective Online Marketing Tactics That Have Generated 1,545%+ ROI for our Customers (and You Can Easily Use) We hate SPAM and promise to keep your email address safe. Personal attention guaranteed You'll hear back from me or one of our senior strategists directly. "Single Grain was instrumental to our growth. They're especially ahead of the game with AI." — Yaniv Masjedi, Co-Founder & CMO, Nextiva Trusted by teams at Amazon, Uber, Salesforce, and Airbnb ClickFlow’s AI plans and writes production-grade content — so you don’t need 10 more writers and editors. Early adopters average 27% more organic traffic in 6 months. Karrot generates personalized ads and landing pages for every target account in minutes, not weeks. One team closed 2 deals from just 15 accounts in under 2 weeks.
Images (10): 

|
|||||
| Portaltic.-Microsoft prueba ChatGPT en robots para que puedan interactuar con … | https://www.publimetro.com.mx/noticias/… | 0 | May 18, 2026 15:58 | active | |
Portaltic.-Microsoft prueba ChatGPT en robots para que puedan interactuar con humanosContent: |
|||||
| Naver to develop Arabic-based LLM, expand AI cooperation with Saudi … | https://koreatimes.co.kr/www/nation/202… | 1 | May 18, 2026 15:58 | active | |
Naver to develop Arabic-based LLM, expand AI cooperation with Saudi Arabia - The Korea TimesURL: https://koreatimes.co.kr/www/nation/2024/09/419_382484.html Description: Naver, the operator of Korea's largest internet platform, has signed an initial agreement with Saudi Arabia's artificial intelligence (AI) agency t... Content:
Naver's executives are seen at the Global AI Summit hosted by the Saudi Data & AI Authority in Riyadh, Saudi Arabia, in this photo provided by the Korean company, Sept. 12. Yonhap Naver, the operator of Korea's largest internet platform, has signed an initial agreement with Saudi Arabia's artificial intelligence (AI) agency to jointly develop an Arabic language-based large language model (LLM), company officials said Friday. During the Global AI Summit hosted by the Saudi Data & AI Authority (SDAIA) in Saudi Arabia's capital of Riyadh earlier this week, Naver and the SDAIA signed the memorandum of understanding (MOU) to cooperate in various sectors, including AI, cloud computing, data centers and robots, according to the officials. Under the MOU, the two sides plan to jointly develop an Arabic LLM, and technology solutions and services in the fields. SDAIA has been leading the Middle Eastern nation's ambitious plan of creating a technology-driven economy by 2030. Last year, Naver also struck a deal with the Saudi Arabian government to create a digital twin platform for Riyadh and four other Saudi cities. (Yonhap)
Images (1): 
|
|||||
| Robots sobre rodes | https://www.elperiodico.cat/ca/economia… | 10 | May 18, 2026 15:58 | active | |
Robots sobre rodesURL: https://www.elperiodico.cat/ca/economia/20260214/robots-rodes-126822487 Description: Els fabricants de vehicles posen el focus en la intel·ligència artificial i desenvolupen artefactes robòtics humanoides per competir més enllà dels mateixos cotxes. Honda i Toyota van ser de les primeres a mostrar la capacitat industrial creant-los amb diferents usos.. Musk va idear Optimus, que pot manipular objectes delicats, cuinar o transportar càrregues . La xinesa Chery Group va iniciar un projecte amb què equiparà els seus concessionaris Content:
i gaudeix dels avantatges de ser subscriptor El futur connectat Director de Motor de Prensa Ibérica Especialista en Periodista de motor centrat en el sector de l'automòbil i la motocicleta, així com en totes les árees d'economía relacionades amb la industria de l'automoció, la movilitat sostenible i l'electrifcació. Ubicada/t a Barcelona Alguns fins i tot tenen nom. Atlas, Mornine, Optimus, Iron, Asimo, Phoenix, Apollo..., tots semblen trets d’una pel·lícula de ciència-ficció. Blade Runner; Jo, robot, Transformers, i fins i tot Terminator, títols de cine d’èxit, els incorporarien en el seu repartiment. Però aquests són molt reals i venen sobre rodes. La irrupció de la intel·ligència artificial en el sector de l’automòbil (fa anys) ha derivat en la creació de dispositius de mobilitat pròpia, robots intel·ligents a priori controlats, amb un objectiu que ja va més enllà de demostrar que els fabricants de cotxes són bons en això de la tecnologia. Ja fa anys que les marques d’automoció mostren els seus avanços en robòtica. Honda i Toyota van ser de les primeres en mostrar la capacitat industrial creant humanoides i robots amb diferents usos. El 2000, Honda va presentar el seu projecte Asimo. Era un petit robot humanoide amb pinta d’astronauta que caminava, corria (a 9 km/h), pujava escales i interactuava amb humans. La seva última versió data del 2014 quan es va presentar a Europa amb els seus 1,3 metres d’altura i 50 quilos de pes. Reconeixia veus i sons, rostres i gestos, i rebia unes ordres simples. El 2008 va arribar a ser director per unes hores de l’Orquestra Simfònica de Detroit, en les albors de la IA aplicada a l’automoció. Apollo, el robot humanoide de Mercedes-Benz. / El violinista Entre el 2007 i el 2008, Toyota va mostrar al món els seus robots músics. El robot violinista. No li van posar nom, pobre. Era un humanoide d’1,5 metres d’altura dissenyat per Toyota Motor Corp, que va exhibir la seva destresa manual tocant el violí amb vibrato i moviments precisos. Tenia 17 articulacions i estava pensat per ser un assistent a la llar o en hospitals. Tot el treball de robòtica el va supervisar Gill Pratt, el CEO del Toyota Research Institute i exdirector d’un projecte de defensa en l’Agència de Projectes d’Investigació Avançada de Defensa dels EUA (DARPA). I és que Toyota té una llarga tradició en la robòtica aplicada al servei de les persones. I compta amb una divisió que desenvolupa pròtesis robòtiques amb finalitats mèdiques. Fa un parell d’anys, Zhang Guibing, màxim responsable de negoci internacional de l’automobilística xinesa Chery Group, va presentar el seu projecte de robòtica amb què la companyia pensa equipar els seus concessionaris del futur. El projecte desenvolupat per AiMoga (Ai per IA en anglès i Moga per Multi Objective Genetic Algorithm), ja té nom i parla: és Mornine (tot i que també respon al nom MoiMoi). Fa 1,65 metres i pesa 65 quilos. És l’únic robot amb IA de l’automoció amb aspecte humà. Fruit de la col·laboració de Chery amb Huawei, Nvidia i Horizon Robotics. La seva forma humanoide amaga un sofisticat sistema d’IA que intenta replicar al màxim la interacció social humana. Així, quan es parla amb Mornine, el robot no només interpreta les ordres de veu: també analitza el llenguatge del cos i l’entorn per respondre amb la màxima precisió gràcies al desenvolupament d’un cervell de doble nucli de DeepSeek. Té una autonomia de dues hores i una bateria de 0,7 KWh que es carrega en dues hores més. Es mou a una velocitat màxima d’un metre per segon i percep l’entorn que l’envolta gràcies a un conjunt de càmeres, sistema d’ultrasò i la tecnologia de detecció làser LiDAR. A més, està equipat amb IA tipus LLM, un model de llenguatge cognitiu (parla 10 idiomes) que li permet reconèixer patrons del llenguatge per generar una conversa tant natural com sigui possible. El seu àlter ego és a Tesla. És un model d’aspecte més agressiu. El seu nom: Optimus. Elon Musk ja el va mostrar de manera embrionària el 2021, tot i que va ser el 2025 quan el va posar a ballar. És un homenatge a Optimus Prime, el robot protagonista de Transformers. Optimus fa 1,73 metres i pesa 57 quilos. Pot caminar a 8 quilòmetres per hora i utilitza xarxes neuronals avançades per navegar. Té habilitats per manipular objectes delicats, cuinar, netejar i transportar càrregues, gràcies a mans de cinc dits i alta capacitat de càrrega. Funciona amb tecnologia de visió artificial i bateries de Tesla. L’objectiu és un robot bípede que millori la productivitat a les fàbriques des d’aquest any. Musk va anunciar que presentarà la versió Optimus 3, en la qual invertirà 20.000 milions. Hyundai Motor Group també es va apuntar, el 2025, a aquesta revolució. En el CES de Las Vegas, el fabricant coreà va presentar la seva estratègia de robòtica amb IA, que va més enllà dels vehicles i situa els robots com una eina estructural del seu futur industrial. El seu nom: Atlas. Hyundai també va mostrar robots creats amb els seus socis de Boston Dynamics: Spot i Stretch. Per a Hyundai no es tracta només de software o simulacions digitals, sinó de crear sistemes capaços de recopilar dades en fàbriques, centres logístics o instal·lacions industrials i prendre decisions de manera autònoma. S’implementarà el 2028. El 2024, BMW va firmar un acord amb la start-up de robòtica Figure per introduir els seus robots humanoides a la seva planta de Spartanburg, Carolina del Sud (EUA). Aquell any, Mercedes-Benz va firmar un acord similar amb Apptronik per experimentar amb el model Apollo, un robot bípede que pot aixecar fins a 25 kg. N’hi ha molts més, i d’altres que arribaran. L’últim en fer la seva aparició ha sigut Iron, l’humanoide presentat per la xinesa Xpeng. Ja ets subscriptor o usuari registrat? Inicia sessió Per disfrutar daquests continguts gratis has de navegar registrat. Intel Hyundai Honda Qui som Contacte RSS Mapa web Publicitat Avís legal Política de privacitat i cookies Preferències de privacitat Codi ètic Avís de transparència Administrar Utiq Altres webs de Prensa Ibérica Media: Casa Gourmet Coche Ocasión CompraMejor Cuore Diario Córdoba Diari de Girona Diario de Ibiza Diario de Mallorca Iberpisos El Día Tenerife Sport El Periódico de Aragón El Periódico de Catalunya El Periódico Extremadura El Periódico Mediterráneo Faro de Vigo Fórmula1 Guapísimas Iberempleos Información Alicante Información TV La Crónica de Badajoz La Nueva España La Opinión La Opinión La Opinión La Opinión La Provincia Levante Levante TV Empordà Comprovar Lotería de Nadal 2025 Mallorca Zeitung Premis Oscar 2025 Regió7 Stilo Superdeporte Tendencias21 Tucasa Viatjar Woman Cambalache
Images (10): 
|
|||||
| Un nuevo framework conecta modelos de lenguaje con ROS para … | https://wwwhatsnew.com/2026/04/04/ros-l… | 2 | May 18, 2026 15:58 | active | |
Un nuevo framework conecta modelos de lenguaje con ROS para que los robots entiendan órdenes en lenguaje natural y las ejecuten sin programación manualURL: https://wwwhatsnew.com/2026/04/04/ros-llm-framework-robots-lenguaje-natural-ordenes-acciones/ Description: Investigadores de Huawei Noah's Ark Lab, la Universidad Técnica de Darmstadt y ETH Zürich han desarrollado ROS-LLM, un framework open source publicado en Nature Machine Intelligence que conecta modelos de lenguaje (LLMs) con el Robot Operating System (ROS, la plataforma estándar para control de robots) para que las máquinas puedan interpretar instrucciones en lenguaje natural ROS-LLM conecta modelos de lenguaje con robots vía ROS: órdenes en lenguaje natural se convierten en acciones físicas. Open source, publicado en Nature Machine Intelligence. Content:
Publicado el 4 abril, 2026 Investigadores de Huawei Noah’s Ark Lab, la Universidad Técnica de Darmstadt y ETH Zürich han desarrollado ROS-LLM, un framework open source publicado en Nature Machine Intelligence que conecta modelos de lenguaje (LLMs) con el Robot Operating System (ROS, la plataforma estándar para control de robots) para que las máquinas puedan interpretar instrucciones en lenguaje natural y convertirlas en acciones físicas paso a paso. El sistema funciona así: un usuario da una orden como «coge el bloque verde y ponlo en la estantería negra». El LLM interpreta la instrucción, la descompone en acciones atómicas (acercarse, agarrar, mover, soltar) y las traduce a comandos ejecutables en ROS. Soporta tres modos de ejecución (código inline, árboles de comportamiento y máquinas de estados), puede aprender nuevas habilidades por imitación (un humano demuestra la tarea y el sistema la incorpora a su biblioteca de acciones), y mejora continuamente mediante reflexión con feedback humano y ambiental. Lo más relevante: no requiere que el usuario sepa programar. Un operador sin conocimientos técnicos puede dar instrucciones en lenguaje natural y el robot las ejecuta. El código es completamente open source, lo que significa que cualquier equipo de robótica puede integrarlo con su hardware existente. Mi valoración: la robótica lleva décadas atrapada en un cuello de botella: cada nueva tarea requiere que un ingeniero la programe manualmente. ROS-LLM no elimina ese cuello de botella (las acciones atómicas base sí las programan expertos), pero lo reduce drásticamente. Una vez que el robot tiene una biblioteca de habilidades básicas, un no-experto puede combinarlas con lenguaje natural para tareas que nadie anticipó. Que sea open source y compatible con ROS (el estándar de facto) significa que la adopción puede ser rápida. ¿Qué es ROS-LLM? Un framework open source que conecta modelos de lenguaje con ROS para que robots ejecuten órdenes en lenguaje natural. ¿Dónde se publicó? En Nature Machine Intelligence. Código open source disponible. ¿Necesito saber programar? No para operar el robot. Las acciones atómicas base las configuran expertos; después, cualquiera puede combinarlas con lenguaje natural. por Natalia Polo Análisis diario, herramientas y tutoriales sobre IA en wwwhatsnew.
Images (2): 
|
|||||
| Physical AI Matters More Than Humanoid Robots | https://www.forrester.com/blogs/physica… | 5 | May 18, 2026 15:58 | active | |
Physical AI Matters More Than Humanoid RobotsURL: https://www.forrester.com/blogs/physical-ai-matters-more-than-humanoid-robots/ Description: Forrester analysts Paul Miller and Charlie Dai discuss the importance of physical AI to robots, autonomous vehicles, and other types of physical automation in their new research report. Content:
Paul Miller , VP, Principal Analyst Writing about last year’s Hannover Messe, I made a point of calling out the small number of humanoid robots I saw at this huge industrial trade show. Fast-forward to 2026, and I’m about to jump on a plane to Germany for this year’s event. I know that I’m going to see a lot of humanoid robots. I know that most of them will be Chinese, a few will be European, and many of them will be impressive. And as Charlie Dai and I argue in our new report, I am confident that exhibitors’ and attendees’ apparent obsession with legs and arms misses the real story. Our new report, Physical AI Perceives, Reasons, And Acts In The Real World, argues that the more important story is really the growing capability of physical AI. Humanoid robots like those that my colleague Charlie Dai recently wrote about benefit from that, for sure, but so do many other types of physical automation — and most of them are cheaper, more durable, and more useful than the bundle of compromises required to squeeze batteries, computers, sensors, actuators, and more into a vaguely humanoid shape. I’ll be discussing the background to the report’s findings and answering questions in a client webinar on June 24: Sign up now to participate live or to receive the recording after we’re done. Physical AI is all about bringing AI into the real world, making AI aware of what’s happening around it, and giving AI the ability to affect — touch — that world. As we describe in the report, physical AI comprises four broad capabilities. Each is a huge field of fast-moving research in its own right, but something special happens when all four are brought together to deliver physical AI, which: I’ll be looking for evidence of physical AI throughout my week in Hannover, and I’ll blog about that (and other highlights of the show) once I’ve had time to digest everything I see. As always, if you have your own perspectives to share, please schedule a briefing and tell us all about them. If you’re a Forrester client and want to discuss (or challenge) our thinking on these topics, please schedule an inquiry or guidance session. Stay tuned for updates from the Forrester blogs. Stay tuned for updates from the Forrester blogs.
Images (5): 
|
|||||
| AWS et NEURA Robotics unissent leurs forces pour industrialiser l’IA … | https://www.lebigdata.fr/aws-et-neura-r… | 10 | May 18, 2026 15:58 | active | |
AWS et NEURA Robotics unissent leurs forces pour industrialiser l’IA physiqueDescription: AWS et NEURA Robotics s’allient pour industrialiser l’IA physique et accélérer le déploiement de robots cognitifs à grande échelle. Content:
Mariano R. 23 avril 2026 3 minutes de lecture Business & Transformation Avec leur alliance, NEURA Robotics et Amazon Web Services veulent avancer dans l’industrialisation de l’IA physique. Ils vont connecter robotique avancée et infrastructure cloud mondiale. L’objectif est de déployer des millions de robots cognitifs d’ici 2030. En s’associant, NEURA Robotics et AWS s’attaquent à l’un des défis les plus structurants du secteur. C’est celui de transformer des systèmes intelligents encore limités en solutions robustes qui opèrent à grande échelle dans des environnements industriels. Il sont convaincu que sans données réelles, sans puissance de calcul distribuée et sans validation terrain, l’IA physique restera cantonnée à des démonstrateurs. Ce partenariat va donc lever ces freins, et poser les bases d’une infrastructure globale. Les robots, les données et l’apprentissage continu fonctionneront de manière intégrée. Le partenariat s’articule autour de trois piliers complémentaires. D’abord, l’infrastructure. AWS hébergera le Neuraverse. Il s’agit de l’environnement numérique de NEURA qui centralise l’entraînement et le partage des données robotiques à grande échelle. Ensuite, le développement de l’IA. Les environnements NEURA Gym (des installations où les robots s’entraînent à des tâches complexes en simulation et conditions contrôlées ) seront connectés à Amazon SageMaker. Cette intégration va faire avancer la formation des modèles. Elle va aussi standardiser les processus d’apprentissage pour les partenaires industriels. Enfin, la validation terrain. Amazon explore déjà l’intégration des robots NEURA dans certains centres logistiques. Un terrain d’expérimentation stratégique, où les cas d’usage réels permettront d’affiner rapidement les capacités des robots. Par exemple la manutention, le tri, ou la collaboration homme-machine. Les modèles de langage sont nourris par des milliards de données issues d’Internet. Mais les robots, eux, souffrent d’un déficit structurel de données d’entraînement. Or, pour évoluer dans des contextes physiques imprévisibles, l’apprentissage doit s’appuyer sur des expériences concrètes. C’est précisément ce point que l’alliance cherche à adresser. NEURA apporte sa plateforme de robotique cognitive et sa couche d’intelligence, pour permettre aux machines de s’adapter en temps réel. De son côté, AWS met à disposition une infrastructure cloud mondiale. Celle qui collecte, traite et partage des volumes massifs de données entre flottes de robots. Ils souhaitent créer des boucles d’apprentissage continues entre simulation et réalité, afin d’accélérer la progression des systèmes. 🤖 @NEURARobotics and AWS announced a strategic agreement to accelerate Physical AI at scale, combining NEURA's cognitive robotics platform with AWS's cloud and AI infrastructure to help train, validate, and deploy the next generation of intelligent robots. 🔗… pic.twitter.com/oNt7PKDOwc Ce rapprochement répond à une problématique bien identifiée dans l’industrie. Celui de passer du prototype à la production. Déployer des robots intelligents ne se limite pas à concevoir du matériel performant. Cela exige une infrastructure robuste qui supporte l’apprentissage continu, la mise à jour des modèles et la gestion de flottes à grande échelle. La capacité de calcul d’AWS, sa couverture mondiale et son portefeuille de services d’IA en font un levier d’industrialisation. Pour NEURA, exécuter le Neuraverse sur cette infrastructure permet de raccourcir les cycles de développement. Cela va également rendre les performances reproductibles, quel que soit le contexte d’utilisation. Ce partenariat illustre aussi la convergence entre innovation robotique européenne et infrastructures cloud dominées par des acteurs américains. NEURA apporte une expertise pointue en robotique cognitive. Avec une approche intégrée où matériel et intelligence sont conçus conjointement. AWS, lui, offre donc l’échelle et la capacité opérationnelle. Pour les entreprises, cette alliance entre AWS et NEURA pourrait accélérer l’accès à des solutions robotiques plus fiables et plus rapidement déployables. Elle pose également les bases d’un nouveau modèle. Une IA physique connectée, évolutive et alimentée en continu par des données réelles. Ainsi, l’IA pourra s’incarner dans des machines qui interagissent avec le monde. Et avec ce type de partenariat, l’industrialisation de cette vision semble, enfin, à portée de main. Par ailleurs, NEURA construit pas à pas un écosystème international qui réunit acteurs de la robotique, industriels et spécialistes des semi-conducteurs. Parmi eux figurent notamment Kawasaki Heavy Industries, Bosch ou encore Qualcomm. Apparemment, NEURA veut créer une base technologique commune qui permettra aux robots d’apprendre plus vite et de s’adapter plus efficacement. Et aussi de générer de la valeur dans des secteurs variés, de l’industrie à la logistique, voire au domestique. À horizon 2030, NEURA évoque le déploiement potentiel de millions de robots cognitifs. IA 18 mai 2026 18 mai 2026 18 mai 2026 Votre adresse e-mail ne sera pas publiée. Les champs obligatoires sont indiqués avec * Commentaire * Nom * E-mail * Rejoignez nos 100 000 passionnés et experts et recevez en avant-première les dernières tendances de l’intelligence artificielle🔥 Accueil > Business & Transformation > AWS et NEURA Robotics unissent leurs forces pour industrialiser l’IA physique Rejoignez nos 100 000 passionnés et experts et recevez en avant-première les dernières tendances de l’intelligence artificielle🔥 Rejoins nos 100 000 passionnés et experts et reçois en avant-première les dernières tendances de l’intelligence artificielle🔥
Images (10): 



|
|||||
| How the Voice of Service Robots Can Convey Social Support | https://idw-online.de/de/news870795 | 10 | May 18, 2026 15:58 | active | |
How the Voice of Service Robots Can Convey Social SupportURL: https://idw-online.de/de/news870795 Content:
Nachrichten, Termine, Experten d Instanz: Teilen Teilen: 13.05.2026 09:36 It’s not just what is said, but how it is said: A study from the University of Augsburg examines how the voice of service robots influences customer perceptions after ser-vice failures When service robots make mistakes, it is not only important whether customers receive compensation. The robot’s voice can also shape how the situation is perceived. A human-like voice can make customers feel more supported after a service failure. This is the finding of a study by the Chair of Value Based Marketing at the University of Augsburg, published in the Journal of Business Research. The findings are relevant for companies that use service robots and similar AI-based systems. Service robots are increasingly used in service settings, such as hotels, restaurants, and airports. They can provide information, serve food, or perform other basic service tasks. In doing so, they can help address challenges related to labor shortages in many industries. However, robots also make mistakes: they may misunderstand customers, bring the wrong order, or fail to respond appropriately to a problem. This raises the question of how service robots should be designed and how they should respond in such situations. Voice as Social Support It is hardly surprising that financial compensation, such as discounts, can be helpful after service failures. However, the Augsburg study shows that the voice of a service robot can also play an important role. “When a service robot makes a mistake, customers are not only concerned with the factual correction of the error,” explains Maximilian Bruder, one of the authors of the study. “They also perceive the extent to which they feel supported and taken seriously in the situation.” The study focuses on the concept of social support. This concept has long been established in psychology, but has received considerably less attention in marketing research. The study shows that a human-like voice can increase perceived social support. Customers then experience the robot’s response as more helpful, caring, and supportive. This, in turn, has a positive effect on satisfaction with the service robot and on attitudes toward the company. This effect is particularly relevant when no financial compensation is offered. When customers receive a discount, this material form of recovery tends to dominate their evaluation of the situation. However, when no such compensation is provided, the way the robot communicates becomes more important. In such cases, a human-like voice can help customers perceive the interaction as more supportive. Not Every Human-Like Feature Has the Same Effect Another finding of the study is that not every form of human-likeness has the same effect. While a human-like voice produced positive effects, a more human-like appearance of the robot did not lead to comparable outcomes. “A voice not only conveys information, but also social cues,” explains Michael Paul, Chair of Value Based Marketing at the University of Augsburg. “It can influence whether a response is perceived as mechanical and distant or as supportive and caring.” For companies, this means that the design of service robots should not be reduced to their appearance or technical functionality. Especially in difficult service situations, voice can be an important design element. When financial compensation cannot or should not be offered, a human-like voice can help customers feel more supported and thereby improve their overall perception of the service interaction. Five Studies Show: Voice Makes a Difference The published article reports a total of five experimental studies. The studies examined service failures in a restaurant context in which a service robot brings the wrong order. The authors varied, among other things, whether financial compensation was offered and whether the robot spoke with a human-like or artificial-sounding voice. Additional studies examined whether comparable effects also emerge from a more human-like robot appearance. The results show that voice can convey social support, whereas a more human-like appearance did not produce comparable effects. https://www.uni-augsburg.de/en/fakultaet/wiwi/prof/bwl/paul/ https://www.sciencedirect.com/science/article/pii/S014829632600295X Merkmale dieser Pressemitteilung: Journalisten Psychologie, Wirtschaft überregional Forschungsergebnisse Englisch Suche in Pressemitteilungen Suche in Terminen Anfangsdatum Enddatum Sie können Suchbegriffe mit und, oder und / oder nicht verknüpfen, z. B. Philo nicht logie. Verknüpfungen können Sie mit Klammern voneinander trennen, z. B. (Philo nicht logie) oder (Psycho und logie). Zusammenhängende Worte werden als Wortgruppe gesucht, wenn Sie sie in Anführungsstriche setzen, z. B. „Bundesrepublik Deutschland“. Die Erweiterte Suche können Sie auch nutzen, ohne Suchbegriffe einzugeben. Sie orientiert sich dann an den Kriterien, die Sie ausgewählt haben (z. B. nach dem Land oder dem Sachgebiet). Haben Sie in einer Kategorie kein Kriterium ausgewählt, wird die gesamte Kategorie durchsucht (z.B. alle Sachgebiete oder alle Länder).
Images (10):
|
|||||
| Fanuc partners with Google to bring Gemini AI and Intrinsic … | https://thenextweb.com/news/fanuc-googl… | 10 | May 18, 2026 15:57 | active | |
Fanuc partners with Google to bring Gemini AI and Intrinsic platform to 1.1 million industrial robotsURL: https://thenextweb.com/news/fanuc-google-physical-ai-factory-robots Description: Fanuc shares hit a record high after partnering with Google to integrate Gemini Enterprise and the Intrinsic robotics platform into its industrial robot systems worldwide. Content:
TL;DRFanuc, the world’s largest industrial robot manufacturer with 1.1 million robots installed globally, is integrating Google Cloud’s Gemini Enterprise and Google’s Intrinsic robotics platform into its systems, replicating Google’s Android strategy for factory robots and sending Fanuc shares to a record high. Fanuc, the world’s largest industrial robot manufacturer with 1.1 million robots installed globally, is integrating Google Cloud’s Gemini Enterprise and Google’s Intrinsic robotics platform into its systems, replicating Google’s Android strategy for factory robots and sending Fanuc shares to a record high. Fanuc makes more industrial robots than anyone on the planet. Google makes more software platforms than anyone on the planet. On Wednesday, the two companies announced a partnership that merges those positions: Fanuc will integrate Google Cloud’s Gemini Enterprise and Google’s Intrinsic robotics platform into its industrial robot systems, giving the 1.1 million Fanuc robots already installed in factories worldwide the ability to understand human instructions, recognise objects, and coordinate autonomously. Fanuc shares surged 16 per cent to an intraday record of 8,880 yen. The market understood what this means before the press release finished loading. It means Google is doing to factory robots what Android did to phones. The 💜 of EU tech The latest rumblings from the EU tech scene, a story from our wise ol' founder Boris, and some questionable AI art. It's free, every week, in your inbox. Sign up now! In February 2026, Google folded Intrinsic, its robotics software subsidiary, out of the experimental Other Bets division and into the core business. The move was not administrative. It was strategic. Intrinsic had spent years building Flowstate, a web-based platform that lets manufacturers build robotic applications without writing thousands of lines of code. The platform handles motion planning, machine learning integration, and task orchestration across different manufacturers’ hardware. A factory could swap robot arms from Fanuc, Universal Robots, and KUKA while keeping the same Intrinsic-powered software running operations. The analogy is precise. Android does not build phones. It provides the operating system that runs across Samsung, Xiaomi, Motorola, and every other manufacturer’s hardware, giving Google access to billions of users without manufacturing a single handset. Intrinsic does not build robots. It provides the intelligence layer that runs across Fanuc, Universal Robots, and KUKA’s hardware, giving Google access to millions of industrial machines without bending a single piece of metal. The Fanuc partnership is the Samsung moment. Samsung was not the first Android partner, but it was the one with the manufacturing scale and market share to prove that Android could dominate. Fanuc commands roughly 16 to 18 per cent of global robot shipments, holds an estimated 50 to 60 per cent of the global CNC market, and has surpassed 1.1 million robots installed in factories from automotive plants to pharmaceutical packaging lines. When the world’s largest robot manufacturer adopts your software platform, the rest of the industry recalculates. The technical details matter. Fanuc will use Google Cloud’s Gemini Enterprise, the same generative AI platform that powers eight million paid enterprise seats across 2,800 companies, to build industrial robot systems that can process natural language instructions, identify and classify objects in unstructured environments, and autonomously control multiple robots working together. Fanuc will also achieve full compatibility with Intrinsic’s Flowstate development environment, meaning developers can program Fanuc robots through a visual, web-based interface rather than proprietary Fanuc code. Fanuc has already shipped more than 1,000 robots equipped with physical AI capabilities since demonstrating the technology at the International Robot Exhibition in Tokyo last December, and reported that demand was accelerating. The company plans to demonstrate an AI agent system for industrial robots later this month, in which collaborative and non-collaborative robots operate together using natural language instructions. The Google partnership provides the foundation model layer that Fanuc’s existing physical AI stack lacked. Accenture has invested in General Robotics, whose GRID platform deploys AI skills across more than 40 robots from different manufacturers including Fanuc, illustrating that the consultancies are already building businesses around multi-vendor physical AI orchestration. Google’s entry changes the economics. Intrinsic is not a startup seeking Series B funding. It is backed by a company with 4.6 trillion dollars in market capitalisation, 70 billion dollars in annual cloud revenue, and the most widely deployed generative AI models in enterprise computing. Fanuc was born from a division of Fujitsu in 1956 and spun off as an independent company in 1972. It is headquartered in Oshino, a village at the base of Mount Fuji in Yamanashi Prefecture, where the corporate campus is surrounded by forest and painted entirely in the company’s signature yellow. By 1982, Fanuc had captured half of the world CNC market, a position it has never relinquished. The company makes three things: CNC systems that control machine tools, industrial robots that operate in factories, and robomachines that combine both capabilities. It makes them better and in greater volume than any competitor. Fanuc posted record sales of 857 billion yen in fiscal 2025, roughly 5.7 billion dollars, with an operating margin of 21.4 per cent. Robot sales declined 16 per cent during the period due to weaker demand in China, Europe, and the Americas, particularly in automobile-related industries. But the physical AI announcement, and the Google partnership that followed, signal that Fanuc sees the next growth cycle coming not from selling more robot arms but from making the arms it has already sold significantly more capable. Nvidia’s GTC 2026 opened with 30,000 attendees and announcements that could reshape the next two years of AI infrastructure, and physical AI was a dominant theme. Fanuc was already a Nvidia partner, having announced in March 2026 that it would integrate Nvidia’s Isaac simulation frameworks and Omniverse libraries into its physical AI pipeline. The Google partnership adds the foundation model layer on top of Nvidia’s simulation and training infrastructure, giving Fanuc a two-platform AI stack that no competitor can match. The physical AI market is projected to grow from 1.5 billion dollars in 2026 to 15.2 billion dollars by 2032, a compound annual growth rate of 47 per cent. The adjacent industrial robotics intelligence software market is forecast to add 49 billion dollars by 2031 as factories shift from programmed motion to adaptive automation. McKinsey projects the broader market for general purpose robots could reach 370 billion dollars by 2040. The numbers are large and speculative. What is not speculative is that every major robotics company in the world is partnering with at least one foundation model provider, and the companies that partner with the strongest providers will capture the most value. Fanuc’s competitors are moving in the same direction. ABB has partnered with Nvidia for simulation-based physical AI. KUKA and Universal Robots are Intrinsic partners. Yaskawa, whose shares also rose on the Fanuc-Google news, has its own AI integrations. But none of them have Fanuc’s installed base. The 1.1 million robots in factories worldwide represent an upgrade opportunity that no amount of new robot sales can match. If even a fraction of those machines receive AI software upgrades through the Intrinsic platform, Google’s physical AI revenue could scale faster than any hardware competitor’s. Alphabet closed in on Nvidia as the world’s most valuable company after Q1 2026 earnings beat estimates across every division, with Google Cloud growing 63 per cent year on year to cross 20 billion dollars in quarterly revenue. The robotics partnership extends Google Cloud’s value proposition beyond chatbots and enterprise agents into the physical operations that account for the majority of global economic output. Manufacturing, logistics, agriculture, and construction are collectively worth tens of trillions of dollars. The companies that provide the intelligence layer for those industries will capture a proportional share. The partnership has a geopolitical dimension. Fanuc announced in March 2026 a 90 million dollar investment to build an 840,000 square foot robot manufacturing facility in Pontiac, Michigan, creating 225 jobs and expanding its US-based production capacity for physical AI-enabled robots. Since 2019, Fanuc America has invested nearly 300 million dollars in US facilities, expanded its footprint to three million square feet, and created more than 700 jobs. The company is opening the largest robotics and automation skills development centre in the United States at its Auburn Hills, Michigan campus later this year. Japan accounts for roughly 38 per cent of global industrial robot production by value and houses five of the ten largest robot manufacturers. SoftBank, NEC, Sony, and Honda have formed a 2.3 billion dollar physical AI consortium with backing from Japan’s national research agency. The country that dominated industrial robotics for four decades is now positioning itself to dominate the AI layer that will make those robots intelligent. Fanuc’s Google partnership is the commercial expression of that national strategy. Sundar Pichai opened Cloud Next 2026 with a 240 billion dollar backlog, 750 million Gemini users, and a plan to turn every Google product into an agent manager. The Fanuc deal shows that the agent strategy extends beyond screens. The same Gemini models that summarise emails and generate code are now being adapted to control robotic arms that weld car frames and assemble electronics. The intelligence is the same. The output modality is different. Instead of text, it produces physical motion. Nvidia’s Jensen Huang said at GTC 2026 that every industrial company will become a robotics company. Google is betting that every robotics company will become a Google customer. The Fanuc partnership is the most significant evidence yet that the bet is working. A 54-year-old Japanese manufacturer that has spent half a century building the most reliable industrial robots in the world just decided that Google’s software is the intelligence layer its machines need. Kia has confirmed plans to deploy Boston Dynamics Atlas robots in its Georgia factories starting in 2028, and every major automaker is evaluating similar programmes. The demand is real. The question was always which software platform would run the robots. Fanuc’s answer, delivered to a market that added 16 per cent to its share price in a single morning, is that the platform will be built by the same company that runs Android, Search, YouTube, and the fastest-growing cloud business in enterprise computing. The factory floor just became a Google product. Alina Maria Stan builds connections that people actually feel. As co-founder and COO of Tekpon, she turns product intuition into real moment (show all) Alina Maria Stan builds connections that people actually feel. As co-founder and COO of Tekpon, she turns product intuition into real moments of discovery, shaping how teams find and adopt SaaS every day. Since 2020, she has led Tekpon’s brand voice, media strategy, and growth plays with a clear focus on human outcomes behind every metric. Before Tekpon, Alina followed curiosity across industries and countries. She was CEO of King Casino Bonus and led affiliate and brand strategy at Extremoo Media and Fable Media in Denmark, where she learned how to build partnerships that last. Early on, she sharpened her CRM and pricing instincts at K.H. ApS, always asking why customers choose what they choose. Her approach is rooted in more than a decade of international experience and two master’s degrees, one in Sustainable Consumption from the Technical University of Munich and one in Consumer Affairs Management from Aarhus University. Get the most important tech news in your inbox each week. The heart of tech A Tekpon Company Copyright © 2006—2026, Cogneve, INC. Made with <3 in Amsterdam.
Images (10): 


|
|||||
| Florida Just Deployed 40 Robot Bunnies to Trick the Worst … | https://www.yahoo.com/news/articles/flo… | 6 | May 18, 2026 15:57 | active | |
Florida Just Deployed 40 Robot Bunnies to Trick the Worst Predator in the EvergladesURL: https://www.yahoo.com/news/articles/florida-just-deployed-40-robot-204617781.html Description: Researchers are now experimenting with animatronic, heat-generating rabbits that (they hope) can lure invasive pythons right to them Content:
Florida’s Burmese python problem isn’t going away anytime soon. The researchers, snake trackers, and other conservationists working to remove the giant snakes will be the first to tell you that eradicating this invasive species isn’t a realistic goal. That hasn’t kept them from trying to manage the problem, though, and scientists are now working on a new and futuristic approach to finding and removing pythons: robotic bunny rabbits. Researchers at the University of Florida are hoping these robo-bunnies can be another tool in the python toolbox, similar to the highly successful scout-snake method that has been honed by wildlife biologists at the Conservancy of Southwest Florida. Only instead of using male pythons (that have been surgically implanted with GPS) to lead them to the females, trackers would use the robots to bring the invasive snakes to them. These are stuffed toys that have been retro-fitted with electrical components so they can be remotely controlled. The robots also have tiny cameras that sense movement and notify researchers, who can then check the video feed to see if a python has been lured in. The University’s experiments with robotic rabbits are ongoing, according to the Palm Beach Post, and the research is being funded by the South Florida Water Management District — the same government agency that pays bounties to licensed snake removal experts and hosts the Florida Python Challenge every year. “Our partners have allowed us to trial these things that may sound a little crazy,” wildlife ecologist and UF project leader Robert McCleery told the Post. “Working in the Everglades for ten years, you get tired of documenting the problem. You want to address it.” McCleery said that in early July, his team launched a pilot study with 40 robotic rabbits spread out across a large area. These high-tech decoys will be monitored as the team continues to learn and build on the experiment. (As one example, McCleery explained that incorporating rabbit scents into the robots could be worth consideration in the future.) Read Next: These Snake Trackers Have Removed More than 20 Tons of Invasive Pythons from Florida… and They’re Just Getting Started The idea of using bunnies as decoys made sense for the team at UF, since rabbits, and specifically marsh rabbits, are some of the favorite prey items for Burmese pythons. Recent studies (including one authored by McCleery) have shown the massive declines in the Everglades’ marsh rabbit populations that can be directly attributed to pythons. “Years ago we were hearing all these claims about the decimation of mesomammals in the Everglades. Well, this researcher thought that sounded far-fetched, so he decided to study it,” says Ian Bartoszek, a wildlife biologist and python tracker based in Naples. “So, he got a bunch of marsh rabbits, put [GPS] collars on them, and then he let them go in the core Everglades area … Within six months, 77 percent of those rabbits were found inside the bellies of pythons. And he was a believer after that.”
Images (6): 


|
|||||
| Affordable humanoid robot kit brings advanced robotics in reach | https://interestingengineering.com/ai-r… | 10 | May 18, 2026 15:56 | active | |
Affordable humanoid robot kit brings advanced robotics in reachURL: https://interestingengineering.com/ai-robotics/bipedal-humanoid-robot-kit-asimov Description: Menlo Research launches a DIY humanoid kit for $15K, bringing open-source bipedal robots to independent builders. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Modular design links legs, arms, torso, head via universal mounts, enabling easy upgrades and faster robotics testing. The race to build humanoid robots is moving beyond secretive corporate labs and into the hands of independent developers. Singapore-based Menlo Research has unveiled a DIY version of its open-source humanoid robot, Asimov, aimed at hobbyists, researchers, and robotics enthusiasts. Priced at around $15,000—close to the project’s estimated bill-of-materials cost—the kit reflects a broader push to make bipedal robotics more accessible. Recently, a hobbyist created a life-size sci-fi droid replica using 3D printing and AI voice technology, showcasing affordable tools for interactive home robotics and automation. Menlo Research’s open-source humanoid robot kit has a strong focus on modular engineering and simulation-driven robotics development. The 3.93 feet (1.20 meter) tall humanoid weighs around 77 pounds (35 kilograms and features more than 25 degrees of freedom, offering builders a fully customizable research platform rather than a consumer-ready robot. Delivered completely unassembled, the system includes detailed manuals and instructional build videos aimed at developers and advanced hobbyists. A major technical highlight is the robot’s modular architecture. Independent leg, arm, torso, and head sections connect through universal motor mounting fixtures, allowing users to swap or upgrade components without redesigning the entire platform. The approach reduces maintenance complexity while enabling rapid experimentation with new actuators and control systems, reports Humanoids Daily (HD). The humanoid also incorporates a parallel Revolute-Spherical-Universal (RSU) ankle mechanism that provides two degrees of freedom for roll and pitch movement. The design improves torque distribution across the ankle joint and allows the robot to respond more naturally to uneven terrain and ground reaction forces during walking. To simplify locomotion control, Asimov uses passive articulated toes rather than powered toe actuators. These non-actuated joints assist with the transition from stance to push-off, improving traction and balance while reducing computational overhead and mechanical complexity. Most structural components are optimized for Multi Jet Fusion (MJF) 3D printing, enabling the production of strong, lightweight parts without relying on expensive CNC machining processes. This lowers manufacturing costs while making replacement and customization easier for developers, according to reports. Asimov’s software stack is built around a “Processor-in-the-Loop” (PIL) simulation approach that deliberately moves away from idealized robotics models. Instead of assuming clean, perfectly timed sensor data and deterministic physics, the training environment injects realistic operational imperfections to better mirror real-world conditions. This includes simulated CANBus communication delays of up to 9 milliseconds, producing stale or out-of-sync control signals, as well as artificially generated sensor noise through an I2C emulation layer. These disturbances are designed to replicate the unpredictability and latency inherent in physical robot systems. At the learning core, the system uses an Asymmetric Actor-Critic reinforcement learning framework. The “critic” network is granted access to privileged ground-truth simulation data, enabling accurate evaluation of state and reward signals. In contrast, the “actor” operates under constrained conditions, receiving only noisy, delayed sensor inputs similar to what onboard hardware would experience. By training under this mismatch, the policy learns to tolerate uncertainty and partial observability. The result is zero-shot sim-to-real transfer, allowing the robot to walk forwards, backwards, and recover from external pushes directly on hardware without additional tuning or calibration, reports HD. The kit isn’t inexpensive, with a target price of around $15,000. However, Asimov publishes a full bill of materials on its GitHub repository, allowing builders to source components independently and potentially reduce costs. According to Hackaday, while still a significant investment, it is considered far more accessible than earlier humanoid robotics systems that required millions in development funding. Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Images (10): |
|||||
| WIRobotics Raises $68M Series B To Expand Robotics Platform | https://ventureburn.com/wirorobotics-ra… | 10 | May 18, 2026 15:56 | active | |
WIRobotics Raises $68M Series B To Expand Robotics PlatformURL: https://ventureburn.com/wirorobotics-raises-68m-series-b-robotics/ Description: WIRobotics raises $68M Series B to scale wearable robots and humanoid ALLEX platform for global Physical AI expansion and deployment. Content:
By Clinton Key Takeaways WIRobotics raises $68M Series B led by JB Investment for robotics expansion. Funding supports wearable robot WIM and humanoid platform ALLEX development. Company accelerates global rollout and Physical AI partnerships. WIRobotics just raised $68 million in Series B funding, giving a major boost to its robotics development and global growth plans. JB Investment led the round, with backing from InterVest, Hana Ventures, Smilegate Investment, SBVA, NH Investment & Securities, Company K Partners, GU Investment, and FuturePlay. This comes right on the heels of their Series A from March 2024. The new funds are going to help the company grow its operations and ramp up product development, with a focus on wearable robotics and humanoid systems. Everything they build relies on real human movement data—that’s the heart of their entire strategy. WIRobotics only started in 2021, but they’ve already launched WIM, their wearable walking-assist robot. It’s picked up solid traction internationally. People are using WIM in Europe, China, Türkiye, and Japan. Now, WIRobotics is stretching both their hardware and software to keep up with this broader reach. This Series B gives them plenty of room to shift from just developing new ideas to actually rolling them out at scale. The big goal? To lock in their spot as a leader in both assistive robotics and Physical AI systems. WIRobotics has built its foundation through its wearable robotics system WIM. The device supports walking assistance using human movement data. It is designed to enhance mobility and improve physical capability. The system has now surpassed 3,000 cumulative units sold globally. The company has also expanded its subscription-based software services. Its WIM Premium platform adds a recurring revenue layer to its hardware business. This combination supports long-term commercial stability. It also strengthens real-world data collection for future robotics development. WIM has shown strong international growth across key markets. The system is now deployed in healthcare and mobility environments worldwide. Revenue has grown consistently over recent years. It rose from KRW 560 million in 2023 to KRW 2.79 billion in 2025. The company’s momentum reflects increasing demand for assistive robotics. WIM has also received CES Innovation Awards for three consecutive years. This highlights continued recognition of its technical capabilities and product design. WIRobotics is now scaling its commercial strategy further. It is expanding retail partnerships and experience centres in South Korea. It is also building a North American presence in California. These moves support wider global distribution and adoption. The company is now focusing heavily on humanoid robotics through its ALLEX platform. ALLEX is designed to replicate and extend human movement intelligence. It is built on years of wearable robotics data and real-world usage insights. At CES, ALLEX attracted interest from major global technology firms. Companies including NVIDIA, Meta, and Amazon engaged in discussions around potential collaboration. These interactions signal early commercial momentum for the platform. They also highlight growing industry interest in Physical AI systems. WIRobotics has been selected for NVIDIA’s Physical AI Fellowship. This programme supports advanced robotics and AI development. The selection strengthens the company’s position in the global robotics ecosystem. It also supports technical validation of its humanoid systems. The company is also working with AWS and NVIDIA on joint research initiatives. These collaborations focus on Physical AI and humanoid robotics validation. WIRobotics is conducting proof-of-concept projects with global institutions and automotive partners. These efforts support real-world deployment testing. The humanoid ALLEX platform is now entering a more advanced development stage. WIRobotics plans to launch a research-focused version later this year. It will be supplied to research institutions and industry partners. This will help accelerate data collection and applied robotics testing. WIRobotics is advancing global Physical AI commercialisation by combining wearable robotics and humanoid systems, creating a continuous human motion data loop that enhances adaptability, supports industrial deployment, and drives scalable robotics intelligence across global markets. Source: Created by Ventureburn. WIRobotics is positioning itself as a leader in Physical AI robotics. The company combines wearable systems with humanoid development. This creates a continuous data loop between human movement and machine learning systems. The approach is designed to improve long-term robotics intelligence. The company is also strengthening its international commercial strategy. It is expanding distribution networks across global markets. Partnerships with healthcare and industrial groups are supporting adoption. These efforts aim to increase both hardware deployment and software integration. A key focus is the evolution of ALLEX into a full Human Motion Robotics platform. The system aims to support natural human interaction. It is designed for both industrial and service applications. The long-term goal is scalable humanoid deployment. WIRobotics believes its real-world movement data provides a competitive advantage. This dataset supports improved robotic control systems. It also enhances adaptability across different environments. The company sees this as core to future humanoid robotics development. The company will continue building partnerships with global institutions. It is also working on mass production readiness for future humanoid systems. These steps are expected to support broader commercial deployment in the coming years. More News: Exponent Raises $40M To Build Financial Platform For Franchise Operators WIRobotics enters its next growth phase with strong investor backing. The Series B round reflects confidence in its dual-platform strategy. It also highlights growing global interest in humanoid robotics. The company is now positioned across both assistive and humanoid segments. The robotics sector continues to evolve toward Physical AI systems. Companies are increasingly focusing on real-world interaction capabilities. WIRobotics is building within this trend using movement-based datasets. This approach supports long-term scalability. The company plans to accelerate both research and commercial deployment. It will continue expanding WIM while advancing ALLEX development. It also aims to strengthen its global partnerships and supply chain. These efforts support its ambition to lead next-generation robotics innovation. To stay updated on crypto venture capital funding and market trends, visit our venture capital news section for more insights. Clinton Clinton Nwachukwu is a crypto and finance writer with an MBA in Artificial Intelligence and 6+ years of experience creating content for leading global brands. He turns complex topics into clear, actionable insights for readers worldwide. Disclaimer VentureBurn is a media platform covering the latest in cryptocurrency, artificial intelligence, venture capital, and the startup ecosystem. Opinions expressed on VentureBurn are for informational purposes only and do not constitute investment advice. Before making any high-risk investments in digital assets or emerging technologies, readers should conduct their own due diligence. All transactions and financial decisions are made at your own risk, and any losses incurred are solely your responsibility. VentureBurn does not endorse or recommend the buying or selling of any digital assets and is not a licensed investment advisor. Please note that VentureBurn may participate in affiliate marketing programs. Editor's Choice 10 Best Decentralized Crypto Exchanges (DEXs) in 2026 12 Crypto Exchanges with the Lowest Fees Comparison 13 Best Crypto Card Options in 2026: Debit & Credit Ranked Cowboy Space Corporation Raises $275M in Funding Round 10 Easiest Crypto to Mine: Best Profitable Coins In May 2026 Table of Contents Related articles Fractile Raises $220M To Advance AI Inference Chip Development Outmarket AI Raises $17M To Scale Insurance Workflow Automation Mind Robotics Raises $400M To Expand AI Industrial Robotics Platform Exaforce Raises $125M Series B To Scale AI Native Security Operations Platform Embat Raises €30M To Scale AI Treasury Management Platform Latest crypto news Join the Binance EDGE Trading Competition Now To Share in $100K Rewards. Contest Guide Join the Binance Wallet On-Chain Trade & Win Season 3 Win Up To 15 BNB or 88 SOL How Ethereum Casinos Are Driving Payment Innovation Exponent Raises $40M To Build Financial Platform For Franchise Operators Crew Carbon Raises $25M To Scale Wastewater Decarbonisation Technology GovWell Secures $25M Series A From Insight Partners Novella Raises $21M to Scale AI Insurance Brokerage Cash App’s Strategy Shifts And Its Help In Company Growth GridCARE Raises $64M to Launch AI Energy Category Synthetic Raises $10M Seed Funding For AI Bookkeeping Platform VentureBurn is a global news and insights platform covering the latest trends and developments across the technology landscape – including cryptocurrency, artificial intelligence, venture capital, and startups. Our mission is to empower entrepreneurs, investors, and tech enthusiasts with high-quality journalism, practical guides, and expert analysis to navigate and thrive in the rapidly evolving innovation economy. Category About Subcribe to our newletter Top tech news & guides in crypto, AI, VC, and startups — weekly in your inbox.
Images (10):
|
|||||
| Unitree unveils optionally manned transformer robot GD01 | https://interestingengineering.com/ai-r… | 10 | May 18, 2026 15:28 | active | |
Unitree unveils optionally manned transformer robot GD01Description: Unitree unveils a manned transformable mecha robot capable of switching between bipedal and quadruped modes. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. GD01 features stable bipedal walking, strong force to topple walls, and quick switch to quadruped mode for rough terrain movement. China’s robotics giant Unitree has unveiled the GD01, a mecha-style machine that can switch between two-legged and four-legged configurations. It resembles a real-life Autobot from the Transformers franchise and is built from high-strength alloy for civilian transport applications. According to the Hangzhou-based firm, it weighs 1102 pounds (500 kilograms) with a pilot on board and has a starting price of 3.9 million yuan (US$573,674). Recently, Unitree launched a low-cost upper-body humanoid robot starting at 26,900 yuan ($ 4290), featuring modular bases and up to 31 degrees of freedom. Unitree’s GD01 demonstration video shows the mecha carrying a pilot in a torso-mounted cockpit as it walks in a humanoid stance, strikes a stack of bricks, and then reconfigures its chassis into a four-legged configuration. The system is presented as a transformable civilian vehicle. The company states the vehicle weighs about 1102 pounds (500 kilograms) with a passenger on board. Founder Wang Xingxing is shown seated inside the cockpit during the demonstration, highlighting a sharp size contrast between operator and machine. In upright mode, the robot reaches roughly 1.6 times the height of an average adult, reports 36Kr. It demonstrates stable bipedal walking, high force output capable of toppling a brick wall, and a rigid structure that remains steady under impact. The system can fold its legs, adjust its center of gravity, and transition into a quadruped form within seconds, continuing movement without external assistance across uneven terrain. The one-minute video was shared on social media platforms, with the company releasing limited technical specifications. Unitree also issued a safety notice urging users not to attempt hazardous modifications or extreme tests, noting that humanoid robotics remains in an early experimental stage with functional limitations for personal users. The company shared no additional specifications publicly yet. The GD01 adds to the Unitree portfolio amid rapid growth in China’s humanoid robotics industry. In April, the company released an upper-body bipedal humanoid robot starting at 26,900 yuan, designed with modular deployment options including a fixed base and mobile chassis for use in research, light industry, and service applications. According to research firm Omdia, Chinese companies accounted for nearly 90 percent of global humanoid robot sales in 2025. Unitree reportedly shipped more than 5,500 humanoid robots in the previous year, while US companies such as Tesla, Figure AI, and Agility Robotics each shipped around 150 units during the same period, reports the South China Morning Post (SCMP). Chinese humanoid robots are also priced lower than many Western alternatives. Unitree’s entry-level humanoid R1 costs about US$6,000, while rival AgiBot offers a model priced around US$14,000. Tesla CEO Elon Musk has estimated that the future cost of the Optimus humanoid robot could fall between US$20,000 and US$30,000. Unitree sells its R1, G1 humanoids, and Go2 robot dog internationally via Alibaba’s AliExpress platform, targeting markets in North America, Europe, and Japan. Chinese humanoid robots have also begun appearing in airports and logistics operations, including trials by Japan Airlines using systems from Unitree and UBTech Robotics at Tokyo’s Haneda Airport, reports SCMP. In March, Unitree filed for an IPO on Shanghai’s STAR Market, planning to allocate about 85 percent of its 4.2 billion yuan ($61 million) fundraising target to research and development, including over 2 billion yuan ($29 million) for robotics model development. Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Images (10): |
|||||
| Unitree GD01 mecha unveiled as company files for $7 billion … | https://thenextweb.com/news/unitree-gd0… | 9 | May 18, 2026 15:27 | active | |
Unitree GD01 mecha unveiled as company files for $7 billion IPO after outselling Tesla on humanoid robotsURL: https://thenextweb.com/news/unitree-gd01-mecha-humanoid-robot-ipo Description: Unitree Robotics unveiled a $650,000 transformable mecha and is filing for a $7 billion IPO. The Chinese company shipped more humanoid robots than Tesla in 2025. Content:
TL;DRUnitree Robotics unveiled the GD01, a 2.8-metre transformable mecha priced from $650,000, but the real story is the company behind it: Unitree shipped more humanoid robots than Tesla in 2025, holds 70% of the quadruped market, grew revenue 335% to $235 million, has been profitable since 2020, and is filing for a $7 billion IPO on the Shanghai Stock Exchange. Unitree Robotics unveiled the GD01, a 2.8-metre transformable mecha priced from $650,000, but the real story is the company behind it: Unitree shipped more humanoid robots than Tesla in 2025, holds 70% of the quadruped market, grew revenue 335% to $235 million, has been profitable since 2020, and is filing for a $7 billion IPO on the Shanghai Stock Exchange. Unitree Robotics has unveiled a 2.8-metre transformable mecha that a human pilot climbs inside and operates from an open cockpit in the torso. The GD01 walks on two legs, folds into a quadruped configuration in seconds, weighs roughly 500 kilograms with a passenger, and is priced from 3.9 million yuan, approximately 650,000 dollars. It can also operate unmanned. Unitree calls it the world’s first production-ready manned mecha. It is a civilian vehicle, the company says, built for transport across rough terrain, exploration, and rescue operations where a tall vantage point helps. The GD01 is a spectacle. It is also a brand statement from a company that has earned the right to make one. TNW City Coworking space - Where your best work happens A workspace designed for growth, collaboration, and endless networking opportunities in the heart of tech. Unitree was founded in 2016 by Wang Xingxing, who built his first quadruped robot as a master’s thesis project at Shanghai University and left a job at DJI to start the company in a 50-square-metre office in Hangzhou. A decade later, Unitree holds roughly 70 per cent of the global quadruped robot market, having shipped more than 23,700 units in 2024 across its Go, A, and B series. In 2025, it shipped more than 5,500 humanoid robots, more units than any other manufacturer including Tesla. Revenue reached 1.71 billion yuan, approximately 235 million dollars, in 2025, representing 335 per cent year-on-year growth. The company has been profitable every year since 2020. Humanoid robots overtook quadrupeds as the primary revenue driver in 2025, contributing roughly 52 per cent of total revenue in the first three quarters. Unitree filed for an initial public offering on the Shanghai Stock Exchange in March 2026, seeking to raise 4.2 billion yuan, approximately 610 million dollars, at a target valuation of seven billion dollars. The investor list reads like a directory of Chinese technology capital: Alibaba, Tencent, China Mobile, Geely Capital, Ant Group, Jinqiu Capital (ByteDance’s investment arm), and HongShan Capital, formerly Sequoia China. Every major Chinese technology conglomerate has money in the company that dominates the market for robots that walk. Unitree’s commercial significance has nothing to do with the GD01. It rests on a product line that spans the market from consumer to industrial at prices that undercut every Western competitor by an order of magnitude. The Go2 consumer quadruped starts at 1,600 dollars. The G1 humanoid, a research and light industrial platform, sells for 13,500 to 27,000 dollars. The H2, a full-size industrial-grade humanoid, is priced at 29,900 dollars. The B2-W, a wheeled quadruped variant, handles inspection, patrol, and fire rescue. Unitree Robotics unveiled the GD01, source: Unitree For context, Figure AI’s Figure 02 industrial humanoid is being piloted at BMW at costs that have not been publicly disclosed but are estimated to be multiples of Unitree’s pricing. Boston Dynamics has begun commercial production of its electric Atlas, with every 2026 unit already committed to Hyundai. Tesla’s Optimus remains in research and development with no productive factory deployments as of the first quarter of 2026. Unitree is the only company simultaneously shipping consumer, research, and industrial humanoid robots at scale. China’s humanoid robot boom faces a commercialisation reality check, with more than 150 companies chasing a market where only 23 per cent of buyers report satisfaction with the robots they have purchased. Unitree’s answer to the satisfaction problem is iteration speed and price. If the first robot disappoints, the replacement costs less than a competitor’s pilot programme. The company treats humanoid robots the way Chinese smartphone manufacturers treated handsets a decade ago: ship fast, price aggressively, iterate on customer feedback, and let volume drive down cost. The GD01 transforms between bipedal and quadrupedal modes by folding its legs and shifting its centre of gravity, a process that takes a few seconds. In bipedal mode, it walks upright at nearly three metres tall. In quadruped mode, it lowers its profile for stability on rough terrain. The machine uses LiDAR, depth cameras, an inertial measurement unit, and pressure sensors for stability and navigation. It runs on Unitree’s self-developed high-torque motors. Demonstration videos show it walking through urban environments, smashing through brick walls, and carrying a pilot across uneven ground. Unitree has been explicit about safety. The company has asked users to refrain from dangerous modifications and noted that humanoid robotics remains in an early experimental stage with functional limitations. The 650,000 dollar price is described as a preliminary reference; the final production version may be adjusted depending on performance optimisation. The machine is not a toy. It is also, unmistakably, not yet a product with a clear commercial market beyond high-net-worth buyers and demonstration events. What it is, precisely, is a capability demonstration. The GD01 proves that Unitree can build large-scale bipedal systems with transformation mechanics, high-torque actuation, and manned operation. Those capabilities feed back into the company’s commercial product line. The motors, sensors, control algorithms, and structural engineering developed for a 500-kilogram mecha are directly applicable to the next generation of industrial humanoids that will carry loads, navigate construction sites, and operate in environments too dangerous for human workers. Tesla has explored using its Shanghai Gigafactory for Optimus humanoid robot mass production, a decision that would place the world’s most valuable car company’s robotics programme inside China’s manufacturing ecosystem. The irony is instructive. Tesla, the American company, would build its humanoid robot in China because Chinese manufacturing infrastructure, supply chains, and cost structures are the most efficient in the world for producing complex electromechanical systems at scale. Unitree already has that infrastructure. The components that go into a humanoid robot, precision motors, sensors, thermal management systems, lightweight structural materials, and battery cells, are the same components that Chinese factories produce at scale for smartphones, electric vehicles, and drones. Morgan Stanley forecasts China’s humanoid robot sales will reach 28,000 units in 2026, a 133 per cent year-on-year increase, with material costs falling 16 per cent as supply chain efficiencies from consumer electronics manufacturing carry over into robotics production. Chinese electric vehicles are flooding American social media despite 100 per cent tariffs, driven by consumer demand that trade barriers cannot fully suppress. The pattern for robotics is likely to follow the same trajectory. Unitree’s quadrupeds already sell globally. Its humanoids are priced at a fraction of Western alternatives. The GD01, whatever its practical utility, ensures that the Unitree brand is visible in every robotics conversation on the planet. Unitree’s Shanghai Stock Exchange filing is the first major humanoid robotics IPO. Boston Dynamics, owned by Hyundai, has been valued between 21 and 28 billion dollars by Korean securities firms, with bullish IPO projections reaching 100 billion dollars. Figure AI raised one billion dollars at a 39 billion dollar valuation in September 2025. But neither has gone public. Unitree, the company from the 50-square-metre Hangzhou office, would be the first pure-play robotics company to list. Cerebras, the AI chipmaker, is targeting a 40 billion dollar IPO valuation in what would be the first major AI hardware listing of 2026. Unitree’s seven billion dollar target is more modest, but the company has something Cerebras does not: profitability. Unitree has been profitable every year since 2020. In a market where AI and robotics companies routinely burn capital at extraordinary rates, a profitable robotics manufacturer filing for a public listing is an anomaly. UBTech, one of Unitree’s Chinese competitors, has offered 18 million dollars to hire a chief AI scientist, a figure that illustrates the talent arms race in Chinese robotics. Unitree’s advantage is not a single hire. It is a decade of iteration from Wang Xingxing’s thesis project to a product line that covers the market from 1,600-dollar consumer quadrupeds to 650,000-dollar pilotable mechs, all manufactured in China at costs that Western competitors cannot match. The GD01 will not sell in volume. A 650,000 dollar mecha does not have a mass market. What it has is attention. Every technology publication in the world covered the announcement. The videos went viral. The brand registered. And behind the spectacle, Unitree’s actual business, the one generating 335 per cent revenue growth and filing for a seven billion dollar IPO, continued shipping robots that walk, run, and work at prices that make every competitor recalculate their cost structure. Wang Xingxing built his first walking robot in a university lab in 2013. Thirteen years later, the company he founded from that project sells more humanoid robots than Tesla, holds 70 per cent of the quadruped market, counts every major Chinese technology company as an investor, and just unveiled a vehicle that transforms from a walking machine into a crawling one with a human inside. The GD01 is not the product. The product is the company that could build it. Alina Maria Stan builds connections that people actually feel. As co-founder and COO of Tekpon, she turns product intuition into real moment (show all) Alina Maria Stan builds connections that people actually feel. As co-founder and COO of Tekpon, she turns product intuition into real moments of discovery, shaping how teams find and adopt SaaS every day. Since 2020, she has led Tekpon’s brand voice, media strategy, and growth plays with a clear focus on human outcomes behind every metric. Before Tekpon, Alina followed curiosity across industries and countries. She was CEO of King Casino Bonus and led affiliate and brand strategy at Extremoo Media and Fable Media in Denmark, where she learned how to build partnerships that last. Early on, she sharpened her CRM and pricing instincts at K.H. ApS, always asking why customers choose what they choose. Her approach is rooted in more than a decade of international experience and two master’s degrees, one in Sustainable Consumption from the Technical University of Munich and one in Consumer Affairs Management from Aarhus University. Get the most important tech news in your inbox each week. The heart of tech A Tekpon Company Copyright © 2006—2026, Cogneve, INC. Made with <3 in Amsterdam.
Images (9): 


|
|||||
| Unitree unveils $4,290 humanoid robot with upper-body-only design | https://interestingengineering.com/ai-r… | 10 | May 18, 2026 15:27 | active | |
Unitree unveils $4,290 humanoid robot with upper-body-only designURL: https://interestingengineering.com/ai-robotics/china-unitree-humanoid-robot Description: Unitree launches a low-cost upper-body humanoid robot with modular design and precision control for research and industry. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Combines binocular vision, a 4-array mic, and voice interaction to enable real-time visual perception and speech-based control in one system. Chinese robotics firm Unitree has introduced a low-cost bipedal humanoid robot with an upper-body-only design. According to the Hangzhou-based firm, with prices starting at 26,900 yuan ($ 4290), it significantly lowers entry barriers in the sector. The robot replaces the traditional full-body structure with modular deployment options, including a fixed base or mobile chassis. It offers flexible configurations with 5 or 7 degrees of freedom per arm, for a total of up to 31 degrees of freedom. Last week, Unitree showcased its G1 humanoid gliding on skates, performing spins, turns, and flips using coordinated wheel-leg balance control. The bipedal robot replaces a full-body design with modular deployment options, offering either a fixed base or mobile chassis for varied applications. Each arm is available in 5-DOF or 7-DOF configurations, with total system DOF ranging from 15 to 31. The waist rotates ±150°, while the head supports ±115° yaw and ±36° pitch. Its gripper achieves ±0.1 mm repeatability and supports interchangeable dexterous hands, with each arm handling payloads up to 4.4 pounds (2 kilograms), reports EU.36KR. The base system integrates binocular vision, a 4-array microphone, and voice interaction, enabling combined visual perception and speech-based control. It is powered by dual 8-core high-performance CPUs, while the head vision module provides up to 10 TOPS of AI compute, supporting real-time perception tasks. The standard model includes 5-degree-of-freedom robotic arms, with an optional 7-DOF upgrade for enhanced manipulation. Mechanically, the platform is modular, offered in both fixed-base and wheeled configurations, allowing deployment across lab, industrial, and service environments. The system supports interchangeable components and exposes low-level interfaces for secondary development, enabling researchers to customize control, perception, and task execution. Weighing between 24 pounds (11 kilograms) and 70 pounds (32 kilograms), the robot supports both external and vehicle-mounted power supplies, balancing endurance with deployment flexibility. Its architecture is designed for rapid iteration, making it suitable for applications ranging from assembly and training to mobile service tasks such as guided interaction and warehouse assistance. Unitree is applying its proven playbook from quadruped robots to dual-arm humanoid systems. Experts point out that its earlier Go series succeeded by delivering capable legged robots at prices far below competing platforms, attracting a broad developer base and fostering an ecosystem around its SDK and control stack. A similar momentum could emerge in manipulation robotics if this approach translates effectively, reports Startup Fortune (SF). Last year, Unitree also unveiled the R1, a humanoid robot with 26 joints, at just 39,999 yuan (about US $5,900). However, the competitive landscape is more crowded. Companies like Boston Dynamics bring strong engineering depth, established enterprise ties, and brand trust, factors that matter in industrial deployments. Unitree’s lower-cost strategy may face limits in markets where reliability, support, and reputation outweigh price advantages. Experts say affordability is key for researchers and developers. Access to capable hardware lowers barriers, speeds iteration, and enables real-world testing beyond simulations, accelerating progress in embodied AI, especially in manipulation and applied robotics. The real signal will emerge from how developers use these systems. Open-source projects, academic work, and early-stage startups building on accessible platforms will shape the next phase of innovation more than high-end demonstrations, reports SF. Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Images (10): |
|||||
| Unitree Robotics G1 robot skates on ice and Rollerblades with … | https://www.foxnews.com/tech/unitree-g1… | 10 | May 18, 2026 15:27 | active | |
Unitree Robotics G1 robot skates on ice and Rollerblades with ease | Fox NewsURL: https://www.foxnews.com/tech/unitree-g1-humanoid-robot-ice-skates-rollerblades Description: Unitree Robotics' G1 humanoid robot glides on ice skates and Rollerblades, performing spins and flips while maintaining balance through wheel and leg control. Content:
This material may not be published, broadcast, rewritten, or redistributed. ©2026 FOX News Network, LLC. All rights reserved. Quotes displayed in real-time or delayed by at least 15 minutes. Market data provided by Factset. Powered and implemented by FactSet Digital Solutions. Legal Statement. Mutual Fund and ETF data provided by LSEG. Fox News Flash top headlines are here. Check out what's clicking on FoxNews.com. We've seen robots walk, run, climb stairs and even recently finish a half-marathon. What we haven't seen until now is a robot gliding across the ice like an Olympic skater or spinning on one leg on Rollerblades without losing balance. That is exactly what Unitree Robotics just showed with its G1 humanoid robot. In newly released footage, the robot moves on Rollerblades and ice skates while keeping its posture steady through coordinated wheel and leg control. It's pretty amazing to watch. Sign up for my FREE CyberGuy Report ELON MUSK TEASES A FUTURE RUN BY ROBOTS Unitree’s G1 humanoid robot glides on wheels, Rollerblades and ice skates, showing off sharp balance, spins and even a flip. (Unitree Robotics) When you actually watch the video, a few moments really stand out. It starts with the robot leaning into the motion, almost stepping as it propels itself forward on two wheels, shifting its weight from side to side as if one wheel is leading the next. Its arms move up and down to stay balanced, giving it a rhythm that feels closer to walking than rolling, like it's constantly adjusting in real time. Then it pulls off a series of spins and an impressive flip, landing clean on two wheels and continuing without missing a beat. No hesitation. Next, it switches to Rollerblades and moves with the same level of control. It glides, does some fancy footwork, changes direction and even lifts one leg while spinning and staying balanced like it's second nature. That alone would be impressive. But the real wow moment comes at the end. On ice, the robot starts doing smooth twirls, almost like it’s figure skating, while holding its posture without slipping. That’s when you start to see how far these humanoid robots have come. Most humanoid robots face the same problem. Staying upright while doing anything dynamic pushes the limits of control systems. The G1 changes that equation by blending two approaches. It combines wheeled efficiency with legged adaptability. That means it can roll when speed matters and step when terrain gets tricky. In the demo, the robot transitions smoothly between these modes. It executes continuous motion instead of stopping to rebalance. You see 360-degree turns, controlled spins and even front flips, all without a visible pause. That level of fluidity points to improvements in real-time control, balance correction and motion planning. These are areas that have held humanoid robots back for years, until now. ROBOTS LEARN 1,000 TASKS IN ONE DAY FROM A SINGLE DEMO The Unitree G1 performs spins, turns and a clean flip while riding on wheels and Rollerblades. The demo offers a striking look at how far humanoid robots have come. (Unitree Robotics) The hardware behind the G1 explains why it can pull this off. Unitree designed the system as a full-stack platform for AI training and deployment. That means the robot collects its own data, learns from simulation and applies those lessons in the real world. The robot comes in two main versions. The Standard model focuses on stationary tasks. The Flagship version adds a wheeled base that can reach about 3.3 feet per second. Both variations share a humanoid structure with up to 19 degrees of freedom. Each arm has seven degrees of freedom and can handle about 6.6 pounds. A flexible waist allows wide motion ranges, which helps with balance during dynamic movement. Vision comes from a binocular camera in the head, along with wrist cameras for close-up work. The system can use different grippers, including dexterous hands for more precise tasks. At the core, the Flagship model runs on an NVIDIA Jetson Orin NX module with up to 100 TOPS of compute. That level of onboard processing supports real-time decision-making during complex movement. Battery life can stretch up to six hours, depending on how hard the robot is working. For years, robotics has leaned in two directions. Wheeled machines move efficiently but struggle with obstacles. Legged robots handle complex environments but use more energy and move more slowly. Unitree's approach tries to merge both. By adding wheels to a humanoid frame, the G1 can move quickly across flat surfaces and still adapt when conditions change. That hybrid design also reduces wear on joints and improves energy efficiency over long distances. It also opens the door to new types of tasks. A robot like this could move through a warehouse, switch to precise manipulation at a workstation and then roll to the next job without slowing down. Take my quiz: How safe is your online security? Think your devices and data are truly protected? Take this quick quiz to see where your digital habits stand. From passwords to Wi-Fi settings, you’ll get a personalized breakdown of what you’re doing right and what needs improvement. Take my Quiz here: CyberGuy.com. NEW MOBILE ROBOT HELPS SENIORS WALK SAFELY AND PREVENT FALLS The Unitree R1 humanoid robot runs on a flat surface. The model is noted for its affordability at $5,900. (Unitree Robotics) The skating is what grabs you first. It is fun to watch and hard to ignore. What stands out after a few seconds is how steady the robot stays the whole time. It keeps moving, keeps adjusting and never looks close to losing control. That is a big change from the stop-and-go motion we are used to seeing. If this keeps improving, and I know it will, you are going to see robots that can move through real environments without slowing down or needing constant input. CLICK HERE TO DOWNLOAD THE FOX NEWS APP So here is the question. If robots can move this fluidly today, how long before they start working alongside you without missing a step and are you OK with that? Let us know by writing to us at CyberGuy.com. Sign up for my FREE CyberGuy Report Copyright 2026 CyberGuy.com. All rights reserved. Kurt "CyberGuy" Knutsson is an award-winning tech journalist who has a deep love of technology, gear and gadgets that make life better with his contributions for Fox News & FOX Business beginning mornings on "FOX & Friends." Got a tech question? Get Kurt’s free CyberGuy Newsletter, share your voice, a story idea or comment at CyberGuy.com. Get a daily look at what’s developing in science and technology throughout the world. Subscribed You've successfully subscribed to this newsletter! This material may not be published, broadcast, rewritten, or redistributed. ©2026 FOX News Network, LLC. All rights reserved. Quotes displayed in real-time or delayed by at least 15 minutes. Market data provided by Factset. Powered and implemented by FactSet Digital Solutions. Legal Statement. Mutual Fund and ETF data provided by LSEG.
Images (10): 




|
|||||
| Sergey Levine: General robotic foundation models may outperform narrow solutions, … | https://cryptobriefing.com/sergey-levin… | 10 | May 14, 2026 16:00 | active | |
Sergey Levine: General robotic foundation models may outperform narrow solutions, the future of medicine involves autonomous robots, and the importance of understanding physical interactions | Invest Like the BestDescription: General robotic models could revolutionize robotics by enhancing adaptability and efficiency across diverse applications. Content:
Searching... General robotic models could revolutionize robotics by enhancing adaptability and efficiency across diverse applications. Share Sergey Levine is an Associate Professor in the Department of Electrical Engineering and Computer Sciences at UC Berkeley and co-founder of Physical Intelligence. He earned his PhD in Computer Science from Stanford University in 2014 and joined UC Berkeley faculty in 2016. His research pioneered deep reinforcement learning algorithms for robotics, enabling end-to-end training of neural network policies that combine perception and control. General robotic models could revolutionize robotics by enhancing adaptability and efficiency across diverse applications. Share Sergey Levine is an Associate Professor in the Department of Electrical Engineering and Computer Sciences at UC Berkeley and co-founder of Physical Intelligence. He earned his PhD in Computer Science from Stanford University in 2014 and joined UC Berkeley faculty in 2016. His research pioneered deep reinforcement learning algorithms for robotics, enabling end-to-end training of neural network policies that combine perception and control. All content is for informational purposes only and does not constitute investment advice. CryptoBriefing does not provide recommendations to buy, sell, or hold any asset or contract. See our Disclaimer & Risk Disclosure. © Decentral Media and Crypto Briefing® 2026. Sign in to your account Create your account Already have an account? Sign In Forgot your password? Sign In Daily news, analysis & market insights delivered free.
Images (10): 
|
|||||
| Researchers Build Light-Powered AI Chips That Let Robots Learn Autonomously | https://www.techjuice.pk/researchers-bu… | 10 | May 14, 2026 16:00 | active | |
Researchers Build Light-Powered AI Chips That Let Robots Learn AutonomouslyDescription: Researchers develop light-powered photonic chips that enable faster and more energy efficient AI learning. Content:
Researchers at Xidian University in China have demonstrated a light-powered computing chip capable of running reinforcement learning tasks entirely within the optical domain, a breakthrough that eliminates a fundamental limitation that has held back light-based AI hardware for over a decade. The findings, published in the journal Optica, point toward a future where autonomous vehicles and robots learn directly from their environments using chips that are dramatically faster and more energy-efficient than today’s electronic processors. Photonic spiking neural systems have long been considered a promising path toward AI hardware that outpaces conventional electronics. These systems mimic how biological neurons communicate by using rapid pulses of light rather than electrical signals, which travel faster and consume far less energy. The problem has always been in the learning step. “Photonic spiking neural systems use brief optical pulses, or spikes, to emulate neural signaling, but they can typically only process the linear parts of computation using light,” said research team leader Shuiying Xiang from Xidian University. Every previous attempt to build such systems ran into the same wall: the nonlinear operations that actually make learning and decision-making possible required converting signals back into electrical form for processing. “Previously, the nonlinear steps that make learning and decision making possible required the signal to be converted back into electronic signals. This adds delay and undercuts the speed and energy advantages of photonics,” Xiang explained. The new design removes that conversion step entirely, keeping all computation, both linear and nonlinear, inside the optical domain. The researchers designed a programmable photonic neuromorphic platform built from two chips working in tandem. The first is a 16-channel photonic neuromorphic processor containing 272 trainable parameters, capable of handling multiple optical signals simultaneously. The second features a distributed feedback laser array with a saturable absorber component that enables low-threshold nonlinear optical spiking, which is the key element that allows learning to happen without electronics. To test the system’s practical capability, the team used reinforcement learning, the same AI training approach that underlies many modern robotic and autonomous systems, where a machine learns through repeated trial and error rather than labelled training data. “We used this system to demonstrate reinforcement learning, supported by a hardware and software collaborative framework that trains and runs the neural network. The system was able to learn quickly through trial and error, showing potential as a fast, low-latency solution that could be used for applications such as autonomous driving and embodied intelligence,” Xiang said. The results were tested against two standard control benchmarks. One required balancing a pole on a moving cart, the classic CartPole task used widely to evaluate reinforcement learning systems. The other required stabilising an inverted pendulum. Hardware decisions closely matched the software model in both tests, with accuracy dropping only 1.5% on CartPole and 2% on the pendulum challenge. On raw computing metrics, the photonic linear processing reached 1.39 tera operations per second per watt. Nonlinear computation achieved nearly 988 giga operations per second per watt. On-chip computing latency measured just 320 picoseconds, a speed advantage that conventional electronic processors cannot approach. The current prototype operates with 16 optical channels. The team has announced plans to scale the architecture to a 128-channel photonic spiking neural chip, which would support more complex reinforcement learning tasks closer to real-world deployment conditions. The researchers also aim to build compact hybrid photonic systems suitable for edge computing, where low power consumption and fast local processing are both critical requirements. If the architecture scales successfully, photonic AI hardware could offer a credible alternative to electronic GPU clusters for the class of applications, including robotics, autonomous vehicles, and real-time environmental adaptation, where latency and energy consumption are the binding constraints on what machines can do. You can read the research here. Abdul Wasay explores emerging trends across AI, cybersecurity, startups and social media platforms in a way anyone can easily follow. Google and SpaceX negotiate to launch orbital data centers revolutionizing AI computing infrastructure. Google’s Project Suncatcher aims for 2027 prototype satellites with TPUs. SpaceX pitches. Grok app downloads fell nearly 60% to 8.3 million in April from January peak of 20 million according to AppMagic data reported by Wall Street. OpenAI launched Daybreak cybersecurity initiative on May 11 using GPT-5.5 models and Codex Security to find vulnerabilities before exploitation. The platform competes with Anthropic’s Claude. The provincial government of Punjab has approved a government GPU cloud project, establishing the first local artificial intelligence platform for official and academic use. As. Premier Pakistan technology news website with special focus on startups, entrepreneurship and consumer products. © 2026 TechJuice.PK – All rights reserved.
Images (10): 




|
|||||
| Disney trains robots to fall, roll, and land safely without … | https://interestingengineering.com/ai-r… | 10 | May 14, 2026 16:00 | active | |
Disney trains robots to fall, roll, and land safely without damageURL: https://interestingengineering.com/ai-robotics/disney-builds-smart-robot-system Description: Disney researchers have developed a new system that lets robots turn uncontrolled falls into safe and controlled landings. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation all with fewer ads or a completely ad-free experience. All Rights Reserved, IE Media, Inc. The team used reinforcement learning with thousands of simulated tumbles to teach robots how to protect sensitive parts during a fall. A new research effort by Disney experts and university engineers shows how robots can now manage controlled landings when they fall. The project answers a key question in robotics about what happens when bipedal machines lose balance and hit the ground. The team studied why robots fall, what damage happens, where it occurs most, when the worst impacts take place, and who can prevent it. Their results show a system that lets a robot drop from a shove or slide and then choose a safe landing pose that protects vital parts. Robots that walk on two legs often move well on uneven surfaces or around obstacles. Yet gravity still wins and brings them down without warning. Traditional robots hit the ground with stiff joints or uncontrolled flailing that breaks sensors and cracks shells. Repair bills rise fast in labs and warehouses. Disney researchers decided to stop fighting gravity. Their goal was to let robots roll into a safe position instead of resisting the fall. The team set out to build a method that absorbs the impact and saves fragile parts such as heads and battery packs. They wanted a robot that could fall, shift its limbs during the drop, and land in a stable pose. The approach focused on the prevention of damage rather than strict balance control. The project used reinforcement learning to teach the robot safe tumbling skills. Thousands of virtual robots fell inside a simulator. Each digital fall generated data about what worked and what did not. The robot studied those results and learned a sequence of moves that reduced damage. The system awarded points when the robot reduced the impact force or protected sensitive areas. It removed points when motions became wild or off target. The researchers built a scoring system that tracked every twist of a joint from the moment the fall started. As the robot dropped, it tried to keep the landing smooth. When it neared the ground, it shifted into a final pose designed to shield important parts. The simulator included many types of falls. These ranged from sideways slips at 2 meters per second [about 6.5 feet per second] to fast forward tumbles with spinning hips. Velocities were randomized in every episode, so the robot never learned a single fixed path. To expand the library of outcomes, the team created 24,000 stable poses and dropped the robot models from waist height. The simulator relied on physics to determine which ones worked. Ten of the final poses came from artists who built creative positions such as crouches or wide, dramatic flops. These poses had to stay within the limits of real joints and motors. The team also added random noise to the simulations so the robot could handle small, unpredictable nudges. Training ran for two days on strong graphics cards. 4,000 virtual robots fell at the same time. A small neural network processed joint angles, body orientation, and motion data. It sent commands fifty times per second. The method used proximal policy optimisation to adjust the robot’s behavior step by step without sudden leaps. The simulator reduced contact pressure and set different sensitivity levels for each body part. The legs stayed soft while the head needed more protection. After the training, the robot could shift from a loose sprawl to a tight protective curl in an instant. The policy was then placed in a real metal robot. It weighed sixteen kilograms [about 35 pounds] and stood on two spring legs with mechanical arms. A motion capture system tracked its motion and fed updates back to the controller. The tested system showed that robots do not need to fear sudden collapse. Instead of turning into piles of broken parts, they can fall with control. The research was published in the journal arXiv. A versatile writer, Sujita has worked with Mashable Middle East and News Daily 24. When she isn't writing, you can find her glued to the latest web series and movies. Premium Follow
Images (10): |
|||||
| Disney Research Demonstrates “ReActor,” a New System That Could Help … | https://wdwnt.com/2026/05/disney-resear… | 10 | May 14, 2026 16:00 | active | |
Disney Research Demonstrates “ReActor,” a New System That Could Help Robots Move More Like Humans - WDW News TodayDescription: The motion-learning technology demonstrated in this project could mark a significant improvement for robotic movement across any application. Content:
Austin Haughton Published: May 10, 2026 Last Updated On: May 11, 2026 Disney Research has shared a new video demonstrating “ReActor,” a research project focused on transferring human motion to robots with very different body shapes and movement capabilities. The motion-learning technology demonstrated in this project could mark a significant improvement for robotic movement across any application. A portion of the abstract for the full research paper reads as follows: Retargeting human kinematic reference motion onto a robot’s morphology remains a formidable challenge. Existing methods often produce physical inconsistencies, such as foot sliding, self-collisions, or dynamically infeasible motions, which hinder downstream imitation learning. We propose a bilevel optimization framework that jointly adapts reference motions to a robot’s morphology while training a tracking policy using reinforcement learning … We validate our method in simulation and on hardware, demonstrating challenging motions for morphologies that differ significantly from a human, including retargeting onto a quadruped. In simpler terms: the existing methods used to teach robots humanlike movement tend to fall short when aiming for smooth, 1:1 human motion. A proposed system from Disney Research offers a new layered learning method, where the program takes the original source motion and analyzes how to best match the movement if the source body more closely matched the target robot’s design. The project, formally titled “ReActor: Reinforcement Learning for Physics-Aware Motion Retargeting,” was developed by researchers David Müller, Agon Serifi, Sammy Christen, Ruben Grandia, Espen Knoop, and Moritz Bächer, a team from Disney Research in Switzerland. The video from the team offers a visual demo of human motion being adapted to multiple robotic forms, including two humanoid robots and a quadruped robot, using multiple targeting methods compared against Disney’s ReActor method. The overall goal is to preserve the nuanced qualities of a human performance while making the resulting motion physically plausible for machines with different sizes, proportions, degrees of freedom, and joint limitations. Existing methods that work toward this goal have historically encountered issues overcoming technical errors in translating motion from human sources to robots or simulated models. These can include foot sliding, self-collisions, ground penetration, floating feet, or movements that are not physically achievable for the target robot. Disney’s ReActor addresses those issues by combining reinforcement learning with physics simulation, allowing the system to adapt the motion while also training a control policy to track it. The system uses what the researchers describe as a “bilevel optimization” framework. The method adjusts the reference motion at one level while simultaneously training the robot to follow that motion at another level. Rather than requiring extensive manual tuning, the system requires fewer body-part links between the source and target, such as matching relevant human body segments to comparable parts of the robot. As demonstrated in the video and according to the full paper, the method performed better than baseline approaches in several areas, including its success in avoiding all of the technical errors described earlier. The researchers also note that the system was validated both in simulation and on physical hardware, as shown with the live robot demo toward the end of the video. Check out the full demonstration from Disney Research on YouTube: While the project itself is dense and highly technical, the broader implications are easy to understand for Disney fans: the work could eventually support more lifelike robotic characters, interactive entertainment figures, or performance-driven animatronics, which have traditionally required more arduous fine-tuning for believable humanlike movement. The work on ReActor is still brand new, so there are no official comments from the company regarding its potential use in the future. Regardless, the project continues the company’s long-running interest in robotics, animation, and character performance technology. You can check out the full paper from Disney Research posted on arxiv.org. Do you have any experience in the fields of robotics or animation? What are your thoughts on this work coming out of Disney Research? Join the discussion with us on social media. For the latest Disney Parks news and info, follow WDW News Today on Twitter, Facebook, and Instagram. Previous Next © 2026 WDW News today
Images (10): 
|
|||||
| Efficient robot navigation inspired by honeybee learning flights | Nature | https://www.nature.com/articles/s41586-… | 10 | May 14, 2026 08:00 | active | |
Efficient robot navigation inspired by honeybee learning flights | NatureDescription: Navigation is a crucial capability for both animals and robots. Although tiny flying insects can robustly navigate over long distances1, state-of-the-art robot navigation methods are computationally expensive and therefore restricted to large robots2,3. Here we propose ‘Bee-Nav’, a highly efficient navigation strategy inspired by the visual learning flights of honeybees4–6. In equivalent robotic learning flights, a tiny neural network is trained to map omnidirectional images to a home vector based on path integration. After learning, the robot can fly far away from home, come straight back using path integration and cancel integration drift using the visual homing network. Simulations showed that, for realistic path integration accuracies, the neural network requires training on only approximately 0.25–10.00% of the total flight area. In real-world indoor and outdoor experiments, a small drone successfully returned to within 0.5 m of home for 100% of 30–110-m flights and 70% of 200–600-m flights in windy conditions, using 3.4-kB and 42-kB neural networks, respectively. The proposed navigation strategy will be vital for resource-constrained robots that perform tasks while travelling from and to a home location. Furthermore, it provides new perspectives on the neuroethology of insect navigation, from how visual learning shapes homing trajectories to the nature of cognitive maps. A highly efficient navigation strategy taking inspiration from the visual learning flights of honeybees is described, which enables drones to quickly return from longer flights by means of path integration and uses a neural network as a view memory to reach the home location. Content:
Thank you for visiting nature.com. You are using a browser version with limited support for CSS. To obtain the best experience, we recommend you use a more up to date browser (or turn off compatibility mode in Internet Explorer). In the meantime, to ensure continued support, we are displaying the site without styles and JavaScript. Advertisement Nature (2026) Cite this article Navigation is a crucial capability for both animals and robots. Although tiny flying insects can robustly navigate over long distances1, state-of-the-art robot navigation methods are computationally expensive and therefore restricted to large robots2,3. Here we propose ‘Bee-Nav’, a highly efficient navigation strategy inspired by the visual learning flights of honeybees4,5,6. In equivalent robotic learning flights, a tiny neural network is trained to map omnidirectional images to a home vector based on path integration. After learning, the robot can fly far away from home, come straight back using path integration and cancel integration drift using the visual homing network. Simulations showed that, for realistic path integration accuracies, the neural network requires training on only approximately 0.25–10.00% of the total flight area. In real-world indoor and outdoor experiments, a small drone successfully returned to within 0.5 m of home for 100% of 30–110-m flights and 70% of 200–600-m flights in windy conditions, using 3.4-kB and 42-kB neural networks, respectively. The proposed navigation strategy will be vital for resource-constrained robots that perform tasks while travelling from and to a home location. Furthermore, it provides new perspectives on the neuroethology of insect navigation, from how visual learning shapes homing trajectories to the nature of cognitive maps. Small robots are at present deprived of the autonomous navigation capabilities necessary for real-world applications. Resource-restricted robots, such as lightweight flying drones7,8, can simply not carry or power the required computational systems for high-precision, map-based autonomous navigation2,3. Despite efforts towards improved computational efficiency, navigation based on detailed metric maps still requires a high-end laptop9 or a GPU-enabled embedded computer10. Efficiency can be improved by sacrificing map accuracy, storing it as a topological graph with nodes as places and edges as paths11,12. However, the robot still needs to recognize where it is and adjust the map accordingly, leading to increased computational requirements for larger trajectories11,13. This limits the navigation range of the most efficient map-based robot navigation methods. The state of the art is a tiny flying robot that uses 500 kB of memory on a low-power AI chip for navigating in a 4 × 5-m area14. Nature shows that extremely resource-efficient, long-range navigation is possible. Small insects such as honeybees robustly navigate up to several kilometres from their hive1. Their impressive navigation capabilities rely on two components15. The first is path integration16, which allows insects to estimate their position with respect to a starting point by integrating the directions and distances travelled. Because path integration is subject to increasing drift, insects also rely on a second component called view memory, which is the act of recalling visual landmarks and their relation to places of interest17. Path integration is well understood by now, even to the neuronal level18. By contrast, the precise working of view memory and its interplay with path integration is less clear. Lured by the navigational feats of insects, roboticists have proposed various insect-inspired navigation strategies. The predominant strategy is route-following, which typically relies on view memory to retrace the outbound trajectory during the return journey19,20,21,22,23,24. Route-following is a suitable strategy for navigating in highly cluttered environments, but in open areas, it can make the return journey unnecessarily long. Indeed, insects such as honeybees and desert ants tend to return home with a new straight path, even after long tortuous outbound journeys25,26 (Fig. 1a). During the return journey, insects rely initially on path integration and then increasingly on view memory when nearing their home26,27,28. a, Before foraging, honeybees first perform ‘learning’ flights (dark-grey line) close to home (star). Subsequently, they can fly out far away from home (teal line) and come back in an almost straight line (orange and red lines). Scale bar, 100 m. b, In Bee-Nav, the robot also first performs a learning flight, capturing omnidirectional images while using path integration for maintaining a vector (orange arrows) pointing to the home location. A neural network is trained to map the images to the home vectors. The trained network encodes an implicit view memory within the learned homing area (LHA) enclosing the learning flight trajectory (dashed circle). c, After learning, the robot can execute a long outbound flight to perform a task of interest (teal line), while maintaining a home vector based on path integration. It can then perform a straight inbound flight (orange line) using path integration until it supposedly arrives home. If the robot is inside the LHA, it can cancel the accumulated path integration drift by performing visual homing with its neural network (red line). It does this by making subsequent ‘steps’ along the homing vectors of the network. d, The robot in this study performs path integration based on velocity from optical flow and laser-based height measurements and a heading based on gyro integration. e, The view memory of the robot consists of a small feedforward convolutional neural network that maps an unwrapped omnidirectional image to a home vector. The centre of the view corresponds to the heading of the robot (solid black line) and the home direction is predicted by the neural network (vertical red line). Because the learning targets are imperfect path-integration-based home vectors, the neural network estimates are typically close but not identical to the home direction (vertical dashed black line). The idea of combining path integration and view memory in this manner formed the basis for the seminal work on ‘Sahabot 2’, a mobile ground robot that navigated in the desert28. However, separate experiments were performed for path integration and visual homing28, and subsequent studies did not explore their combined use. For path integration, it has been shown that accuracy benefits from combining several sensory cues with a motion model, including proprioception, optical flow, airflow sensors and polarization sensors29,30. The accuracy reached with bioinspired mechanisms can be impressive: for example, 1.5 m drift per 100 m for a flying robot31. In terms of view memory, there has also been substantial progress32, in which vision algorithms moved from landmark recognition28,33, through the matching of snapshots19,22,34, to neural networks for interpreting natural scenes35,36,37,38. Neural networks hold the potential to compress the view memory for a large visual homing area in a small parameter space. In a recent robotics study, a small 9-kB neural network enabled visual homing for distances up to 18 m in an outdoor environment39. The neural network transformed images directly to right or left steering commands. Learning was performed online with a biologically plausible neural network structure and learning mechanism, inspired by the insect mushroom body32. The learning targets consisted of the angles from the robot to the home as obtained with the Global Positioning System (GPS)39. For independence of external infrastructure, the targets could be obtained from path integration. Despite these advances, a critical gap remains: how to integrate the complementary mechanisms of path integration and view memory into a unified strategy for efficient, long-range navigation. To address this gap, we introduce a robot navigation strategy inspired by honeybee learning flights. Honeybees perform one to several such short flights before they depart on longer exploration or foraging trips4,5,6 (Fig. 1a). After learning flights, honeybees can immediately forage far away, while flying back in an almost straight line. On the basis of our preliminary simulation study40, we have developed a navigation strategy, named Bee-Nav, which is both highly efficient and suitable for long-range robot navigation. In the strategy, a robot first performs a learning flight (Fig. 1b), during which it trains a small on-board neural network to map its visual inputs directly to a home vector. This vector represents the direction and distance home from the point of view of the robot (Fig. 1d,e). The learning is self-supervised, as the target vector is determined with path integration. Self-supervised learning is a form of associative learning that is quick and requires only a few sample images and target vectors. However, because path integration drifts over time, the target vectors increasingly deviate from the true home vectors. We study the effects of this deviation on the resulting visual homing behaviour. The trained neural network represents a view memory, allowing the robot to visually estimate the home location within an area circumscribing the learning flight trajectories. We refer to this area as the learned homing area (LHA) and approximate it with a home-centred circle. After learning, the robot can fly far away from home and come back along a straight trajectory based on path integration (Fig. 1c, orange line). As long as the robot ends up in the LHA, it can cancel any accrued path integration drift with its onboard visual homing neural network (Fig. 1c, red line). The efficiency of Bee-Nav depends on the LHA being small compared with the total flight area. In simulation, we investigated how large the LHA needs to be for different amounts of path integration noise. The simulated robot used path integration while flying 1,000 different outbound trajectories, following a block-wave pattern that could be useful for a search mission (Fig. 2a). Each outbound flight was followed by a straight inbound trajectory back home based on noisy path integration, leading to an end point offset from the home location. We used a Gaussian noise model, which assumed the heading to drift over time. Specifically, noise was added to the heading estimate after each time step in the simulation from the normal distribution \({\mathcal{N}}(0,t{\sigma }_{\psi }^{2})\), with t in seconds. The distance estimation noise was modelled as \({\mathcal{N}}(0,d{\sigma }_{d}^{2})\), with d the distance covered during the time step in metres. We fit the parameters of the noise model to the real robot’s straightforward path integration method (Supplementary Information Section 11): a tiny downward-looking optical flow sensor and laser for estimating velocity and gyro measurements for updating the heading estimate. a, Results of 1,000 simulated foraging flights, in which a robot used path integration while first flying a search pattern outbound trajectory and then a straight inbound trajectory home (star). Teal and orange dots represent end points of the outbound and inbound flights, respectively. The dashed teal circle contains 99% of the outbound flight end points, whereas the dashed grey circle contains 99% of the inbound end points. For the expected robot path integration noise, the area of the inner circle is 3.84% of the area of the outer circle. b, Effect of path integration noise level on the relative area of the LHA with respect to the total flight area for methods with and without a compass. c, Image of the artificially generated landscape used in the simulation learning flight and homing experiments. d, Visual homing results in ten different simulated forest environments. The radius factor represents the distance of initial positions from the home location, with factor one corresponding to the edge of the LHA (10 m, dashed vertical line). Light-blue lines show the success percentages of the proposed Bee-Nav strategy per environment, averaged over 16 runs per circle radius, with the dark-blue line indicating the median over all environments. The shading indicates the 25th to 75th percentile. The results in red are for a snapshot-based homing method34 and those in green for the perfect memory method51,52. e, Example trajectories starting from a 20-m circle radius. Green and red lines show successful and failed homing trajectories, respectively, light-green circles are tree locations and the small arrows are the predicted home direction. f, Histograms of the distance and absolute angular errors for the home vector estimation for the test set images of the LHA of one environment. Figure 2b shows the percentage of the LHA with respect to the total flight area for various amounts of path integration noise. Even with the substantial path integration drift of the robot, the LHA only needs to be 3.84% of the total flight area to capture 99% of the journey end points (Fig. 2b, σψ = 0.63, σd = 0.10). The lines represent different scaled versions of the robot’s noise (both standard deviations multiplied by a factor ranging from 0.1 to 1.5). Moreover, the LHA was 0.74% when odometry noise was similar to that of a more advanced, computationally more expensive method for visual odometry, SVO+GTSAM41. Finally, the noise model was fit to a bioinspired odometry method with a magnetometer heading measurement31 for more precise path integration42, resulting in an LHA percentage of only 0.24%. Insects also exploit absolute heading measurements to reduce integration drift, for example, through the polarization of sky light. A coarse approximation of the path integration accuracy of desert ants27 and honeybees43 led to LHA percentages of 7.6% and 3.4%, respectively (Supplementary Information Section 11). A small LHA implies that the neural network can also be small, enabling inference on limited, energy-efficient computing hardware. To quantify the visual homing performance, we performed further experiments in the visually realistic NVIDIA Isaac simulator with a small 42.3-kB attention neural network (Fig. 2c). The learning flight trajectory (Supplementary Information Section 6) fits in a 10-m-radius circle around the home location. The simulated robot performed visual homing, following the vectors output by the network, starting at various distances from the home location. Figure 2d shows the results of 800 simulated visual homing runs in ten different randomly generated forests. The success rate of the proposed strategy was 100% within the LHA radius and, depending on the environment, generalized even up to 2.5 times the LHA radius. This generalization beyond the LHA is supported by our theoretical analysis (Supplementary Information Sections 1–5). Figure 2e shows 16 visual homing runs of Bee-Nav, starting at two times the LHA radius. The visual homing runs that failed typically got stuck in local minima outside the LHA, close to trees that obstructed the view. Within the LHA, the angular errors of the network were smaller than about 40° and the distance errors were smaller than 2 m (Fig. 2f). Visual homing will generally be successful if angular errors stay below 90°. We compared the visual homing of Bee-Nav with two alternative approaches (Fig. 2d). First, we compared it with a snapshot-based approach34 that relies on comparing views around the current position with a single snapshot taken at the home location (red lines). It started to deteriorate as soon as the view became too different from the home snapshot. Second, we devised a ‘perfect memory’ approach that stored all of the images and target vectors gathered during the learning flight as snapshots. During navigation, the simulated robot compared the current image with all stored snapshots. It selected the k = 3 best-matching snapshots and followed the average of their target vectors. The visual homing of Bee-Nav is substantially more efficient and more accurate than the alternative approaches. We expect that the better performance outside the LHA compared with perfect memory is because of the ability of the neural network to attend to relevant landmark objects, even if they are further away and hence smaller in image size. Finally, a comparison was made with a biologically plausible mushroom-body-inspired approach39. Although showing great promise, it does not yet achieve similar performance to Bee-Nav (Supplementary Information Section 12). We successfully implemented Bee-Nav on a small flying drone, performing real-world experiments in different environments (Figs. 3 and 4). The drone was fitted with an omnidirectional camera and a Raspberry Pi 4 for executing the small neural networks for visual homing. In our experiments, we used two types of network: a ‘compact’ 3.4-kB five-layer neural network and a slightly larger, 42.3-kB eight-layer ‘attention’ neural network (Methods). Because our main interest was to verify the performance of the proposed strategy in various environments, we predominantly trained the neural networks after the learning flight on an Apple MacBook Air ground station laptop (offline, offboard training). For most real-world applications, offboard learning will be acceptable. However, onboard learning would improve the robot’s degree of autonomy. Hence, we also tested onboard, offline learning and onboard, online learning (that is, after and during the learning flight, respectively). a, Time-lapse image of one experimental set-up showing four visual homing flights in a scene containing obstacles, such as screens and poles, inside the LHA. Each flight begins at a different position at the edge of the arena with a varying heading, moving towards home (located at the centre, indicated by the red cross on the ground) using the output from the homing network at each step (Supplementary Video 5). b, In a different environment set-up, a top-view plot showing eight visual homing trajectories reaching 0.5-m areas around home (dashed grey lines) starting from different starting locations (grey pentagons). The trajectories are guided by models trained in each of the six learning set-ups: attention network and compact network trained offboard, offline (cyan and blue); attention network and compact network trained onboard, offline (purple and red); and attention and compact network trained onboard, online (green and yellow). c, Comparison of distributions of absolute angle prediction and distance prediction errors at each step over all considered homing trajectories (nhoming-flights = 8 per learning set-up). a, Time lapses of all four phases of the proposed navigation strategy performed by the robot flying in a 30 × 40-m indoor hall at Unmanned Valley, Valkenburg (UVV), that is, the large indoor area. b, GPS trajectory of an outdoor robotic navigation experiment at the 400 × 500-m UVV testing grounds (the large outdoor area), indicating the different phases of the flight. Scale bar, 50 m. c, Homing success percentages in the experimental environments (Extended Data Fig. 6). Satellite basemap imagery provided by Esri World Imagery; sources: Esri, i-cubed, USDA, USGS, AEX, GeoEye, Getmapping, Aerogrid, IGN, IGP, UPR-EGP and the GIS User Community. Available at https://services.arcgisonline.com/ArcGIS/rest/services/World_Imagery/MapServer. First, we tested the neural-network-based visual homing in a 10 × 10-m indoor flight arena (Fig. 3a). Despite real-world path integration noise on the learning targets, the drone successfully ended up within 0.5 m of the home location in 100% of the 48 homing flights (Fig. 3b and Supplementary Video 1). Direction errors were predominantly below 40° and distance estimation errors below 1.5 m (Fig. 3c). All manners of learning led to successful homing (Fig. 3b). Notably, onboard, online learning performed slightly better than onboard, offline learning. This is probably because of the different angle resolution when performing data augmentation (Extended Data Table 1). Still, offline, offboard learning, which uses more learning iterations and data augmentation, gave the most accurate predictions and the shortest homing paths. Hence, we used this way of learning for the remainder of the experiments. Subsequently, we applied the full navigation scheme to larger environments, using the compact neural network. Time lapses of one of those experiments in a 30 × 40-m indoor hall, with all of the phases of Bee-Nav, show successful homing even under large drift (Fig. 4a and Supplementary Video 2). We made the robot meander during the outbound flight to cover a large distance during this flight phase. The uniformly textured floor posed challenges to visual odometry, occasionally resulting in a substantial displacement after the path-integration-based phase of the inbound flight. The subsequent visual homing effectively cancelled path integration drift. Moreover, we performed long-range flights at a large, wide-open outdoor test terrain with a permissible flight area of 400 × 500 m (Fig. 4b). This resulted in new challenges. For example, the presence of strong wind led to large compensatory attitude angles, requiring algorithmic adaptations to compensate for the resulting camera tilt (Methods). Other challenges included quickly changing lighting conditions and the absence of close-by landmarks. Hence, at this location, we added several objects to the ground to serve as landmarks (Extended Data Fig. 6f). Because the compact network did not reach sufficient prediction accuracy in this environment, we used the attention network for homing (Supplementary Information Section 13). The robotic experiments confirm the effectivity and efficiency of Bee-Nav. For most environments, with outbound flight distance in the range 30–110 m, the homing success was 100% (Fig. 4c). Only for the largest outdoor environment, with flight distances in the range 200–330 m, homing success reduced to 80% during days with low wind conditions and 50% in high winds (mean wind speeds Uwind > 5 m s−1, with wind gusts > 10 m s−1; Supplementary Video 3). The reduced success percentage was mainly because of factors such as sun glare and the wind causing the camera to tilt, thus worsening the visual homing accuracy when further away from the learning flight trajectory. Still, in that environment, learning a 10-m-radius area with the 42.3-kB attention neural network sufficed to fly up to 600 m away and come back along an almost straight 150-m path (Supplementary Video 4 and Extended Data Fig. 8f). We expect our work to have implications for both robotics and biology. For robotics, it brings long-range navigation in reach of small, resource-constrained robots. At present, robotic navigation mainly relies on creating detailed 3D maps of the environment. These maps have as advantages in that they (1) allow for optimal trajectory planning to any place in the environment and (2) may be of interest to the end user. Bee-Nav purposely sacrifices these advantages to substantially reduce computational requirements. The small visual homing neural networks use up to 42.3 kB of memory, which is approximately three orders of magnitude less than the memory required by high-precision maps (hundreds of MBs for modestly sized environments2,3; Supplementary Information Section 9). Moreover, the networks are computationally efficient: they easily run on the robot’s Raspberry Pi 4 and could even be suitable for microcontroller processors. This implies substantially reduced mass, power and economic cost of computing hardware. Despite its present limitation to a single home location, Bee-Nav already enables robots to move in an area of interest, perform tasks there and occasionally return home for recharging or bringing back data or objects. This will enable swarms of small, lightweight robots to perform applications such as monitoring crops in greenhouses or tracking inventory in warehouses. For real-world application, the inherent passive safety brought by lightweight robots44 will be essential, because it ensures the safety of human workers. The computational and memory efficiency of Bee-Nav can also bring benefits for larger autonomous robots, but this will not extend to all robot scales and tasks. We identify five research avenues to further improve and characterize the approach. First, the visual homing of the robot should be followed by the recognition of the home, which could be a recharging station, and a subsequent precision landing. Second, in the case that visual homing fails, the robot might improve its chances of still arriving home by executing a structured search—just as insects do28. Third, path integration in outdoor environments could be improved by including a magnetometer or sun detection system for better heading estimation. This will substantially extend the navigation range for a given LHA size (Fig. 2b). Fourth, the visual homing networks could output not only a home vector but also a measure of uncertainty. This would enable the robot to start homing immediately when it starts recognizing the LHA, combining information from path integration and view memory27. Moreover, the robot could use its uncertainty to trigger a new learning flight if the environment around the home changes substantially, for example, if an important visual landmark is removed. Fifth, it would be beneficial to perform a deeper investigation of the environments and conditions in which visual homing neural networks can successfully learn to predict home vectors. Given the high capacity of deep neural networks, we expect that they will be able to exploit relevant visual landmark information, even if it is scarce. Nevertheless, it remains an open question how large a deep neural network needs to be to extract the visual homing information in a given environment and for a specific size of the LHA. Our experiments show that very small neural networks (3.4–42.0 kB) may already suffice for LHAs on the order of about 20–120 m2 in different real-world environments. However, there may be environments for which these networks do not have sufficient capacity. A robot would be able to detect this by itself, because it would lead to a high training error. The robot could then automatically scale up the complexity of the network. Still, there are environments with scarce visual landmarks, such as long office corridors with many similar-looking places or large, wide-open terrains. This would also lead to a high training error, but scaling up the network would not improve performance. In real applications, either end users or the robots themselves could choose home locations to ensure the presence of identifiable, close-by landmarks. Other conditions could have an influence on successful learning, such as opaque or dynamic objects. Dynamic objects that only occupy a small part of the image (such as the experimenter at some distance from the drone) have a negligible influence on the predictions (Supplementary Information Section 8). However, dynamic phenomena that change a large part of the omnidirectional image, such as sun glare, can affect the performance. Dealing with such situations may require modifying the sensor set-up or performing more image processing (for example, masking out dynamic objects). Opaque objects in the LHA do not affect the learning success, as the home vector targets are determined by path integration (Supplementary Video 5, Supplementary Information Section 8 and Fig. 3a). For biology, the proposed strategy offers a new perspective on flying insect navigation. The robotic experiments have shown that Bee-Nav successfully passes the test of the real world. One of its essential elements is that path integration provides the targets for home-vector learning. In our theoretical analysis, we show that self-supervised learning on the basis of imperfect path integration estimates leads to tortuosity of the visual homing trajectory (Supplementary Information Section 4). We performed a preliminary verification of the potential biological relevance of this finding by means of reanalysing honeybee learning and foraging flight data4 (Supplementary Information Section 7). It shows that the behaviour of honeybees is characteristic of the considered manner of learning. However, specific experiments will be necessary to uniquely identify path-integration-based learning as the cause of the tortuous trajectories. This could involve manipulating the path integration machinery45 of the insect during learning flights and evaluating ensuing inbound flight patterns. Another notable element of the strategy is the learning of a full home vector, representing homing direction and distance. Robotic experiments demonstrated the use of the vector’s magnitude, allowing speed modulation for faster visual homing at larger distances. Knowledge of home distance aligns with biological observations, both behaviourally46,47,48 and neuronally18. To enhance the potential relevance to biology, future work could aim for biologically more plausible neural networks. A promising avenue is to enhance the neural networks inspired by the insect mushroom body32,39 to estimate higher-resolution directions instead of just discerning between left and right. This could be achieved by mapping the Kenyon cells in this method to a larger set of output neurons, potentially representing directions in a similar manner to ring attractors18. It could also be worthwhile revisiting known neural data from, for example, the insect mushroom body and investigating whether the neural structure could encode more fine-grained directional data. Finally, in our current implementation, the robot uses a home vector, expressed in its body reference frame, for direct action. Moreover, it learns only the area around the home location. Hence, the present proposed navigation strategy does not yet involve any cognitive map according to the common definition49. In future work, the strategy could be extended to include the learning of different places and the capability to take shortcuts between them. As suggested previously50, if two different places are stored in memory in a global, home-centred reference frame, a simple vector subtraction would suffice for determining the vector from one place to the other along an unvisited path. Although such an extension to Bee-Nav would be straightforward to implement when done with a traditional algorithm, it will be more challenging to realize this with neural machinery alone. Robotic experiments could show the costs and benefits of such an extended strategy, helping to bring the ingredients and trade-offs of using neural cognitive maps into sharper focus. The results in Fig. 2 are based on two simulators: (1) a simplified simulator that was used to determine the ratio of the LHA versus the total navigation area; and (2) a visually realistic simulator that was used to test the visual homing with a convolutional neural network in various generated forest environments. In this simulator, we simulate a drone flying outwards from a starting position for a given time period and then trying to return straight home. Reflecting the real experiments, we model the drone as using a noisy gyroscope measurement for updating its heading and a noisy velocity measurement for estimating its travel distance. During both the outbound and the inbound flight, the drone determines its position with the help of path integration. Owing to the noisy nature of the heading update and the velocity estimation, the path-integration-estimated position will increasingly drift from the ground-truth position. We use a Gaussian noise model for path integration drift22,27,53. For ‘compass-less’ path integration, as performed by the real drone, the model adds noise to the heading estimate after each time step in the simulation. To this end, samples are drawn from the normal distribution \({\varepsilon }_{\psi }\sim {\mathcal{N}}(0,t{\sigma }_{\psi }^{2})\), in which t is the time in seconds. The noise is added to the actual turn rate and accumulates over time, leading to substantial heading drift: \(\hat{\psi }\leftarrow \hat{\psi }+\dot{\psi }+{\varepsilon }_{\psi }\). Furthermore, the velocity estimation noise is likewise drawn from the normal distribution \({\varepsilon }_{d}\sim {\mathcal{N}}(0,{d\sigma }_{d}^{2})\), in which d is the distance travelled in the simulation time interval. It accumulates in the position estimate of the simulated drone: \(\hat{x}\leftarrow \hat{x}+\cos (\hat{\psi })(d+{\varepsilon }_{d})\) and \(\hat{y}\leftarrow \hat{y}+\sin (\hat{\psi })(d+{\varepsilon }_{d})\). With this “path integration noise model, the simulated drone performs a 3-min outbound flight with a speed of 2 m s−1. To simulate a search task, the simulated drone flies a block-like search pattern, changing direction after every 40 m. After the outbound flight, the drone attempts to fly straight home with a higher speed of 4 m s−1. Every 0.5 s, the simulated drone changes its heading to point at the presumed home location. The simulation run stops when the drone estimates that it is at (0, 0). The statistics per noise setting are based on 1,000 such simulation runs. For the investigation of different noise levels, both elements of the noise model are scaled with the factors (0.1, 0.25, 0.5, 0.75, 1.0, 1.5). The sizes of the circular LHA and total flight area are then based on the 99th percentile of the distances from the home location, for both the outbound end points and the inbound end points. We also model ‘compass-based’ path integration, as performed by some robots with a magnetometer31 and by insects by using sky-light polarization42. In that case, at each time step, the simulated drone receives the actual heading perturbed by Gaussian noise: \(\hat{\psi }\leftarrow {\psi }^{\ast }+{\varepsilon }_{\psi }\). This leads to much more accurate path integration. For the simulation experiments, we selected noise settings that resulted in a similar drift to that recorded in our own experiments or in the literature (Supplementary Information Section 11). Notably, we selected σψ = 0.63° and σd = 0.10 m to best approximate the odometry drift of our own robotic system, which gave a mean yaw drift after 100 s of 5.10° and a mean position drift after 100 m of 0.88 m. The main goal of this simulator was to determine whether a convolutional neural network is able to reliably estimate home vectors from visually realistic images, using these estimates to travel to the home location within the LHA. The simulator used is NVIDIA’s Isaac Sim54, as it allows quick acquisition of omnidirectional images. We use a photo of a meadow landscape as background image and generate a ‘forest’ by placing 40 trees from NVIDIA’s vegetation library in a 50 × 50-m area around the home location. The trees are placed uniformly into this area, while ensuring that: (1) a 5-m-radius circle around the home is free so that it is accessible; (2) trees are further away from each other than 5 m to avoid intersection; and (3) there are maximally three trees in a 10-m-radius circle around the home location to avoid too much clutter in the learning area. The experiments reported in Fig. 2 are based on ten such randomly generated forest environments. Proposed strategy details. For the aggregate results in Fig. 2, we performed experiments in ten different environments. In each environment, we first perform a learning flight with the same learning flight pattern followed by the robot, with parameters nloops = 6, mpoints = 150 and bspacing = 0.35 (see the ‘Learning flight’ section). As in the real robot experiments, the learning flight positions assumed by the robot are different from the actual positions owing to path integration drift. If a position risks being inside a tree, it is moved to be 0.5 m away from the landmark centre. The learning flight results in 147 images taken in a 10-m-radius area. The noisy positions and headings resulting from the path integration are used for determining the targets for the neural network learning. We train an attention network (explained later) for 150 epochs by using the Adam optimizer with a learning rate of 0.0005 and batch size of 8. We use 95% of the dataset for training and 5% for determining a validation loss. During training, rotational augmentation is used, in which each sample image and target are rotated with the same uniformly random angle from the interval [0, 2π]. After training, we simulate a homing run as follows. An omnidirectional picture is taken at the initial location. It is fed to the neural network, which determines a home vector that has both a direction and a magnitude. The vector is used in the same way as on the robot to determine a step size and direction (see the ‘Use of output’ section). When within 2 m of a tree, the desired motion vector is adapted with a basic artificial potential field method55 to veer away from the obstacle. After executing the step, a new image is taken and the procedure is repeated. Each run ends when the simulated drone comes within 1.2 m of the home location or when it has taken 50 steps. For obtaining the aggregated results in Fig. 2, we perform homing runs at 16 locations for different distances, equally spread around a circle. If an initial position is closer to a tree than 1 m, it is moved away from the tree centre to a distance of 1 m. The initial distance is determined by the radius factor, for which 1.0 places the drone at the edge of the LHA. The investigated radius factors are (0.5, 1.0, 1.5, 2.0, 2.5). Snapshot method. We compare the proposed strategy with a snapshot-based method34. The motivation for choosing this particular snapshot method is that its performance is robust if the current view is similar enough to the snapshot. For this method, a single snapshot is taken at the home location. The simulated drone performs homing as follows: it first moves to a position to the left, right, front and back of the current position. At each displaced position, an image is taken. This image is exhaustively rotated pixel by pixel. For each rotation, the image difference D = |Ic − Is| is determined with the home snapshot, in which Ic is the current, rotated image and Is is the snapshot image. Per displacement, the minimal image difference min(D) is retained. Having four values for the image difference allows the simulated robot to estimate the best direction to reduce the image difference (Dx, Dy). The robot then moves 0.5 m in that direction. Although this method requires only a single snapshot at the home location, it does require many movements on the part of the robot. Moreover, exhaustive rotations are computationally expensive. Perfect memory method. We also implemented a method that uses the same learning images as the proposed strategy but now stores them for exhaustive matching during navigation. Hence, this perfect memory method stores 147 ‘snapshots’. At each time step, the simulated robot compares the current image with all snapshot images, using the same procedure as detailed for the snapshot method—rotating the image pixel by pixel and retaining the minimal image difference (min(D)) per snapshot. After this exhaustive image matching, the k = 3 most similar snapshots are selected and the corresponding target vectors averaged to give the desired motion vector. This method is inspired by two perfect memory methods from the literature51,52. Both of these methods are more efficient than exhaustive matching in different ways. In ref. 52, only four snapshots were chosen out of all snapshot images made on a grid, on the basis of an observation that more snapshots did not substantially improve homing performance. Here we included all snapshots to ensure maximal performance at the cost of more computation. In ref. 51, the navigation was purely based on left and right commands, depending on the home being visible in the left or right visual hemisphere during a real wasp’s learning flight. Here we stored real-valued target vectors, that is, with a direction and a distance, for better performance and more adequate comparison with the proposed navigation method. The robotic platform is a custom-built quadcopter that operates autonomously, with all perception and computing handled by onboard systems without reliance on external positioning (Extended Data Fig. 1). The drone is equipped with a Raspberry Pi 4 as its primary onboard computer. A Pixhawk 6C Mini flight controller, running the PX4 autopilot firmware, manages low-level flight control. The perception system consists of several key sensors. A Raspberry Pi V2 camera fitted with a catadioptric omnidirectional lens (Kogeto Dot 360 panoramic lens) serves as the main vision sensor. For odometry, a PMW3901 optical flow sensor provides horizontal motion data, whereas a TFmini-S LiDAR rangefinder measures height for vertical positioning. These raw sensor data are combined with inertial measurement unit data by an extended Kalman filter, running on the Pixhawk, to generate the final odometry estimate (position relative to home and current heading). Furthermore, a RealSense D435i depth camera and TF-Nova range sensors are attached for some of the experiments and used only for obstacle avoidance (see the ‘Obstacle avoidance’ section). Finally, a Holybro F9P GPS module is mounted to record ‘ground-truth’ position data during outdoor experiments. Other available sensors, such as the magnetometer and barometer, are disabled for all experiments to ensure consistency. The onboard software operates in a modular architecture using Docker containers. The primary vision system resides in a dedicated ‘camera container’, for which the omnidirectional camera is activated by an HTTP request. Within this container, captured images are first preprocessed using the methods detailed in the ‘Image processing’ section. Within the same container, the network then performs inference and outputs a 2D vector that represents the predicted coordinates of the home position in the current body reference frame of the drone. This vector is subsequently used to derive the desired yaw angle and distance to home, which are relayed back to the main navigation node for flight control. The ‘navigation node’ runs in a separate container using ROS2. It receives the output from the neural network as well as current state estimates (position and heading) from the PX4 autopilot56. On the basis of this information, it sends high-level control commands back to the PX4. Sensor data are routed directly to the flight controller: optical flow data are transmitted by means of UART and distance sensor data are passed by means of I2C. A catadioptric omnidirectional camera, which uses a convex mirror and a vertically oriented lens, captures a 360° panoramic view. As can be seen in Extended Data Fig. 3a, the raw output is an annular (ring-shaped) RGB image, in which the central and outer areas contain no useful visual information. A preprocessing pipeline is applied to each image. First, the annular region of interest is isolated using a predefined binary mask. Second, this region is unwrapped into a rectangular panorama through a linear–polar transformation, implemented with the linearPolar function from the OpenCV library. Finally, the resulting image is rotated to align with the body-frame orientation of the drone and resized to 3 × 192 × 1,800 pixels, as required by the neural network. The network training uses a self-supervised learning approach in which ground-truth labels are derived directly from the onboard odometry data of the drone. As described in Extended Data Fig. 4, for each captured image, the estimated global position of the drone to home, represented by the vector \({\bf{p}}=[\begin{array}{c}{p}_{x}\\ {p}_{y}\end{array}]\), and its estimated heading (yaw), ψdrone, are logged. The objective is to calculate a target home vector label, L, which represents the home position in the body-fixed reference frame of the drone. This vector is computed in two steps. First, the vector pointing from the current position of the drone to the home origin (0, 0) in the world frame is determined, which is simply −p. Second, this vector is transformed into the reference frame of the drone by applying a clockwise 2D rotation matrix, R(−ψdrone), which aligns the world frame with the current heading of the drone. The final label vector L is calculated using the following operation: The resulting components, Lx and Ly, directly represent the coordinates of the home location relative to the forward-facing perspective of the drone. This vector L serves as the ground-truth label for training the neural network. Strong wind conditions (> 5 m s−1 with gust >10 m s−1) pose a substantial challenge during outdoor flights, forcing the drone to maintain a large tilt angle—up to 30°—to counteract the aerodynamic forces. This tilt introduces two primary issues in the captured omnidirectional images, which can provide false cues to the neural network. First, if wind conditions cause the tilt of the drone to differ from what it was during the learning phase, the learned visual cues—such as the apparent distance from landmarks to the bottom of the frame—become unreliable. This can lead to a faulty estimation of the true position of the drone, even when it is at the correct spot. Second, it causes a sinusoidal distortion of the horizon line in the unwrapped panoramic image, which in turn corrupts the perceived spatial relationships between landmarks. These problems caused by camera tilt are well known in the omnidirectional vision-based homing literature57. To mitigate these effects, we correct the distortion by dynamically adjusting the centre point used in the linearPolar unwarping process (also see Extended Data Fig. 3d). Two methods are used to determine the necessary offset for this unwarping centre: (1) model-based correction: a linear model maps the current pitch and roll angles of the drone, obtained from the extended Kalman filter, to the required x–y offset for the unwarping centre and (2) vision-based correction: when a clear horizon is visible, it is detected in the image and used as a geometric reference to calculate the centre point that flattens the sinusoidal distortion. This vision-based method is reminiscent of the method presented in ref. 58. Both methods have their weaknesses, so the choice between these two correction methods is made dynamically on the basis of environmental conditions. The vision-based correction is given priority in environments with a consistently visible ground horizon, as it adapts in real time to the current image and is independent of other sensor measurements that may be subject to delay. In environments in which a stable horizon is not available, the system defaults to the model-based correction, which provides sufficient reliability. Please note that, if the model-based correction relies on attitude estimates based on the inertial measurement unit, it will be susceptible to drift over time. This can deteriorate the results for long trajectories. Two neural network models have been proposed for the visual homing mode: an extremely lightweight convolutional neural network (referred to as the ‘compact network’) and an only slightly larger attention-based Inception network (referred to as the ‘attention network’). The detailed architecture of these two models can be seen in Extended Data Fig. 2. The compact network is designed for high efficiency, containing four convolutional layers and a final fully connected output layer with two neurons, with a total of only 868 parameters (3.4 kB). The attention network has 10,820 parameters (42.3 kB) and is built on two custom Inception modules59. Each module uses parallel branches with different kernel sizes, pooling and dilated convolutions to capture features at several scales. Crucially, each module also incorporates a spatial attention mechanism60, which generates a map to reweight features and allow the network to focus on the most salient spatial regions of the image. This second, slightly deeper network is composed of the two Inception modules, two extra convolutional layers and two fully connected layers, with weights initialized using the Xavier uniform method. Both models use the tanh activation function and are designed to take panoramic colour images with a size of 3 × 192 × 1,800 pixels as input. The output of the network is a 2D home vector \({{\bf{h}}}_{{\rm{pred}}}=[\begin{array}{c}{h}_{x}\\ {h}_{y}\end{array}]\). which represents the predicted location of the home position in the body-fixed reference frame of the drone. This vector is directly translated into control commands, as described in Extended Data Fig. 5. The required change in heading, ∆ψ, is determined by the angle of the vector, calculated as ∆ψ = atan2(hx, hy), in which a positive angle corresponds to a clockwise rotation. The magnitude of the vector, dpred = ‖hpred‖, determines the step size (distance), s, for the next forward movement of the drone according to the linear relationship s = kdpred + smin, in which k is a scaling factor and smin is the minimum distance it should take. For our experiments, we use a constant scaling factor of k = 0.13. The minimum step size, smin, is set to 0.1 during standard tests and increased to 0.5 in windy conditions to ensure that the drone makes sufficient progress against aerodynamic forces. After rotating to the new heading, the drone moves forward a distance s. On reaching this new position, the cycle repeats with the capture of a new image. This strategy ensures larger steps when far from home and smaller, more precise steps near the target to prevent overshoot. Experiments were conducted across a variety of indoor and outdoor environments to validate the robustness and scalability of the system (Extended Data Fig. 6). Initial algorithm validation (visual learning and homing) was performed in the 10 × 10-m CyberZoo at TU Delft, a controlled lab space with motion capture system as ground truth. Full-scale flight tests were conducted in larger, more challenging locations. To test performance in GPS-denied environments, we used two indoor hangars: the 30 × 40-m Unmanned Valley indoor facility in Valkenburg, the Netherlands (the large indoor area), which provides a large, visually structured area, and a 30 × 25-m section of the Delft Drone Initiative flight hall (the small indoor area). To test against more challenging conditions, outdoor experiments were performed in two distinct open-field environments: the outdoor test field at Unmanned Valley, a 400 × 500-m permissible flight area (the large outdoor area), characterized by natural terrain and lighting in an open field, and a 35 × 20-m tennis court in Sardinia, Italy (the small outdoor area), which provided a visually distinct, closed scene. In a new environment, the drone acquires training data during a learning flight conducted in a small area around the designated home location. Because the learning flight trajectory determines the data for learning the homing vector, it has a substantial influence on the subsequent homing performance. In our experiments, we did not mimic the actual, varying honeybee learning trajectories (Supplementary Information Section 7). Given the proposed technological solution, we opted for a trajectory pattern that ensured covering a circular region around the home location. A comparison of an Archimedean spiral with a ‘wasp-like’ flight pattern51,61 showed that the latter resulted in better homing performance, as it does not lead to the learning of spurious cues (Supplementary Information Section 6). Hence, the wasp-like pattern was used for all experiments. This pattern is generated algorithmically, starting with a classical Archimedean spiral defined in polar coordinates by the equation r = bθ, in which r is the radius, θ is the angle and the parameter b controls the distance between the arms of the spiral. The angle θ is discretized into m steps over a total of n full rotations, spanning from 0 to 2nπ. The key ‘wasp-like’ modification is a periodic mirroring of the trajectory: each time the path crosses the negative y-axis, the x-coordinates for all subsequent points are inverted. This creates a series of back-and-forth loops that expand outwards from the centre. The parameters are adjusted on the basis of the environment size; for example, for a small 10 × 10-m area, the path consists of nloops = 4 discretized into mpoints = 36 waypoints with bspacing = 0.1, creating a learning flight with a maximum radius of approximately 2.5 m. For larger outdoor areas, the pattern is expanded to nloops = 5 loops with mpoints = 36 waypoints and bspacing = 0.2, resulting in a learning flight with a maximum radius of approximately 6.3 m. Once learning is completed, the network is trained using one of the learning set-ups described below. Depending on the mission constraints and resource availability (for example, time, hardware and so on), one of three distinct learning set-ups can be used: offboard, offline learning; onboard, offline learning; and onboard, online learning. Extended Data Table 1 summarizes the computational requirements and performance in one of the experiments for each set-up. Offboard, offline learning is used when a ground station with sufficient processing power (a modern CPU) and data transmission (for example, Wi-Fi, capable of transferring approximately 100 MB of data) is available. On completion of the learning flight, the raw omnidirectional images and associated labels (generated from the specific odometry data; see the ‘Data labelling’ section) are transferred to a ground station laptop. During the experiments, we used an Apple MacBook Air, with Apple M1 chip and 8 GB unified memory. The network is trained using extensive data augmentation to improve generalization, specifically by means of virtual rotation and colour augmentation (also see Extended Data Fig. 3b,c). For virtual rotation, we make use of the panoramic nature of the omnidirectional images to simulate different camera headings from a single captured frame. This is achieved by horizontally shifting the image pixels to rotate the gaze direction of the camera. For each captured image, we generate 360 new training samples by rotating the gaze in 1° increments. The corresponding label vector is recalculated for each shift to reflect the new relative heading to the home position. Subsequently, colour augmentation is applied to account for variable outdoor lighting. We duplicate each virtually rotated image and adjust its brightness by a factor sampled from U(0.9, 1.1) and its contrast by a value from U(−10, 10). For onboard, offline learning, when a ground station is unavailable or data transmission is unreliable, training is performed locally on the drone’s onboard computer (Raspberry Pi 4). To accommodate faster training with the more limited computational resources, we introduce two optimizations compared with the offboard approach. First, colour augmentation is omitted to reduce preprocessing overhead and duplication of the dataset. Second, the virtual rotation step size is increased from 1° to 5°, reducing the training dataset size by a factor of five. Despite the slower onboard processor, these optimizations ensure that the total training time remains comparable with offboard methods while maintaining successful homing performance. For missions requiring immediate execution (for example, outbound flights have to be executed less than 2 min after the learning flight), we use onboard, online learning. In this mode, training initiates in-flight immediately after the first image is captured. We use multithreaded processing on the Raspberry Pi: specific cores are dedicated to navigation and communication, whereas two cores are isolated for network training. Image capture and training happen asynchronously. Captured images are continuously appended to an image bank (stored as tensors in RAM), which serves as a replay buffer for the training thread. Given the short duration of the learning flight and the small number of images, the memory footprint is manageable, eliminating the need for a deletion policy. The training thread continuously samples batches from this buffer and applies random virtual rotation (sampled from virtual rotation step size of 1º). Training concludes exactly one minute after the learning flight ends; this interval ensures that the final learning images are sufficiently represented in the training distribution. All training configurations use the Adam optimizer with a learning rate of 9 × 10−4 and a batch size of 4. The offboard and onboard methods are trained for one epoch, whereas the online learning set-up uses a continuous rolling update strategy. All methods were validated in the CyberZoo environment, achieving a 100% success rate across all visual homing trials. Extended Data Table 1 and Fig. 3b summarize the training configuration and navigation performance for each method. After the learning, the forage part of the navigation strategy is implemented as a three-phase process: an outbound search, an inbound return through odometry and a final visual homing phase. During the outbound phase, the drone follows a predefined trajectory designed to cover the test area. Throughout this phase, the drone continuously updates its state estimate (position and heading) relative to its starting point using onboard odometry. Although simple paths are used for most experiments, more complex patterns, such as a grid search, are also used in some indoor environments to simulate real-world applications such as search and rescue. Once the outbound trajectory is complete, the drone switches to the inbound phase. The flight controller is commanded to return to the home coordinates (0, 0) based on the current odometry estimate. The drone executes a direct, high-speed flight towards this estimated home position. On reaching the odometry-based goal, the final visual homing phase is initiated. Owing to the expected accumulation of odometry drift, the estimated position of the drone does not perfectly align with its true starting location. Therefore, the system switches to the neural-network-based visual control strategy, described previously in the ‘Use of output’ section, to perform the final, precise approach to the home location. In all of our experiments, the home location is not visible by itself, so we stop the experiments when the drone arrives close enough to the home location. A success is hereby defined as the drone ending up within 0.5 m of the home location. Some example trajectories of these full flights can be seen in Extended Data Figs. 7 and 8. Inspired by Wedgebug62, we implemented a reactive detect-and-avoid system based on a finite-state machine, in which the sensing hardware evolved to match the computational constraints of the onboard Raspberry Pi. Initial experiments used an Intel RealSense D435i depth camera with the depth map segmented into left, centre and right average-depth bins, whereas the later experiments used three TF-Nova LiDAR sensors monitoring a 1° × 14° field of view for each sector. The avoidance logic interrupts the primary navigation loop whenever the front distance dfront drops below a predefined stopping threshold dstop, at which point the evasion trajectory is calculated on the basis of the specific flight phase. For the learning, outbound and inbound phases, the core avoidance logic is identical. The system monitors the left, centre and right sectors. If the centre is blocked, the drone determines which side (left or right) is clear, rotates in that direction and executes a forward movement of devade. Immediately after this evasion, it realigns its yaw to face the original target waypoint. If all three sectors (left, centre and right) are blocked, the system triggers a panic mode: the drone rotates by a larger angle ψdrone, travels a distance of dpanic and attempts to resume navigation by realigning to the target waypoint again in this new position. However, if after nattempts the same target waypoint is still not reached, the next movement differs by phase: Learning phase: if the point remains unreachable after n tries, the system skips it, takes an image and records the label at the current position and heading and proceeds to the next learning waypoint. Outbound phase: if blocked, the system skips to the next outbound waypoint. If the outbound path is completed, it automatically switches to the inbound phase. Inbound phase: the system persists in trying to reach the odometry coordinates (0, 0). However, if the drone is stuck but within 2 m of the odometry coordinates (0, 0), it aborts the inbound flight and immediately switches to visual homing. During the homing phase, the detection logic (checking left/centre/right) and the evasion movement devade remain the same. However, the post-evasion behaviour is different: the drone does not realign to the previous target. Instead, it simply captures a new image at its current position, queries the network for a new prediction, rotates to this new predicted heading and restarts the obstacle detection and evasion loop again. The biological reanalysis data are available from the corresponding authors on reasonable request. All robotic experimental data are available at https://doi.org/10.4121/a0217a20-0443-48b2-8a04-9609ac267029. All codebases (running the simulation experiments, onboard the robot, training and evaluating the networks) that have been used to generate the results in this article are available at https://github.com/tudelft/Bee-Nav. Beekman, M. & Ratnieks, F. L. W. Long-range foraging by the honey-bee, Apis mellifera L. Funct. Ecol. 14, 490–496 (2000). Article Google Scholar Herrera-Granda, E. P., Torres-Cantero, J. C., Rosales, A. & Peluffo-Ordóñez, D. H. A comparison of monocular visual SLAM and visual odometry methods applied to 3D reconstruction. Appl. Sci. 13, 8837 (2023). Article CAS Google Scholar Sharafutdinov, D. et al. Comparison of modern open-source visual SLAM approaches. J. Intell. Robot. Syst. 107, 43 (2023). Article Google Scholar Degen, J. et al. Exploratory behaviour of honeybees during orientation flights. Anim. Behav. 102, 45–57 (2015). Article Google Scholar Capaldi, E. A. & Dyer, F. C. The role of orientation flights on homing performance in honeybees. J. Exp. Biol. 202, 1655–1666 (1999). Article CAS PubMed Google Scholar Capaldi, E. A. et al. Ontogeny of orientation flight in the honeybee revealed by harmonic radar. Nature 403, 537–540 (2000). Article ADS CAS PubMed Google Scholar de Croon, G. C. H. E., De Clercq, K. M. E., Ruijsink, R., Remes, B. & de Wagter, C. Design, aerodynamics, and vision-based control of the DelFly. Int. J. Micro Air Veh. 1, 71–97 (2009). Article Google Scholar Ma, K. Y., Chirarattananon, P., Fuller, S. B. & Wood, R. J. Controlled flight of a biologically inspired, insect-scale robot. Science 340, 603–607 (2013). Article ADS CAS PubMed Google Scholar Ferrera, M., Eudes, A., Moras, J., Sanfourche, M. & Le Besnerais, G. OV2SLAM: a fully online and versatile visual SLAM for real-time applications. IEEE Robot. Autom. Lett. 6, 1399–1406 (2021). Article Google Scholar Bavle, H., De La Puente, P., How, J. P. & Campoy, P. VPS-SLAM: visual planar semantic SLAM for aerial robotic systems. IEEE Access 8, 60704–60718 (2020). Article Google Scholar Boal, J., Sánchez-Miralles, A. & Arranz, A. Topological simultaneous localization and mapping: a survey. Robotica 32, 803–821 (2014). Article Google Scholar Garcia-Fidalgo, E. & Ortiz, A. Vision-based topological mapping and localization methods: a survey. Robot. Auton. Syst. 64, 1–20 (2015). Article Google Scholar Khan, M. A. & Labrosse, F. Visual topological mapping using an appearance-based location selection method. In Proc. Annual Conference Towards Autonomous Robotic Systems (eds Mohammad, A., Dong, X. & Russo, M.) 90–102 (Springer, 2020). Niculescu, V., Polonelli, T., Magno, M. & Benini, L. Nanoslam: enabling fully onboard slam for tiny robots. IEEE Internet Things J. 11, 13584–13607 (2023). Article Google Scholar Webb, B. The internal maps of insects. J. Exp. Biol. 222, jeb188094 (2019). Article PubMed Google Scholar Wehner, R. & Wehner, S. Insect navigation: use of maps or Ariadne’s thread? Ethol. Ecol. Evol. 2, 27–48 (1990). Article Google Scholar Cartwright, B. A. & Collett, T. S. How honey bees use landmarks to guide their return to a food source. Nature 295, 560–564 (1982). Article ADS Google Scholar Stone, T. et al. An anatomically constrained model for path integration in the bee brain. Curr. Biol. 27, 3069–3085 (2017). Article CAS PubMed PubMed Central Google Scholar Denuelle, A. & Srinivasan, M. V. A sparse snapshot-based navigation strategy for UAS guidance in natural environments. In Proc.2016 IEEE International Conference on Robotics and Automation (ICRA) 3455–3462 (IEEE, 2016). Franz, M. O., Schölkopf, B., Mallot, H. A. & Bülthoff, H. H. Where did I take that snapshot? Scene-based homing by image matching. Biol. Cybern. 79, 191–202 (1998). Article Google Scholar Stürzl, W. & Mallot, H. A. Efficient visual homing based on Fourier transformed panoramic images. Robot. Auton. Syst. 54, 300–313 (2006). Article Google Scholar van Dijk, T., De Wagter, C. & de Croon, G. C. H. E. Visual route following for tiny autonomous robots. Sci. Robot. 9, eadk0310 (2024). Article PubMed Google Scholar Baddeley, B., Graham, P., Husbands, P. & Philippides, A. A model of ant route navigation driven by scene familiarity. PLoS Comput. Biol. 8, e1002336 (2012). Article ADS CAS PubMed PubMed Central Google Scholar Zhu, L., Mangan, M. & Webb, B. Neuromorphic sequence learning with an event camera on routes through vegetation. Sci. Robot. 8, eadg3679 (2023). Article PubMed Google Scholar Collett, T. S. & Collett, M. Path integration in insects. Curr. Opin. Neurobiol. 10, 757–762 (2000). Article CAS PubMed Google Scholar Wehner, R. Desert ant navigation: how miniature brains solve complex tasks. J. Comp. Physiol. A 189, 579–588 (2003). Article ADS CAS Google Scholar Wystrach, A., Mangan, M. & Webb, B. Optimal cue integration in ants. Proc. R. Soc. B 282, 20151484 (2015). Article PubMed PubMed Central Google Scholar Lambrinos, D., Möller, R., Labhart, T., Pfeifer, R. & Wehner, R. A mobile robot employing insect strategies for navigation. Robot. Auton. Syst. 30, 39–64 (2000). Article Google Scholar Dupeyroux, J., Serres, J. R. & Viollet, S. AntBot: a six-legged walking robot able to home like desert ants in outdoor environments. Sci. Robot. 4, eaau0307 (2019). Article PubMed Google Scholar Wang, Z., Qu, J. & Morin, P. Airflow-based odometry for MAVs using thermal anemometers. Int. J. Micro Air Veh. 15, 17568293221148385 (2023). Article Google Scholar Stankiewicz, J. & Webb, B. Using the neural circuit of the insect central complex for path integration on a micro aerial vehicle. In Proc.Conference on Biomimetic and Biohybrid Systems (eds Vouloutsi, V. et al.) 325–337 (Springer, 2020). Ardin, P., Peng, F., Mangan, M., Lagogiannis, K. & Webb, B. Using an insect mushroom body circuit to encode route memory in complex natural environments. PLoS Comput. Biol. 12, e1004683 (2016). Article ADS PubMed PubMed Central Google Scholar Möller, R. Insect visual homing strategies in a robot with analog processing. Biol. Cybern. 83, 231–243 (2000). Article PubMed Google Scholar Zeil, J., Boeddeker, N. & Stürzl, W. in Flying Insects and Robots (eds Floreano, D., Zufferey, J. C., Srinivasan, M. & Ellington, C.) 87–100 (Springer, 2010). Kendall, A., Grimes, M. & Cipolla, R. PoseNet: a convolutional network for real-time 6-DOF camera relocalization. In Proc. IEEE International Conference on Computer Vision 2938–2946 (IEEE, 2015). Chen, C., Wang, B., Lu, C., Trigoni, N. & Markham, A. Deep learning for visual localization and mapping: a survey. IEEE Trans. Neural Netw. Learn. Syst. 35, 17000–17020 (2023). Article Google Scholar Lochner, S., Honerkamp, D., Valada, A. & Straw, A. D. Reinforcement learning as a robotics-inspired framework for insect navigation: from spatial representations to neural implementation. Front. Comput. Neurosci. 18, 1460006 (2024). Article PubMed PubMed Central Google Scholar Wystrach, A. Neurons from pre-motor areas to the mushroom bodies can orchestrate latent visual learning in navigating insects. Preprint at bioRxiv https://doi.org/10.1101/2023.03.09.531867 (2023). Gattaux, G. G., Serres, J. R., Ruffier, F. & Wystrach, A. Visual homing in outdoor robots using mushroom body circuits and learning walks. In Proc. 14th International Conference on Biomimetic and Biohybrid Systems: Living Machines 2025 (eds Jiménez Rodríguez, A. et al.) 456–468 (Springer, 2025). Firlefyn, M. V. M., Hagenaars, J. J. & De Croon, G. C. H. E. Direct learning of home vector direction for insect-inspired robot navigation. In Proc. 2024 IEEE International Conference on Robotics and Automation (ICRA) 6022–6028 (IEEE, 2024). Delmerico, J. & Scaramuzza, D. A benchmark comparison of monocular visual-inertial odometry algorithms for flying robots. In Proc. 2018 IEEE International Conference on Robotics and Automation (ICRA) 2502–2509 (IEEE, 2018). Heinze, S., Narendra, A. & Cheung, A. Principles of insect path integration. Curr. Biol. 28, R1043–R1058 (2018). Article CAS PubMed PubMed Central Google Scholar Wang, Z., Chen, X., Okada, R., Walter, S. & Menzel, R. Encoding and decoding of the information in the honeybee waggle dance. Behav. Ecol. Sociobiol. 79, 53 (2025). Article Google Scholar SvatÝ, Z. et al. Impact analysis assessment of UAS collision with a human body. PLoS One 20, e0320073 (2025). Article PubMed PubMed Central Google Scholar Srinivasan, M. V., Zhang, S., Altwein, M. & Tautz, J. Honeybee navigation: nature and calibration of the “odometer”. Science 287, 851–853 (2000). Article ADS CAS PubMed Google Scholar von Frisch, K. The Dance Language and Orientation of Bees (Harvard Univ. Press, 1993). Esch, H. E. & Burns, J. E. Distance estimation by foraging honeybees. J. Exp. Biol. 199, 155–162 (1996). Article CAS PubMed Google Scholar Menzel, R. & Galizia, C. G. Landmark knowledge overrides optic flow in honeybee waggle dance distance estimation. J. Exp. Biol. 227, jeb248162 (2024). Article PubMed PubMed Central Google Scholar Wehner, R. & Menzel, R. Do insects have cognitive maps? Annu. Rev. Neurosci. 13, 403–414 (1990). Article CAS PubMed Google Scholar Cartwright, B. A. & Collett, T. S. Landmark maps for honeybees. Biol. Cybern. 57, 85–93 (1987). Article Google Scholar Stürzl, W., Zeil, J., Boeddeker, N. & Hemmi, J. M. How wasps acquire and use views for homing. Curr. Biol. 26, 470–482 (2016). Article PubMed Google Scholar Dewar, A. D. M., Philippides, A. & Graham, P. What is the relationship between visual environment and the form of ant learning-walks? An in silico investigation of insect navigation. Adapt. Behav. 22, 163–179 (2014). Article Google Scholar Thrun, S., Burgard, W. & Fox, D. Probabilistic Robotics (MIT Press, 2005). Zhou, Z. et al. Towards building AI-CPS with NVIDIA Isaac Sim: an industrial benchmark and case study for robotics manipulation. In Proc. 46th International Conference on Software Engineering: Software Engineering in Practice 263–274 (ACM, 2024). Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 5, 90–98 (1986). Article Google Scholar Meier, L., Honegger, D. & Pollefeys, M. PX4: a node-based multithreaded open source robotics framework for deeply embedded platforms. In Proc. 2015 IEEE International Conference on Robotics and Automation (ICRA) 6235–6240 (IEEE, 2015). Berganski, C., Hoffmann, A. & Möller, R. Tilt correction of panoramic images for a holistic visual homing method with planar-motion assumption. Robotics 12, 20 (2023). Article Google Scholar Natraj, A., Ly, D. S., Eynard, D., Demonceaux, C. & Vasseur, P. Omnidirectional vision for UAV: applications to attitude, motion and altitude estimation for day and night conditions. J. Intell. Robot. Syst. 69, 459–473 (2013). Article Google Scholar Szegedy, C. et al. Going deeper with convolutions. In Proc. 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 1–9 (Curran Associates, 2015). Woo, S., Park, J., Lee, J.-Y. & Kweon, I. S. CBAM: Convolutional Block Attention Module. In Proc. European Conference on Computer Vision (ECCV 2018) (eds Ferrari V., Hebert, M., Sminchisescu, C. & Weiss, Y.) 3–19 (Springer, 2018). Zeil, J., Kelber, A. & Voss, R. Structure and function of learning flights in bees and wasps. J. Exp. Biol. 199, 245–252 (1996). Article CAS PubMed Google Scholar Laubach, S. L. & Burdick, J. W. An autonomous sensor-based path-planner for planetary microrovers. In Proc. 1999 IEEE International Conference on Robotics and Automation 347–354 (IEEE, 1999). Download references We thank M. Mangan for reading and commenting on an earlier version of this manuscript. We are also grateful to S. Stroobants and E. van der Horst for their extensive help with resolving drone hardware issues, T. J. Singh and the MAVLab outdoor test crew for their assistance with the outdoor experiments and M. Yedutenko and the Delft Drone Initiative for lending their flight hall for the indoor experiments. Part of this project was financed by the Dutch Research Council (NWO) under grant number 20663 of the VICI personal grant programme and grant number NNWA.1292.19.298 of the Dutch Research Agenda (NWA). Micro Air Vehicle Laboratory, Department Control & Operations, Faculty of Aerospace Engineering, Delft University of Technology, Delft, The Netherlands Dequan Ou, Jesse J. Hagenaars, Maciej R. Jankowski, Michiel V. M. Firlefyn, Christophe De Wagter & Guido C. H. E. de Croon Experimental Zoology Group, Wageningen University, Wageningen, The Netherlands Florian T. Muijres Navigation Biology Group, Institute of Biology and Environmental Sciences, Carl von Ossietzky University of Oldenburg, Oldenburg, Germany Jacqueline Degen Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar All authors contributed to the conception of the study and the analysis and interpretation of the results. M.V.M.F. performed the early proof-of-concept simulation studies under the guidance of G.C.H.E.d.C. and J.J.H. G.C.H.E.d.C. performed the theoretical and simulation analysis in the Supplementary Information. The visual simulation experiments were developed and performed by M.J., J.J.H., D.O. and G.C.H.E.d.C. The neural networks used for visual learning and homing were developed by D.O., who also built the robot, developed the code, performed the real-world robotic experiments and analysed the data, with support from J.J.H., G.C.H.E.d.C. and C.D.W. Biological data were provided by J.D. Furthermore, F.T.M. and J.D. provided insights into the biological reanalysis. D.O. performed the reanalysis of the biological data. The manuscript was primarily written by G.C.H.E.d.C. and D.O., and the illustrations were made by D.O., G.C.H.E.d.C. and C.D.W. All authors contributed critically to the drafts and gave final approval for publication. Correspondence to Guido C. H. E. de Croon. The authors declare no competing interests. Nature thanks Barbara Webb and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. Peer reviewer reports are available. Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations. a, Isometric view of the drone, highlighting the omnidirectional camera (④), F9P GPS module (③) and the Raspberry Pi 4 onboard computer and Pixhawk 6C Mini flight controller housed in the main body (⑥ and ⑤, respectively). b, Bottom view showing the PMW3901 optical flow sensor (①) and the TFmini-S LiDAR sensor (②). c, System architecture diagram illustrating the data flow between sensors, the flight controller and the onboard computer. a, The lightweight compact network, a sequential model with four convolutional layers and one fully connected layer. The diagram specifies the kernel size, stride and channel depth for each layer. This model, with a total of 868 parameters (3.4 kB), was used in most experimental environments. b, The attention network, a deeper model with 10,820 parameters (42.3 kB), was used for the challenging, large and open outdoor environment. The main diagram shows the overall data flow and the inset provides a detailed view of the multibranch Inception module, which includes the spatial attention mechanism. a, The preprocessing pipeline. The raw image taken by the omnidirectional camera is masked, unwrapped and further resized to a format that fits the input size of the neural networks. b, Virtual rotation. The preprocessed images are virtually rotated to simulate the view seen when facing different headings, despite only one image being physically taken. This is achieved by cyclically shifting the image content horizontally (moving part of the image from left to right or vice versa). c, Colour augmentation. Each virtually rotated image is duplicated and augmented with a random brightness factor sampled from U(0.9, 1.1) and a contrast factor sampled from U(−10, 10). d, Wind correction. When wind affects the drone, the resulting tilt during image capture leads to artefacts in the preprocessed image. This is corrected by adjusting the centre position of the rectilinear unwarping. The new centre is obtained either by detecting the horizon line (dashed orange line) or by a model-based method that calculates the required centre shift using the pitch and roll measured by the drone at the moment of capture. a, The learning flight trajectory during one of the CyberZoo experiments. The solid line shows the ground-truth position captured by the OptiTrack motion capture system, serving as a reference. The dashed line shows the odometry position estimation (path integration). The inset highlights one of the learning points in which an image is captured and the corresponding odometry information is used for labelling. The direction of the arrows indicates the heading direction. The drift (red) illustrates the discrepancy between the noisy odometry estimate (orange) and the ground truth (blue). b, The odometry information is used to generate the label for the image captured at this location relative to the estimated home position (orange star). Owing to drift, this introduces noise to the label compared with the ‘correct’ label based on the true relative home location (blue star). The 2D label is generated by performing matrix multiplication using the heading and the current position relative to home. The magnitude of this label represents the distance between the current position and the home location, whereas the arctan of the label represents the desired angle to turn from the current heading to face home. a, Eight homing trajectories (blue lines) starting at different locations with varying headings (black arrows), reaching home (black star in the middle) using outputs (orange arrows) predicted by the compact network trained offline, offboard. The inset shows the first four steps of one of the homing trajectories. b, A detailed description of how the output (hpred) is used to obtain the control command (∆ψdrone and s). The arctan of the output is used to determine the heading change ∆ψdrone relative to the current heading to face home. The magnitude of the output predicts the distance from the current position to home and is used to determine the step size s for the drone to move forward along this heading. a, The CyberZoo flying arena at TU Delft (10 × 10 m) equipped with an OptiTrack motion capture system for ground-truth validation. b, The Delft Drone Initiative flight hall, a small indoor area (30 × 25 m) with consistent visual features. c,d, The indoor hangar at Unmanned Valley, Valkenburg, configured as a large indoor area with obstacles (30 × 40 m) (c) and without obstacles (d) to test navigation in cluttered versus open spaces. e, An outdoor tennis/football field (35 × 20 m), representing a small outdoor area enclosed by trees, providing distinct peripheral visual cues. f, The open test field at Unmanned Valley, Valkenburg, representing a large outdoor area (400 × 500-m permissible flight area) with natural terrain and a distant horizon, in which accurate GPS ground truth can be obtained. Several objects (a laid-down orange pole and two large features on the ground) were placed on the ground to provide landmarks in the surroundings of the home location. Although the omnidirectional camera could only see these features from some distance owing to the narrow field of view, these objects provided enough information for homing. The figure shows trajectories for each of the 30–110-m flights in four different environments. Each plot shows the robot’s learning flight (dark grey), the outbound phase (teal), followed by the inbound phase (orange) and the final visual homing phase (red) of the foraging flight. Trajectories are plotted using onboard odometry. All of the flights successfully ended up within 0.5 m around the home. For visualization purposes, trajectories based on odometry have been globally translated so that their final recorded point aligns with the true home position (0, 0), correcting for accumulated drift to accurately reflect the successful homing. Inset boxes provide quantitative metrics, including total distance and average velocity, for each phase of the flight. The figure shows trajectories for each of the 200–600-m flights in the 400 × 500-m Unmanned Valley, Valkenburg test field. Each plot shows the robot’s learning flight (dark grey), the outbound phase (teal), followed by the inbound phase (orange) and the final visual homing phase (red) of the foraging flight. Trajectories are plotted using high-precision GPS data. Three flights (marked as ‘Failed’ in red) did not successfully reach home owing to the challenging conditions in the large outdoor field. The flight in j reached 0.5 m within the home area, whereas the GPS data were slightly drifted. Inset boxes provide quantitative metrics, including total distance and average velocity, for each phase of the flight. This file contains Supplementary Sections 1–14 including Supplementary Figs. 1–33 and additional references. Visual learning and homing in CyberZoo. This video demonstrates the experimental procedure for the visual learning and homing components of the Bee-Nav system within a controlled indoor environment (10 × 10-m CyberZoo). The experiment begins with a learning flight, in which the drone autonomously collects training images and simultaneously trains a ‘compact’ neural network online using its onboard Raspberry Pi 4. To provide a comprehensive comparison, we also use the gathered data to train two network architectures (compact and attention) offline, both on a laptop and on the onboard Raspberry Pi 4. Furthermore, a separate learning flight is performed to train an ‘attention’ network onboard in real time. Following the training phase, all six resulting models are deployed to the drone for evaluation. The video showcases the homing performance tests, in which the drone is initialized at eight distinct starting positions along the perimeter with random initial headings. A homing attempt is classified as successful if the drone navigates back to the central home location. For brevity, this demonstration highlights the performance of the six models from two representative starting locations. As the test space is limited, the entire arena serves as the LHA, focusing this experiment exclusively on the visual learning and precision homing capabilities of the system. Visual learning and full-flight indoor tests. This video demonstrates the complete, multistage flight pipeline of Bee-Nav in a large indoor hangar (30 × 40 m), a GPS-denied environment. The experiment begins with the drone performing a learning flight to establish a 10 × 10-m LHA. Following offboard training and deployment of the neural network, the drone executes five consecutive trials. Each trial consists of a preplanned outbound flight, a direct inbound return to the estimated home position using onboard odometry and the final visual homing phase guided by the neural network. The video presents a multipanel view during the homing phase, showing the flight trajectory plot alongside third-person and onboard camera views. Visual learning and outdoor flight test under windy conditions. This video demonstrates the performance of Bee-Nav in a challenging outdoor test field with substantial wind (5–10 m s−1). The experiment begins with the drone performing a learning flight to establish a 15 × 15-m LHA. After the network is trained and deployed, the drone executes a long-distance, 120-m preplanned outbound flight. On completion, it performs an inbound return flight using onboard odometry, followed by the final visual homing phase to reach the starting location. The video includes a real-time plot comparing the GPS ground truth with the onboard odometry of the drone, visually demonstrating the notable drift that the visual homing system successfully overcomes. Visual learning and long-distance (600-m) outdoor flight test. This video demonstrates the performance of Bee-Nav over a long-distance trajectory in an open outdoor test field. The experiment begins with the drone performing a learning flight to establish a 15 × 15-m LHA. After the network is trained and deployed, the drone executes a 500-m (odometry distance) preplanned outbound flight. On completion, it performs an inbound return using onboard odometry, followed by the final visual homing phase to reach the starting location. The video includes a real-time plot comparing the GPS ground truth (that shows the actual outbound distance of more than 600 m) with the onboard odometry of the drone, visually demonstrating the notable drift that accumulates over long distances, which the visual homing system must successfully overcome. Visual learning and homing in CyberZoo with obstacles inside. This video demonstrates the experimental procedure for the visual learning and homing components of the Bee-Nav system within a controlled indoor environment (10 × 10 m, CyberZoo) that has been augmented with static obstacles. The experiment begins with a learning flight, in which the drone autonomously collects training images while actively navigating around obstacles. Following this flight, a compact neural network is trained offline on a laptop and the resulting model is deployed to the drone. The video then showcases the homing evaluation, in which the drone is initialized at eight distinct starting positions with random initial headings. During homing, the drone uses the output of the network to navigate towards the centre in discrete steps; however, whenever an obstacle is detected in the intended path, the obstacle-avoidance logic overrides the navigation command to ensure safety. A homing attempt is classified as successful if the drone navigates back to the central home location. Given the limited test space, the entire arena serves as the LHA, focusing this experiment exclusively on the system’s visual learning and precision homing capabilities in the presence of obstacles. Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/. Reprints and permissions Ou, D., Hagenaars, J.J., Jankowski, M.R. et al. Efficient robot navigation inspired by honeybee learning flights. Nature (2026). https://doi.org/10.1038/s41586-026-10461-3 Download citation Received: 18 August 2025 Accepted: 30 March 2026 Published: 13 May 2026 Version of record: 13 May 2026 DOI: https://doi.org/10.1038/s41586-026-10461-3 Anyone you share the following link with will be able to read this content: Sorry, a shareable link is not currently available for this article. Provided by the Springer Nature SharedIt content-sharing initiative Advertisement Nature (Nature) ISSN 1476-4687 (online) ISSN 0028-0836 (print) © 2026 Springer Nature Limited Sign up for the Nature Briefing newsletter — what matters in science, free to your inbox daily.
Images (10): 



|
|||||
| Hong Kong pins focus on life sciences, embodied intelligence in … | http://www.ecns.cn/china/2026-05-13/det… | 10 | May 14, 2026 00:00 | active | |
Hong Kong pins focus on life sciences, embodied intelligence in AI pushURL: http://www.ecns.cn/china/2026-05-13/detail-ihfenirv8001478.shtml Content:
Hong Kong will establish a committee on AI+ and industry development strategy to formulate strategies for driving industrial transformation through AI, with initial focus on life and health technology and embodied intelligence, John Lee, chief executive of the Hong Kong Special Administrative Region (HKSAR), said on Tuesday. Addressing the first Hong Kong embodied AI industry summit, Lee highlighted the role of embodied AI in promoting industrial upgrading and fostering new quality productive forces, adding that Hong Kong welcomes enterprises to set up operations here to leverage the city's strengths and accelerate technological upgrading. Lee said that the Hong Kong Artificial Intelligence Research and Development Institute is set to commence operations in the second half of the year, with the aim of boosting AI research and development, facilitating the commercialization of research outcomes, and expanding real-world application scenarios. The institute will launch an AI technology matching platform, providing industry demand with solutions to speed up commercialization and empower industrial development, Lee added. Also speaking at the summit, Frederick Ma, chairman of the Hong Kong Trade Development Council, stressed that Hong Kong boasts unique strengths of internal integration and external connectivity as well as openness and inclusiveness, making it an optimal platform for mainland innovation and tech enterprises to expand into global markets. The summit, co-hosted by the Hong Kong China Friendship Association and robotics firm AGIBOT, aims to forge a platform for exchanges and cooperation for Hong Kong's embodied AI sector, as well as build the city into a global hub for embodied AI. 2026 World Digital Education Conference: how AI drives educational transformation International Healthcare Week opens in Hong Kong, fueling healthcare breakthroughs
Images (10): 




|
|||||
| SoftBank targets $100B IPO for AI robotics venture Roze (SFTBY:OTCMKTS) | https://seekingalpha.com/news/4582464-s… | 0 | May 13, 2026 08:00 | active | |
SoftBank targets $100B IPO for AI robotics venture Roze (SFTBY:OTCMKTS)URL: https://seekingalpha.com/news/4582464-softbank-targets-100b-ipo-for-ai-robotics-venture-roze Description: SoftBank plans Roze, an AI robotics firm to automate data center construction, eyeing a $100B U.S. IPO. Content: |
|||||
| SoftBank eyes listing new AI and robotics firm Roze in … | https://www.cnbc.com/2026/04/30/softban… | 10 | May 13, 2026 08:00 | active | |
SoftBank eyes listing new AI and robotics firm Roze in the U.S., FT reportsURL: https://www.cnbc.com/2026/04/30/softbank-roze-ai-robotics-ipo-100-billion-ft-report.html Description: SoftBank Group is planning to create and list a standalone artificial intelligence and robotics company, coined "Roze" in the U.S. Content:
SoftBank Group is planning to create and list a standalone artificial intelligence and robotics company in the U.S. as early as this year, the Financial Times reported on Thursday. The new entity, to be called "Roze," will focus on building data centers and using robotics to improve the efficiency of AI infrastructure construction, according to the report, which cited anonymous sources familiar with the matter. SoftBank founder and Chief Executive Masayoshi Son is driving the effort, with executives reportedly targeting a valuation of about $100 billion and aiming to pursue the initial public offering this year. However, the report noted that the valuation target and timeline could shift and that the plans are considered ambitious by some SoftBank executives, in part due to uncertainties stemming from the conflict in the Middle East. Son's AI risk appetite has been growing in recent years, with tens of billions of dollars committed to the sector. Investors, however, have raised concerns about how SoftBank will fund those investments, particularly its backing of OpenAI, which remains unprofitable. The proposed listing could help offset some of the major pledges, including more than $30 billion committed to OpenAI. Roze could also reportedly bundle existing energy, land and infrastructure assets from SoftBank's portfolio, as well as ABB Robotics, which SoftBank agreed to buy last year. ABB Robotics is one of the world's leading suppliers of robotics and machine automation solutions, and SoftBank is expected to integrate its robotics hardware with AI capabilities. SoftBank representatives did not immediately respond to a request for comment from CNBC. Son's AI ambitions have increasingly centered on the U.S., with the firm already positioning itself as a major financier of American AI infrastructure. At the start of last year, SoftBank partnered with OpenAI, Oracle and others on the Stargate project, a planned $500 billion investment to build AI data center capacity across the country. The conglomerate has also been working quickly to build its own data centers, including a large-scale project in Ohio. SoftBank posted a $2.4 billion gain in its Vision Fund in the December quarter as gains tied to its OpenAI investment helped offset losses in some of its other bets. The firm was trading 0.9% lower on Thursday and is up more than 18% this year. Got a confidential news tip? We want to hear from you. Sign up for free newsletters and get more CNBC delivered to your inbox Get this delivered to your inbox, and more info about our products and services. © 2026 Versant Media, LLC. All Rights Reserved. A Versant Media Company. Data is a real-time snapshot *Data is delayed at least 15 minutes. Global Business and Financial News, Stock Quotes, and Market Data and Analysis. Data also provided by
Images (10): 


|
|||||
| SoftBank Maps Out $100 Billion Robotics Spinoff | https://finance.yahoo.com/sectors/techn… | 2 | May 13, 2026 08:00 | active | |
SoftBank Maps Out $100 Billion Robotics SpinoffDescription: Softbank is planning to bundle a bouquet of existing bets together into a new venture at the intersection of AI and robotics. Content:
Oops, something went wrong Concerned about an AI bubble? Sign up for The Daily Upside for smart and actionable market news, built for investors. Every rose has its thorn, and SoftBank’s unwieldy portfolio of AI investments is starting to feel a bit prickly. Masayoshi Son’s solution? Bundle a bouquet of existing SoftBank bets together into a new venture that exists at the intersection of AI and robotics, name it Roze AI, and take it public sometime in the next seven to 19 months, according to a Financial Times report last week. Sign up for The Daily Upside at no cost for premium analysis on all your favorite stocks. READ ALSO: Forget Eggs. Tomato Prices Swell as Inflation Hits Three-Year High and Is Boeing’s Massive China Order Finally Close to Landing? Just about everyone in the AI world sees so-called “physical AI” as the next great frontier; at the Consumer Electronics Show earlier this year, Nvidia CEO Jensen Huang famously declared that robots were about to have their “ChatGPT moment.” For SoftBank, Roze AI would represent a critical move to both catch the next AI wave and reduce exposure to the data center infrastructure and frontier model-making it has thus far invested in heavily. Per the FT, key SoftBank lieutenants are growing wary of the company’s costly alliance with OpenAI, with the tens of billions of dollars the group has invested and loaned to the firm potentially weighing on its balance sheet. Launching Roze, at a valuation as high as $100 billion, might help ease some of the financial burden. The timing could be critical: To fund its AI investments, and bets on OpenAI in particular, SoftBank last month signed a $40 billion bridge loan, its largest-ever lending facility denominated solely in dollars, per Bloomberg. Meanwhile, The Wall Street Journal reported last week that SoftBank has considered selling its Intel stake to fund its investments; last year, it sold its $5.8 billion stake in Nvidia. Roze would feature many of SoftBank’s existing energy, land and infrastructure investments, sources told the WSJ, and would invest in the creation of robots that could, in turn, help with the massive buildout of data centers. Slice of Life: Yes, that’s robots running AI models created in data centers being used to build more data centers to train more AI models to … well, you get it. Historically, SoftBank’s interest in robots has ebbed and flowed. An early attempt to build a robot dubbed Pepper was canned in 2021, while Zume Pizza, the robot-operated pizzeria startup it backed, shuttered in 2023. But last year, the company agreed to buy ABB’s robotics business, which builds bots for industrial settings, for $5.4 billion; sources told the FT that once the deal closes, ABB could be a centerpiece for Roze. This post first appeared on The Daily Upside. To receive razor sharp analysis and perspective on all things finance, economics, and markets, subscribe to our free The Daily Upside newsletter. Sign in to access your portfolio
Images (2): 
|
|||||
| PYMNTS | SoftBank Planning $100 Billion US Robotics and AI … | https://www.pymnts.com/technology/2026/… | 7 | May 13, 2026 08:00 | active | |
PYMNTS | SoftBank Planning $100 Billion US Robotics and AI CompanyURL: https://www.pymnts.com/technology/2026/softbank-planning-100-billion-us-robotics-and-ai-company/ Content:
Japanese conglomerate SoftBank reportedly plans to create an American artificial intelligence (AI) and robotics company. Complete the form to unlock this article and enjoy unlimited free access to all PYMNTS content — no additional logins required. yesSubscribe to our daily newsletter, PYMNTS Today. By completing this form, you agree to receive marketing communications from PYMNTS and to the sharing of your information with our sponsor, if applicable, in accordance with our Privacy Policy and Terms and Conditions. Δ That’s according to a report Thursday (April 30) from the Financial Times (FT), which characterizes the venture, known as Roze, as part of SoftBank founder and CEO Masayoshi Son’s push to make his AI ambitions a reality. Roze could go public as early as this year, with SoftBank executives targeting a valuation that could reach $100 billion, the report added, citing sources familiar with the matter. These sources say Son wants to list this year to offset the multi-billion dollar funding pledges the company has made, including large commitments to OpenAI. Reached by PYMNTS, SoftBank declined to comment. SoftBank plans to hold an analyst day in a data center facility in Texas in July to promote the initial public offering (IPO), according to the same sources. Advertisement: Scroll to Continue However, the FT added, there are some within SoftBank who are doubtful about the valuation and the timeline for the listing, partly because of geopolitical and economic upheaval amid the U.S war on Iran. At the same time, U.S. markets could soon have to find space for three historically large IPOs, the report added: those of SpaceX, Anthropic and OpenAI. In related news, PYMNTS wrote recently about rising investor attention to physical AI and vertical AI startups, with venture funding focusing on firms building systems designed to operate in the physical world or automate specialized industry workflows. “The trend reflects a shift in the AI startup landscape away from general-purpose tools toward systems that can perform defined tasks in sectors such as robotics, healthcare, logistics and enterprise software,” that report said. Interest in physical AI has picked up amid debate about the role robotics could play in advancing artificial intelligence. Tesla CEO Elon Musk has argued that humanoid robots could chart a potential pathway toward artificial general intelligence, suggesting that machines that can interact with the physical world may accelerate progress in autonomy and reasoning. “While the claim remains speculative, funding patterns suggest investors are betting that AI systems connected to real-world environments could become a major frontier of innovation,” PYMNTS added. Meanwhile, another FT report from earlier this month said that nearly 40% of U.S. data center projects are in danger of falling behind schedule. The report, citing data from satellite and AI analytics group SynMax, said that 60% of projects scheduled for next year have not yet started construction. Industry executives interviewed by the FT said delays are due to problems related to permitting and local opposition, as well as labor, power and equipment shortages. SoftBank Planning $100 Billion US Robotics and AI Company Federal Paper Checks Face Stricter Limits Under Treasury Plan Amazon Tightens Grip on Seller Cash With Card Payment Overhaul Meta's Business AI Handling 10 Million Weekly Conversations Get PYMNTS Today, AI, B2B and more. We’re always on the lookout for opportunities to partner with innovators and disruptors.
Images (7): 


|
|||||