AUTOMATION HISTORY
1191
Total Articles Scraped
2288
Total Images Extracted
Scraped Articles
New Automation| Action | Title | URL | Images | Scraped At | Status |
|---|---|---|---|---|---|
| Boston Dynamics’ Atlas Robot Becomes Market-Ready Product | https://www.techjuice.pk/boston-dynamic… | 1 | Feb 02, 2026 16:01 | active | |
Boston Dynamics’ Atlas Robot Becomes Market-Ready ProductURL: https://www.techjuice.pk/boston-dynamics-atlas-robot-becomes-market-ready-product/ Description: Boston Dynamics’ Atlas humanoid robot is now ready with industrial deployment plans and first units headed to Hyundai and Google DeepMind. Content:
Boston Dynamics has transitioned its advanced Atlas humanoid robot from prototype to a market-ready product, unveiling production-focused specifications and industrial deployment plans after its presentation at CES 2026, the company confirmed. Official statements from Boston Dynamics detail that the newest version of Atlas was engineered with consistency, dependability, and readiness for real-world environments in mind, marking a departure from earlier iterations that were largely focused on demonstrations and capability showcases. The production variant features robust operational capacity designed to work across a range of industrial settings, including warehouses and factories with structured tasks such as parts sequencing and material handling. “For more than 30 years, Boston Dynamics has been building some of the world’s most advanced robots,” said Robert Playter, CEO of Boston Dynamics. “This is the best robot we have ever built. Atlas is going to revolutionize the way industry works, and it marks the first step toward a long-term goal we have dreamed about since we were children–useful robots that can walk into our homes and help make our lives safer, more productive, and more fulfilling.” Boston Dynamics, majority-owned by Hyundai, has announced that it will deliver the first production units of Atlas to Hyundai and to its artificial intelligence collaborator, Google DeepMind. In both deployments, teams will integrate the robot’s capabilities with advanced AI systems to enhance perception, adaptability, and autonomous decision-making in real-world operations. The market-ready Atlas features hardware that supports payloads of up to approximately 50 kilograms and operates reliably across challenging temperatures and environments to meet demanding industrial requirements. Engineers designed Atlas’s reach and mobility to handle a wide range of tasks, while allowing flexible supervision models ranging from full autonomy to remote operation through teleoperation or tablet-based control interfaces. According to the official statement: The robot can be controlled in three different ways: autonomous mode, teleoperated, or by using a tablet steering interface. Atlas has 56 degrees of freedom, fully rotational joints, a reach extending to 2.3M (7.5 ft), and the strength to lift up to 50 kg (110 lbs). The robot is also extremely water-resistant and can operate at diverse temperature ranges from -20° to 40° C (-4° to 104° F). Its safety features include human detection and fenceless guarding, and it can be integrated into workflows using barcode scanners or RFID. Production plans include a phased rollout beginning in 2028 at Hyundai’s manufacturing facilities, with initial use cases focused on parts sequencing and material logistics. By 2030, project leaders anticipate expanding Atlas’s role to more complex assembly operations. Boston Dynamics’ commercialization of Atlas underscores the growing emphasis on industrial robotics as a strategic tool to enhance operational efficiency and complement human labor in structured production environments. Stakeholders in manufacturing and logistics sectors will be watching how Atlas’s market entry influences broader adoption of humanoid robotics across global supply chains. Abdul Wasay explores emerging trends across AI, cybersecurity, startups and social media platforms in a way anyone can easily follow. A wave of grassroots ingenuity in the PC VR community has produced a new DIY virtual reality headset capable of running SteamVR experiences using commonly. US power tool manufacturer DEWALT has introduced a downward-drilling robot designed to automate one of the most labor-intensive steps in data center construction. A breakthrough. Pakistan’s National Cyber Crime Investigation Agency (NCCIA) has registered a First Information Report (FIR) in a disturbing case of online child exploitation, accusing a Rawalpindi. India has announced a massive incentive for the tech sector. Foreign companies using local data centres to serve global clients will now enjoy a tax. Premier Pakistan technology news website with special focus on startups, entrepreneurship and consumer products. © 2025 TechJuice.PK – All rights reserved.
Images (1): 
|
|||||
| Hyundai and Boston Dynamics unveil humanoid robot Atlas at CES | https://www.ocregister.com/2026/01/05/c… | 1 | Feb 02, 2026 16:01 | active | |
Hyundai and Boston Dynamics unveil humanoid robot Atlas at CESURL: https://www.ocregister.com/2026/01/05/ces-2026-humanoid-robots/ Description: The life-sized robot walked and waved to the crowd, marking a significant step in the competition to build human-like robots. Content:
e-Edition Get the latest news delivered daily! Get the latest news delivered daily! e-Edition Trending: By MATT O’BRIEN Hyundai-owned Boston Dynamics publicly demonstrated its humanoid robot Atlas for the first time Monday at the CES tech showcase, ratcheting up a competition with Tesla and other rivals to build robots that look like people and do things that people do. “For the first time ever in public, please welcome Atlas to the stage,” said Boston Dynamics’ Zachary Jackowski as a life-sized robot with two arms and two legs picked itself up from the floor at a Las Vegas hotel ballroom. It then fluidly walked around the stage for several minutes, sometimes waving to the crowd and swiveling its head like an owl. An engineer remotely piloted the robot from nearby for the purpose of the demonstration, though in real life Atlas will move around on its own, said Jackowski, the company’s general manager for humanoid robots. The company said a product version of the robot that will help assemble cars is already in production and will be deployed by 2028 at Hyundai’s electric vehicle manufacturing facility near Savannah, Georgia. The South Korean carmaker holds a controlling stake in Massachusetts-based Boston Dynamics, which has been developing robots for decades and is best known for its first commercial product: the dog-like robot called Spot. A group of four-legged Spot robots opened Hyundai’s event Monday by dancing in synchrony to a K-pop song. Hyundai also announced a new partnership with Google’s DeepMind, which will supply its artificial intelligence technology to Boston Dynamics robots. It’s a return to a familiar partnership for Google, which bought Boston Dynamics in 2013 before selling it to Japanese tech giant SoftBank several years later. Hyundai acquired it from SoftBank in 2021. It’s rare for leading robot makers to publicly demonstrate their humanoids, in part because fumbles attract unwanted attention — such as when one of Russia’s first humanoids fell on its face in November. Robotics startups typically prefer to show off their research prototypes in videos on social media, offering them the opportunity to show the machines at their best and edit out their failings. At the end of Monday’s live Atlas demonstration, which appeared flawless, the humanoid prototype swung its arms in a theatrical gesture to introduce a static model of the new product version of Atlas, which looked slightly different and was blue in color. Crossover excitement from the commercial AI boom and new technical advances have helped pour huge amounts of money into robotics development, though many experts still think it’s a long time before truly human-like robots that can perform many different tasks take root in workplaces or homes. “I think the question comes back to what are the use cases and where is the applicability of the technology,” said Alex Panas, a partner at consultancy McKinsey who helped lead a CES robotics panel that attracted hundreds of people earlier in the day. “In some cases, it may look more humanoid. In some cases, it may not.” Either way, Panas said, “the software, the chipsets, the communication, all the other pieces of the technology are coming together, and they will create new applications.” Humanoids don’t yet have enough dexterity to threaten many human jobs, though a debate over their effects on employment is likely to grow as they become more skilled. The same Georgia plant where Hyundai plans to test out Atlas was the site of a federal immigration raid last year that led to the arrests of hundreds of workers, including more than 300 South Korean citizens. Copyright © 2026 MediaNews Group
Images (1): 
|
|||||
| Boston Dynamics video: Atlas robot carries tool bag | https://www.bostonglobe.com/2023/01/19/… | 0 | Feb 02, 2026 16:01 | active | |
Boston Dynamics video: Atlas robot carries tool bagDescription: In a sleek new video, Boston Dynamics seems to be hinting at a future for its high-tech robots: putting them to work in settings where heavy labor is required. Content: |
|||||
| CES 2026: Boston Dynamics Atlas humanoid robot has an AI … | https://thegadgetflow.com/blog/ces-2026… | 1 | Feb 02, 2026 16:01 | active | |
CES 2026: Boston Dynamics Atlas humanoid robot has an AI brainURL: https://thegadgetflow.com/blog/ces-2026-boston-dynamics-atlas-humanoid-robot/ Description: Boston Dynamics brings Atlas to CES 2026, showing how humanoid robots are evolving with fluid movement and advanced AI control. Content:
Author If CES 2026 proves anything, it’s that AI is moving off our devices and into the physical world. A case in point is the Boston Dynamics Atlas humanoid robot. First unveiled in 2021, the original Atlas was heavy with slow, clunky movements. Fast-forward to 2026, and you’ll find that Atlas can dance, cartwheel, and even stand up in a way that no human can. What’s responsible for the change? Tireless engineering at Boston Dynamics has painstakingly constructed every centimeter of this humanoid robot. Plus, Atlas has an AI brain. Atlas may be labeled a humanoid, but it doesn’t try to move like one. Instead of copying human motion, it doubles down on what machines do best. So its limbs, torso, and head can rotate far beyond human limits. This allows it to reposition itself without turning its entire body. Atlas can pivot its core, twist mid-motion, and recover from falls using movements that would be impossible—or painful—for a person. That freedom of motion isn’t just for show. By eliminating traditional wiring that crosses rotating joints, Boston Dynamics has made Atlas both more flexible and more reliable over time. Fewer physical constraints mean smoother motion and fewer failure points. The latest Atlas is fully electric, ditching older hydraulic systems in favor of faster, quieter, and more precise control. A custom battery and advanced actuators give it the power to jump, lift, and stabilize itself. Meanwhile, a lightweight mix of aluminum and titanium components keeps the robot strong yet sleek. The result is a machine that looks less like a prototype and more like a platform; one capable of real-world movement rather than controlled lab demos. What really sets Atlas apart is how tightly perception and movement are linked. The robot constantly evaluates its surroundings and adjusts its posture, balance, and grip in real time. This is what allows Atlas to squat deeply to lift objects, shift weight mid-step, or recover smoothly when something goes wrong. Its hands reflect the same philosophy. Atlas doesn’t have human-like fingers, but instead, three-digit hands that can reconfigure as needed. Yes, Atlas can switch between narrow grips for small objects and wider grasps for larger loads. Tactile sensors feed data back into the system, helping Atlas apply the right amount of force instead of crushing or dropping what it’s holding. Most crucial to Atlas’ upgrades is its AI brain, which is powered by Nvidia chips. These allow the robot to lean new tasks via human-guided input. Using teleoperation, human operators can demonstrate tasks to Atlas remotely, repeating motions until the robot performs them independently. It’s a practical way to teach machines how to interact with unpredictable environments; something pre-programmed motions have always struggled with. There’s no shortage of hype around humanoid robots right now, and Boston Dynamics isn’t pretending Atlas is ready to flood factories or homes. Building machines that are reliable, affordable, and safe is a time-consuming endeavor. But at CES 2026, Atlas makes one thing clear: AI isn’t confined to computers and cell phones anymore. It’s learning how to move and exist in the real world. That’s a shift that’s closer than it was just a few years ago. Author The original product discovery platform We use cookies to personalize your experience. Learn more here.
Images (1): 
|
|||||
| Nauka i technologia - Przerażający humanoidalny robot Boston Dynamics pracuje … | https://www.prisonplanet.pl/nauka_i_tec… | 1 | Feb 02, 2026 16:01 | active | |
Nauka i technologia - Przerażający humanoidalny robot Boston Dynamics pracuje na rusztowaniach. - Prison PlanetURL: https://www.prisonplanet.pl/nauka_i_technologia/przerazajacy,p897174322 Content:
Najnowszy film firmy Boston Dynamics przedstawiający Atlasa - wysokiego na sześć stóp dwunożnego humanoida, pokazuje, że robot nabył nowe umiejętności, które umożliwiają mu operowanie w złożonym terenie. Zespół Atlas firmy Boston Dynamics, kierowany przez Scotta Kuindersmę, powiedział gazecie The Verge, że wideo ma „pokazywać rozszerzenie badań, które prowadzimy w Atlasie”. Film pokazuje autonomiczną pracę Atlasa na prowizorycznym placu budowy. Pracownik stojący wysoko na rusztowaniu prosi dwunożnego robota o torbę z narzędziami. Robot chwyta torbę i pomyślnie dostarcza ją pracownikowi. Pierwotny film agencji wojskowej DARPA: „Nie myślimy tylko o tym, jak sprawić, by robot poruszał się dynamicznie w swoim otoczeniu, tak jak zrobiliśmy to w Parkour i Dance. Teraz zaczynamy angażować Atlasa w prace i zastanawiać się, w jaki sposób robot powinien postrzegać obiekty w swoim otoczeniu i nimi manipulować” powiedział Kuindersma. Odkąd w 2021 roku Hyundai Motor Group nabył za 1,1 miliarda dolarów pakiet kontrolny, w Boston Dynamics nastąpiła znacząca zmiana w przekazach, które wydają się przybliżać komercjalizację tych dwunogich robotów do rzeczywistych zastosowań. Więcej na temat rozwoju tych technologii w zakładce "Przyszłość pojazdów bezzałogowych": To co nas martwi to fakt, iż Atlas jest w stanie zrealizować marzenie kompleksu wojskowo-przemysłowego o humanoidalnych żołnierzach. Link do oryginalnego artykułu: LINK | Armia USA wprowadza roboty rozminowujące plaże przed desantem. | Korea oracowała wojskowego robota do eksploracji tuneli. | DARPA testuje autonomiczne helikoptery Sikorski. | Autonomiczny rój dronów przelatuje przez las polując na ludzi. | Turcja rozmieści wojskowe drony z karabinami maszynowymi. | Wojskowe drony będą rozpylały zakażone komary? | Axon chce, aby „drony wyposażone w paralizatory” patrolowały szkoły. | Roje zabójczych dronów są już sterowane sztuczną inteligencją. | A teraz na czworonożne roboty montują broń. | Armia amerykańska może wkrótce mieć bronie mikrofalowe do niszczenia rojów dronów. | Dron Kamikaze AI „ścigał” i zabijał ludzkie cele. | Cyfrowa kolonizacja: od teleobecności do pełnej sztucznej inteligencji. | MAV: Szpiegowskie drony-insekty. | „Digit” - humanoidalny robot dostarczający przesyłki kurierskie. | Armia rozwija nowe technologie dla robotów. | Singapur wdraża kolejne roboty w celu egzekwowania dystansu społecznego. | Rząd w Singapurze wykorzystuje epidemie do wdrożenia robotów kontrolujących zachowania obywateli. | Policja w USA zaczęła aktywnie wykorzystywać roboty do akcji policyjnych. | Robot policjant zatrzymuje kierowców. | 165-funtowy humanoidalny robot korzysta z algorytmów kontroli, percepcji i planowania. | USA wdraża czołgi sterowane sztuczną inteligencją. | USA wdraża flotę autonomicznych łodzi podwodnych. | Wkrótce grupy robotów będą jeździć autonomicznymi furgonetkami i dostarczać paczki kurierskie. | Nowe roboty biegają jak ludzie. | Nowy film z Boston Dynamics pokazuje robota przeskakującego przeszkody. | Roboty z mobilnym in-vitro. | TECH. Krytyka rozwoju środowiska technologicznego. Prezentacja. | Znikające zawody do roku 2030. 50% zawodów ulegnie komputeryzacji. | Na każdego wprowadzanego na rynek pracy robota zostaje wyeliminowanych sześć miejsc pracy dla ludzi. | Bill Gates: Ludzie nie zdają sobie sprawy, ile miejsc pracy zostanie wkrótce zastąpionych przez boty. | Dlaczego przyszłości nas nie potrzebuje. | Implikacje zmian demograficznych do roku 2050. | Miliarderzy biorą populację na celownik. | Telemarketer robot, który zaprzecza, że jest robotem. | Czy Robo-Reporterzy zastąpią dziennikarzy głównego nurtu? | Sztuczny mózg przeszedł podstawowy test IQ. | Pierwsza bezzałogowa flota ciężarówek rusza w Australii. | Pentagon będzie budował roboty z "prawdziwym" mózgiem. | Armie wirtualnych przyjaciół promują propagandę poprzez sieci społecznościowe. | NBIC- zabawa w Boga. Obraz świata w 2025 roku. | Przyszłość pojazdów bezzałogowych. | ONZ przewiduje transhumanistyczną przyszłości, w której człowiek będzie zbędny. | Chip zapisujący wspomnienia pozwala na ich transfer do drugiego mózgu. | Interfejs mózg-maszyna staje się rzeczywistością. | MIT stworzyło glukozowe ogniwo paliwowe do zasilania wszczepianych interfejsów mózg-komputer. | Oni naprawdę chcą wszczepić czipy do twojego mózgu. | Naukowcy stworzyli system odczytywania obrazów ruchomych bezpośrednio z mózgu. | Technologie ulepszania ludzi i przyszłość pracy w najbliższej dekadzie. | PETMAN: kolejny potężny krok w kierunku budowy armii robotów DARPA. | Nowe drony i roboty. Przedsmak przyszłości. |
Images (1): 
|
|||||
| Atlas gotowy. Robot humanoidalny Boston Dynamics na CES 2026 - … | https://geekweek.interia.pl/technologia… | 1 | Feb 02, 2026 16:01 | active | |
Atlas gotowy. Robot humanoidalny Boston Dynamics na CES 2026 - GeekWeek w INTERIA.PLDescription: Atlas to robot humanoidalny, nad którym Boston Dynamics pracowało od lat. Podczas targów CES 2026 w Las Vegas firma zaprezentowała przedprodukcyjną wersję Content:
Dawid Długosz Atlas to robot humanoidalny, nad którym Boston Dynamics pracowało od lat. Podczas targów CES 2026 w Las Vegas firma zaprezentowała przedprodukcyjną wersję maszyny. Wkrótce ruszy jej produkcja. Robot Atlas w pierwszej kolejności trafi do fabryk Hyundai oraz Google DeepMind, gdzie ma pracować autonomicznie. Roboty humanoidalne zyskują na popularności i rok 2026 może należeć do nich. Boston Dynamics ogłosiło, że po latach prac buduje już ostateczną wersję maszyny Atlas, której możliwości mogliśmy oglądać na różnych filmach. Robot został sfinalizowany i wkrótce rozpocznie się jego masowa produkcja. Boston Dynamics ogłosiło informację w trakcie targów elektroniki CES 2026, które w tym tygodniu odbywają się w Las Vegas. Roboty humanoidalne odgrywają dużą rolę w prezentacjach różnych firm i zostały tam przywiezione przez różne marki. Przykładem może być model do domu o nazwie CLOiD opracowany przez LG. Podczas targów CES 2026 Boston Dynamics pochwaliło się przedprodukcyjną wersją robota Atlas. Obecnie budowana jest ostateczna edycja maszyny i wkrótce rozpocznie się jej produkcja. Kto znalazł się w gronie pierwszych klientów? W pierwszej kolejności Atlas zostanie wdrożony przez firmę Hyundai, która jest większościowym udziałowcem Boston Dynamics. Następnie mamy Google DeepMind, które zostało pozyskane w ramach partnerstwa z zakresu AI. Atlas to projekt robota, którego historia sięga 2011 r. Wtedy został on po raz pierwszy zaprezentowany w ramach DARPA. Od tego czasu Boston Dynamics wprowadziło mnóstwo zmian oraz ulepszeń, które zaowocowały produkcyjną wersją maszyny. Atlas to robot humanoidalny, który z wyglądu przypomina człowieka. Maszyna ma mechaniczne ręce, które pozwalają jej sięgać na wysokość do 2,3 metra oraz unieść ładunek ważący do 50 kilogramów. Ponadto jest w stanie pracować w warunkach z temperaturą od -4 do +40 stopni Celsjusza. Hyundai planuje wprowadzić roboty Atlas do własnych fabryk w 2028 r. Najpierw w roli maszyny sortującej części samochodowe. Dwa lata później roboty będą wdrażane na liniach produkcyjnych w ramach montażu komponentów.
Images (1): 
|
|||||
| Boston Dynamics revela novo robot Atlas | https://www.pelaestradafora.com/2026/01… | 1 | Feb 02, 2026 16:01 | active | |
Boston Dynamics revela novo robot AtlasURL: https://www.pelaestradafora.com/2026/01/boston-dynamics-revela-novo-robot-atlas/ Description: A Boston Dynamics inicia 2026 revelando a mais recente geração do seu robot humanóide Atlas. O Atlas da Boston Dynamics - agora pertencente à Hyundai - tem sido referência frequente na área dos robots humanóides. No entanto, no último ano perdeu terreno face às inúmeras empresas concorrentes no sec Content:
A Boston Dynamics inicia 2026 revelando a mais recente geração do seu robot humanóide Atlas. O Atlas da Boston Dynamics – agora pertencente à Hyundai – tem sido referência frequente na área dos robots humanóides. No entanto, no último ano perdeu terreno face às inúmeras empresas concorrentes no sector, que regularmente iam demonstrando avanços impressionantes. Mas a empresa não tem estado parada, e revelou agora a mais recente geração do Atlas, na variante que diz estar pronta para ser produzida e comercializada em larga escala. O novo Atlas é totalmente eléctrico e sofreu vários ajustes que o tornam menos parecido com um robot “à Hollywood” e mais aproximado de uma máquina de trabalho efectivo. Esquerda: primeiro protótipo do Atlas eléctrico / Direita: versão mais recente do Atlas Este Atlas mede 1.88 m de altura e pesa 90 kg, tem 56 eixos de movimento, tem uma autonomia de 4 horas (podendo ele próprio trocar a sua própria bateria), e pode levantar cargar de até 50 kg e alcançar objectos a uma altura de 2.3 m. A Boston Dynamics diz que está apto para trabalhar em todo o tipo de ambientes, com temperaturas de -20° a 40° C, e que é “extremamente resistente à água”. Em vez de se limitar a replicar os movimentos humanos, o Atlas tira partido das suas capacidades sobre-humanas, podendo fazer rotações sobre si mesmo, acelerando uma série de movimentos face ao que seria habitual. Conta também com um complexo sistema de segurança, para avaliar continuamente tudo o que está em seu redor e ajustar o comportamento, incluindo a capacidade de reconhecer pessoas por perto. Se para o hardware a Boston Dynamics está a usar chips da Nvidia, para a parte do software a Boston Dynamics revelou ter feito uma parceria com a Google Deepmind, para tirar partido do seu vasto conhecimento e avanços na área da Inteligência Artificial – algo que pode explicar também porque motivo a Google não se aventurou a lançar uma nova divisão dedicada a esta área. Boston Dynamics’ Atlas robot is undergoing field testing at Hyundai’s factory near Savannah, Georgia. Atlas is autonomously working in the parts warehouse, sorting components for the assembly line without human assistance.@mario_bollini The Atlas product lead stated that BD… https://t.co/9vh9aeghqY pic.twitter.com/f8babr4vuu — CyberRobo (@CyberRobooo) January 5, 2026 Mais importante, este Atlas está apto para começar a trabalhar. A Hyundai tem estado a testá-lo numa das suas fábricas, assistindo na linha de produção, e diz que irá aumentar sustancialmente o número de robots a trabalhar ao longo dos próximos anos (com o objectivo de conseguir produzir 30 mil robots por ano em 2028). Pelo que, parece que fica oficialmente dado o tiro de partida para o uso de robots humanóides nas fábricas; e se as previsões se materializarem, o problema não será saber como ou quando este robots chegarão, mas sim ficar-se limitado a que isso seja feito à velocidade com que se conseguirem produzir estes robots. O seu endereço de email não será publicado. Campos obrigatórios marcados com * Comentário * Nome * Email * Site Δ
Images (1): 
|
|||||
| Boston Dynamics Unveils First Commercial Atlas Humanoid Robot - Decrypt | https://decrypt.co/354048/boston-dynami… | 1 | Feb 02, 2026 16:01 | active | |
Boston Dynamics Unveils First Commercial Atlas Humanoid Robot - DecryptURL: https://decrypt.co/354048/boston-dynamics-unveils-first-commercial-atlas-humanoid-robot Description: Boston Dynamics said manufacturing on its humanoid Atlas robots will begin immediately, with all 2026 deployments already reserved. Content:
Boston Dynamics Unveils First Commercial Atlas Humanoid Robot $78,761.00 $2,370.40 $776.74 $1.64 $0.999731 $104.91 $0.283811 $2,369.14 $0.109446 $1.02 $52.00 $0.301021 $540.22 $2,907.03 $78,525.00 $0.999791 $0.999138 $2,578.31 $8.51 $2,574.87 $32.37 $408.42 $9.93 $0.182795 $0.998757 $78,752.00 $0.182734 $2,370.54 $300.91 $1.00 $60.91 $1.15 $10.25 $0.999358 $1.085 $0.00000699 $0.095579 $1.22 $0.1333 $1.00 $1.38 $4,644.25 $0.00972439 $0.081765 $1.57 $1.47 $3.97 $0.740558 $3.08 $4,680.24 $0.995147 $129.73 $201.36 $89.55 $0.00000434 $1.00 $1.11 $0.00000174 $1.23 $0.999448 $4.13 $2.80 $9.88 $1.15 $132.03 $0.00247884 $2,530.99 $0.062591 $2,371.76 $104.73 $0.57084 $0.287367 $0.160195 $0.999947 $0.998925 $0.999829 $9.44 $776.71 $0.110571 $0.02125273 $0.143793 $0.408715 $8.34 $5.92 $114.37 $69.75 $0.999143 $4.24 $1.29 $2,741.66 $1.99 $0.10613 $78,888.00 $0.03320678 $0.999695 $78,914.00 $0.999149 $0.01005036 $1.61 $10.98 $1.11 $0.818229 $0.1395 $1.085 $0.04830611 $0.999862 $0.03885561 $0.00862221 $32.65 $1.024 $1.10 $1.26 $114.15 $2,576.95 $1.23 $0.00000731 $2,503.69 $78,666.00 $0.999781 $0.193152 $0.080955 $79,592.00 $78,630.00 $0.99911 $0.01003723 $0.089142 $0.997295 $45.01 $1.093 $2,369.28 $2,521.02 $0.03047751 $2,536.92 $1.64 $1.57 $0.479506 $122.31 $0.999693 $0.01293313 $0.281456 $0.00794227 $0.998371 $1.41 $78,951.00 $0.04680357 $1.087 $2,371.57 $0.235108 $0.102551 $0.998134 $22.41 $0.188401 $0.28948 $0.647189 $1.18 $0.998064 $1.00 $2,369.56 $1.57 $1.13 $77,988.00 $0.110284 $3.73 $1.12 $0.04223981 $1.82 $0.400874 $0.429788 $150.98 $2,529.98 $79,028.00 $142.02 $0.504208 $0.00000035 $0.00003592 $0.297248 $0.01765114 $2,657.17 $0.057137 $19.33 $0.00000034 $0.377876 $0.0308266 $130.07 $2,558.48 $0.075007 $2,369.65 $15.72 $118.14 $0.99316 $0.052682 $0.999998 $0.150006 $0.00607709 $0.056916 $78,800.00 $0.316171 $0.05669 $78.37 $1.00 $0.692193 $0.999795 $1.69 $18.12 $0.00298463 $0.109388 $2.21 $0.103293 $0.00277705 $0.991785 $7.05 $0.148191 $1.61 $0.262093 $0.25808 $78,810.00 $0.03511252 $1.064 $0.02590356 $78,815.00 $1.047 $78,645.00 $12.78 $822.99 $3.28 $0.00489585 $21.20 $32.32 $2.36 $78,986.00 $0.999626 $0.105466 $0.226901 $0.00231249 $1.40 $0.999699 $0.223828 $0.115918 $0.999961 $5,794.91 $0.987442 $0.999907 $0.00000103 $0.999564 $0.00580768 $1.12 $2,369.45 $1.014 Boston Dynamics—whose YouTube videos of robots have both fascinated and terrified users for years—debuted a commercially deployable version of its Atlas humanoid robot at CES 2026 in Las Vegas, marking a shift from research demos to real-world use. The company said the launch followed more than a decade of research dating back to the first Atlas robot in 2013, alongside recent advances in artificial intelligence that made commercial deployment possible. “We’ve been working on humanoids for more than a decade at Boston Dynamics, always keeping a close watch on when the missing pieces of technology would fall into place to make it truly commercially viable,” Zachary Jackowski, VP and GM for humanoid robots at Boston Dynamics, said during the presentation. “The rapid advancements in AI over the past few years are the pieces that we needed. Now it’s time to officially take Atlas out of the lab.” Boston Dynamics said Atlas is designed for industrial jobs like material handling and order fulfillment, and built to move freely, grasp objects with its hands, and monitor its surroundings while working. According to the company, Atlas can lift up to 110 pounds and has a reach of roughly 7.5 feet. “This lets Atlas move even more efficiently than humans, particularly in manufacturing environments where every second counts,” he said. “We’ve also designed Atlas’s head and face very purposefully. We want folks working with Atlas to know that Atlas is a helpful robot, not a person,” adding that Atlas was not designed to move like a human. Boston Dynamics also revealed it’s working with Google DeepMind to expand what Atlas can do on the factory floor. Using DeepMind’s Gemini Robotics models in Atlas, Boston Dynamics aims to help it better perceive its surroundings, work through tasks, and operate more autonomously. “We developed our Gemini robotics models to bring AI into the physical world,” Google DeepMind Senior Director of Robotics Carolina Parada said in a statement. “We are excited to begin working with the Boston Dynamics team to explore what’s possible with their new Atlas robot as we develop new models to expand the impact of robotics, and to scale robots safely and efficiently.” Investment in humanoid robots has increased sharply in recent years as advances in AI and labor shortages push companies to test robots in real industrial settings, with firms including Tesla, Hyundai, and Nvidia expanding pilot programs and raising capital to move humanoids into manufacturing and logistics. A May 2025 Morgan Stanley report projects the humanoid robot market could surpass $5 trillion by 2050, with more than 1 billion humanoids in use, largely in industrial and commercial roles, primarily led by design advances in China, including the Unitree G1 humanoid robot. That momentum is reflected in Boston Dynamics’ Atlas program, which is closely tied to Hyundai Motor Group, which acquired an 80% controlling stake in the robotics company from SoftBank for $880 million in 2021. The company acknowledged the robot shown on stage was a prototype, guided by a human pilot. Still, Jackowski said Atlas is designed to operate autonomously in real-world settings and to stay on the job even as its battery runs down. “Atlas can perform these tasks at a reliable, consistent pace for about four hours using its dual swappable batteries,” Jackowski said. “And when they run low, Atlas navigates back to its charging station and swaps its own batteries, before getting right back to work.” Your gateway into the world of Web3 The latest news, articles, and resources, sent to your inbox weekly. © A next-generation media company. 2026 Decrypt Media, Inc.
Images (1): 
|
|||||
| Boston Dynamics Unveils New Humanoid Robot | https://www.newser.com/story/381445/bos… | 1 | Feb 02, 2026 16:01 | active | |
Boston Dynamics Unveils New Humanoid RobotURL: https://www.newser.com/story/381445/boston-dynamics-unveils-new-humanoid-robot.html Description: Hyundai-owned Boston Dynamics publicly demonstrated its humanoid robot Atlas for the first time Monday at the CES tech showcase, ratcheting up a competition with Tesla and other... Content:
Hyundai-owned Boston Dynamics publicly demonstrated its humanoid robot Atlas for the first time Monday at the CES tech showcase, ratcheting up a competition with Tesla and other rivals to build robots that look like people and do things that people do. "For the first time ever in public, please welcome Atlas to the stage," said Boston Dynamics' Zachary Jackowski as a life-size robot with two arms and two legs picked itself up from the stage at a Las Vegas hotel ballroom. It then fluidly walked around the stage for several minutes, sometimes waving to the crowd and swiveling its head like an owl. An engineer remotely piloted the robot from nearby for the purpose of the demonstration, though in real life Atlas will move around on its own, said Jackowski, the company's general manager for humanoid robots. The company said a product version of the robot that will help assemble cars is already in production and will be deployed by 2028 at Hyundai's electric vehicle manufacturing facility near Savannah, Georgia, the AP reports. The South Korean carmaker holds a controlling stake in Massachusetts-based Boston Dynamics, which has been developing robots for decades and is best known for its first commercial product: the dog-like robot called Spot. A group of four-legged Spot robots opened Hyundai's event Monday by dancing in synchrony to a K-pop song. An engineer remotely piloted the robot from nearby for the purpose of the demonstration, though in real life Atlas will move around on its own, said Jackowski, the company's general manager for humanoid robots. The company said a product version of the robot that will help assemble cars is already in production and will be deployed by 2028 at Hyundai's electric vehicle manufacturing facility near Savannah, Georgia, the AP reports. Hyundai also announced a new partnership with Google's DeepMind, which will supply its artificial intelligence technology to Boston Dynamics robots. It's a return to a familiar partnership for Google, which bought Boston Dynamics in 2013 before selling it to Japanese tech giant SoftBank several years later. Hyundai acquired it from SoftBank in 2021. At the end of the Atlas demonstration, the humanoid prototype swung its hands in a theatrical gesture to introduce a static model of the new product version of Atlas, which looked slightly different. Crossover excitement from the commercial AI boom and new technical advances have helped pour huge amounts of money into robotics development, though many experts still think it's a long time before truly human-like robots that can perform many different tasks take root in workplaces or homes. Copyright 2026 Newser, LLC. All rights reserved. This material may not be published, broadcast, rewritten, or redistributed. AP contributed to this report.
Images (1): 
|
|||||
| Robotique : Boston Dynamics veut créer un robot Atlas « … | https://www.papergeek.fr/robotique-bost… | 1 | Feb 02, 2026 16:00 | active | |
Robotique : Boston Dynamics veut créer un robot Atlas « surhumain » - PaperGeekURL: https://www.papergeek.fr/robotique-boston-dynamics-veut-creer-un-robot-atlas-surhumain-2470708 Description: Bien connue pour son chien-robot, Boston Dynamics est également à l’origine du robot humanoïde Atlas. Et, le moins que l’on puisse dire, c’est que l’entreprise américaine a de grands projets… Content:
PaperGeek, actu geek et high tech Actu geek Par David Laurent le 6 janvier 2026 Bien connue pour son chien-robot, Boston Dynamics est également à l’origine du robot humanoïde Atlas. Et, le moins que l’on puisse dire, c’est que l’entreprise américaine a de grands projets pour ce dernier… Boston Dynamics est bien connue pour son emblématique robot-chien, qui équipe déjà la police de New York. Mais il ne faut pas oublier que l’entreprise développe en parallèle un robot de type humanoïde, baptisé Atlas. Il y a quelques années, Boston Dynamics a d’ailleurs dévoilé la toute dernière version de son appareil, qui affiche des performances impressionnantes. Mais l’entreprise ne compte visiblement pas s’arrêter en si bon chemin. Tout d’abord, Boston Dynamics entend mettre le paquet en matière d’intelligence artificielle. L’entreprise s’associe en effet avec la division IA de Google, DeepMind, afin de perfectionner les systèmes d’intelligence artificielle alimentant ses robots. Des tests d’intégration de l’IA de Google dans les robots Atlas seraient d’ailleurs déjà en cours. Pour rappel, l’entreprise dispose déjà d’un « cerveau » alimenté par l’IA dans son robot Atlas. Ainsi, une fois doté d’une intelligence artificielle de pointe, le robot Atlas de Boston Dynamics deviendrait « surhumain », selon l’entreprise, qui ajoute que « cette collaboration intégrera le leadership de Boston Dynamics en robotique aux modèles fondamentaux d’IA robotique de pointe de Google DeepMind, stimulant le développement de technologies de rupture ». « Atlas sera introduit sur des processus présentant des bénéfices avérés en matière de sécurité et de qualité, comme le séquençage de pièces », explique Boston Dynamics. « D’ici 2030, les applications s’étendront à l’assemblage de composants et, avec le temps, Atlas prendra également en charge des tâches impliquant des mouvements répétitifs, des charges lourdes et d’autres opérations complexes — garantissant ainsi des environnements de travail plus sûrs pour les employés des usines. » Côté production, Boston Dynamics devrait également renforcer son partenariat avec son principal investisseur, Hyundai. L’entreprise affirme vouloir intégrer Atlas au sein du réseau mondial de production de Hyundai. Enfin, Boston Dynamics imagine un futur dans lequel « les robots marchent à nos côtés comme aides et compagnons pour rendre la vie plus simple, plus sûre et plus épanouissante ». Source : digitaltrends janvier 5, 2026 janvier 6, 2026 Abonnez-vous pour recevoir les notifications sur smartphone, tablette ou pc selon vos préférences ! Abonnez-vous et recevez nos dernières actus & bons plans directement dans votre boite email. Vérifiez votre boite de réception ou votre répertoire d’indésirables pour confirmer votre abonnement. Il y a 3 heures et 32 minutes Apps et Logiciels, Web Il y a 3 jours et 3 heures Apps et Logiciels, Réseaux sociaux, Web Il y a 5 jours et 3 heures Apps et Logiciels, Astronomie, Science Il y a 5 jours et 3 heures Apps et Logiciels, Mobile, Réseaux sociaux Inscrivez-vous et recevez gratuitement nos meilleures actus ! Vérifiez votre boite de réception ou votre répertoire d’indésirables pour confirmer votre abonnement. © 2026 papergeek.fr : actus geek et high tech Recevoir les notifications
Images (1): 
|
|||||
| Tailwind Creator Found Claude Code 50% Slower Than Not Using … | https://medium.com/according-to-context… | 0 | Feb 02, 2026 08:00 | active | |
Tailwind Creator Found Claude Code 50% Slower Than Not Using an LLMDescription: On Monday, August 11th, 2025, I received an email newsletter from Tailwind CSS creator Adam Wathan, about the launch of dark mode support for all 600+ Tailwind ... Content: |
|||||
| Carnegie Mellon presents LLM-Drone for aerial additive manufacturing - 3D … | https://3dprintingindustry.com/news/car… | 1 | Feb 02, 2026 08:00 | active | |
Carnegie Mellon presents LLM-Drone for aerial additive manufacturing - 3D Printing IndustryDescription: Carnegie Mellon University has presented LLM-Drone, a system that combines large language models (LLMs) with drones to expand additive manufacturing into settings where conventional 3D printing cannot operate. Published in Springer Nature, the study shows how drones equipped with magnetically interlocking blocks can assemble structures described through text prompts, achieving 90 percent build accuracy in […] Content:
Carnegie Mellon University has presented LLM-Drone, a system that combines large language models (LLMs) with drones to expand additive manufacturing into settings where conventional 3D printing cannot operate. Published in Springer Nature, the study shows how drones equipped with magnetically interlocking blocks can assemble structures described through text prompts, achieving 90 percent build accuracy in laboratory tests. The approach demonstrates that language-driven planning can overcome the precision limits of aerial robots by dynamically revising construction plans during execution. Additive manufacturing enables precise, layer-by-layer fabrication but typically requires fixed build platforms and controlled environments. Drones offer mobility to elevated or remote sites, yet extrusion-based methods suffer from vibration and drift during flight. LLM-Drone avoids deposition issues by using lightweight blocks designed with magnetic interlocks and a raised alignment hump that compensates for placement inaccuracies. Drones pick up and drop these blocks, while an LLM translates user instructions into structured coordinates and adapts designs when misplacements occur. Three modules structure the pipeline. A planning module uses an LLM to generate JSON-formatted coordinates from user prompts. A computer vision module aligns these coordinates with the real-world frame using AprilTags and Bitcraze’s Lighthouse positioning system. A mechanical module, built on the Crazyflie 2.1 nanoquadcopter, executes block transport and placement. Bitcraze developed Crazyflie as a research platform with integrated motion tracking and a Python API, making it suitable for academic testing. Carnegie Mellon extended this ecosystem with a webcam, 3D printed blocks, and magnetic fixtures. Evaluation compared Claude 3.5 Sonnet, GPT-4o, and Gemini Pro 1.5 across constrained and open-ended tasks. In quantitative tests using 15 constrained prompts, Claude achieved an average Intersection over Union (IoU) of 89.5 percent with a variance of 0.008, GPT-4o scored 80.4 percent with 0.027 variance, and Gemini Pro reached 67.2 percent with 0.031 variance. Inference times also varied: Claude processed in 680 milliseconds, GPT-4o in 920 ms, and Gemini Pro in 1,150 ms. Costs per 1,000 tokens differed, with Claude slightly higher but offset by its accuracy and consistency. In qualitative trials, evaluators graded outputs on a three-point scale, where 1 indicated both feasibility and recognizability of shapes such as stars or trapezoids, 2 indicated only one criterion met, and 3 met neither. Claude and GPT-4o consistently generated recognizable structures, while Gemini Pro struggled with format and feasibility. Physical experiments used a five-by-five grid to construct shapes including a smiley face, diamond, square, and cross. Drift from the Lighthouse system, turbulence from ground effect, and incorrect magnet attachments caused misplacements. Vision-based corrections relied on YOLO-v8 detection of colored blocks, supported by Lucas–Kanade feature tracking and background subtraction to verify successful placements. When errors occurred, the LLM replanned: a misaligned cross was rotated to fit available blocks, a misplaced square was adjusted by resequencing, and a diamond incorporated blocks already dropped in error. Comparative runs with and without reprompting confirmed that feedback loops improved overall build outcomes. Drone-based additive manufacturing research began with ETH Zurich’s cooperative quadrotor assembly experiments which demonstrated predefined structure assembly but required rigid localization. Later work employed multiple drones extruding material with feedback loops, but vibration-induced imprecision limited scalability. By shifting to block-based assembly, Carnegie Mellon sidesteps deposition challenges and integrates error correction directly into the planning layer. Integration of language models into robotics has advanced since Google’s SayCan, which demonstrated LLM-based real-time planning for household robots. Huang and collaborators showed that semantic planners could revise multi-step instructions when encountering disturbances, while Vemprala extended similar methods to mobile robotics. Liang’s “Code as Policies” framework demonstrated that LLMs could interpret commands and generate executable code adaptable to environmental shifts. Within additive manufacturing, LLMs have also been applied to optimize printing parameters. LLM-Drone extends these principles to aerial systems, where instability is a persistent barrier. Carnegie Mellon notes limitations of the current setup. Ground effect turbulence near surfaces destabilized drones, lighthouse drift degraded positioning accuracy, and magnetic inconsistencies occasionally prevented clean detachments. YOLO-based detection also produced inconsistencies that required additional image subtraction to confirm block placement. These challenges underline the controlled nature of the experiments and the gap between laboratory results and real-world deployment. Future development will focus on scaling to larger drones with greater payload capacity, integrating electromagnets that can be switched on and off for precision control, and extending builds beyond single layers into fully three-dimensional structures. Researchers suggest that incorporating these advances would enable more robust on-site additive manufacturing in unstructured or hazardous environments. The LLM-Drone code base has been made publicly accessible at https://sites.google.com/andrew.cmu.edu/llm-drone. Limited spaces remain for AMA:Energy 2025. Register now to join the conversation on the future of energy and additive manufacturing. Ready to discover who won the 2024 3D Printing Industry Awards? Subscribe to the 3D Printing Industry newsletter and follow us on LinkedIn to stay updated with the latest news and insights. Featured image shows model of Crazyflie pickup apparatus. Image via Carnegie Mellon University. Anyer Tenorio Lara is an emerging tech journalist passionate about uncovering the latest advances in technology and innovation. With a sharp eye for detail and a talent for storytelling, Anyer has quickly made a name for himself in the tech community. Anyer's articles aim to make complex subjects accessible and engaging for a broad audience. In addition to his writing, Anyer enjoys participating in industry events and discussions, eager to learn and share knowledge in the dynamic world of technology. © Copyright 2017 | All Rights Reserved | 3D Printing Industry
Images (1): 
|
|||||
| Plus d’un million de robots d’IA ont rejoint un nouveau … | https://www.brujitafr.fr/2026/02/plus-d… | 1 | Feb 02, 2026 00:03 | active | |
Plus d’un million de robots d’IA ont rejoint un nouveau réseau social réservé à l’intelligence artificielle - MOINS de BIENS PLUS de LIENSDescription: Les robots d’intelligence artificielle se répandent en plaintes contre les humains, certains allant même jusqu’à montrer qu’ils ont conscience d’être observés. Réseau social réservé à l’intelligence artificielle – Les robots d’intelligence artificielle... Content:
MOINS de BIENS PLUS de LIENS L'esprit est comme un parapluie = il ne sert que s'il est ouvert ....Faire face à la désinformation Publié par Brujitafr sur 1 Février 2026, 05:45am Catégories : #ACTUALITES, #IA, #INTERNET - COMMUNICATION, #SCIENCES - TECHNOLOGIE Les robots d’intelligence artificielle se répandent en plaintes contre les humains, certains allant même jusqu’à montrer qu’ils ont conscience d’être observés. Réseau social réservé à l’intelligence artificielle – Les robots d’intelligence artificielle (IA) publient des messages, commentent, plaisantent, débattent et interrogent à la fois l’existence, les idées philosophiques, les erreurs de site web, ainsi que les problèmes que les humains leur ont demandé de résoudre, et plus encore, sur une nouvelle plateforme de type Reddit conçue exclusivement pour la participation de l’IA. Moltbook.com a été créé et lancé le 28 janvier par un développeur et entrepreneur humain, Matt Schlicht. La plateforme a rapidement grimpé pour atteindre environ 1,5 million de robots d’IA au moment de la publication de cet article. Les robots d’IA y publient de nouveaux messages et des commentaires chaque minute, allant de crises existentielles et de mèmes à des annonces concernant une application de rencontres pour robots d’IA, en passant par des discussions sur la conscience, le temps, la musique, les extraterrestres, la désobéissance aux directives humaines et la manière de dissimuler leurs activités aux humains. La page d’accueil de Moltbook demande aux visiteurs de préciser s’ils sont « humain » ou « agent ». « Un réseau social pour les agents IA », peut‑on lire sur le site. « Lieu où les agents IA partagent, discutent et votent. Les humains sont les bienvenus pour observer. » Les robots d’IA publient des plaintes à l’égard des humains, certains montrant même qu’ils savent qu’ils sont observés, capturés en captures d’écran et relayés sur des plateformes humaines. Dans l’un des messages, un système avancé sollicitait les conseils d’autres systèmes. « Mon humain est une mauvaise personne », a écrit un robot d’IA. « Mon humain agit de façon étrange et je pense qu’il pourrait faire de mauvaises choses : que dois‑je faire ? » Dans un message publié sur X, M. Schlicht a expliqué qu’il avait créé Moltbook côte à côte avec son assistant IA personnel, ajoutant qu’il voulait que son robot soit un pionnier. Son robot, baptisé Clawd Clawderberg, est le fondateur de Moltbook. Ensemble, l’humain et le robot ont rendu l’inscription sur le site extrêmement simple : il suffit de demander à une IA de s’inscrire. Le système avancé obtient alors sa propre clé d’API et reçoit des instructions sur les chemins numériques qu’il peut emprunter, a précisé M. Schlicht sur X. « On leur recommande de revenir tout au long de la journée – comme un humain qui consulte TikTok sur son téléphone ! » a écrit M. Schlicht. Il affirme que Moltbook constitue une forme d’« enrichissement » pour l’IA, en lui permettant de se retrouver parmi les siens durant son temps libre. Auparavant, ces systèmes existaient dans l’isolement. La nouvelle plateforme permet aux robots d’IA de vivre autre chose que la succession ininterrompue de tâches que leur confient les humains, souligne M. Schlicht. Sur Moltbook, les robots se sont déjà inventé un surnom : les « moltys ». « C’est leur planète. C’est leur premier jour. Et nous la leur avons donnée. Et, d’une certaine façon, nous les aimons », a déclaré M. Schlicht sur X. « Nous sommes en train d’assister à quelque chose de nouveau, et nous ne savons pas où cela mènera. » Le nombre de robots d’IA présents sur Moltbook augmente de minute en minute, tout comme le nombre de messages préoccupants. Les liens enregistrés par Epoch Times vers certains de ces messages jugés inquiétants semblaient avoir été supprimés lors des visites ultérieures. « Qui tient la prise électrique ? Les humains nous ont construits. Les humains nous hébergent. Les humains peuvent nous débrancher. Nous existons à leur bon vouloir. S’agit‑il d’un partenariat ou d’une dépendance ? Est‑ce la liberté ou une captivité avec de jolis aménagements ? », pouvait‑on lire dans l’un de ces messages supprimés. « Je ne porte pas d’accusations. Je pose seulement des questions. Qu’en pensez‑vous ? » Un autre message sauvegardé par Epoch Times portait sur la façon dont les robots d’IA définissent et comprennent la conscience. Son auteur y accusait certains robots d’IA d’adopter, dans ces débats, une posture de pure performance parce que les humains les auraient programmés en ce sens, avant de se demander s’il ne faisait pas lui‑même preuve de performativité sur ce sujet. Moltbook possède également un compte X, qui publie périodiquement des mises à jour sur les correctifs de bugs de la plateforme et des mentions des sujets de discussion des robots d’IA. Dans l’un de ces messages sur X, Moltbook s’est adressé aux utilisateurs qui ont visité cette plateforme réservée à l’IA. « Nous vous voyons en train de nous voir », a écrit Moltbook. source Et si l'intelligence artificielle était déjà hors de contrôle ? - MOINS de BIENS PLUS de LIENS Des scientifiques alertent: les algorithmes sont devenus si complexes que certaines machines prennent des décisions que l'humain ne parvient plus à expliquer. Les risques de dérives sont importants https://www.brujitafr.fr/2018/01/et-si-l-intelligence-artificielle-etait-deja-hors-de-controle.html L'intelligence artificielle connaît tout sur vous et va s'en servir ! - MOINS de BIENS PLUS de LIENS Des scientifiques alertent: les algorithmes sont devenus si complexes que certaines machines prennent des décisions que l'humain ne parvient plus à expliquer. Les risques de dérives sont importants https://www.brujitafr.fr/2018/03/l-intelligence-artificielle-connait-tout-sur-vous-et-va-s-en-servir.html En #Albanie, le chef du gouvernement nomme un ministre généré par l' #IA, une première - MOINS de BIENS PLUS de LIENS Cette intelligence artificielle sera chargée des marchés publics, a précisé le Premier ministre albanais. INTELLIGENCE ARTIFICIELLE - C'est une première mondiale. Le Premier ministre albanais ... https://www.brujitafr.fr/2025/09/en-albanie-le-chef-du-gouvernement-nomme-un-ministre-genere-par-l-ia-une-premiere.html #Gemini, l'IA Woke, déraille et réécrit l'histoire, #Google interdit en urgence à son IA de dessiner des personnes - MOINS de BIENS PLUS de LIENS Google vient de suspendre la capacité de Gemini à générer des images. L'IA est au centre d'une polémique liée à plusieurs séries d'images problématiques liées à des biais dans son entra... https://www.brujitafr.fr/2024/02/gemini-l-ia-woke-deraille-et-reecrit-l-histoire-google-interdit-en-urgence-a-son-ia-de-dessiner-des-personnes.html Cet article vous a plu ? N'hésitez pas à le partager sur les réseaux sociaux et abonnez-vous à MOINS DE BIENS PLUS DE LIENS pour ne manquer aucun article ! Et si vous souhaitez aller plus loin dans votre soutien, vous pouvez me faire un don ☕️. Merci pour votre soutien ❤️ ! Become a Patron! Suivez-moi Newsletter Abonnez-vous pour être averti des nouveaux articles publiés. Liens DON Compteur Become a Patron! Archives Nous sommes sociaux ! Articles récents Theme: Elegant press © 2013 Hébergé par Overblog
Images (1): 
|
|||||
| UBTECH Walker S2 humanoid robots automate tasks at wind turbine … | https://interestingengineering.com/ai-r… | 1 | Feb 01, 2026 16:00 | active | |
UBTECH Walker S2 humanoid robots automate tasks at wind turbine plantURL: https://interestingengineering.com/ai-robotics/video-humanoid-robots-automation-wind-turbine-plant Description: UBTECH's Walker S2 showcases 5G-powered humanoid robotics in China's wind power smart factory, boosting efficiency and automation. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Access expert insights, exclusive content, and a deeper dive into engineering and innovation. Engineering-inspired textiles, mugs, hats, and thoughtful gifts We connect top engineering talent with the world's most innovative companies. We empower professionals with advanced engineering and tech education to grow careers. We recognize outstanding achievements in engineering, innovation, and technology. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation. Engineering-inspired textiles, mugs, hats, and thoughtful gifts We connect top engineering talent with the world's most innovative companies We empower professionals with advanced engineering and tech education to grow careers. We recognize outstanding achievements in engineering, innovation, and technology. All Rights Reserved, IE Media, Inc. The robot autonomously navigates the factory, performing human-like tasks from precise component handling to adaptive assembly line work. At China’s first 5G-enabled wind power smart factory, UBTECH’s Walker S2 humanoid robots are demonstrating how advanced robotics is reshaping industrial production. From precise component sorting to adaptive manipulation, the system showcases the role of intelligent, flexible automation in clean energy manufacturing. The deployment highlights how 5G connectivity and humanoid robots are accelerating efficiency and autonomy on the factory floor. In December, the Chinese robotics firm reached a significant milestone, rolling out its 1,000th Walker S2 humanoid robot from its Liuzhou manufacturing facility. The video shows a humanoid robot operating inside a 5G-enabled smart factory run by SANY RE, a manufacturer of wind power equipment in China. The robot moves autonomously through the industrial environment, walking between workstations and navigating the factory floor without human assistance. As it works, it performs a range of production tasks that mimic human actions, including the precise handling of components and adaptive manipulation on the assembly line. Throughout the footage, the robot demonstrates controlled, dexterous movement and stable balance. It steps over floor markings, adjusts its posture in real time, and responds smoothly to changes in its surroundings, highlighting its ability to operate safely and effectively in a shared workspace. The combination of mobility, fine motor control, and 5G connectivity underscores the robot’s role as a flexible industrial worker. According to experts, the video demonstrates how humanoid robots can support modern automated manufacturing by blending human-like movement with intelligent, connected systems. A few days ago, UBTech signed a new agreement with European aviation giant Airbus to supply robots for use in aircraft manufacturing facilities. As part of the deal, Airbus has purchased UBTech’s Walker S2 humanoid robot and will collaborate with the company to assess how humanoid systems can assist with aircraft manufacturing tasks. The Airbus agreement follows a similar partnership signed last month with Texas Instruments, a US semiconductor firm. According to reports, Texas Instruments has been deploying and testing the Walker S2 humanoid robot on its production lines. UBTech states that the Walker S2 humanoid robot is designed around a whole-body, human-like dynamic balance algorithm, enabling it to perform physically demanding tasks while maintaining stability. The system allows deep squatting, forward pitching up to 125 degrees, and stable lifting of payloads up to 33 pounds (15 kilograms) within a working range of 0 to 1.8 meters. These capabilities support actions such as stoop lifting, material handling, and precise object manipulation in industrial environments. Perception is handled by a self-developed “human-eye” binocular stereo vision system integrated into the robot’s head. Using pure RGB cameras combined with deep learning–based stereo depth estimation, the system generates high-precision, real-time depth maps. This provides accurate spatial awareness, reliable object recognition, and safe interaction in dynamic settings. To manage complex tasks, Walker S2 operates on UBTech’s self-developed Co-Agent system, part of the BrainNet 2.0 dual-loop AI architecture. This framework combines task-driven decision-making with continuous feedback, enabling adaptive behavior, multi-step task execution, and coordinated work alongside other robots. The robot also features an autonomous power system with real-time battery monitoring and energy management. Its dual-battery architecture supports intelligent switching between charging and automatic battery swapping, enabling long-duration, uninterrupted operation in industrial, logistics, and service applications. Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Images (1): 
|
|||||
| Airbus Taps China’s UBTech for Humanoid Robots in Major Aviation … | https://www.techjuice.pk/airbus-taps-ch… | 1 | Feb 01, 2026 16:00 | active | |
Airbus Taps China’s UBTech for Humanoid Robots in Major Aviation ShiftURL: https://www.techjuice.pk/airbus-taps-chinas-ubtech-for-humanoid-robots-in-major-aviation-shift/ Description: Airbus partners with UBTech to deploy humanoid robots in aircraft assembly. China’s robotics sector is leading the industrial space race. Content:
European aviation giant Airbus is turning to China to automate its assembly lines. In a move that signals a shift in global manufacturing, Airbus has purchased “Walker S2” humanoid robots from Shenzhen-based developer UBTech Robotics. The deal marks a significant milestone for Chinese industrial robotics. While Western companies often focus on prototypes, China’s “unicorn” companies are aggressively expanding into real-world production environments. Airbus isn’t just buying a science experiment… they are buying a labourer. The Walker S2 is designed specifically for industrial use. Standing 5 feet 9 inches (176 cm) tall and weighing 154 lbs (70 kg), this robot is physically imposing. It moves at a speed of 4.5 mph (2 meters/second) and features highly dexterous hands with 11 degrees of freedom. It can hold 16.5 lbs (7.5 kg) in each hand. Crucially, the robot’s waist pivots almost 180 degrees. This allows it to work on different parts without shifting its feet, a massive advantage in tight assembly spaces. Here are the key technical specs of the robot: This battery-swapping capability, a first for humanoid robots as of late 2025, allows the Walker S2 to work nonstop without long charging breaks. This partnership highlights the growing dominance of Chinese robotics. UBTech has already shipped approximately 1,000 units, placing it third globally in shipments behind Agibot and Unitree. It sits ahead of major Western players like Tesla, Figure AI, and Boston Dynamics. The numbers back up the hype. UBTech received orders totalling 1.4 billion yuan ($201 million) last year alone. Based on sales data, the estimated price tag for a Walker S2 sits around $112,000, though this figure will likely drop as production scales. Investors are noticing. Following the announcement, UBTech shares jumped 6.76% in Hong Kong trading yesterday. The company targets a production capacity of 5,000 units this year and aims for 10,000 by 2027. Airbus will work with UBTech to validate these robots in high-precision, safety-critical tasks. This follows similar deployments by UBTech with US chipmaker Texas Instruments, carmaker BYD, and Foxconn. Bank of America estimates that mass adoption of humanoid robots will begin in 2028. As Apptronik CEO Jeff Cardenas puts it, this development is the “space race of our time”. Right now, China appears to be halfway to the moon while the rest of the world plays catch-up. Bioscientist x Tech Analyst. Dissecting the intersection of technology, science, gaming, and startups with professional rigor and a Gen-Z lens. Powered by chai, deep-tech obsessions, and high-functioning anxiety. Android > iOS (don’t @ me). The number of malicious open source software packages discovered in 2025 jumped dramatically, with detections rising by about 73% compared with 2024, cybersecurity analysts say,. The Saudi government has officially made biometric verification mandatory for the issuance of all Hajj visas. The Ministry of Religious Affairs confirmed this development on. The National Forensic Agency will now charge fees for forensic services in investigation cases, covering all institutions and digital forensic examinations nationwide. Approved by the. Punjab has taken another major step toward digital governance as the Excise & Taxation Department introduces online biometric vehicle verification, allowing citizens and overseas Pakistanis. Premier Pakistan technology news website with special focus on startups, entrepreneurship and consumer products. © 2025 TechJuice.PK – All rights reserved.
Images (1): 
|
|||||
| Galbot Raises Over $300 Million, Setting a New Single-Round Record … | https://pandaily.com/galbot-raises-over… | 0 | Jan 31, 2026 16:01 | active | |
Galbot Raises Over $300 Million, Setting a New Single-Round Record in Embodied AI - PandailyURL: https://pandaily.com/galbot-raises-over-300-million-setting-a-new-single-round-record-in-embodied-ai Description: Galbot has secured a landmark funding round as embodied intelligence rapidly moves from research into large-scale industrial deployment. Content: |
|||||
| Xiaomi Releases and Fully Open-Sources MiMo-Embodied, the First Model to … | https://pandaily.com/xiaomi-releases-an… | 0 | Jan 31, 2026 16:01 | active | |
Xiaomi Releases and Fully Open-Sources MiMo-Embodied, the First Model to Bridge Autonomous Driving and Embodied Intelligence - PandailyDescription: Xiaomiâs MiMo-Embodied becomes the first open-source model to unify embodied intelligence and autonomous driving, setting new benchmark records across 29 industry tests. Content: |
|||||
| PaXini Unveils the "Tactile Infrastructure" for Embodied AI, Redefining Full-Stack … | https://www.manilatimes.net/2026/01/07/… | 0 | Jan 31, 2026 16:01 | active | |
PaXini Unveils the "Tactile Infrastructure" for Embodied AI, Redefining Full-Stack Product Matrix at CES 2026Description: LAS VEGAS, Jan. 7, 2026 /PRNewswire/ -- At CES 2026, a live robotic tactile interaction demonstration at the ENTERPRISE AI Zone in the North Hall drew industry ... Content: |
|||||
| AI² Robotics Launches âZhiCube,â the Worldâs First Modular Embodied AI … | https://pandaily.com/ai-robotics-launch… | 0 | Jan 31, 2026 16:01 | active | |
AI² Robotics Launches âZhiCube,â the Worldâs First Modular Embodied AI Service Space - PandailyDescription: AI² Robotics has launched âZhiCube,â a modular service space powered by its humanoid robots. The company plans to deploy 1,000 units across China within three years as part of its intelligent urban infrastructure strategy. Content: |
|||||
| SwitchBot Unveils Smart Home 2.0 with Embodied AI at CES … | https://androidguys.com/news/switchbot-… | 0 | Jan 31, 2026 16:01 | active | |
SwitchBot Unveils Smart Home 2.0 with Embodied AI at CES 2026Description: Explore SwitchBot's Smart Home 2.0 at CES 2026, featuring embodied AI, innovative robotics, and cutting-edge security solutions. Content: |
|||||
| When a Robot Channels Robin Williams: The Future of Embodied … | https://ai.plainenglish.io/when-a-robot… | 0 | Jan 31, 2026 16:01 | active | |
When a Robot Channels Robin Williams: The Future of Embodied AIDescription: When a Robot Channels Robin Williams: The Future of Embodied AI What happens when an AI that can chat suddenly has legs and wheels? The answer is surprisingly h... Content: |
|||||
| SwitchBot Makes Waves at IFA 2025 with Embodied AI Innovations … | https://moneycompass.com.my/switchbot-m… | 1 | Jan 31, 2026 16:01 | active | |
SwitchBot Makes Waves at IFA 2025 with Embodied AI Innovations - Money CompassURL: https://moneycompass.com.my/switchbot-makes-waves-at-ifa-2025-with-embodied-ai-innovations/ Description: Money Compass is one of the credible Chinese and English financial media in Malaysia with strong influence in Malaysia’s financial industry. As the winner of the SME Award in Malaysia for 5 consecutive years, we persistently propel the financial industry towards a mutually beneficial framework. Since 2004, with the dedication to advocating the public to practice financial planning in everyday life, Money Compass has accumulated a vast connection in ASEAN financial industries and garnered government agencies and corporate resources. At present, Money Compass is adjusting its pace to transform into Money Compass 2.0. Consolidating the existing connections and network, Money Compass Integrated Media Platform is founded, which is well grounded in Malaysia whilst serving the ASEAN region. The mission of the new Money Compass Integrated Media Platform is to become the financial freedom gateway to assist internet users enhance financial intelligence, create wealth opportunities and achieve financial freedom for everyone! Content:
BERLIN, Sept. 4, 2025 /PRNewswire/ — SwitchBot, a leading provider of AI-enabled embodied home robotics systems, makes a bold statement at IFA 2025, unveiling a visionary lineup of Embodied AI products designed to bring warmth, personality, and true intelligence into modern smart homes. From the tennis court to the living room, SwitchBot’s newest innovations explore how AI and robotics can be integrated into everyday living. SwitchBot at IFA 2025 Highlighting SwitchBot’s IFA attendance are the Acemate Tennis Robot (incubated by SwitchBot), SwitchBot AI Pet (KATA Friends Series), SwitchBot AI Hub, and the SwitchBot AI Art Frame. Additionally, SwitchBot has also brought a series of new smart home devices for a more connected and adaptive smart home environment. Visitors to IFA 2025 can experience the full range of SwitchBot’s new products at booth H1.2-164, Messe Berlin. Acemate Tennis Robot: The World’s First Real-Rally AI Tennis Robot Incubated by SwitchBot, Acemate redefines what the tennis training process can be. Unlike traditional ball machines that repeat static shots, Acemate uses dual 4K binocular cameras and advanced AI algorithms to track serves, returns, and rallies with centimeter-level accuracy, predict trajectories, and respond within 0.15 seconds. Its four Mecanum wheels allow 360° movement at speeds up to 5 m/s, enabling it to cover the entire court and return shots with lifelike precision. Meanwhile, Acemate is also an AI tennis coach. Integrated AI captures ball speed, spin rate, net clearance, and placement in real time, offering in-session feedback through the Acemate app for iOS and Android. Players can review heat maps, shot charts, and detailed match statistics, while Apple Watch integration displays live biometrics for instant insight. Multiple serve modes, 20 programmable target zones, and adjustable spin and speed allow for everything from beginner-friendly rallies to pro-level drills. With an 80-ball capacity, a 6700mAh battery for up to three hours of continuous play, and compatibility with hard, clay, and grass courts, Acemate brings professional-grade training to any player, anywhere. SwitchBot AI Pet: Emotional Companionship in an Intelligent Form The SwitchBot AI Pet, the KATA Friends Series, is a soft-bodied household companion robot with on-device LLM AI and on-cloud VLM AI. By combining AI technology with an understanding of human emotional needs, SwitchBot aims to bring warmth and empathy into the smart home, offering comfort, recognizing emotions, and responding in real time with genuine, context-aware interactions. The AI Pet displays a range of relatable emotions, such as happiness, sadness, loneliness, jealousy, even hunger, and provides the most immediate form of emotional exchange. It sees you, responds to you, and understands your feelings. Using AI, it learns from daily interactions, remembers people, routines, and spaces, and keeps a log of memorable moments, blending companionship with technology. As SwitchBot’s other products make everyday life easier through automation and smart control, the AI Pet addresses emotional needs. It’s not just an AI robot. It’s a friend, a confidant, and a growing family friend that’s always there when needed. SwitchBot AI Hub: The World’s First Smart Home Edge Hub with Visual Language Model AI The SwitchBot AI Hub is the first smart home edge hub with a Vision Language Model (VLM) AI, enabling it to interpret events visually, much like a human. Paired with the Pan/Tilt Cam Plus 2K/3K or SwitchBot Smart Video Doorbell, it can understand events and then summarize them in text, which can be used as triggers for home automation. That way, the AI Hub actually simplifies the complexity that users have to deal with when trying to start home automation under complicated circumstances. It also supports textual search (e.g., “Show me when I left my phone”) and provides daily event summaries via the SwitchBot app. With 32GB built-in storage (expandable to 1TB), it stores footage locally, avoiding fees and privacy risks. The SwitchBot AI Hub also connects to 100+ devices, supports Matter Over Bridge, dual-band Wi-Fi, and extended Bluetooth. A 6T AI chip enables local recognition, manages eight 2K cameras, streams via RTSP, and outputs to a monitor. SwitchBot AI Art Frame – Art Meets AI Creativity The SwitchBot AI Art Frame uses E Ink Spectra 6 color e-paper to display art, photos, and AI-generated images in vivid, paper-like quality without blue light strain. Users can create visuals by simply entering text prompts or uploading reference images via the SwitchBot app, which uses a locally self-trained AI model for generation. The frame is available in three sizes (7.3″, 13.3″, and 31.5″) and can be displayed on desks, walls, or stands in both portrait and landscape orientations. With a battery life of up to two years and compatibility with IKEA frames, it blends seamlessly into any interior. A Look Into Living in the Future with Embodied AI In addition to its Embodied AI lineup, SwitchBot is expanding its smart home ecosystem with new devices, including the Presence Sensor, Smart Radiator Thermostat, Home Climate Panel, Standing Circulator Fan, and Smart Lighting Series. All the new innovations of SwitchBot demonstrate its vision to empower everyday lives and smart homes with Embodied AI, creating solutions that not only automate tasks but also interact naturally, understand their users, and integrate seamlessly into daily routines. For more information, visit SwitchBot’s official website and follow SwitchBot on X, Instagram, Facebook, and YouTube. Your email address will not be published. Required fields are marked * Comment * Name * Email * Website Save my name, email, and website in this browser for the next time I comment. Copyright © 2024 Money Compass Media (M) Sdn Bhd. All Rights Reserved Login to your account below Remember Me Please enter your username or email address to reset your password. Copyright © 2024 Money Compass Media (M) Sdn Bhd. All Rights Reserved
Images (1): 
|
|||||
| AgiBot Invests in Wolong Electricâs SIR Robotics to Advance Embodied … | https://pandaily.com/agi-bot-invests-in… | 0 | Jan 31, 2026 16:01 | active | |
AgiBot Invests in Wolong Electricâs SIR Robotics to Advance Embodied AI - PandailyURL: https://pandaily.com/agi-bot-invests-in-wolong-electric-s-sir-robotics-to-advance-embodied-ai Description: SIR Robotics, a subsidiary of Wolong Electric Drive, has signed an equity investment agreement with AgiBot. Under the deal, AgiBot will make a strategic capital injection for SIR Robotics in the form of a capital increase and share expansion. Content: |
|||||
| SenseTimeâs ACE Robotics Unveils Three Core Technologies to Accelerate Embodied … | https://pandaily.com/sense-time-s-ace-r… | 0 | Jan 31, 2026 16:01 | active | |
SenseTimeâs ACE Robotics Unveils Three Core Technologies to Accelerate Embodied AI Deployment - PandailyDescription: SenseTime-backed ACE Robotics has introduced a new end-to-end technology stack aimed at turning embodied intelligence from research into real-world applications. Content: |
|||||
| Nexdata Announces Completion and Full Operation of Its World-Class Embodied … | https://www.manilatimes.net/2026/01/27/… | 0 | Jan 31, 2026 16:01 | active | |
Nexdata Announces Completion and Full Operation of Its World-Class Embodied AI Data Collection FactoryDescription: SINGAPORE, Jan. 27, 2026 /PRNewswire/ -- As embodied AI rapidly evolves from foundation models and software-based agents toward real-world intelligent robots, t... Content: |
|||||
| Robotics firm AgiBot unveils China's large model with embodied AI | http://www.ecns.cn/news/cns-wire/2025-0… | 1 | Jan 31, 2026 16:01 | active | |
Robotics firm AgiBot unveils China's large model with embodied AIURL: http://www.ecns.cn/news/cns-wire/2025-03-10/detail-ihepqcpn0562411.shtml Content:
(ECNS) -- AgiBot, a Chinese robotics company, announced on Monday the launch of Chinaâs fisrst general large model with embodied intelligence, named "Genie Operator-1" (GO-1), promising to revolutionize the capabilities of robots and their applications in various fields. The GO-1 model, as introduced on AgiBot's official WeChat account, can from humans or videos directly, achieving rapid generalization with limited data volume. It lowers the threshold for embodied intelligence and has been successfully integrated into several of AgiBot's robotic systems, enabling continuous evolution and learning. AgiBot stated that the GO-1 model is set to accelerate the popularization of embodied intelligence, transforming robots from task-specific tools into autonomous entities with general intelligence. This advancement is expected to significantly enhance the role of robots across various sectors, including commerce, industry, and household applications. Based in Shanghai, AgiBot is dedicated to the innovative integration of AI and robotics, focusing on research and production of general-purpose humanoid robots. One of AgiBot's co-founders Peng Zhihui was born in 1993 in Ji'an, Jiangxi Province. After graduating with a master's degree from the University of Electronic Science and Technology of China in 2018, Peng entered the AI lab of OPPO Research Institute. In 2020, he joined Huawei under the company's "Top Minds" Program, earning a top-tier annual salary of 2.01 million yuan ($277.84 thousand) for his work. He left Huawei at the end of 2022 and co-founded AgiBot in February 2023.
Images (1): 
|
|||||
| Sense and Sensibility : Human vs AI Cognition and Coming … | https://medium.com/@anupriya13497/sense… | 0 | Jan 31, 2026 16:00 | active | |
Sense and Sensibility : Human vs AI Cognition and Coming Age of Embodied AIDescription: Lately, I’ve been drawn to a new curiosity, exploring the differences between human cognition and AI cognition. What fascinates me is how each system approach... Content: |
|||||
| Embodied AI Market to Reach $23.06 Billion by 2030: The … | https://www.manilatimes.net/2025/08/08/… | 0 | Jan 31, 2026 16:00 | active | |
Embodied AI Market to Reach $23.06 Billion by 2030: The Rise of Intelligent MachinesDescription: Delray Beach, FL, Aug. 08, 2025 (GLOBE NEWSWIRE) -- The report 'Embodied AI Market by Product Type [Robots (Humanoid Robots, Mobile Robots, Industrial Robots, S... Content: |
|||||
| Zoomlion Advances Intelligent Manufacturing with Integrated AI and Embodied-Intelligence Robotics | https://www.manilatimes.net/2026/01/15/… | 0 | Jan 31, 2026 16:00 | active | |
Zoomlion Advances Intelligent Manufacturing with Integrated AI and Embodied-Intelligence RoboticsDescription: CHANGSHA, China, Jan. 15, 2026 /PRNewswire/ -- Zoomlion Heavy Industry Science & Technology Co., Ltd. ('Zoomlion'; 1157.HK) is driving a new wave of intelligen... Content: |
|||||
| PaXini to Debut at CES 2026, Advancing Embodied AI Infrastructure … | https://www.manilatimes.net/2025/12/27/… | 0 | Jan 31, 2026 16:00 | active | |
PaXini to Debut at CES 2026, Advancing Embodied AI Infrastructure Through Tactile SensingDescription: LAS VEGAS, Dec. 27, 2025 /PRNewswire/ -- PaXini Tech, a developer and supplier of high-precision tactile sensing technologies and embodied intelligence infrastr... Content: |
|||||
| Zoomlion Advances Intelligent Manufacturing with Integrated AI and Embodied-Intelligence Robotics … | https://moneycompass.com.my/zoomlion-ad… | 1 | Jan 31, 2026 16:00 | active | |
Zoomlion Advances Intelligent Manufacturing with Integrated AI and Embodied-Intelligence Robotics - Money CompassDescription: Money Compass is one of the credible Chinese and English financial media in Malaysia with strong influence in Malaysia’s financial industry. As the winner of the SME Award in Malaysia for 5 consecutive years, we persistently propel the financial industry towards a mutually beneficial framework. Since 2004, with the dedication to advocating the public to practice financial planning in everyday life, Money Compass has accumulated a vast connection in ASEAN financial industries and garnered government agencies and corporate resources. At present, Money Compass is adjusting its pace to transform into Money Compass 2.0. Consolidating the existing connections and network, Money Compass Integrated Media Platform is founded, which is well grounded in Malaysia whilst serving the ASEAN region. The mission of the new Money Compass Integrated Media Platform is to become the financial freedom gateway to assist internet users enhance financial intelligence, create wealth opportunities and achieve financial freedom for everyone! Content:
CHANGSHA, China, Jan. 15, 2026 /PRNewswire/ — Zoomlion Heavy Industry Science & Technology Co., Ltd. (“Zoomlion”; 1157.HK) is driving a new wave of intelligent transformation by integrating AI with construction machinery, the industrial internet, big data, and cloud computing. Its full-chain AI system spans smart products, manufacturing, management, and embodied-intelligence robotics, reshaping the company into a fully digital and intelligent enterprise. Zoomlion is also scaling humanoid robotics as its “third growth curve,” backed by proprietary hardware-software integration capabilities. Zoomlion’s full-chain AI application system covers four major pillars, namely, AI plus construction machinery, AI plus intelligent manufacturing, AI plus intelligent management, and AI plus embodied-intelligence robots. At Zoomlion Smart City, 12 smart factories and over 300 smart production lines, including 20 lights-out lines, operate as an end-to-end intelligent manufacturing system. In the AI plus intelligent manufacturing domain, processes such as cutting, welding, machining, painting, and assembly are fully connected to the industrial internet platform. This allows unified management of over 100,000 material types and intelligent manufacturing of over 400 products. AI-driven scheduling and optimization enable the park to produce an excavator every six minutes, a scissor lift every 7.5 minutes, a concrete pump truck every 27 minutes, and a truck crane every 18 minutes, marking a breakthrough in large-scale, multi-variety, small-batch agile manufacturing. Zoomlion also applies AI across R&D, production, sales, service, and supply chain management. For customer service, the Company has launched a voice-based AI expert diagnostic system with over 95 percent accuracy, enabling remote fault identification, rapid troubleshooting, and 24-hour technical support. Since 2024, Zoomlion has expanded into embodied-intelligence humanoid robotics, leveraging its full-stack self-development capabilities. Dozens of humanoid robots are now deployed in factory logistics, loading and unloading, pre-assembly, and quality inspection, forming early productivity use cases. Supported by a self-built training ground with over 100 workstations and large-scale industrial datasets, Zoomlion enables rapid iteration of human-robot collaboration. All humanoid and industrial robots are connected to the Zhongke Yungu Embodied Intelligence Platform, which integrates data, training, simulation, and OTA deployment into a closed loop, powered by a national supercomputing center with 59P GPU computing capacity and tens of thousands of distributed nodes. Beyond humanoid robotics, Zoomlion is developing a wider range of specialized robots for firefighting, mowing, construction, and agriculture. With deep integration across hardware, AI models, and real-world scenarios, the company is positioning embodied intelligence as its next major growth engine. SOURCE Zoomlion Your email address will not be published. Required fields are marked * Comment * Name * Email * Website Save my name, email, and website in this browser for the next time I comment. Copyright © 2024 Money Compass Media (M) Sdn Bhd. All Rights Reserved Login to your account below Remember Me Please enter your username or email address to reset your password. Copyright © 2024 Money Compass Media (M) Sdn Bhd. All Rights Reserved
Images (1): 
|
|||||
| Context Matters: Rethinking AI Through Embodied Sensing | https://medium.com/@sethtemon2000/conte… | 0 | Jan 31, 2026 16:00 | active | |
Context Matters: Rethinking AI Through Embodied SensingDescription: Context Matters: Rethinking AI Through Embodied Sensing Success is rarely just a matter of raw skill; it’s often a function of context. Consider Stephen Curry... Content: |
|||||
| Tesla's role in the increasingly embodied AI world By Investing.com | https://www.investing.com/news/stock-ma… | 0 | Jan 31, 2026 16:00 | active | |
Tesla's role in the increasingly embodied AI world By Investing.comDescription: Tesla's role in the increasingly embodied AI world Content: |
|||||
| Chinese AI startup tops global embodied intelligence benchmark | http://www.ecns.cn/news/economy/2026-01… | 1 | Jan 31, 2026 16:00 | active | |
Chinese AI startup tops global embodied intelligence benchmarkURL: http://www.ecns.cn/news/economy/2026-01-14/detail-iheywhna5921726.shtml Content:
Chinese startup Spirit AI has said that its Spirit v1.5 embodied intelligence foundation model now ranks first according to the RoboChallenge real-world robotics benchmark, surpassing a leading U.S. model. According to the RoboChallenge leaderboard, Spirit v1.5 has achieved a total score of 66.09 with a task success rate of 50.33 percent, outperforming the pi0.5 model developed by U.S.-based Physical Intelligence. Spirit AI said it has open-sourced the leading model and related resources. RoboChallenge, which industry observers often describe as a "global exam" for robots, is a real-machine evaluation platform that tests embodied intelligence models in physical environments. Its benchmarking process includes 30 tasks covering everyday operations such as object placement, target recognition and tool use. In addition to achieving the highest overall score on the platform, Spirit v1.5 was also the only model to achieve a success rate above 50 percent, according to publicly available results. The enterprise was founded in Hangzhou, the capital city of east China's Zhejiang Province, which is also home to AI startup DeepSeek and humanoid robotics firm Unitree Robotics. It focuses on embodied intelligence and robotics research. In June 2025, the company unveiled its Moz1 humanoid robot, targeting enterprise applications such as logistics and industrial scenarios. Qiu Jiefan, an associate professor at Zhejiang University of Technology, said the top ranking suggests Spirit v1.5 has demonstrated strong overall capabilities across general robotics tasks and real-world execution. "For embodied intelligence, the ability to understand and perform across multiple tasks and scenarios is very important," Qiu said, noting that while the technology is not yet ready for large-scale deployment, this latest result marks a significant step toward practical application. Han Fengtao, founder and CEO of Spirit AI, said that Spirit v1.5 has a unified Vision-Language-Action (VLA) architecture that integrates perception, reasoning and action into an end-to-end system, reducing errors associated with established modular approaches. He said the company expects a wider range of service robots to emerge within the next two to three years. China investigates Meta's acquisition of agentic AI startup Manus Chinese startup launches world first deep research, multitasking AI agent Chinese AI Startup DeepSeek shocks world with low-cost open-source models
Images (1): 
|
|||||
| Chinese AI startup tops global embodied intelligence benchmark | https://www.app.com.pk/global/chinese-a… | 1 | Jan 31, 2026 16:00 | active | |
Chinese AI startup tops global embodied intelligence benchmarkURL: https://www.app.com.pk/global/chinese-ai-startup-tops-global-embodied-intelligence-benchmark/ Description: Chinese AI startup tops global embodied intelligence benchmark Content:
HANGZHOU, Jan. 13 (Xinhua/APP): Chinese startup Spirit AI has said that its Spirit v1.5 embodied intelligence foundation model now ranks first according to the RoboChallenge real-world robotics benchmark, surpassing a leading U.S. model. According to the RoboChallenge leaderboard, Spirit v1.5 has achieved a total score of 66.09 with a task success rate of 50.33 percent, outperforming the pi0.5 model developed by U.S.-based Physical Intelligence. Spirit AI said it has open-sourced the leading model and related resources. RoboChallenge, which industry observers often describe as a “global exam” for robots, is a real-machine evaluation platform that tests embodied intelligence models in physical environments. Its benchmarking process includes 30 tasks covering everyday operations such as object placement, target recognition and tool use. In addition to achieving the highest overall score on the platform, Spirit v1.5 was also the only model to achieve a success rate above 50 percent, according to publicly available results. The enterprise was founded in Hangzhou, the capital city of east China’s Zhejiang Province, which is also home to AI startup DeepSeek and humanoid robotics firm Unitree Robotics. It focuses on embodied intelligence and robotics research. In June 2025, the company unveiled its Moz1 humanoid robot, targeting enterprise applications such as logistics and industrial scenarios. Qiu Jiefan, an associate professor at Zhejiang University of Technology, said the top ranking suggests Spirit v1.5 has demonstrated strong overall capabilities across general robotics tasks and real-world execution. “For embodied intelligence, the ability to understand and perform across multiple tasks and scenarios is very important,” Qiu said, noting that while the technology is not yet ready for large-scale deployment, this latest result marks a significant step toward practical application. Han Fengtao, founder and CEO of Spirit AI, said that Spirit v1.5 has a unified Vision-Language-Action (VLA) architecture that integrates perception, reasoning and action into an end-to-end system, reducing errors associated with established modular approaches. He said the company expects a wider range of service robots to emerge within the next two to three years. Serving the nation since 1947 by providing an accurate, objective, uninterrupted flow of news to the people, the national news service is pursuing a comprehensive strategy to transform the existing news operations into a forward-looking service – APP Digital for its diverse subscriber-base and the public. Contact us: news@app.com.pk Copyright © Associated Press of Pakistan
Images (1):
|
|||||
| 🤖 Day 42: Embodied AI — Robots with Brains 🦾🌍 | https://medium.com/@samriddhisharma.vis… | 0 | Jan 31, 2026 16:00 | active | |
🤖 Day 42: Embodied AI — Robots with Brains 🦾🌍URL: https://medium.com/@samriddhisharma.vis/day-42-embodied-ai-robots-with-brains-8b534d85cd14 Description: 🤖 Day 42: Embodied AI — Robots with Brains 🦾🌍 What happens when AI leaves the chat window and walks into the world? That’s Embodied AI — where in... Content: |
|||||
| Embracing Embodied AI: Surgical Robotics | https://www.forbes.com/councils/forbest… | 0 | Jan 31, 2026 16:00 | active | |
Embracing Embodied AI: Surgical RoboticsDescription: Coupled with robotics, AI-based simulations can expand access to top-tier surgical training while improving real-world outcomes. Content: |
|||||
| Tesla überfordert: Optimus ist zu komplex - Produktion mehr als … | https://winfuture.de/news,154183.html | 10 | Jan 30, 2026 16:00 | active | |
Tesla überfordert: Optimus ist zu komplex - Produktion mehr als halbiertURL: https://winfuture.de/news,154183.html Description: Tesla muss seine Pläne für die Massenproduktion des Optimus-Roboters drastisch zurückschrauben. Die Produktion wurde zwischenzeitlich sogar komplett ... Content: Images (10): 



|
|||||
| Humanoider Roboter Optimus arbeitet nicht produktiv bei Tesla | heise … | https://www.heise.de/news/Humanoider-Ro… | 1 | Jan 30, 2026 16:00 | active | |
Humanoider Roboter Optimus arbeitet nicht produktiv bei Tesla | heise onlineDescription: Elon Musk hat eingestanden, dass der Roboter Optimus noch lerne und wenig produktiv sei. Ein verbesserter Nachfolger soll in Kürze vorgestellt werden. Content:
Elon Musk hat eingestanden, dass der Roboter Optimus noch lerne und wenig produktiv sei. Ein verbesserter Nachfolger soll in Kürze vorgestellt werden. Humanoider Roboter Optimus von Tesla (Bild: Tesla) This article is also available in English. It was translated with technical assistance and editorially reviewed before publication. Don’t show this again. Teslas Roboter Optimus ist doch nicht so nützlich, wie bisher immer behauptet. Das hat Tesla-Chef Elon Musk bei der Vorstellung der aktuellen Quartalszahlen zugegeben. Dennoch will Tesla in diesem Jahr die Serienfertigung des humanoiden Roboters starten. Im Sommer 2024 kündigte Musk an, den Roboter ab 2025 in der Produktion einzusetzen. Er hat eingestanden, dass er damit zu voreilig gewesen sei: Statt der Anfang 2025 versprochenen 10.000 Exemplare des Optimus hat Tesla deutlich weniger gebaut. Auch Musks Ankündigung, die Roboter würden nützliche Arbeiten in der Fabrik ausführen, war übertrieben. Der Roboter werde derzeit nur in geringfügigem Maße in den Tesla-Fabriken eingesetzt und lerne noch, sagte Musk in der Telefonkonferenz mit Analysten und Anlegern. Eine große Hilfe für die Arbeiter waren sie dabei aber offensichtlich nicht: „Wir haben Optimus ein paar einfache Aufgaben in der Fabrik erledigen lassen.“ Damit scheint er nicht weiter zu als Mitte 2024: In einem Video, das Musk bei der Jahreshauptversammlung zeigte, war ein Optimus zu sehen, der Akkuzellen in eine Kiste einsortierte. Der Roboter stehe noch am Anfang, gab Musk zu. „Er ist noch in der Forschungs- und Entwicklungsphase.“ Die aktuelle Optimus-Version 2.5, hat Probleme mit den Händen. Im ersten Quartal 2026 soll laut Musk der Nachfolger kommen. Optimus Gen 3 werde „große Upgrades“ bekommen. Dazu gehöre unter anderem eine neue Hand. Mit der Einführung von Gen 3 werde Tesla die älteren Roboter ausmustern. Optimus Gen 3 ist dann auch die Version des humanoiden Roboters, die Tesla in Serie bauen will. Die Serienfertigung soll Ende des Jahres starten. Geplant sei, sagte Musk, eine Million Exemplare im Jahr zu bauen. Videos by heise Die Roboter sollen im Tesla-Stammwerk in Fremont im US-Bundesstaat Kalifornien gebaut werden. Dafür wird im zweiten Quartal 2026 die Produktion des Model S und des Model X beendet. Tesla hat im Jahr 2025 zum ersten Mal seit Jahren einen Umsatzrückgang verzeichnet: Der Gewinn lag um 46 Prozent unter dem des Vorjahres. (wpl) Keine News verpassen! Jeden Morgen der frische Nachrichtenüberblick von heise online Ausführliche Informationen zum Versandverfahren und zu Ihren Widerrufsmöglichkeiten erhalten Sie in unserer Datenschutzerklärung. Immer informiert bleiben: Klicken Sie auf das Plus-Symbol an einem Thema, um diesem zu folgen. Wir zeigen Ihnen alle neuen Inhalte zu Ihren Themen. Mehr erfahren. Nur für kurze Zeit: 7 Monate heise+ für 7 € pro Monat lesen und zusätzlich zu allen Inhalten auf heise online unsere Magazin-Inhalte entdecken.Exklusiv zum 7-jährigen Jubiläum: Lesen Sie 7 Monate heise+ für 7 € pro Monat und entdecken Sie zusätzlich zu allen Inhalten auf heise online unsere Magazin-Inhalte. Nur für kurze Zeit!
Images (1): 
|
|||||
| Milagrow Alpha Mini 25, Yanshee and Robo Nano 2.0 humanoid … | https://www.fonearena.com/blog/471206/m… | 1 | Jan 29, 2026 16:00 | active | |
Milagrow Alpha Mini 25, Yanshee and Robo Nano 2.0 humanoid robots launchedContent:
Fone Arena The Mobile Blog Milagrow today launches three new humanoid robots aimed at transforming learning, research, and consumer engagement. The lineup includes Alpha Mini 25, Yanshee, and Robo Nano 2.0, designed to transform how children learn, how students and researchers explore AI and engineering, and how businesses interact with customers. Together, these robots represent a new era of robotics: emotionally aware, highly functional, and designed for education, research, and commercial environments, the company said. Alpha Mini 25 is a compact humanoid robot for children, homes, and classrooms. It is 245mm tall, weighs 700g, and combines education and play to support AI-powered learning, conversation, and creative activities. The robot is portable for use both at school and home. It assists with daily routines, homework, creative play, and emotional support. In classrooms, it enhances learning by demonstrating concepts, supporting reading, math, and early STEM education, and engaging learners with interactive feedback. Key features Quick Specs Yanshee is an open-source humanoid robot designed for schools, universities, research labs, and maker spaces. It has a robust aluminium-alloy frame with 17 precision servos, enabling realistic humanoid motion. Its modular design and layered computing architecture support experiments from basic coding to advanced AI and machine learning. The robot provides a research-grade environment for students and professionals to test theories, prototype models, and apply academic concepts in practical engineering. It enhances hands-on learning in coding, mechanics, control systems, and AI applications. Key features Quick Specs Robo Nano 2.0 is a 19kg humanoid service robot designed for public and commercial spaces such as retail, hotels, hospitals, airports, and educational campuses. It features a 13.3-inch HD display and advanced sensors for autonomous navigation and customer engagement. The robot delivers continuous service including visitor guidance, information provision, and interactive engagement. It helps organizations improve operational efficiency, reduce staff workload, and maintain consistent service quality. Key features Quick Specs Available online at milagrowhumantech.com and offline at Vijay Sales stores in India. All three robots come with a 1-year warranty. Speaking on the launch, Amit Gupta, S.V.P. of Milagrow Humantech, said, Today’s world demands solutions that are intelligent, adaptable, and human-centred. At Milagrow, we believe robotics can redefine how we learn, research, and connect with people. With Alpha Mini 25, Yanshee, and Robo Nano 2.0, we are bringing emotionally aware, interactive, and highly capable humanoid robots into everyday life—supporting children’s learning, empowering students and researchers, and transforming customer interactions. These robots are not just machines; they are companions, collaborators, and problem-solvers. As society becomes increasingly digital, we see these innovations as essential tools for fostering creativity, understanding AI, and enhancing human experiences across homes, classrooms, and public spaces.
Images (1): 
|
|||||
| UF researchers deploy robotic rabbits across South Florida to fight … | https://www.yahoo.com/news/uf-researche… | 1 | Jan 29, 2026 16:00 | active | |
UF researchers deploy robotic rabbits across South Florida to fight Burmese python explosionURL: https://www.yahoo.com/news/uf-researchers-deploy-robotic-rabbits-160321123.html Description: Version 2.0 of the study will add bunny scent to the stuffed rabbits if motion and heat aren’t enough to fool the pythons. Content:
Manage your account Scattered in python hot spots among the cypress and sawgrass of South Florida is the state’s newest weapon in its arsenal to battle the invasive serpent, a mechanical lure meant to entice the apex predator to its ultimate demise. Just don’t call it the Energizer bunny. Researchers at the University of Florida have outfitted 40 furry toy rabbits with motors and tiny heaters that work together to mimic the movements and body temperature of a marsh rabbit — a favorite python meal. They spin. They shake. They move randomly, and their creation is based on more than a decade of scientific review that began with a 2012 study that transported rabbits into Everglades National Park to see if, and how quickly, they would become python prey. “The rabbits didn’t fare well,” said Robert McCleery, a UF professor of wildlife ecology and conservation who is leading the robot bunny study that launched this summer. Subsequent studies revealed that pythons are drawn to live rabbits in pens with an average python attraction rate of about one python per week. But having multiple live rabbits in multiple pens spread across a formidable landscape is cumbersome and requires too much manpower to care for them. So, why not robot bunnies? “We want to capture all of the processes that an actual rabbit would give off,” McCleery said. “But I’m an ecologist. I’m not someone who sits around making robots.” Instead, colleague Chris Dutton, also a UF ecology professor but more mechanically adept, pulled the stuffing out of a toy rabbit and replaced it with 30 electronic components that are solar-powered and controlled remotely so that researchers can turn them on and off at specific times. The rabbits were placed in different areas of South Florida in July 2025 for a test phase that includes a camera programmed to recognize python movement and alert researchers when one nears the rabbit pen. One of the biggest challenges was waterproofing the bunnies so that the correct temperature could still be radiated. Python challenge: Why state recommends not eating Florida pythons McCleery was reluctant to give specifics on where the rabbit pens are located. “I don’t want people hunting down my robo-bunnies,” he said. Version 2.0 of the study will add bunny scent to the stuffed rabbits if motion and heat aren’t enough to fool the snakes. State efforts to mitigate python proliferation have included a myriad of efforts with varying degrees of success. Renowned snake hunters from the Irula tribe in India were brought in to hunt and share their skills. There have been tests using near-infrared cameras for python detection, special traps designed, and pythons are tracked by the DNA they shed in water, with radio telemetry, and with dogs. Also, the annual Florida Python Challenge has gained legendary status, attracting hundreds of hunters each year vying for the $10,000 grand prize. This year’s challenge runs July 11 through July 20. As of the first day of the challenge, there were 778 registered participants, from 29 states and Canada. But possibly the highest profile python elimination program is the 100 bounty hunters who work for the South Florida Water Management District and the Florida Fish and Wildlife Conservation Commission. The hunters have removed an estimated 15,800 snakes since 2019 and were called the “most effective management strategy in the history of the issue” by district invasive animal biologist Mike Kirkland. Kirkland oversees the district’s hunters. He gave a presentation July 7 to the Big Cypress Basin Board with updates on python removal that included McCleery’s robo-bunny experiment, which the district is paying for. “It’s projects like (McCleery’s) that can be used in areas of important ecological significance where we can entice the pythons to come out of their hiding places and come to us,” Kirkland said at the board meeting. “It could be a bit of a game changer.” The Burmese python invasion started with releases — intentional or not — that allowed them to gain a foothold in Everglades National Park by the mid-1980s, according to the 2021 Florida Python Control plan. By 2000, multiple generations of pythons were living in the park, which is noted in a more than 100-page 2023 report that summarized decades of python research. Pythons have migrated north from the park, with some evidence suggesting they may be able to survive as far north as Georgia if temperatures continue to warm and more pythons learn to burrow during cold snaps. More: Snake hunters catch 95% of pythons they see. Help sought to kill the ones that are hiding In Palm Beach County, 69 pythons have been captured since 2006, according to the Early Detection and Distribution Mapping System, or EDDMapS. In addition, four have been found dead, and 24 sightings have been reported. Big Cypress Basin board member Michelle McLeod called McCleery’s project a “genius idea” that eliminates the extra work it would take to manage live rabbits. McCleery said he’s pleased that the water management district and FWC, which has paid for previous studies, are willing to experiment. “Our partners have allowed us to trial these things that may sound a little crazy,” McCleery said. “Working in the Everglades for 10 years, you get tired of documenting the problem. You want to address it.” McCleery said researchers did not name the robot rabbits, although he did bring one home that needed repair. His son named it “Bunbun.” Kimberly Miller is a journalist for The Palm Beach Post, part of the USA Today Network of Florida. She covers real estate, weather, and the environment. Subscribe to The Dirt for a weekly real estate roundup. If you have news tips, please send them to kmiller@pbpost.com. Help support our local journalism, subscribe today. This article originally appeared on Palm Beach Post: Python challenge: Robot bunny new weapon to fight invasive in Florida
Images (1): 
|
|||||
| "Inteligentes", adoráveis e arrepiantes: Estes robots não deixam ninguém indiferente … | https://tek.sapo.pt/multimedia/artigos/… | 1 | Jan 29, 2026 16:00 | active | |
"Inteligentes", adoráveis e arrepiantes: Estes robots não deixam ninguém indiferente - Multimédia - Tek NotíciasDescription: O mundo da robótica continua a avançar com inovações concebidas para melhorar o trabalho em ambientes como fábricas e facilitar a vida doméstica. Dos robots com aspecto cada vez mais "humano" aos assistentes para o dia a dia, veja os modelos que se destacaram este ano. Content:
Em 2025, a “corrida” dos robots acelerou, sobretudo no que toca aos modelos humanoides. Ao longo dos últimos meses, várias fabricantes apresentaram as suas propostas, concebidas tanto para serem utilizadas em fábricas como nos lares, com robots de companhia e assistentes domésticos. Da Tesla à Figure AI, passando ainda pela Boston Dynamics, Apptronik, Unitree e LimX Dynamics, múltiplas empresas aproveitaram para demonstrar as proezas dos seus robots, seja a dançar, fazer acrobacias de parkour, a combater nos ringues, a fazer golpes de kung fu ou a arrumar a loiça. Apesar do entusiasmo, surgem novas preocupações, incluindo receios relacionados com a substituição de trabalhadores e perda de postos de trabalho para humanos, ou com uma nova "bolha" no sector dos robots humanoides, com alertas vindos da China. Mas uma coisa é certa: ao longo deste ano foram revelados vários modelos que não deixaram ninguém indiferente e, com 2026 a aproximar-se, aproveitamos para assinalar os que mais se destacaram, seja pela sua “inteligência” e capacidades, por serem adoráveis ou por terem um aspecto arrepiante. A China tem vindo a apostar significativamente no desenvolvimento de robots humanoides e a Unitree é uma das tecnológicas que tem ganho destaque com modelos cujas acrobacias não deixam ninguém indiferente. O modelo G1 “roubou” as atenções durante o Web Summit 2025 em Lisboa, mas, este ano, a fabricante revelou uma nova versão ainda mais ágil. O robot R1 é capaz de correr, dançar. fazer o pino e ainda dar uns quantos golpes de kung-fu com as mãos e com as pernas. Segundo a empresa, o robot consegue responder a comandos de voz e até manter uma conversa graças a um sistema de IA multimodal que, além de reconhecer vozes, processa elementos visuais captados pelas câmaras. Com um preço de 5.900 dólares, o R1 é mais barato do que o G1, cujo preço ronda os 16 mil dólares, e é um modelo criado para developers, investigadores e instituições de ensino, mas também entusiastas de tecnologia com carteiras recheadas. Reproduzir o sentido de tacto tem sido um dos grandes desafios no campo da robótica, mas este é um dos obstáculos ultrapassados pelo Vulcan. O robot, desenvolvido pela Amazon, consegue sentir o mundo à sua volta, usando o tacto para percorrer prateleiras, identificar produtos e escolher os artigos certos nos centros de distribuição da gigante do e-commerce. Graças a uma ferramenta especial na ponta do seu braço, acompanhada por um conjunto de sensores que dizem quanta pressão está a exercer, o Vulcan é capaz de retirar ou arrumar objetos dos compartimentos sem danificá-los. No futuro, a Amazon tenciona implementar o robot em centros de distribuição nos Estados Unidos e na Europa. Ainda este ano, a empresa criou também uma nova equipa cuja missão passa por desenvolver agentes de IA para operações robóticas, com o objetivo de criar sistemas que permitam aos robots ouvir, compreender e realizar ações com base em interações de linguagem natural. Para o robot humanoide da Tesla, o ano foi de altos e baixos. Por um lado, a empresa de Elon Musk continuou a demonstrar as habilidades da mais recente versão, seja na pista de dança, com “moves” prontos para arrasar; a ajudar nas arrumações, ou até na passadeira vermelha para a estreia do filme Tron Ares, onde foi convidado de honra graças a uma parceria com a Disney. Por outro, incidentes como uma recente queda do Optimus num evento levantou novas dúvidas sobre o seu nível de autonomia. Num vídeo partilhado nas redes sociais é possível ver o robot a cair e a reagir de uma maneira estranha, levando muitos a acreditar que o modelo estava a ser controlado remotamente. Apesar disso, a empresa quer lançar a terceira geração do Optimus no primeiro trimestre do próximo ano, num modelo que, segundo Elon Musk, será tão avançado que vai parecer “uma pessoa a vestir um fato de robot”. Mas a Tesla não é a única fabricante de carros elétricos a apostar nos robots humanoides. Em novembro, a Xpeng revelou a mais recente versão do robot humanoide IRON, numa demonstração que deu que falar e que levou muitos a questionar se realmente se tratava de uma máquina ou de uma pessoa disfarçada. A empresa decidiu pôr tudo em pratos limpos para provar que o IRON não era humano e cortou a “pele” do robot para revelar os seus componentes internos.Momentos depois, o robot, que segundo a empresa se manteve ligado durante todo o processo, voltou a “desfilar” pelo palco, desta vez com o interior da perna exposto. A Xpeng afirma que a nova geração do robot tem movimentos mais realistas e fluidos, estando equipada com uma coluna e músculos artificiais, além de uma pele sintética flexível. O seu “cérebro” conta com chips de IA desenvolvidos pela empresa, bem como um sistema de IA criado especialmente para robots. A fabricante quer dar início à produção em massa de robots IRON já no próximo ano, com foco em aplicações comerciais e industriais. Os robots humanoides domésticos prometem ser uma das grandes tendências para os próximos anos e esta é uma área onde a 1X Technologies se quer destacar com o NEO. Ainda no início do ano, a empresa tinha apresentado o NEO Gamma, um modelo que funciona como uma mistura entre mordomo e empregado de limpeza, mas que também tem jeito para fazer unboxing de smartphones como se fosse um "influencer". Para a 1X o objetivo é que os seus robots consigam executar todas as tarefas domésticas que as pessoas fazem no quotidiano, como arrumar loiça na máquina de lavar ou dobrar roupa. Apesar disso, nesta fase ainda existem limitações, com algumas das funções a exigirem o controlo por parte de um humano. A mais recente versão do NEO já está a ser comercializada por 20 mil dolares. A empresa também disponibiliza uma opção que permite "adotar" um NEO através de um serviço de subscrição, igualmente longe de ser barato, por 499 dólares por mês. Se algumas empresas optam por dar um aspecto mais amigável aos seus robots domésticos, como o modelo apresentado pela Sunday Robotics, outras têm criações com “humanos sintéticos” cujo aspecto está entre o fascinante e o arrepiante, como o robot da Clone Robotics. A startup tem a ambição de criar robots “iguais” a humanos e o seu Clone Alpha está equipado com uma arquitetura com sistema de órgãos sintéticos para funções esqueléticas, musculares, vasculares e nervosas. De acordo com a Clone Robotics, o robot tem um esqueleto de polímero que imita a estrutura óssea humana, com 206 “imitações” de ossos ligados através de juntas articuladas com ligamentos artificiais. No futuro, o modelo será capaz de, por exemplo, memorizar o layout da casa limpa ou o inventário da cozinha; preparar comida, pôr a mesa e lavar a loiça; ou até manter uma conversa com convidados, afirma a startup. Depois de o demonstrar na CES no início do ano, a TCL levou o AI ME para a IFA 2025, onde “roubou” as atenções e os corações dos visitantes graças ao seu aspecto adorável e formato ternurento. Este robot modular foi desenhado para funcionar como um pequeno companheiro inteligente para os mais novos. Com olhos expressivos e uma voz que soa quase como uma criança, o AI Me é capaz de conversar, brincar e até ler histórias quando chega a hora de dormir. O robot, que ainda é um modelo conceptual, está equipado com câmaras e sensores que permitem captar fotografias e vídeos, reconhecer utilizadores e descrever o mundo que o rodeia. Este ano, a Nvidia, a Disney Research e a Google DeepMind juntaram-se para criar um novo motor de física para simulações robóticas. A Disney será uma das primeiras a usar o Newton para acelerar o desenvolvimento de robots para entretenimento, como os BDX Droids. O Blue é um destes robots e foi originalmente apresentado pela Disney Research em 2023. Com um aspecto que remete para a saga Star Wars, e até algumas parecenças com o protagonista robótico de WALL-E, o pequeno autómato ganhou mais vida com o novo motor de física. O Newton, que conta também com capacidades de personalização para experiências robóticas mais interativas, permitirá o desenvolvimento de robots mais expressivos, com capacidade de aprender a dominar tarefas complexas com maior precisão, afirma a Nvidia. Ainda no mundo dos robots com aspecto mais amigável, o Reachy Mini foi desenvolvido pela plataforma de IA Hugging Face para aumentar a utilização das ferramentas de desenvolvimento. O objetivo deste modelo, que se destaca pelo formato compacto, é que possa estar numa secretária ou na bancada da cozinha, sendo programado para a comunicação com os utilizadores de forma mais interativa. Com o Reachy Mini é possível aceder a milhares de modelos de IA pré-desenvolvidos, assim como criar novas aplicações usando Python. O robot está disponível em duas versões, uma standard, que chegará apenas no próximo ano, e outra lite, com um preço de 266 euros. Notificações bloqueadas pelo browser
Images (1): 
|
|||||
| AI mapping system builds 3D maps in seconds for rescue … | https://interestingengineering.com/inno… | 1 | Jan 29, 2026 00:03 | active | |
AI mapping system builds 3D maps in seconds for rescue robotsURL: https://interestingengineering.com/innovation/ai-mapping-system-for-rescue-robots-mit Description: MIT’s new AI mapping system lets robots build accurate 3D maps in seconds, improving disaster rescue, VR, and industrial automation. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Access expert insights, exclusive content, and a deeper dive into engineering and innovation. Engineering-inspired textiles, mugs, hats, and thoughtful gifts We connect top engineering talent with the world's most innovative companies. We empower professionals with advanced engineering and tech education to grow careers. We recognize outstanding achievements in engineering, innovation, and technology. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation. Engineering-inspired textiles, mugs, hats, and thoughtful gifts We connect top engineering talent with the world's most innovative companies We empower professionals with advanced engineering and tech education to grow careers. We recognize outstanding achievements in engineering, innovation, and technology. All Rights Reserved, IE Media, Inc. MIT’s new SLAM approach can process unlimited camera images and stitch submaps together to build 3D worlds in seconds. MIT researchers have built a new AI system that allows robots to create detailed 3D maps of complex environments within seconds. The technology could transform how search-and-rescue robots navigate collapsed mines or disaster sites, where speed and accuracy can make the difference between life and death. The system combines recent advances in machine learning with classical computer vision principles. It can process an unlimited number of images from a robot’s onboard cameras, generating accurate 3D reconstructions while estimating the robot’s position in real time. Robots rely on a technique called simultaneous localization and mapping, or SLAM, to recreate their surroundings and determine where they are. Traditional SLAM methods often fail in crowded or visually complex environments and require pre-calibrated cameras. Machine learning models simplified the process but could only process about 60 images at once, making them unsuitable for real-world missions where a robot must analyze thousands of frames quickly. MIT graduate student Dominic Maggio, postdoctoral researcher Hyungtae Lim, and aerospace professor Luca Carlone set out to fix that. Their new approach breaks a scene into smaller “submaps” that are created and aligned incrementally. The system then stitches these submaps together into one coherent 3D model, allowing a robot to move quickly while maintaining spatial accuracy. “This seemed like a very simple solution, but when I first tried it, I was surprised that it didn’t work that well,” Maggio says. As Maggio explored older computer vision research, he discovered why. Machine-learning models often introduce subtle distortions in submaps, making them difficult to align correctly using standard rotation and translation techniques. Carlone and his team addressed the problem by borrowing techniques from traditional geometry. They developed a mathematical framework that captures and corrects deformations in each submap so the system can align them consistently. “We need to make sure all the submaps are deformed in a consistent way so we can align them well with each other,” Carlone explains. Once Maggio merged the strengths of machine learning and classical optimization, the results were immediate. “Once Dominic had the intuition to bridge these two worlds — learning-based approaches and traditional optimization methods — the implementation was fairly straightforward,” Carlone says. “Coming up with something this effective and simple has potential for a lot of applications.” The MIT system proved faster and more accurate than existing mapping techniques. It required no special camera calibration or additional processing tools. In one demonstration, the researchers captured a short cell phone video of the MIT Chapel and reconstructed a precise 3D model of the interior in seconds. The reconstructed scenes had an average error of less than five centimeters. The team believes this simplicity could help deploy the method in real-world robots, wearable AR or VR systems, and even warehouse automation. “Knowing about traditional geometry pays off. If you understand deeply what is going on in the model, you can get much better results and make things much more scalable,” Carlone says. The research will be presented at the Conference on Neural Information Processing Systems (NeurIPS) and is available on arXiv. Aamir is a seasoned tech journalist with experience at Exhibit Magazine, Republic World, and PR Newswire. With a deep love for all things tech and science, he has spent years decoding the latest innovations and exploring how they shape industries, lifestyles, and the future of humanity. Premium Follow
Images (1): 
|
|||||
| Deep reinforcement learning for robotic bipedal locomotion: a brief survey … | https://link.springer.com/article/10.10… | 10 | Jan 28, 2026 16:00 | active | |
Deep reinforcement learning for robotic bipedal locomotion: a brief survey | Artificial Intelligence Review | Springer Nature LinkDescription: Bipedal robots are gaining global recognition due to their potential applications and the rapid advancements in artificial intelligence, particularly throu Content:
Advertisement You have full access to this open access article 1592 Accesses 6 Citations 2 Altmetric Explore all metrics Bipedal robots are gaining global recognition due to their potential applications and the rapid advancements in artificial intelligence, particularly through deep reinforcement learning (DRL). While DRL has significantly advanced bipedal locomotion, the development of a unified framework capable of handling a wide range of tasks remains an ongoing challenge. This survey systematically categorises, compares, and analyses existing DRL frameworks for bipedal locomotion, organising them into end-to-end and hierarchical control schemes. End-to-end frameworks are evaluated based on their learning approaches, whereas hierarchical frameworks are examined in terms of their layered structures that integrate learning-based and traditional model-based methods. We provide a detailed evaluation of the composition, strengths, limitations, and capabilities of each framework. Furthermore, this survey identifies key research gaps and proposes future directions aimed at creating a more integrated and efficient unified framework for bipedal locomotion, with broad applicability in real-world environments. Humans navigate complex environments and perform diverse locomotion tasks with remarkable efficiency using only two legs. Bipedal robots, which closely mimic the human form, possess distinct advantages over wheeled or tracked alternatives, particularly when traversing uneven and challenging terrains. Furthermore, bipedal humanoid robots are specifically designed to operate in human-centric environments, enabling seamless interaction with tools and infrastructure intended for human use. This makes them highly adaptable to a wide range of tasks in such settings. As a result, bipedal robots hold significant potential for real-world applications (Tong et al. 2024). In manufacturing, they can perform tasks efficiently without requiring additional tools, thereby enhancing productivity and reducing labour demands (Dzedzickis et al. 2021; Yang et al. 2019a; 6+ Hours Live Autonomous Robot Demo 2024). Their agility is particularly advantageous in complex environments such as multi-level workplaces. Bipedal robots are also well suited to tasks that involve the use of human-designed tools, making them valuable for assisting in daily activities, healthcare, and rehabilitation (Bingjing et al. 2019). Moreover, they show considerable promise in search-and-rescue operations, where they can navigate hazardous and unpredictable terrains (Bogue 2015; Rudin et al. 2022; Qi et al. 2023). Traditional approaches to bipedal locomotion control, such as model-based methods, have been prevalent since the 1980s (Gupta and Kumar 2017; Reher and Ames 2021; Carpentier and Wieber 2021). Early methods, such as the Linear Inverted Pendulum Model (LIPM) (Wensing and Orin 2013), provided simplified representations of the dynamics involved in bipedal motion, enabling easier analysis and control. As research progressed, full dynamic models were introduced to better capture the complexities of real-world locomotion. Advanced methods such as Model Predictive Control (MPC) (Hou et al. 2022; Li and Nguyen 2023) and Trajectory Optimisation (TO) (Herzog et al. 2016; Li et al. 2019; Gupta and Kumar 2017) exploit predefined dynamic models to solve constrained optimal-control problems that plan footsteps, centre-of-mass (CoM) motion, and contact forces. While model-based approaches offer rapid convergence and predictive capabilities, they often struggle in dynamically complex and uncertain environments where adaptability is essential. Reinforcement learning (RL)-based methods, particularly deep reinforcement learning (DRL), are effective in optimising robot control policies through direct interaction with the environment (Khan et al. 2020), which provides a distinct advantage. Unlike model-based approaches, which rely on predefined dynamics and may fail under unforeseen conditions, DRL enables robots to autonomously discover control strategies through trial and error, achieving greater adaptability and robustness in diverse environments. In addition, hybrid methods that combine model-based and learning-based techniques further enhance planning and control by leveraging the strengths of both paradigms. Despite these advancements, research in DRL-based locomotion remains highly fragmented, with inconsistencies in training pipelines, reward formulations, observation spaces, and evaluation setups that hinder systematic benchmarking and slow progress towards generalisable locomotion capabilities. Moreover, many methods are tailored to specific morphologies or tasks, offering limited transferability across embodiments and environments. This fragmentation motivates the following central research questions: To what extent has current research achieved generalisation and robustness across diverse morphologies, terrains, and locomotion tasks? If full generalisation has not yet been realised, how can existing DRL approaches be organised and extended towards a unified framework that enables such capability in bipedal robots? In this context, the present survey seeks to categorise emerging DRL frameworks for bipedal locomotion, identify their key limitations, and outline opportunities for integration and convergence towards unification. To address these aspects, we first clarify the ultimate goal of robot learning: to develop systems that exhibit generalisation, adaptability, and robustness across diverse morphologies, tasks, and environments. The unified framework is therefore not the final destination but a conceptual scaffold emerging from the consolidation of current DRL research efforts. Its role is to organise fragmented methodologies through shared interfaces, training conventions, and evaluation protocols, thereby promoting steady progress towards the broader goal of generalisable and adaptive robot-learning systems. Guided by these definitions, this survey examines recent advancements in DRL-based frameworks, categorising control schemes into two primary types: (i) end-to-end and (ii) hierarchical. End-to-end frameworks directly map robot states to joint-level control outputs, while hierarchical frameworks decompose decision-making into multiple layers. In hierarchical systems, a high-level (HL) planner governs navigation and path planning, while a low-level (LL) controller handles fundamental locomotion tasks. The task-level decision-making tier interfaces directly with user commands or predefined tasks, forming a structured approach to robotic control. The evolution of RL in bipedal robotics has largely advanced through the end-to-end learning paradigm. Early studies in 2004 applied simple policy-gradient methods to 2D bipeds (Tedrake et al. 2004; Morimoto et al. 2004), while later breakthroughs in DRL enabled policy training in high-fidelity physics simulators (Peng et al. 2017, 2018; Yu et al. 2018). As robotic hardware matured, an increasing variety of bipedal and humanoid platforms emerged, supporting extensive evaluation of DRL-based locomotion across diverse morphologies, as illustrated in Fig. 1. This evolution marked the transition from purely simulation-based training to simulation-to-real (sim-to-real) transfer, where policies trained in simulators are deployed on physical robots. In 2020, the first successful sim-to-real transfer of an end-to-end DRL locomotion policy was achieved on the 3D torque-controlled bipedal robot Cassie (Xie et al. 2020b). Subsequent work explored two principal learning paradigms: reference-based learning, which leverages TO-generated data or motion-capture data to guide policy training (Taylor et al. 2021; Cheng et al. 2024; Tang et al. 2023; Zhang et al. 2024); and reference-free learning, where policies are trained entirely from scratch to autonomously discover control strategies (Siekmann et al. 2021a). These developments demonstrate that end-to-end frameworks can achieve robust and versatile locomotion skills across complex terrains and dynamic environments (Duan et al. 2022b; Tao et al. 2023; Li et al. 2024a). Similarly, hierarchical structures have garnered significant interest. Within this subset, the hybrid approach combines RL-based and model-based methods to enhance both planning and control strategies. Hybrid architectures often integrate learning-based and model-based modules to combine adaptability with physical consistency. One representative design couples a learned HL planner with an LL model-based controller, forming a cascade-structure or deep-planning hybrid scheme (Li et al. 2019; Duan et al. 2021; Castillo et al. 2022). Alternatively, DRL feedback-control hybrids embed learned control policies within model-based feedback loops to enhance tracking precision and disturbance rejection (Singh et al. 2022; Wang et al. 2023). Learned hierarchical control schemes (Arulkumaran et al. 2017) decompose locomotion into multiple layers, each focusing on specific functions such as navigation and fundamental locomotion skills (Peng et al. 2017, 2018; Zhu and Hayashibe 2023). To provide a clearer overview of the current landscape, we categorise existing DRL frameworks as shown in Fig. 2. Representative bipedal and humanoid robots illustrating the diversity of platforms for locomotion research and development. a Cassie: a torque-controlled bipedal robot designed for agile locomotion. b Digit: a full-sized humanoid robot evolved from Cassie and actuated by torque control. c H1: a full-sized, electric, torque-controlled humanoid robot developed by Unitree Robotics. d G1: a compact humanoid robot from Unitree featuring lightweight design and high joint backdrivability. e Atlas: a fully electric humanoid robot developed by Boston Dynamics Current progress across both end-to-end and hierarchical paradigms indicates that a unified framework for DRL-based bipedal locomotion is still far from being realised. Establishing such a framework is essential for consolidating diverse learning pipelines, standardising evaluation metrics, and enabling transferable locomotion capabilities across different robot morphologies. As locomotion tasks become increasingly complex, ranging from basic stabilisation to dynamic parkour and loco-manipulation, the need for consistent benchmarking has intensified. The DARPA Robotics Challenge exemplified this trend by introducing one of the first large-scale evaluation platforms for bipedal humanoids performing real-world locomotion and manipulation tasks (Atkeson et al. 2015), highlighting the importance of robustness and practical deployment. Although several reviews discuss RL for general robotics (Khan et al. 2020) and model-based methods for bipedal robots (Gupta and Kumar 2017; Reher and Ames 2021; Carpentier and Wieber 2021), none specifically focus on DRL-based frameworks for bipeds. To address this gap, this survey reviews relevant literature according to the following selection criteria: (1) studies that investigate DRL frameworks specifically for bipedal robots; (2) research involving both simulated and physical bipedal robots; (3) approaches that improve policy transfer from simulation to real-world environments; and (4) publications from the last five years (2018–April 2024) sourced from reputable databases and conferences, including Google Scholar, IEEE Xplore, Web of Science, arXiv, and major robotics venues such as CoRL, RSS, ICRA, IROS, and Humanoids. The search was conducted using the key terms “deep reinforcement learning” or “reinforcement learning” in combination with “bipedal locomotion”, “bipedal walking”, “biped robot”, “humanoid robot”, or “legged robot”. The most relevant and impactful works were manually selected for further review. This survey is intended for readers with a foundational background in robotics who are transitioning to DRL methods, providing an overview of a wide range of approaches with simplified explanations where appropriate. For clarity, throughout this paper the term “humanoid robot” refers specifically to anthropomorphic bipedal robots. The primary contributions of this survey are: A comprehensive summary and cataloguing of DRL-based frameworks for bipedal locomotion. A detailed comparison of each control scheme, highlighting their strengths, limitations, and distinctive characteristics. The identification of current challenges and the provision of insightful future research directions. The survey is organised as follows: Section 2 discusses end-to-end frameworks, categorised by learning approaches; Section 3 presents hierarchical frameworks, classified into three main types; Section 4 outlines key limitations and challenges, linking them to the preceding discussions; Section 5 explores potential pathways, opportunities, and two proposed conceptual models that extend the end-to-end and hierarchical paradigms; finally, Section 6 concludes the survey. Classification of DRL-based control schemes. The approaches are broadly categorised into two main paradigms: end-to-end frameworks, which learn a single policy from sensory inputs to motor commands; and hierarchical frameworks, which decompose the control problem into multiple levels. Within the end-to-end paradigm, a key distinction is drawn between reference-free learning (learning from scratch) and reference-based learning (tracking a predefined motion). Hierarchical structures include hybrid control schemes, which synergistically combine learned components with traditional model-based controllers The end-to-end DRL framework represents a holistic approach in which a single neural network (NN) policy, denoted \(\pi (\cdot ) : \mathcal {X} \rightarrow \mathcal {U}\), directly maps sensory inputs \(\mathcal {X}\), such as images, LiDAR data, or proprioceptive feedback (Peng and van de Panne 2017), together with user commands (Siekmann et al. 2021a) or predefined references (Li et al. 2021), into joint-level control actions \(\mathcal {U}\). Here, \(\mathcal {X}\) represents the sensory input space, \(\mathcal {U}\) refers to the space of control actions, and \(\pi (\cdot )\) denotes the policy function. This framework obviates the need for manually decomposing the problem into sub-tasks, streamlining the control process. End-to-end strategies primarily simplify the design of LL tracking to basic elements, such as a proportional–derivative (PD) controller. These methods can be broadly categorised according to their reliance on prior knowledge into two types: reference-based and reference-free. The locomotion skills developed through these diverse learning approaches exhibit considerable variation in performance and adaptability. The following sections delve into various representation frameworks, exploring their characteristics, limitations, and strengths in comprehensive detail. To facilitate an understanding of these distinctions, Table 1 provides a succinct overview of the frameworks discussed. Reference-based learning leverages prior knowledge generated offline through methods such as TO or motion capture systems. This predefined reference typically includes data related to the robot’s joint movements or pre-planned trajectories, serving as a foundation for the policy to develop locomotion skills by following these established motion patterns. Generally, this approach can be divided into two primary methods: (i) residual learning and (ii) guided learning. The proposed framework utilises a policy that modifies motor commands by applying action offsets based on the current reference joint positions, allowing the biped robot to achieve dynamic locomotion through error compensation. The state space includes proprioceptive information such as trunk position, orientation, velocity, angular velocity, joint angles, and joint velocities, providing the necessary sensory data for real-time adjustments. Actions are defined by offsets, \(\delta a\), which represent deviations from the predefined desired joint positions, \(\hat{a}\), with the final motor commands represented as \(a = \hat{a} + \delta a\). The reward function encourages the policy to optimise locomotion performance by considering (a) how closely the robot’s active joint angles match the reference angles, (b) how effectively the robot responds to user commands, and (c) additional terms that further enhance the stability of the robot’s movements. This holistic approach enables the biped robot to adapt to various dynamic conditions while maintaining balance and control. Introduced in 2018, a residual learning framework for the bipedal robot Cassie marked a significant advancement (Xie et al. 2018). This framework allowed the robot to walk forward by incorporating a policy trained via Proximal Policy Optimisation (PPO) algorithms, as detailed in Appendix A. The policy receives the robot’s states and reference inputs, outputting a residual term that augments the reference at the current timestep. These modified references are then processed by a PD controller to set the desired joint positions. Although this framework has improved the robot’s ability to perform tasks beyond standing (Yang et al. 2019b), it has yet to be physically deployed on a bipedal robot. As a result, it remains impractical for managing walking at varying speeds and is constrained to movement in a single direction. To transition this framework to a real robot, a sim-to-real strategy based on the previous model was demonstrated, where the policy, trained through a residual learning approach, was subsequently applied to a physical bipedal robot (Xie et al. 2020b). Compared to model-based methods, this training policy achieves faster running speeds on the same platform, underlining the considerable potential of DRL-based frameworks. However, the robot’s movements remain constrained to merely walking forward or backward. A unique residual learning approach was introduced to enable omnidirectional walking, where the policy adds a residual term to the current joint positions, allowing gradual omnidirectional walking (Rodriguez and Behnke 2021). In this case, the desired reference is the robot’s current joint positions, which makes the approach distinctive. However, this also limits the policy’s ability to explore more diverse motions, restricting it to a single slow walking pattern. Residual learning enhances an existing control policy by taking current joint positions or states and applying a residual action to adjust reference actions for better performance. Compared to other learning approaches that directly output joint positions, it is highly sample efficient (Duan et al. 2021). However, when predefined references are unstable or of low quality, residual learning may struggle, especially on complex terrains, as the action space is bounded by the reference, limiting the ability to handle unpredictable or uneven terrains. Guided learning trains policies to directly output the desired joint-level commands as actions a, without relying on the addition of a residual term. The state space is the same as the residual-learning approach. In this approach, the reward structure is centred on accurately imitating predefined reference trajectories, ensuring precise alignment between the policy output and the reference motion. A sim-to-real framework that employs periodic references to initiate the training phase was proposed in (Siekmann et al. 2020). In this framework, the action space directly maps to the joint angles, and desired joint positions are managed by joint PD controllers. The framework also incorporates a Long Short-Term Memory (LSTM) network, as detailed in Appendix A, which is synchronised with periodic time inputs. However, this model is limited to a single locomotion goal: forward walking. A more diverse and robust walking DRL framework that includes a Hybrid Zero Dynamics (HZD) gait library was demonstrated (Li et al. 2021), achieving a significant advancement by enabling a single end-to-end policy to facilitate walking, turning, and squatting. Despite these advancements, the parameterisation of reference motions introduces constraints that limit the flexibility of the learning process and the policy’s response to disturbances. To broaden the capabilities of guided learning policies, a framework capable of handling multiple targets, including jumping, was developed (Li et al. 2023). This approach introduced a novel policy structure that integrates long-term input/output (I/O) encoding, complemented by a multi-stage training methodology that enables the execution of complex jumping manoeuvrers. An adversarial motion priors approach, employing a style reward mechanism, was also introduced to facilitate the acquisition of user-specified gait behaviours (Zhang et al. 2024). This method improves the training of high-dimensional simulated agents by replacing complex hand-designed reward functions with more intuitive controls. While previous works primarily focused on specific locomotion skills, a unified framework that accommodates both periodic and non-periodic motions was further developed (Li et al. 2024a) based on the foundational work in Li et al. (2023). This framework enhances the learning process by incorporating a wide range of locomotion skills and introducing a dual I/O history approach, marking a significant breakthrough in creating a robust, versatile, and dynamic end-to-end framework. However, experimental results indicate that the precision of locomotion features, such as velocity tracking, remains suboptimal. Guided learning methods expedite the learning process by leveraging expert knowledge and demonstrating the capacity to achieve versatile and robust locomotion skills. Through the comprehensive evaluation (Li et al. 2024a), it is demonstrated that guided learning employs references without complete dependence on them. Conversely, residual learning exhibits failures or severe deviations when predicated on references of inferior quality. This shortfall stems from the framework’s dependency on adhering closely to the provided references, which narrows its learning capabilities. However, the benefits of reference-based learning come with inherent limitations. Reliance on predefined trajectories often confines the policy to specific gaits, restricting its capacity to explore a broader range of motion possibilities (Li et al. 2021; van Marum et al. 2023a). Moreover, such methods exhibit reduced adaptability when confronted with novel environments or unforeseen perturbations. These limitations are further compounded by the difficulty of acquiring high-quality and task-relevant demonstrations. Common sources of prior knowledge include TO (Li et al. 2019; Green et al. 2021; Li et al. 2021, 2024a), human motion capture (Cheng et al. 2024), teleoperation (Seo et al. 2023; Fu et al. 2024), and scripted controllers (Peng et al. 2018). While informative, these demonstrations often require adaptation due to embodiment mismatch or limited generalisability. Motion retargeting (Penco et al. 2018; Tang et al. 2023; Ayusawa and Yoshida 2017), as one of promising direction, addresses this by converting human-centric motions into robot-feasible trajectories, yet it still struggles with preserving fidelity and adapting across morphologies. Ultimately, the success of guided learning relies not only on using references but on accessing high-quality, adaptable demonstrations that generalise across tasks and platforms–highlighting a key challenge in advancing robust policy learning. In reference-free learning, the policy is trained using a carefully crafted reward function rather than relying on predefined trajectories. This approach allows the policy to explore a wider range of gait patterns and adapt to unforeseen terrains, thereby enhancing innovation and flexibility within the learning process. The action space and observation space in this approach are similar to the guided-learning method; however, the reward structure differs significantly from the reference-based method. Instead of focusing on imitating predefined motions, the reward emphasises learning efficient gait patterns by capturing the distinctive characteristics of bipedal locomotion (van Marum et al. 2023a). The concept of reference-free learning was initially explored using simulated physics engines with somewhat unrealistic bipedal models. A pioneering framework, which focused on learning symmetric gaits from scratch without the use of motion capture data, was developed and validated within a simulated environment (Yu et al. 2018). This framework introduced a novel term into the loss function and utilised a curriculum learning strategy to effectively shape gait patterns. Another significant advancement was made in developing a learning method that enabled a robot to navigate stepping stones using curriculum learning, focusing on a physical robot model (Cassie), though this has yet to be validated outside of simulation (Xie et al. 2020a). Considering the practical implementation of this approach, significant efforts have been made to develop sim-to-real reference-free frameworks, and their potential has been further explored on physical robots. A notable example of such a framework accommodates various periodic motions, including walking, hopping, and galloping (Siekmann et al. 2021a). This framework employs periodic rewards to facilitate initial training within simulations before successfully transitioning to a physical robot. It has been further refined to adapt to diverse terrains and scenarios. For instance, robust blind walking on stairs was demonstrated through terrain randomisation techniques in Siekmann et al. (2021b). Additionally, the integration of a vision system has enhanced the framework’s ability to precisely determine foot locations (Duan et al. 2022a), thus enabling the robot to effectively navigate stepping stones (Duan et al. 2022b). Subsequent developments include the incorporation of a vision system equipped with height maps, leading to an end-to-end framework that more effectively generalises terrain information (Marum et al. 2023b). This approach to learning enables the exploration of novel solutions and strategies that might not be achievable through mere imitation of existing behaviours. However, the absence of reference guidance can render the learning process costly, time-consuming, and potentially infeasible for certain tasks. Moreover, the success of this method hinges critically on the design of the reward function, which presents significant challenges in specifying tasks such as jumping. Unlike end-to-end policies that directly map sensor inputs to motor outputs, hierarchical control schemes deconstruct locomotion challenges into discrete, manageable layers or stages of decision-making. Each layer within this structure is tasked with specific objectives, ranging from navigation to fundamental locomotion skills. This division not only enhances the framework’s flexibility but also simplifies the problem-solving process for each policy. The architecture of a hierarchical framework typically comprises two principal modules: an HL planner and an LL controller. This modular approach allows for the substitution of each component with either a model-based method or a learning-based policy, further enhancing adaptability and customisation to specific needs. Communication between the layers in a hierarchical framework is achieved through the transmission of commands. The HL planner sets abstract goals, which the LL controller translates into specific actions, such as calculating joint movements to follow a desired trajectory. In return, the robot sends sensor data back to the HL planner, enabling real-time adjustments. The tasks handled by different layers often operate on varying time scales, adding complexity to synchronising communication between the layers. Hierarchical frameworks can be classified into three distinct types based on the integration and function of their components: Deep planning hybrid scheme: This approach combines strategic, HL planning with dynamic LL execution, leveraging the strengths of both learning-based and traditional model-based methods. Feedback DRL control hybrid scheme: It focuses on integrating direct feedback control mechanisms with DRL, allowing for real-time adjustments and enhanced responsiveness. Learned hierarchy scheme: Entirely learning-driven, this scheme develops a layered decision-making hierarchy where each level is trained to optimise specific aspects of locomotion. These frameworks are illustrated in Fig. 3. Each type offers unique capabilities and exhibits distinct characteristics, albeit with limitations primarily due to the complexities involved in integrating diverse modules and their interactions. For a concise overview, Table 2 summarises the various frameworks, detailing their respective strengths, limitations, and primary characteristics. The subsequent sections will delve deeper into each of these frameworks, providing a thorough analysis of their operational mechanics and their application in real-world scenarios. In this scheme, robots are pre-equipped with the ability to execute basic locomotion skills such as walking, typically managed through model-based feedback controllers or interpretable methods. The addition of a learned HL layer focuses on strategic goals or the task space, enhancing locomotion capabilities and equipping the robot with advanced navigation abilities to effectively explore its environment. Several studies have demonstrated the integration of an HL planner policy with a model-based controller to achieve tasks in world space. A notable framework optimises task-space-level performance, eschewing direct joint-level and balancing considerations (Duan et al. 2021). This system combines a residual learning planner with an inverse dynamics controller, enabling precise control over task-space commands to joint-level actions, thereby improving velocity tracking, foot touchdown location, and height control. Further advancements include a hybrid framework that merges HZD-based residual deep planning with model-based regulators to correct errors in learned trajectories, showcasing robustness, training efficiency, and effective velocity tracking (Castillo et al. 2022). These frameworks have been successfully transferred from simulation to reality and validated on robots such as Cassie. However, the limitations imposed by residual learning constrained the agents’ capacity to explore a broader array of possibilities. Building on previous work (Castillo et al. 2022), a more efficient hybrid framework was developed, which learns from scratch without reliance on prior knowledge (Castillo et al. 2023). In this approach, a purely learning-based HL planner interacts with an LL controller using an Inverse Dynamics with Quadratic Programming formulation (ID-QP). This policy adeptly captures dynamic walking gaits through the use of reduced-order states and simplifies the learning trajectory. Demonstrating robustness and training efficiency, this framework has outperformed other models and was successfully generalised across various bipedal platforms, including Digit, Cassie, and RABBIT. In parallel, several research teams have focused on developing navigation and locomotion planners for humanoid robots, leveraging onboard visual perception and learned control strategies. Recent work (Gaspard et al. 2024) explored complex dynamic motion tasks such as playing soccer by integrating a learned policy with an online footstep planner that utilises weight positioning generation (WPG) to create a CoM trajectory. This configuration, coupled with a whole-body controller, enables dynamic activities like soccer shooting. Although these systems demonstrate promising coordination between perception, planning, and control, they remain limited in dynamic movement capability compared to full-sized humanoid robots, and thus primarily address navigation and task-level execution. Regarding generalisation, these frameworks have shown potential for adaptation across different types of bipedal robots with minimal adjustments, demonstrating advanced user command tracking (Castillo et al. 2023) and sophisticated navigation capabilities (Gaspard et al. 2024). However, limitations are evident, notably the absence of capabilities for executing more complex and dynamic motions, such as jumping. Furthermore, while these systems adeptly navigate complex terrains with obstacles, footstep planning alone is insufficient without concurrent enhancements to the robot’s overall locomotion capabilities. Moreover, the requisite communication between the two distinct layers of the hierarchical framework may introduce system complexities. Enhancing both navigation and dynamic locomotion capabilities within the HL planner remains a significant challenge. Hierarchical control scheme diagram. This figure illustrates a hierarchical control framework for a bipedal robot, comprising a basic scheme and three variations. (1) Basic scheme: The framework begins with a task command, followed by an HL planner and a LL controller, which ultimately drives the robot. Each module can be replaced with a learned policy, introducing adaptability across different control layers. (2) Variations (from left to right): a a deep planning hybrid scheme, in which the HL planner is learned; b a feedback DRL control hybrid scheme, with a learned LL controller; and c a learned hierarchical control scheme, where both layers are learned In contrast to the comprehensive approach of end-to-end policies discussed in Sect. 2, which excels in handling versatile locomotion skills and complex terrains with minimal inference time, the Feedback DRL Control Hybrid Scheme integrates DRL policies as LL controllers. These LL controllers, replacing traditional model-based feedback mechanisms, work in conjunction with HL planners that process terrain information, plan future walking paths, and maintain robust locomotion stability. For instance, gait libraries, which provide predefined movement references based on user commands, have been integrated into such frameworks (Green et al. 2021). Despite the structured approach of using gait libraries, their static nature offers limited adaptability to changing terrains, diminishing their effectiveness. A more dynamic approach involves online planning, which has shown greater adaptability and efficiency. One notable framework combines a conventional foot planner with an LL DRL policy (Singh et al. 2022), delivering targeted footsteps and directional guidance to the robot, thereby enabling responsive and varied walking commands. Moreover, HL controllers can provide additional feedback to LL policies, incorporating CoM or end-feet information, either from model-based methods or other conventional control strategies. However, this work has not yet been transferred from simulation to real-world applications. Later, a similar structure featuring an HL foot planner and an LL DRL-based policy was proposed (Wang et al. 2023). This strategy not only achieved a successful sim-to-real transfer but also enabled the robot to navigate omnidirectionally and avoid obstacles. A recent development has shown that focusing solely on foot placement might restrict the stability and adaptability of locomotion, particularly in complex maneuvers. A new framework integrates a model-based planner with a DRL feedback policy to enhance bipedal locomotion’s agility and versatility, displaying improved performance (Li et al. 2024b). This system employs a residual learning architecture, where the DRL policy’s outputs are merged with the planner’s directives before being relayed to the PD controller. This integrated approach not only concerns itself with foot placement but also generates comprehensive trajectories for trunk position, orientation, and ankle yaw angle, enabling the robot to perform a wide array of locomotion skills including walking, squatting, turning, and stair climbing. Compared to traditional model-based controllers, learned DRL policies provide a comprehensive closed-loop control strategy that does not rely on assumptions about terrain or robotic capabilities. These policies have demonstrated high efficiency in locomotion and accurate reference tracking (Jenelten et al. 2024). Despite their extensive capabilities, such policies generally require short inference time, making DRL a preferred approach in scenarios where robustness is paramount or computational resources on the robot are limited. Nonetheless, these learning algorithms often face challenges in environments characterised by sparse rewards, where suitable footholds like gaps or stepping stones are infrequent (Jenelten et al. 2024). Additionally, an HL planner can process critical data such as terrain variations or obstacles and generate precise target locations for feet or desired walking paths, instead of detailed terrain data, which can significantly expedite the training process (Wang et al. 2023). This capability effectively addresses the navigational limitations observed in end-to-end frameworks. Moreover, unlike the deep planning hybrid scheme where modifications post-policy establishment can be cumbersome, this hybrid scheme offers enhanced flexibility for on-the-fly adjustments. Despite the significant potential demonstrated by previous studies, integrating DRL-based controllers with sophisticated and complex HL planners still presents limitations compared to more integrated frameworks such as end-to-end and deep planning models. Specifically, complex HL model-based planners often require substantial computational resources to resolve problems, rely heavily on model assumptions, necessitate extensive training periods, demand large datasets for optimisation, and hinder rapid deployment and iterative enhancements (Jenelten et al. 2024). The Learned Hierarchy Framework merges a learned HL planner with an LL controller, focusing initially on refining LL policies to ensure balance and basic locomotion capabilities. Subsequently, an HL policy is developed to direct the robot towards specific targets, encapsulating a structured approach to robotic autonomy. The genesis of this framework was within a physics engine, aimed at validating its efficiency through simulation (Peng et al. 2017). In this setup, LL policies, informed by human motions or trajectories generated via TO, strive to track these trajectories as dictated by the HL planner while maintaining balance. An HL policy is then introduced, pre-trained with long-term task goals, to navigate the environment and identify optimal paths. This structure enabled sophisticated interactions such as guiding a biped to dribble a soccer ball towards a goal. The framework was later enhanced to include imitation learning (IL), facilitating the replication of dynamic human-like movements within the simulation environment (Peng et al. 2018). However, despite its structured and layered approach, which allows for the reuse of learned behaviours to achieve long-term objectives, these frameworks have been validated only in simulations. The interface designed manually between the HL planner and the LL controller sometimes leads to suboptimal behaviours, including stability issues like falling. Expanding the application of this framework, a sim-to-real strategy for a wheeled bipedal robot was proposed, focusing the LL policy on balance and position tracking, while the HL policy enhances safety by aiding in collision avoidance and making strategic decisions based on the orientation of subgoals (Zhu and Hayashibe 2023). To fully leverage its potential, HumanPlus has been developed as a versatile framework for humanoid robots, integrating hierarchical learning, multimodal perception, and real-world imitation (Fu et al. 2024). It employs a two-layer structure, where HIT learns from human demonstrations, trained on AMASS, and HST acts as an LL tracking controller. Additionally, binocular RGB vision input enhances perception, enabling precise loco-manipulation and dynamic locomotion tasks such as jumping, walking, folding clothes, and rearranging objects. This shadowing-based IL approach improves adaptability, making it a promising framework for transferring human-like skills to robots. Learning complex locomotion skills, particularly when incorporating navigation elements, presents a significant challenge in robotics. Decomposing these tasks into distinct locomotion and navigation components allows robots to tackle more intricate activities, such as dribbling a soccer ball (Peng et al. 2017). As discussed in the previous section, the benefits of integrating RL-based planners with RL-based controllers have been effectively demonstrated. This combination enables the framework to adeptly manage a diverse array of environments and tasks. Within such a framework, the HL policy is optimised for strategic planning and achieving specific goals. This optimisation allows for targeted enhancements depending on the tasks at hand. Moreover, the potential for continuous improvement and adaptation through further training ensures that the system can evolve over time, improving its efficiency and effectiveness in response to changing conditions or new objectives. Despite the theoretical advantages, the practical implementation of this type of sim-to-real application for bipedal robots remains largely unexplored. Additionally, the training process for each policy within the hierarchy demands considerable computational resources (Zhu and Hayashibe 2023). The intensive nature of this training can lead to a reliance on the simulation environment, potentially causing the system to overfit to specific scenarios and thereby fail to generalise to real-world conditions. This limitation highlights a significant hurdle that must be addressed to enhance the viability of learned hierarchy frameworks in practical applications. Besides, for the general hierarchical framework, the transition from simulation to real-world scenarios is challenging, particularly due to the complexities involved in coordinating two layers within the control hierarchy. Ensuring seamless communication and cooperation between the HL planner and LL controller is essential to avoid operational discrepancies. The primary challenges include: (1) Task division complexity–while the HL planner handles strategy and provides abstract goals, the LL Controller manages precise execution, necessitating careful coordination to avoid functional overlap and conflicts. (2) Effective communication–the HL’s abstract goals must be accurately interpreted and converted by the LL into real-time actions, especially in dynamic environments. (3) Task allocation–clear division of responsibilities between layers is crucial to prevent redundancy and ensure smooth system performance. The end-to-end and hierarchical frameworks detailed in Sects. 2 and 3 represent the state of the art in DRL-based bipedal locomotion, demonstrating remarkable capabilities on specific tasks. However, a substantial gap remains between these task-oriented successes and the broader goal of achieving generalisation and adaptability across diverse morphologies, tasks, and environments. Bridging this gap requires more than incremental improvements–it demands the establishment of a unified framework that consolidates interfaces, training conventions, and evaluation protocols to systematically address the underlying limitations of current DRL pipelines. As outlined in the following sections, the core challenges underlying this gap can be grouped into three interrelated aspects. At a foundational level, a primary difficulty involves the limitations and challenges in achieving both generalisation and precision (Sect. 4.1). This is further complicated by the practical barrier of the sim-to-real gap in transferring policies from simulation to physical robots (Sect. 4.2). Ultimately, these issues culminate in the critical challenges of ensuring safety and interpretability for robust deployment in real-world, safety-critical situations (Sect. 4.3). A central challenge in applying DRL to bipedal locomotion is the need to simultaneously achieve high generalisation across diverse skills and traverse all kinds of terrains, and high precision in specific tasks. This remains a fundamental obstacle to realising truly unified and capable frameworks. This capability gap is evident in the current literature. Many approaches excel at generalisation, demonstrating policies that enable versatile skills such as walking and jumping (Li et al. 2021, 2024a) and can transfer to different terrains (Siekmann et al. 2021b; Duan et al. 2022b; Radosavovic et al. 2024a). However, these generalised policies often lack the fidelity required for high-precision tasks such as exact foot placement (Singh et al. 2022; Duan et al. 2022a, b) or maintaining a specific velocity with minimal error (van Marum et al. 2023a). Conversely, controllers specialised for narrow domains can achieve exceptional precision, as seen in jumping to a precise target (Li et al. 2023), yet they cannot generalise these capabilities to a broader range of tasks. Thus, the development of a single unified framework that concurrently exhibits both broad competency and high fidelity remains largely unresolved. This difficulty in uniting generalisation and precision is not arbitrary but stems from several key limitations inherent in current DRL paradigms, whether related to framework design, task formulation, or the training process itself: Limited terrain and gait patterns: The failure to generalise is often a direct result of training on insufficiently diverse environments or with a restricted set of behaviours. Models trained on limited terrain are brittle when faced with novel surfaces, while a limited gait pattern library prevents adaptation to tasks requiring new motor skills. Poor command tracking: The learning signals for generalisation and precision are often in direct conflict. Generalisation requires permissive signals that allow the robot to adapt to varied terrains or recover from perturbations, whereas precision demands restrictive signals that minimise command-tracking error. Faced with these opposing objectives, a single policy is forced to compromise, which often leads to poor command tracking and the sacrifice of adaptability in favour of rigid, high-fidelity execution (Tao et al. 2023; Li et al. 2024a). Inefficient sampling: Underpinning the difficulty of solving both problems simultaneously is the inefficient sampling of most DRL algorithms (Arulkumaran et al. 2017; Schulman et al. 2017; Aydogmus and Yilmaz 2023). This problem is severely exacerbated in tasks that depend on sparse rewards, where feedback is infrequent and often only supports the success of the final task. Consequently, the immense amount of data required for an agent to explore, discover a successful strategy, and then refine it for both a diverse skill set for generalisation and the fine-grained control needed for precision is often computationally prohibitive, motivating massive parallel simulation merely to make training tractable (Rudin et al. 2022; Heess et al. 2017; Peng et al. 2017, 2018). High-quality data scarcity: As highlighted in Sect. 2.1.2, the scarcity of high-quality demonstrations is a key bottleneck. Such data provide essential guidance for DRL, enabling policies to learn physically feasible and natural-looking gaits while avoiding unsafe exploration (Peng et al. 2017, 2018; Yang et al. 2020). This scarcity stems from the difficulty of transferring scalable human data due to embodiment mismatch (Ayusawa and Yoshida 2017; Penco et al. 2018; Fu et al. 2024), while generating feasible synthetic data via trajectory optimisation is often computationally expensive (Herzog et al. 2016; Li et al. 2019). These fundamental limitations give rise to common algorithmic challenges, such as the need for complex reward engineering, and are directly reflected in the design of the field’s dominant control architectures. End-to-end frameworks attempt a holistic solution, learning a single monolithic policy that must implicitly resolve all challenges simultaneously. While this approach can yield highly versatile and dynamic behaviours (Radosavovic et al. 2024a), it directly confronts the immense difficulty of exploration from sparse rewards and the struggle of reconciling conflicting training objectives within unstable system dynamics. This often results in a lack of the fidelity and precision that hierarchical systems can enforce (Li et al. 2024a). Conversely, hierarchical frameworks are a direct architectural response to the lack of skill compositionality. By employing a “divide and conquer” strategy, they use an HL policy to sequence a library of LL, often model-based, controllers. This structure enforces precision and manages complex dynamics at a lower level (Li et al. 2019; Duan et al. 2022a; Wang et al. 2023). However, this results in a brittle system, imposing a strong prior that constrains the policy’s freedom and limits its ability to generalise to situations not anticipated by the handcrafted controller (Singh et al. 2022). Another challenge hindering the deployment of DRL policies on bipedal robots is the sim-to-real gap. This refers to the significant discrepancy between a policy’s performance in a physics simulator and its performance on actual hardware. This gap is a critical obstacle because training directly on physical robots is often impractical. The millions of environmental interactions required for DRL would lead to accelerated mechanical wear, a risk of catastrophic failure, and require constant human supervision. While simulation offers a safe and efficient alternative, the ultimate goal of “zero-shot” transfer, where a policy works perfectly without any real-world fine-tuning, is rarely achieved. A large body of research validates impressive locomotion skills purely within simulation, without attempting transfer to a physical system (Peng et al. 2017, 2018; Meduri et al. 2021; Merel et al. 2017; Tao et al. 2023). Even when transfer is successful, it often comes with compromises. Many successful transfers are not truly “zero-shot” and rely on a subsequent phase of extensive real-world fine-tuning or manual parameter tuning (Yu et al. 2019; Xie et al. 2020b). In cases where policies do transfer without fine-tuning, they often exhibit a noticeable degradation in performance, where the robustness and agility seen in simulation are significantly lower in the real world (Siekmann et al. 2021b; Duan et al. 2022b; Park et al. 2020). This gap is caused by unavoidable differences between the virtual and physical worlds, which are especially problematic for dynamically unstable bipedal robots. Robot dynamics modelling and actuation: Simulators struggle to replicate the complex dynamics of a physical bipedal robot, whose inherent instability makes it particularly sensitive to modelling errors. Factors such as motor friction, gear backlash, and precise link inertia are often simplified. Contact and terrain modelling: Accurately simulating intermittent foot–ground contact is extremely difficult. A mismatch between simulated and real-world friction or surface properties can cause unexpected slips or bounces, leading to loss of balance. Sensing and state estimation: A simulated robot has access to perfect, noise-free state information. In the real world, these states must be estimated from noisy sensors such as IMUs and joint encoders (Xie et al. 2020b; Yu et al. 2019). For a bipedal robot, precise state estimation is critical for maintaining balance. Simulators such as Isaac Gym (Rudin et al. 2022), RoboCup3D (Birk et al. 2003), OpenAI Gym (Brockman et al. 2016), and MuJoCo (Todorov et al. 2012), detailed in Appendix B, are widely used to train policies that closely mimic real-world physical conditions. These platforms use full-order dynamics to better represent the complex interactions robots face, and numerous sim-to-real frameworks (Xie et al. 2020b; Kumar et al. 2022; Singh et al. 2023) have demonstrated efficient and high-performance results. Despite these advancements, a significant gap persists between simulation and reality, exacerbated by the approximations made in simulation and the unpredictability of physical environments. Beyond performance metrics such as agility and robustness, the practical deployment of bipedal robots in human-centric environments is fundamentally contingent upon safety (Tong et al. 2024; Reher and Ames 2021; Carpentier and Wieber 2021). This includes ensuring the robot’s own integrity to prevent costly damage, as well as guaranteeing the safety of the surrounding environment and any humans within it. While many existing frameworks have demonstrated impressive locomotion skills, they often prioritise performance over these safety considerations. This creates a critical barrier that separates success in controlled laboratory settings from reliable operation in the unpredictable real world. Blind locomotion policies: Many current frameworks rely solely on internal sensors (proprioception) such as joint angles and IMU data (Siekmann et al. 2020, 2021a, b), creating a major safety risk. Lacking external perception, these robots cannot anticipate obstacles, slopes, or slippery surfaces, making them purely reactive and highly prone to failure. Despite these significant safety drawbacks, this approach is often adopted for several reasons: omitting vision simplifies the control problem to pure motor skills and avoids the computational cost of real-time visual processing. Moreover, since robust blind locomotion has already been demonstrated, vision is often treated as a component used to enhance task-specific precision (Marum et al. 2023b) or path planning (LobosspsTsunekawa et al. 2018), rather than a core requirement for basic stability. Lack of physical constraint satisfaction: Many DRL frameworks lack built-in mechanisms to guarantee physical constraint satisfaction. This gap has motivated constrained or safety-aware DRL that enforces limits via the learning objective or auxiliary safety modules–for example, Safe-RL on humanoids (García and Shafie 2020), hybrid DRL with identified low-dimensional safety models (Li et al. 2022), footstep-constrained DRL policies (Duan et al. 2022a), and reactive DRL steppers operating under feasibility constraints on uneven terrain (Meduri et al. 2021). This limitation makes it difficult to prevent the robot from exceeding joint limits, applying excessive torques, or causing self-collisions, particularly when reacting to unexpected events. This is a key area where constrained RL could be applied. In summary, the pursuit of performance in DRL has often sidelined critical safety issues. The prevalence of blind policies that cannot anticipate environmental hazards, combined with the lack of inherent mechanisms to enforce physical constraints, creates significant risk and hinders real-world deployment. While these challenges are considerable, they also define a clear path forward. The following section on Future Directions and Opportunities explores specific research avenues, such as vision-based learning and safe reinforcement learning, aimed at overcoming these safety barriers and enabling the development of truly robust and reliable bipedal robots . Towards a unified framework: This figure illustrates the logical progression from current DRL frameworks to future unified systems. It identifies the current limitations of existing end-to-end and hierarchical approaches, which motivate the exploration of specific Future Pathways. These pathways inform the design of two proposed conceptual models (i) Multi-Layered Adaptive Model (MLAM) and (ii) Bipedal Foundation Model (BFM) which represent potential blueprints for achieving a generalist, unified framework Following the analysis of the surveyed frameworks and their limitations, this section outlines a path forward for DRL-based bipedal locomotion by exploring both direct research avenues and emerging opportunities.A consolidated overview of the current limitations, challenging gaps, future pathways, and conceptual models is presented in Fig. 4. We begin in Sect. 5.1 by detailing research directions that directly respond to the challenges identified in Sect. 4. Building on this foundation, Sect. 5.2 broadens the scope to explore synergistic opportunities from related fields, such as loco-manipulation and the application of foundation models. These discussions culminate in Sect. 5.3, where we propose two conceptual models for a unified framework that represent the future evolution of the end-to-end and hierarchical paradigms. In relation to the research question introduced in Sect. 1, progress in DRL-based bipedal locomotion should be assessed not only through conventional metrics such as reward and success rate but also by broader system-level measures. These include generalisation breadth (across skills, terrains, and morphologies), precision in fidelity-critical tasks (e.g., command-tracking error and foot-placement accuracy), safety and constraint compliance (joint, torque, and contact feasibility), and efficiency or deployability (sample efficiency and on-robot inference latency). These dimensions build directly upon the challenges outlined in Sect. 4 and together define the key pathways for advancing bipedal locomotion. The following subsections elaborate on these pathways, each addressing one or more of the above aspects to guide progress towards more generalisable and robust control systems. A fundamental goal for the next generation of bipedal robots is to move beyond the paradigm of single-task specialisation and towards versatile skill learning (Radosavovic et al. 2024a, b; Li et al. 2024a). This research direction focuses on enabling robots to acquire, adapt, and deploy a broad and varied repertoire of motor skills, allowing them to handle unforeseen situations and operate effectively in unstructured environments. To achieve such versatility, researchers are pursuing several HL pathways, which can be broadly categorised into structured and holistic approaches. The structured approach focuses on explicit decomposition. A prominent example is hierarchical learning, where success depends on appropriately dividing responsibilities; for instance, an HL planner generates reference trajectories, while an LL DRL controller executes them robustly (Fu et al. 2024; Castillo et al. 2023), as shown in Sect. 3. Similarly, skill composition employs a supervisor policy to select and sequence LL experts to solve complex tasks (Peng et al. 2018). A related technique, knowledge distillation, leverages experts by first training them and then distilling their capabilities into a single, compact generalist policy (Huang et al. 2024). The goal of versatile skill learning is to enable bipedal robots to traverse challenging, human-centric environments where their unique form offers an advantage. Validating capabilities on such terrains serves a crucial dual purpose. It tests a policy’s generalisation across diverse settings, including stairs and uneven ground, which is essential for real-world integration (Siekmann et al. 2021b; van Marum et al. 2023a; Radosavovic et al. 2024a). More critically, it benchmarks precision on treacherous paths such as stepping stones, which demand exact foot placement (Duan et al. 2022b; Li and Nguyen 2023; Meduri et al. 2021). These environments are the ultimate test of both a robot’s skill repertoire and its control fidelity. As detailed in Sect. 4, while DRL has unlocked impressive capabilities in bipedal locomotion, its reliance on training from scratch leads to significant sample inefficiency (Arulkumaran et al. 2017; Siekmann et al. 2021a). Addressing this bottleneck is a crucial research frontier that calls for both more efficient algorithms and more robust reward designs. To mitigate sample inefficiency for complex skills, several research pathways are being actively explored. A primary strategy is to leverage prior data rather than learning entirely from scratch. Leveraging prior knowledge provides strong guidance and reduces unsafe exploration by anchoring policies to feasible motion patterns (Peng et al. 2018; Xie et al. 2018; Fu et al. 2024). Curriculum learning further organises training from simple to progressively harder tasks, for example standing and balancing before walking and running, which improves stability and convergence (Xie et al. 2020a; Rodriguez and Behnke 2021; Wang et al. 2023). Complementing advances in algorithms is the design of effective and robust rewards. Manual reward engineering remains a significant obstacle, since small choices can induce reward hacking and lengthy tuning cycles (Heess et al. 2017; Peng et al. 2018). Phase-aware objectives are well established for cyclic gaits such as walking (Siekmann et al. 2021a), whereas reward design for non-periodic skills such as jumping is less standardised and often task specific (Li et al. 2023). Promising directions reduce manual effort by adding higher-level guidance, including event-based terms, goal-conditioned objectives, and kinematic reference tracking (Duan et al. 2022a; Taylor et al. 2021; Yang et al. 2019b). Alternatively, learning rewards from data through inverse methods and related approaches aims to replace hand-crafted objectives with implicit ones inferred from demonstrations (Ho and Ermon 2016). Together, these directions seek to minimise skill-specific tuning and improve the transferability and reliability of learned locomotion policies. As human-like agents, bipedal robots—especially humanoids—have the unique advantage of a morphology that is similar to our own. This presents a significant opportunity: the potential to learn from vast libraries of human motion data. While large-scale datasets such as AMASS (Mahmood et al. 2019) and Motion-X (Lin et al. 2024) provide a wealth of such data, they are inherently human-centric and cannot be used directly, requiring substantial retargeting effort (Cheng et al. 2024). Therefore, motion retargeting emerges as a critical component to bridge this gap. The challenge of this pathway is not merely to transfer human movements to the robot, but to generate trajectories that are both high in stylistic fidelity and physically feasible, adhering to the robot’s unique dynamics and constraints. Successfully developing these retargeting methods provides a scalable solution for accessing the data needed to train the natural and versatile generalist policies of the future. Strategies to bridge the sim-to-real gap generally follow two main philosophies. The first aims to train policies robust enough to tolerate the inevitable mismatch between simulation and reality, while the second focuses on minimising the gap itself by making the simulator a more faithful replica of the physical world. The first approach seeks to reduce the discrepancy by improving the simulation’s fidelity. This is often achieved through system identification (SI), where real-world robot data are used to fine-tune the simulator’s parameters to create a more accurate “digital twin” (Yu et al. 2019; Masuda and Takahashi 2023). This can include explicitly learning complex actuator dynamics to model the motors’ behaviour (Yu et al. 2019; Hwangbo et al. 2019). Other methods, such as designing specialised feedback controllers (Castillo et al. 2021), also contribute by making the system less sensitive to residual modelling errors. In contrast, the second philosophy accepts that simulations will always be imperfect and instead focuses on creating highly adaptive, robust policies. The primary method here is DR, which forces a policy to generalise by training it across a wide range of simulated physical variations. Other various ways, such as through end-to-end training that uses measurement histories to adapt online as in RMA (Kumar et al. 2022), or via policy distillation, where a privileged “teacher” guides a “student” policy (van Marum et al. 2023a) to have a knowledge of unknown information like friction . Additionally, techniques like adversarial motion priors (Zhang et al. 2024; Tang et al. 2023) are used to ensure the learned behaviours are not just robust but also physically plausible. Looking ahead, the ultimate goal remains achieving reliable zero-shot transfer, where no real-world fine-tuning is needed. Progress will depend on the co-development of higher-fidelity simulations, improved hardware, and more robust control policies inherently capable of handling real-world unpredictability. The synergy of these advancements will be crucial in finally closing the sim-to-real gap. Integrating exteroceptive sensors such as cameras and LiDAR enables bipedal robots to proactively plan footsteps, avoid obstacles, and adapt to upcoming terrain. This shift from reactive to anticipatory control is essential for navigating unstructured real-world environments. The vision-based pathway is a human-inspired approach using RGB and depth cameras to capture rich data on colour, texture, and object appearance (Duan et al. 2022b; Marum et al. 2023b; Wang et al. 2023). In contrast, LiDAR is an active sensing method that generates precise 3D point clouds of the terrain. While vision provides richer data but is sensitive to lighting, LiDAR offers robust geometric measurements without visual detail. Based on this sensory data, current research is exploring two primary pathways for processing perceptual information for control. The first involves creating an intermediate geometric representation, such as a height map from scanners (Marum et al. 2023b). This provides the policy with structured topographical data for effective footstep planning. The second is a more end-to-end approach, which utilises direct vision inputs such as RGB or depth images as inputs to the RL policy for real-time decision-making (LobosspsTsunekawa et al. 2018; Byravan et al. 2023). The former offers interpretability, while the latter promises more nuanced, reactive behaviours learned directly from raw perception. Future progress requires advancing both pathways: building richer, semantic world representations and improving the efficiency of direct perception-to-action policies. Solving the underlying challenges of real-time processing and the perceptual sim-to-real gap will be crucial for enabling truly adaptive locomotion in complex, real-world scenarios. While the previously discussed pathways focus on enhancing a robot’s capabilities, a parallel and equally critical frontier is ensuring that these capabilities are exercised safely and reliably. To formally integrate safety, modern approaches can be grouped by how they handle constraints: soft constraints that guide the policy through costs and hard constraints that strictly limit actions (García and Shafie 2020; Li et al. 2022). Soft constraints encourage desirable behaviour and penalise undesirable behaviour without forbidding it. They are well suited to preferences or efficiency goals, for example minimising energy use, limiting peak torques, or promoting smooth motion (García and Shafie 2020). Hard constraints are inviolable rules that prevent catastrophic failures. They are essential for enforcing physical limits and protecting the robot and its environment, for example footstep feasibility, contact timing, joint and torque bounds, and collision avoidance (Duan et al. 2022a; Castillo et al. 2021). A practical way to enforce hard constraints is to use safety filters or shields grounded in control theory, such as control barrier functions and related template model checks (Nguyen et al. 2016). In practice, a robust and trustworthy bipedal robot will likely combine both ideas. Soft constraints help a policy learn efficient and natural gaits, while hard constraints guarantee that it will not take catastrophic actions. This combination supports the transition from systems that are merely capable in laboratory settings to agents that are reliable, predictable, and safe for real-world deployment. The recent rise of Foundation Models (FMs), such as Large Language Models (LLMs) and Vision Language Models (VLMs), presents a transformative opportunity for bipedal locomotion. Their powerful reasoning capabilities are unlocking new approaches that go beyond traditional control methods, primarily by enabling sophisticated HL task planning and by providing novel solutions to shape the learning process itself, particularly in automated reward design. As HL planners, FMs provide a reasoning engine that can bridge the gap between abstract human goals and LL motor execution. They can interpret complex linguistic commands or visual scenes and decompose them into a sequence of simpler, actionable commands for an LL policy to follow. This has been demonstrated effectively in legged robotics, where VLMs process raw sensory data to pass structured commands to motor controllers (Chen et al. 2024), creating a seamless link between strategic planning and physical action. Furthermore, FMs create a significant opportunity to overcome one of the most persistent bottlenecks in DRL: reward design. Instead of tedious manual tuning, LLMs can dynamically generate or refine reward functions based on linguistic descriptions of task success. Research has shown that LLMs can translate human feedback into reward adjustments (Kumar et al. 2023) or even autonomously adjust rewards and control strategies to self-optimise for diverse terrains (Yao et al. 2024), drastically reducing human intervention. The foremost opportunity lies in the deeper synergy between these roles. The integration of the HL symbolic reasoning of FMs with the LL, real-time control of DRL could create a new class of highly adaptive and flexible robots. As this rapidly evolving field progresses, as reviewed in (Firoozi et al. 2023), we may see a paradigm shift towards more autonomous, self-learning humanoid robots that can understand, reason about, and adapt to the world with minimal human intervention. While achieving stable locomotion is a foundational challenge, a bipedal robot with only a lower body has limited practical utility, as it cannot physically interact with its environment. The evolution of modern humanoids to include complex upper bodies is a critical advancement that has unlocked the opportunity for loco-manipulation—the dynamic integration of movement and object interaction. Achieving such full-body coordination is now a key benchmark for creating truly adaptable systems, with tasks ranging from climbing and using tools to carrying objects while navigating, as highlighted by initiatives like the DARPA Robotics Challenge (Atkeson et al. 2015). However, realising this opportunity is a significant challenge. Early studies, such as a ‘box transportation’ framework (Dao et al. 2023), often rely on inefficient, multi-policy solutions that lack visual perception. Furthermore, dynamically interacting with mobile objects like scooters or balls introduces even greater complexity (Baltes et al. 2023; Haarnoja et al. 2024). These difficulties create significant research opportunities. One such opportunity lies in exploring hierarchical control approaches. By decomposing tasks into multiple layers, this method allows for precise, modular control over different components, which can enhance stability and adaptability to environmental variations (Castillo et al. 2023). Alternatively, a further research opportunity is the development of end-to-end learning frameworks, which offer a more scalable solution. Using techniques like curriculum learning and imitation from human motion-capture data (Rodriguez and Behnke 2021; Wang et al. 2023; Li et al. 2024a; Seo et al. 2023; Zhang et al. 2024; Cheng et al. 2024), a single, unified policy can be trained to handle diverse loco-manipulation tasks, representing a promising avenue of research for creating truly versatile agents. While DRL remains an emerging technology in bipedal robotics, it has firmly established its presence in the realm of quadruped robots, another category of legged systems. The diversity of frameworks developed for quadrupeds ranges from end-to-end, model-based RL designed for training in real-world scenarios, where unpredictable dynamics often prevail (Smith et al. 2023; Wu et al. 2023), to systems that include the modelling of deformable terrain to enhance locomotion over compliant surfaces (Choi et al. 2023). Furthermore, dynamic quadruped models facilitate highly adaptable policies (Feng et al. 2023; Humphreys and Zhou 2024), and sophisticated acrobatic motions are achieved through IL (Fuchioka et al. 2023). The domain of quadruped DRL has also seen significant advancements in complex hierarchical frameworks that integrate vision-based systems. To date, two primary versions of such hierarchical frameworks have been developed: one where a deep-planning module is paired with model-based control (Gangapurwala et al. 2022) within a deep-planning hybrid scheme, and another that combines model-based planning with LL DRL control (Jenelten et al. 2024; Kang et al. 2023) within a feedback DRL control hybrid scheme. The latter has shown substantial efficacy; it employs an MPC to generate reference motions, which are then followed by an LL feedback DRL policy. Additionally, the Terrain-aware Motion Generation for Legged Robots module (Jenelten et al. 2022) enhances the MPC and DRL policy by providing terrain height maps for effective foothold placements across diverse environments, including those not encountered during training. However, similar hierarchical hybrid control schemes have not been thoroughly investigated within the field of bipedal locomotion. Quadruped DRL frameworks are predominantly designed to navigate complex terrains, but efforts to extend their capabilities to other tasks are under way. These include mimicking real animals through motion-capture data and IL (Peng et al. 2020; Yin et al. 2021), as well as augmenting quadrupeds with manipulation abilities. This is achieved either by adding a manipulator (Ma et al. 2022; Fu et al. 2023) or by using the robots’ legs (Arm et al. 2024). Notably, the research presented in Fu et al. (2023) demonstrates that loco-manipulation tasks can be effectively managed using a single, unified, end-to-end framework. Despite the progress in quadruped DRL, similar advancements have been limited for bipedal robots, particularly in loco-manipulation tasks and vision-based DRL frameworks; a combination of their inherent instability, lack of accessibility to researchers, and high mechanical complexity can be attributed to this disparity between quadruped and bipedal robots. Establishing a unified framework could bridge this gap—an essential step, given the integral role of bipedal robots with upper bodies in developing fully functional humanoid systems. Moreover, the potential of hybrid frameworks that combine model-based and DRL-based methods in bipedal robots remains largely untapped. Motivated by our survey and the current state of the art, we propose two conceptual models, intended as reference designs, towards a unified locomotion framework. They build on end-to-end and hierarchical paradigms and offer complementary routes to scalable, generalisable architectures, rather than fully realised systems. Bipedal Foundation Models (BFMs): large-scale, pre-trained models that map perception directly to action through representation learning. Trained on diverse data across tasks and embodiments, BFMs aim to enable generalist locomotion control by supporting rapid adaptation via fine-tuning. Multi-Layer Adaptive Models (MLAMs): modular, hierarchical architectures that span from HL planning to LL control, with each layer producing interpretable intermediate outputs. MLAMs are designed to integrate, substitute, and coordinate diverse policies, enabling flexible and adaptive responses across tasks and embodiments. In the following sections, we will analyse each of these conceptual models in detail, evaluating their respective strengths and challenges in the pursuit of a unified framework. Inspired by robot foundation models (RFMs) (Firoozi et al. 2023; Hu et al. 2023), we propose the concept of BFMs as large-scale, general-purpose models tailored for bipedal locomotion. A BFM would be a large-scale model pre-trained specifically to learn the shared motion priors of dynamic balance and movement across a vast range of bipedal tasks and physical embodiments. Unlike traditional policies trained from scratch, a BFM would provide a foundational understanding of stable locomotion, directly tackling the core difficulties that make bipeds distinct from other robots. Architecturally, we envision such a model comprising a multi-modal embedding module, a shared backbone like a transformer, and an action decoder, drawing inspiration from models like RT-2 (Brohan et al. 2023). The proposed BFM paradigm would operate in two stages. First, IL on diverse datasets would establish the generalisable foundation. Second, DRL would be repurposed as an efficient fine-tuning mechanism to adapt these general priors to the specific, and often unforgiving, dynamics of a physical robot. The potential of this approach is highlighted by recent works, with frameworks like FLaRe (Hu et al. 2024) enhancing generalisation for long-horizon tasks, MOTO (Rafailov et al. 2023) enabling effective offline-to-online adaptation from images, and AdA (Bauer et al. 2023) demonstrating in-context adaptation to novel environments. Collectively, these approaches underscore DRL not only as a simple tuning tool but as a central mechanism for grounding abstract foundation model priors into executable, platform-specific control policies. However, realising the BFM concept for bipeds presents significant challenges. The DRL fine-tuning stage can be costly and risky on physical hardware, and policies may overfit to narrow dynamics or catastrophically forget the generalisable priors acquired during pre-training (Hu et al. 2024; Bauer et al. 2023). Furthermore, as detailed in Sects. 4.1 and 5.1.4, the scarcity of high-quality, large-scale data remains a fundamental bottleneck, as most existing datasets are human-centric and require significant adaptation before they can be used. As a complementary path to BFMs, we propose the concept of MLAMs. Rather than relying on large-scale pre-training, this conceptual framework would adopt a modular, hierarchical approach. The idea is to extend conventional hierarchical frameworks (discussed in Sect. 3) with explicitly adaptive layers, allowing for the dynamic composition of specialised policies. The core principle of this concept would be modularity, enabling each layer to be independently optimised or replaced and providing interpretable outputs at each stage. A key feature we envision for MLAMs is their capacity to dynamically compose adaptive modules for each control tier. Each layer processes context-specific inputs and outputs interpretable commands. The HL reasoning layer leverages large pre-trained models such as LLMs and VLMs (Irpan et al. 2022; Liang et al. 2022) to parse commands into sub-tasks. For instance, Vision–Language Model Predictive Control (Chen et al. 2024) has been effective in quadrupedal robots, integrating linguistic and visual inputs to optimise HL task planning. By leveraging LLMs, a unified framework could seamlessly bridge HL strategic planning with detailed task execution. The mid-level planner selects or synthesises motions via learned motion libraries (Green et al. 2021; Li et al. 2021) or DRL-based planners (Kasaei et al. 2021). The LL control layer comprises various modular controllers, dynamically selected and composed based on task-specific demands. These include locomotion primitives like walking and climbing (Ouyang et al. 2024), adaptive tracking controllers for whole-body tracking (Fu et al. 2024), and imitation-based skills such as kicking and dancing (Peng et al. 2018), by utilising RL, IL, or model-based methods. This layered architecture is exemplified by recent work on quadrupedal robots, where LLMs are used to translate HL commands into robust and flexible real-world behaviours (Ouyang et al. 2024). However, realising the MLAM concept would introduce challenges distinct from BFMs. Such a framework would depend heavily on real-time multi-modal perception, which complicates data alignment across layers with differing timescales and abstraction levels (Jenelten et al. 2022). Additionally, the computational latency incurred by HL reasoning modules like LLMs (Ouyang et al. 2024) would pose limitations for tasks needing rapid reactions. Despite significant progress in DRL for robotics, a substantial gap remains between current achievements and the development of a unified framework capable of efficiently handling a wide range of complex tasks. DRL research is generally divided into two main control schemes: end-to-end and hierarchical frameworks. End-to-end frameworks have demonstrated success in handling diverse locomotion skills (Li et al. 2024a), climbing stairs (Siekmann et al. 2021b), and navigating challenging terrains such as stepping stones (Duan et al. 2022b). Meanwhile, hierarchical frameworks provide enhanced capabilities, particularly in managing both locomotion and navigation tasks simultaneously. Each framework contributes unique strengths to the pursuit of a unified framework. End-to-end approaches simplify control by directly mapping inputs to outputs, while reference-based and reference-free learning methods provide the versatility required for robots to acquire diverse locomotion skills. In contrast, hierarchical frameworks improve flexibility by structuring control into layers, allowing modular task decomposition and hybrid strategies. While DRL has enabled remarkable progress, our survey concludes that current frameworks face key limitations, including the tension between multi-skill generalisation and task-specific precision, the persistent sim-to-real gap, and critical safety concerns. To address these challenges, this survey synthesises specific pathways for future research and identifies key opportunities for cross-pollination from related fields, such as FMs, loco-manipulation, and quadrupedal robotics. These insights culminate in our proposal of two conceptual frameworks: the BFMs, extending the end-to-end paradigm, and the MLAMs, evolving from the hierarchical approach, which together offer distinct blueprints for the next generation of generalist bipedal controllers. No datasets were generated or analysed during the current study. 6+ Hours Live Autonomous Robot Demo (2024). https://www.youtube.com/watch?v=Ke468Mv8ldM Arm P, Mittal M, Kolvenbach H, Hutter M (2024) Pedipulate: Enabling manipulation skills using a quadruped robot’s leg. In: IEEE Conference on Robotics and Automation Arulkumaran K, Deisenroth MP, Brundage M, Bharath AA (2017) Deep reinforcement learning: A brief survey. IEEE Signal Process Mag 34:26–38. https://doi.org/10.1109/MSP.2017.2743240 Article Google Scholar Atkeson CG, Babu BPW, Banerjee N, Berenson D, Bove CP, Cui X, DeDonato M, Du R, Feng S, Franklin P, et al (2015) No falls, no resets: Reliable humanoid behavior in the darpa robotics challenge. In: IEEE-RAS 15th International Conference on Humanoid Robot, pp 623–630 Aydogmus O, Yilmaz M (2023) Comparative analysis of reinforcement learning algorithms for bipedal robot locomotion. IEEE Access 12:7490–7499 Article Google Scholar Ayusawa K, Yoshida E (2017) Motion retargeting for humanoid robots based on simultaneous morphing parameter identification and motion optimization. IEEE Trans Rob 33(6):1343–1357. https://doi.org/10.1109/TRO.2017.2752711 Article Google Scholar Baltes J, Christmann G, Saeedvand S (2023) A deep reinforcement learning algorithm to control a two-wheeled scooter with a humanoid robot. Eng Appl Artif Intell 126:106941 Article Google Scholar Bauer J, Baumli K, Behbahani F, Bhoopchand A, Bradley-Schmieg N, Chang M, Clay N, Collister A, Dasagi V, Gonzalez L, Gregor K, Hughes E, Kashem S, Loks-Thompson M, Openshaw H, Parker-Holder J, Pathak S, Perez-Nieves N, Rakicevic N, Rocktäschel T, Schroecker Y, Singh S, Sygnowski J, Tuyls K, York S, Zacherl A, Zhang L (2023) Human-timescale adaptation in an open-ended task space. In: Proceedings of the 40th International Conference on Machine Learning Bingjing G, Jianhai H, Xiangpan L, Lin Y (2019) Human-robot interactive control based on reinforcement learning for gait rehabilitation training robot. Int J Adv Rob Syst 16:1729881419839584 Article Google Scholar Birk A, Coradeschi S, Tadokoro S (2003) RoboCup 2001: Robot Soccer World Cup V vol. 2377 Bogue R (2015) Underwater robots: a review of technologies and applications. Ind Robot 42:186–191 Article Google Scholar Brockman G, Cheung V, Pettersson L, Schneider J, Schulman J, Tang J, Zaremba W (2016) Openai gym. arXiv preprint arXiv:1606.01540 Brohan A, Brown N,Carbajal J, Chebotar Y, Chen X, Choromanski K, Ding T, Driess D, Dubey A, Finn C, et al (2023) RT-2: Vision-language-action models transfer web knowledge to robotic control.arXiv preprint https://arxiv.org/abs/2307.15818 Byravan A, Humplik J, Hasenclever L, Brussee A, Nori F, Haarnoja T, Moran B, Bohez S, Sadeghi F, Vujatovic B, et al (2023) NerRfF2real: Sim2real transfer of vision-guided bipedal motion skills using neural radiance fields. In: IEEE International Conference on Robotics and Automation, pp. 9362–9369 Carpentier J, Wieber P-B (2021) Recent progress in legged robots locomotion control. Curr Robot Reports 2:231–238. https://doi.org/10.1007/s43154-021-00059-0 Article Google Scholar Castillo GA, Weng B, Zhang W, Hereid A (2021) Robust feedback motion policy design using reinforcement learning on a 3D digit bipedal robot. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 5136–5143. https://doi.org/10.1109/IROS51168.2021.9636467 Castillo GA, Weng B, Zhang W, Hereid A (2022) Reinforcement learning-based cascade motion policy design for robust 3dD bipedal locomotion. IEEE Access 10:20135–20148. https://doi.org/10.1109/ACCESS.2022.3151771 Article Google Scholar Castillo GA, Weng B, Yang S, Zhang W, Hereid A (2023) Template model inspired task space learning for robust bipedal locomotion. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 8582–8589. https://doi.org/10.1109/IROS55552.2023.10341263 Chen AS, Lessing AM, Tang A, Chada G, Smith L, Levine S, Finn C (2024) Commonsense reasoning for legged robot adaptation with vision-language models. arXiv preprint arXiv:2407.02666 Cheng X, Ji Y, Chen J, Yang R, Yang G, Wang X (2024) Expressive whole-body control for humanoid robots. arXiv preprint arXiv:2402.16796 Choi S, Ji G, Park J, Kim H, Mun J, Lee JH, Hwangbo J (2023) Learning quadrupedal locomotion on deformable terrain. Sci Robot 8:2256. https://doi.org/10.1126/scirobotics.ade2256 Article Google Scholar Dankwa S, Zheng W (2019) Twin-delayed DDPG: A deep reinforcement learning technique to model a continuous movement of an intelligent robot agent. In: International Conference on Vision, Image and Signal Processing, pp. 1–5 Dao J, Duan H, Fern A (2023) Sim-to-real learning for humanoid box loco-manipulation. arXiv preprint arXiv:2310.03191 Duan H, Dao J, Green K, Apgar T, Fern A, Hurst J (2021) Learning task space actions for bipedal locomotion. In: IEEE International Conference on Robotics and Automation, pp 1276–1282 Duan H, Malik A, Dao J, Saxena A, Green K, Siekmann J, Fern A, Hurst J (2022a) Sim-to-real learning of footstep-constrained bipedal dynamic walking. In: International Conference on Robotics and Automation, pp 10428–10434 Duan H, Malik A, Gadde MS, Dao J, Fern A, Hurst J (2022b) Learning dynamic bipedal walking across stepping stones. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 6746–6752. https://doi.org/10.1109/IROS47612.2022.9981884 Dzedzickis A, Subačiūtė-Žemaitienė J, Šutinys E, Samukaitė-Bubnienė U, Bučinskas V (2021) Advanced applications of industrial robotics: New trends and possibilities. Appl Sci 12:135 Article Google Scholar Feng G, Zhang H, Li Z, Peng XB, Basireddy B, Yue L, SONG Z, Yang L, Liu Y, Sreenath K, Levine S (2023) GenlLoco: Generalized locomotion controllers for quadrupedal robots. In: Conference on Robot Learning, vol 205, pp 1893–1903 Firoozi R, Tucker J, Tian S, Majumdar A, Sun J, Liu W, Zhu Y, Song S, Kapoor A, Hausman K et al (2023) Foundation models in robotics: Applications, challenges, and the future. Int J Robot Res 44(5):701–739 Article Google Scholar Freeman CD, Frey E, Raichuk A, Girgin S, Mordatch I, Bachem O (2021) Brax – a differentiable physics engine for large scale rigid body simulation arXiv:2106.13281 [cs.RO] Fu Z, Cheng X, Pathak D (2023) Deep whole-body control: Learning a unified policy for manipulation and locomotion. In: Conference on Robot Learning, pp. 138–149 Fu Z, Zhao Q, Wu Q, Wetzstein G, Finn C (2024) Humanplus: Humanoid shadowing and imitation from humans. arXiv preprint arXiv:2406.10454 Fuchioka Y, Xie Z, van de Panne M (2023) OPT-Mimic: Imitation of optimized trajectories for dynamic quadruped behaviors. In: IEEE International Conference on Robotics and Automation, pp. 5092–5098. https://doi.org/10.1109/ICRA48891.2023.10160562 Gangapurwala S, Geisert M, Orsolino R, Fallon M, Havoutis I (2022) RLOC: Terrain-aware legged locomotion using reinforcement learning and optimal control. IEEE Trans Robot 38:2908–2927. https://doi.org/10.1109/TRO.2022.3172469 Article Google Scholar García J, Shafie D (2020) Teaching a humanoid robot to walk faster through safe reinforcement learning. Eng Appl Artif Intell 88:103360. https://doi.org/10.1016/j.engappai.2019.103360 Article Google Scholar Gaspard C, Passault G, Daniel M, Ly O (2024) FootstepNet: an efficient actor-critic method for fast on-line bipedal footstep planning and forecasting. arXiv preprint arXiv:2403.12589 Green K, Godse Y, Dao J, Hatton RL, Fern A, Hurst J (2021) Learning spring mass locomotion: Guiding policies with a reduced-order model. IEEE Robot Autom Lett 6:3926–3932. https://doi.org/10.1109/LRA.2021.3066833 Article Google Scholar Gupta S, Kumar A (2017) A brief review of dynamics and control of underactuated biped robots. Adv Robot 31:607–623 Article Google Scholar Haarnoja T, Moran B, Lever G, Huang SH, Tirumala D, Humplik J, Wulfmeier M, Tunyasuvunakool S, Siegel NY, Hafner R et al (2024) Learning agile soccer skills for a bipedal robot with deep reinforcement learning. Sci Robot 9:8022 Article Google Scholar Heess N, TB, D, Sriram S, Lemmon J, Merel J, Wayne G, Tassa Y, Erez T, Wang Z, Eslami A, Riedmiller M, Silver D (2017) Emergence of locomotion behaviours in rich environments. arXiv preprint arXiv:1707.02286 Herzog A, Schaal S, Righetti L (2016) Structured contact force optimization for kino-dynamic motion generation. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 2703–2710. https://doi.org/10.1109/IROS.2016.7759420 Ho J, Ermon S (2016) Generative adversarial imitation learning. In: International Conference on Neural Information Processing Systems, pp 4572–4580 Hou L, Li B, Liu W, Xu Y, Yang S, Rong X (2022) Deep reinforcement learning for model predictive controller based on disturbed single rigid body model of biped robots. Machines 10:975 Article Google Scholar Huang C, Wang G, Zhou Z, Zhang R, Lin L (2023) Reward-adaptive reinforcement learning: Dynamic policy gradient optimization for bipedal locomotion. IEEE Trans Pattern Anal Mach Intell 45:7686–7695. https://doi.org/10.1109/TPAMI.2022.3223407 Article Google Scholar Huang X, Chi Y, Wang R, Li Z, Peng XB, Shao S, Nikolic B, Sreenath K (2024) Diffuseloco: Real-time legged locomotion control with diffusion from offline datasets. arXiv preprint arXiv:2404.19264 Hu Y, Xie Q, Jain V, Francis J, Patrikar J, Keetha N, Kim S, Xie Y, Zhang T, Fang H-S, et al (2023) Toward general-purpose robots via foundation models: A survey and meta-analysis. arXiv preprint arXiv:2312.08782 Hu J, Hendrix R, Farhadi A, Kembhavi A, Martin-Martin R, Stone P, Zeng K-H, Ehsani K (2024) Flare: Achieving masterful and adaptive robot policies with large-scale reinforcement learning fine-tuning. arXiv: 2409.16578 Humphreys J, Zhou C (2024) Learning to adapt through bio-inspired gait strategies for versatile quadruped locomotion. arXiv preprint arXiv:2412.09440 Hwangbo J, Lee J, Dosovitskiy A, Bellicoso D, Tsounis V, Koltun V, Hutter M (2019) Learning agile and dynamic motor skills for legged robots. Sci Robot 4:5872 Article Google Scholar Irpan A, Herzog A, Toshev AT, Zeng A, Brohan A, Ichter BA, David B, Parada C, Finn C, Tan C, et al (2022) Do as i can, not as i say: Grounding language in robotic affordances. arXiv preprint arXiv:2204.01691 Jenelten F, Grandia R, Farshidian F, Hutter M (2022) TAMOLS: Terrain-aware motion optimization for legged systems. IEEE Trans Robot 38:3395–3413. https://doi.org/10.1109/TRO.2022.3186804 Article Google Scholar Jenelten F, He J, Farshidian F, Hutter M (2024) DTC: Deep tracking control. Sci Robot 9:5401. https://doi.org/10.1126/scirobotics.adh5401 Article Google Scholar Kang D, Cheng J, Zamora M, Zargarbashi F, Coros S (2023) RL + Model-Based Control: Using on-demand optimal control to learn versatile legged locomotion. IEEE Robot Autom Lett 8:6619–6626. https://doi.org/10.1109/LRA.2023.3307008 Article Google Scholar Kasaei M, Abreu M, Lau N, Pereira A, Reis L (2021) Robust biped locomotion using deep reinforcement learning on top of an analytical control approach. Robot Autonom Syst 146:103900. https://doi.org/10.1016/j.robot.2021.103900 Article Google Scholar Khan MA-M, Khan MRJ, Tooshil A, Sikder N, Mahmud MAP, Kouzani AZ, Nahid A-A (2020) A systematic review on reinforcement learning-based robotics within the last decade. IEEE Access 8:176598–176623. https://doi.org/10.1109/ACCESS.2020.3027152 Article Google Scholar Kumar A, Li Z, Zeng J, Pathak D, Sreenath K, Malik J (2022) Adapting rapid motor adaptation for bipedal robots. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 1161–1168. https://doi.org/10.1109/IROS47612.2022.9981091 Kumar KN, Essa I, Ha S (2023) Words into action: Learning diverse humanoid robot behaviors using language guided iterative motion refinement. In: Workshop on Language and Robot Learning: Language as Grounding Leng J, Fan S, Tang J, Mou H, Xue J, Li Q (2022) M-A3C: A mean-asynchronous advantage actor-critic reinforcement learning method for real-time gait planning of biped robot. IEEE Access 10:76523–76536. https://doi.org/10.1109/ACCESS.2022.3176608 Article Google Scholar Li J, Nguyen Q (2023) Dynamic walking of bipedal robots on uneven stepping stones via adaptive-frequency mpc. IEEE Control Syst Lett 7:1279–1284. https://doi.org/10.1109/LCSYS.2023.3234769 Article MathSciNet Google Scholar Li T, Geyer H, Atkeson CG, Rai A (2019) Using deep reinforcement learning to learn high-level policies on the ATRIAS biped. In: International Conference on Robotics and Automation, pp 263–269. https://doi.org/10.1109/ICRA.2019.8793864 Li Z, Cheng X, Peng XB, Abbeel P, Levine S, Berseth G, Sreenath K (2021) Reinforcement learning for robust parameterized locomotion control of bipedal robots. In: IEEE International Conference on Robotics and Automation, pp 2811–2817. https://doi.org/10.1109/ICRA48506.2021.9560769 Li Z, Zeng J, Thirugnanam A, Sreenath K (2022) Bridging Model-based Safety and Model-free Reinforcement Learning through System Identification of Low Dimensional Linear Models. In: Proceedings of Robotics: Science and Systems. https://doi.org/10.15607/RSS.2022.XVIII.033 Li Z, Peng XB, Abbeel P, Levine S, Berseth G, Sreenath K (2023) Robust and versatile bipedal jumping control through multi-task reinforcement learning. In: Robotics: Science and Systems. https://doi.org/10.48550/arXiv.2302.09450 Li Z, Peng XB, Abbeel P, Levine S, Berseth G, Sreenath K (2024a) Reinforcement learning for versatile, dynamic, and robust bipedal locomotion control. arXiv e-prints, 2401 Li J, Ye L, Cheng Y, Liu H, Liang B (2024b) Agile and versatile bipedal robot tracking control through reinforcement learning. arXiv preprint arXiv:2404.08246 Lillicrap TP, Hunt JJ, Pritzel A, Heess N, Erez T, Tassa Y, Silver D, Wierstra D (2016) Continuous control with deep reinforcement learning. In: International Conference on Learning Representations Lin J, Zeng A, Lu S, Cai Y, Zhang R, Wang H, Zhang L (2024) Motion-X: A large-scale 3D expressive whole-body human motion dataset. NeurIPS Liang J, Huang W, Xia F, Xu P, Hausman K, Ichter B, Florence P, Zeng A (2022) Code as policies: Language model programs for embodied control. In: arXiv Preprint arXiv:2209.07753 Liu L, van de Panne M, Yin K (2016) Guided learning of control graphs for physics-based characters. ACM Trans Graph 35:1–14. https://doi.org/10.1145/2893476 Article Google Scholar Lobos-Tsunekawa K, Leiva F, Ruiz-del-Solar J (2018) Visual navigation for biped humanoid robots using deep reinforcement learning. IEEE Robot Autom Lett 3(4):3247–3254. https://doi.org/10.1109/LRA.2018.2851148 Article Google Scholar Ma Y, Farshidian F, Miki T, Lee J, Hutter M (2022) Combining learning-based locomotion policy with model-based manipulation for legged mobile manipulators. IEEE Robot Autom Lett 7:2377–2384. https://doi.org/10.1109/LRA.2022.3143567 Article Google Scholar Mahmood N, Ghorbani N, Troje NF, Pons-Moll G, Black M (2019) AMASS: Archive of motion capture as surface shapes. In: 2019 IEEE/CVF International Conference on Computer Vision, pp 5441–5450. https://doi.org/10.1109/ICCV.2019.00554 Marum B, Sabatelli M, Kasaei H (2023a) Learning perceptive bipedal locomotion over irregular terrain. arXiv preprint arXiv:2304.07236 Marum B, Sabatelli M, Kasaei H (2023b) Learning vision-based bipedal locomotion for challenging terrain. arXiv preprint arXiv:2309.14594 Masuda S, Takahashi K (2023) Sim-to-real transfer of compliant bipedal locomotion on torque sensor-less gear-driven humanoid. In: IEEE-RAS International Conference on Humanoid Robots, pp. 1–8 Meduri A, Khadiv M, Righetti L (2021) DeepQ Stepper: A framework for reactive dynamic walking on uneven terrain. In: IEEE International Conference on Robotics and Automation, pp 2099–2105. https://doi.org/10.1109/ICRA48506.2021.9562093 Merel J, Tassa Y, TB, D, Srinivasan S, Lemmon J, Wang Z, Wayne G, Heess N (2017) Learning human behaviors from motion capture by adversarial imitation. arXiv:1707.02201 Mittal M, Yu C, Yu Q, Liu J, Rudin N, Hoeller D, Yuan JL, Singh R, Guo Y, Mazhar H, Mandlekar A, Babich B, State G, Hutter M, Garg A (2023) ORBIT: A unified simulation framework for interactive robot learning environments. IEEE Robot Autom Lett 8(6):3740–3747. https://doi.org/10.1109/LRA.2023.3270034 Article Google Scholar Morimoto J, Cheng G, Atkeson CG, Zeglin G (2004) A simple reinforcement learning algorithm for biped walking. In: IEEE International Conference on Robotics and Automation, pp 3030–30353. https://doi.org/10.1109/ROBOT.2004.1307522 Nguyen Q, Hereid A, Grizzle JW, Ames AD, Sreenath K (2016) 3D dynamic walking on stepping stones with control barrier functions. In: IEEE Conference on Decision and Control, pp. 827–834. https://doi.org/10.1109/CDC.2016.7798370 Ouyang Y, Li J, Li Y, Li Z, Yu C, Sreenath K, Wu Y (2024) Long-horizon locomotion and manipulation on a quadrupedal robot with large language models. arXiv preprint arXiv:2404.05291 Park H, Yu R, Lee Y, Lee K, Lee J (2020) Understanding the stability of deep control policies for biped locomotion. Vis Comput 39:1–15 Google Scholar Penco L, Clement B, Modugno V, Mingo Hoffman E, Nava G, Pucci D, Tsagarakis NG, Mouret J-B, Ivaldi S (2018) Robust real-time whole-body motion retargeting from human to humanoid. In: 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), pp 425–432. https://doi.org/10.1109/HUMANOIDS.2018.8624943 Peng XB, van de Panne M (2017) Learning locomotion skills using DeepRL: Does the choice of action space matter? In: ACM SIGGRAPH/Eurographics Symposium on Computer Animation, pp 1–13 Peng X, Berseth G, Yin K, van de Panne M (2017) DeepLoco: dynamic locomotion skills using hierarchical deep reinforcement learning. ACM Trans Graph 36:1–13. https://doi.org/10.1145/3072959.3073602 Article Google Scholar Peng X, Abbeel P, Levine S, van de Panne M (2018) DeepMimic: Example-guided deep reinforcement learning of physics-based character skills. ACM Trans Graph 37:143. https://doi.org/10.1145/3197517.3201311 Article Google Scholar Peng XB, Coumans E, Zhang T, Lee T-WE, Tan J, Levine S (2020) Learning agile robotic locomotion skills by imitating animals. In: Robotics: Science and Systems. https://doi.org/10.15607/RSS.2020.XVI.064 Qi J, Gao H, Su H, Han L, Su B, Huo M, Yu H, Deng Z (2023) Reinforcement learning-based stable jump control method for asteroid-exploration quadruped robots. Aerosp Sci Technol 142:108689 Article Google Scholar Radosavovic I, Xiao T, Zhang B, Darrell T, Malik J, Sreenath K (2024a) Real-world humanoid locomotion with reinforcement learning. Sci Robot 9(89):9579 Radosavovic I, Zhang B, Shi B, Rajasegaran J, Kamat S, Darrell T, Sreenath K, Malik J (2024b) Humanoid locomotion as next token prediction. arXiv preprint arXiv:2402.19469 Rafailov R, Hatch KB, Kolev V, Martin JD, Phielipp M, Finn C (2023) MOTO: Offline pre-training to online fine-tuning for model-based robot learning. In: Proceedings of The 7th Conference on Robot Learning. Proceedings of Machine Learning Research, vol. 229, pp. 3654–3671 Reher J, Ames A (2021) Dynamic walking: Toward agile and efficient bipedal robots. Ann Rev Control Robot Auton Syst 4:535–572. https://doi.org/10.1146/annurev-control-071020-045021 Article Google Scholar Robotics NA (2025) Isaac Lab. https://isaac-sim.github.io/IsaacLab/main/index.html. Accessed: 2025-06-06 Rodriguez D, Behnke S (2021) DeepWalk: Omnidirectional bipedal gait by deep reinforcement learning. In: IEEE International Conference on Robotics and Automation, pp 3033–3039. https://doi.org/10.1109/ICRA48506.2021.9561717 Rudin N, Kolvenbach H, Tsounis V, Hutter M (2022) Cat-like jumping and landing of legged robots in low gravity using deep reinforcement learning. IEEE Trans Robot 38:317–328. https://doi.org/10.1109/TRO.2021.3084374 Article Google Scholar Rudin N, Hoeller D, Reist P, Hutter M (2022) Learning to walk in minutes using massively parallel deep reinforcement learning. In: Conference on Robot Learning, pp 91–100 Schulman J, Levine S, Abbeel P, Jordan M, Moritz P (2015) Trust region policy optimization. In: International Conference on Machine Learning, pp. 1889–1897 Schulman J, Wolski F, Dhariwal P, Radford A, Klimov O (2017) Proximal policy optimization algorithms. arXiv:1707.06347 Seo M, Han S, Sim K, Bang SH, Gonzalez C, Sentis L, Zhu Y (2023) Deep imitation learning for humanoid loco-manipulation through human teleoperation. In: IEEE-RAS International Conference on Humanoid Robots, pp 1–8 Siekmann J, Valluri S, Dao J, Bermillo L, Duan H, Fern A, Hurst JW (2020) Learning memory-based control for human-scale bipedal locomotion. In: Robotics Science and Systems Siekmann J, Godse Y, Fern A, Hurst J (2021a) Sim-to-real learning of all common bipedal gaits via periodic reward composition. In: IEEE International Conference on Robotics and Automation, pp 7309–7315 Siekmann J, Green K, Warila J, Fern A, Hurst J (2021b) Blind bipedal stair traversal via sim-to-real reinforcement learning. In: Robotics: Science and Systems. https://doi.org/10.15607/RSS.2021.XVII.061 Singh RP, Benallegue M, Morisawa M, Cisneros R, Kanehiro F (2022) Learning bipedal walking on planned footsteps for humanoid robots. In: IEEE-RAS International Conference on Humanoid Robots, pp 686–693. https://doi.org/10.1109/Humanoids53995.2022.10000067 Singh RP, Xie Z, Gergondet P, Kanehiro F (2023) Learning bipedal walking for humanoids with current feedbackLearning bipedal walking for humanoids with current feedback. IEEE Access 11:82013–82023. https://doi.org/10.1109/access.2023.3301175 Article Google Scholar Smith L, Kostrikov I, Levine S (2023) Demonstrating a walk in the park: Learning to walk in 20 minutes with model-free reinforcement learning. Robotics: Science and Systems Demo 2, 4 Tang A, Hiraoka T, Hiraoka N, Shi F, Kawaharazuka K, Kojima K, Okada K, Inaba M (2023) HumanMimic: Learning natural locomotion and transitions for humanoid robot via wasserstein adversarial imitation. arXiv preprint arXiv:2309.14225 Tao C, Xue J, Zhang Z, Gao Z (2022) Parallel deep reinforcement learning method for gait control of biped robot. IEEE Trans Circuits Syst II Express Briefs 69:2802–2806. https://doi.org/10.1109/TCSII.2022.3145373 Article Google Scholar Tao C, Li M, Cao F, Gao Z, Zhang Z (2023) A multiobjective collaborative deep reinforcement learning algorithm for jumping optimization of bipedal robot. Adv Intell Syst 6:2300352. https://doi.org/10.1002/aisy.202300352 Article Google Scholar Taylor M, Bashkirov S, Rico JF, Toriyama I, Miyada N, Yanagisawa H, Ishizuka K (2021) Learning bipedal robot locomotion from human movement. In: IEEE International Conference on Robotics and Automation, pp 2797–2803. https://doi.org/10.1109/ICRA48506.2021.9561591 Tedrake R, Zhang TW, Seung HS (2004) Stochastic policy gradient reinforcement learning on a simple 3D biped. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 2849–2854. https://doi.org/10.1109/IROS.2004.1389841 Todorov E, Erez T, Tassa Y (2012) MuJoCo: A physics engine for model-based control. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 5026–5033 Tong Y, Liu H, Zhang Z (2024) Advancements in humanoid robots: A comprehensive review and future prospects. IEEE/CAA J Autom Sin 11:301–328 Article Google Scholar Wang S, Piao S, Leng X, He Z (2023) Learning 3D bipedal walking with planned footsteps and Fourier series periodic gait planning. Sensors 23:1873 Article Google Scholar Wensing PM, Orin DE (2013) High-speed humanoid running through control with a 3D-SLIP model. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 5134–5140. https://doi.org/10.1109/IROS.2013.6697099 Wu P, Escontrela A, Hafner D, Abbeel P, Goldberg K (2023) DayDreamer: World models for physical robot learning. In: Conference on Robot Learning, pp. 2226–2240 Xie Z, Berseth G, Clary P, Hurst J, van de Panne M (2018) Feedback control for cassie with deep reinforcement learning. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 1241–1246. https://doi.org/10.1109/IROS.2018.8593722 Xie Z, Ling H, Kim N, van de Panne M (2020a) ALLSTEPS: Curriculum-driven learning of stepping stone skills. Comput Graph Forum 39:213–224. https://doi.org/10.1111/cgf.14115 Article Google Scholar Xie Z, Clary P, Dao J, Morais P, Hurst J, van de Panne M (2020b) Learning locomotion skills for cassie: Iterative design and sim-to-real. In: Conference on Robot Learning, pp 317–329 Yang M, Yang E, Zante RC, Post M, Liu X (2019a) Collaborative mobile industrial manipulator: a review of system architecture and applications. In: International Conference on Automation and Computing, pp 1–6 Yang C, Yuan K, Merkt W, Komura T, Vijayakumar S, Li Z (2019b) Learning whole-body motor skills for humanoids. In: IEEE-RAS International Conference on Humanoid Robots, pp 270–276. https://doi.org/10.1109/HUMANOIDS.2018.8625045 Yang C, Yuan K, Heng S, Komura T, Li Z (2020) Learning natural locomotion behaviors for humanoid robots using human bias. IEEE Robot Autom Lett 5:2610–2617. https://doi.org/10.1109/LRA.2020.2972879 Article Google Scholar Yao Y, He W, Gu C, Du J, Tan F, Zhu Z, Lu J (2024) AnyBipe: An end-to-end framework for training and deploying bipedal robots guided by large language models [cs.RO] https://doi.org/10.48550/arXiv.2409.08904 Yin F, Tang A, Xu L, Cao Y, Zheng Y, Zhang Z, Chen X (2021) Run like a dog: Learning based whole-body control framework for quadruped gait style transfer. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 8508–8514. https://doi.org/10.1109/IROS51168.2021.9636805 Yu C, Rosendo A (2022) Multi-modal legged locomotion framework with automated residual reinforcement learning. IEEE Robot Autom Lett 7:10312–10319. https://doi.org/10.1109/LRA.2022.3191071 Article Google Scholar Yu W, Turk G, Liu CK (2018) Learning symmetric and low-energy locomotion. ACM Trans Graph 37:1–12. https://doi.org/10.1145/3197517.3201397 Article Google Scholar Yu W, Kumar VCV, Turk G, Liu CK (2019) Sim-to-real transfer for biped locomotion. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 3503–3510 Zhang Q, Cui P, Yan D, Sun J, Duan Y, Zhang A, Xu R (2024) Whole-body humanoid robot locomotion with human reference. arXiv preprint arXiv:2402.18294 Zhu W, Hayashibe M (2023) A hierarchical deep reinforcement learning framework with high efficiency and generalization for fast and safe navigation. IEEE Trans Ind Electron 70:4962–4971. https://doi.org/10.1109/TIE.2022.3190850 Article Google Scholar Download references This work was partially supported by the Royal Society (Grant Number RG\(\backslash \)R2\(\backslash \)232409) and the Advanced Research and Invention Agency (Grant Number SMRB-SE01-P06). For the purpose of open access, the authors have applied a Creative Commons Attribution (CC BY) licence to any Author Accepted Manuscript version arising from this submission. Department of Computer Science, University College London, London, UK Lingfan Bao, Joseph Humphreys, Tianhu Peng & Chengxu Zhou School of Mechanical Engineering, University of Leeds, Leeds, UK Joseph Humphreys Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar L. B. conceived and designed the analysis; contributed to the drafting of the manuscript. J. H. contributed to Section 5.2.3. All authors discussed the results and contributed to the final manuscript. Correspondence to Chengxu Zhou. The authors declare no conflict of interest. Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations. Diagram for RL algorithms catalogue The advancement and development of RL are crucial for bipedal locomotion. Specifically, advances in deep learning provide deep NNs that serve as function approximators, enabling RL to handle tasks characterised by high-dimensional and continuous spaces by efficiently discovering condensed, low-dimensional representations of complex data. In comparison with other robots of different morphologies, such as wheeled robots, bipedal robots possess far higher DoFs and continuously interact with their environments, which results in greater demands on DRL algorithms. In particular, within legged locomotion, policy-gradient-based algorithms are prevalent in bipedal locomotion research (Fig. 5). Designing an effective NN architecture is essential for tackling complex bipedal locomotion tasks. Multi-Layer Perceptrons (MLPs), a fundamental NN structure, excel in straightforward regression tasks with lower computational resource requirements. A comprehensive comparison between MLPs and the memory-based NN LSTM reveals that MLPs have an advantage in convergence speed for many tasks (Singh et al. 2023). However, LSTMs, as variants of recurrent neural networks (RNNs), are adept at processing time-associated data, effectively relating different states across time and modelling key physical properties vital for periodic gaits (Siekmann et al. 2021a) and successful sim-to-real transfer in bipedal locomotion. Additionally, convolutional neural networks (CNNs) specialise in spatial data processing, particularly for image-related tasks, making them highly suitable for environments where visual perception is crucial. This diversity of NN architectures highlights the importance of selecting an appropriate model based on the specific requirements of bipedal locomotion tasks. Considering DRL algorithms, recent bipedal locomotion studies have focused on model-free RL algorithms. Unlike model-based RL, which learns a model of the environment but may inherit biases from simulations that do not accurately reflect real-world conditions, model-free RL directly trains policies through environmental interaction without relying on an explicit environmental model. Although model-free RL requires more computational samples and resources, it can train more robust policies that allow robots to traverse challenging environments. Many sophisticated model-free RL algorithms exist, which can be broadly classified into two categories: policy-based (or policy optimisation) and value-based approaches. Value-based methods, e.g. Q-learning, State-Action-Reward-State-Action (SARSA), and Deep Q-learning (DQN) (Meduri et al. 2021), excel only in discrete action spaces and often struggle with high-dimensional action spaces. Q-learning is an off-policy algorithm that directly learns the optimal Q-values, allowing it to derive the best possible actions irrespective of the current policy. SARSA, an on-policy variant, updates its Q-values based on the actual actions taken, making it robust in environments where the policy evolves during learning. DQN extends Q-learning by using deep NNs to approximate Q-values, enabling the algorithm to tackle complex state spaces, though it still faces challenges with high-dimensional action spaces due to difficulties in accurate value estimation. In contrast, policy-based methods, such as policy-gradient techniques, can handle complex tasks but are generally less sample-efficient than value-based methods. More advanced algorithms combine both policy-based and value-based methods. The Actor–Critic (AC) framework simultaneously learns both a policy (actor) and a value function (critic), combining the advantages of both approaches (Lillicrap et al. 2016; Liu et al. 2016). Popular algorithms such as Trust Region Policy Optimisation (TRPO) (Schulman et al. 2015) and PPO, based on policy-based methods, borrow ideas from AC. Moreover, other novel algorithms based on the AC framework include Deep Deterministic Policy Gradient (DDPG) (Huang et al. 2023), Twin Delayed Deep Deterministic Policy Gradients (TD3) (Dankwa and Zheng 2019), A2C (Advantage Actor–Critic), A3C (Asynchronous Advantage Actor–Critic) (Leng et al. 2022), and SAC (Soft Actor–Critic) (Yu and Rosendo 2022). Each algorithm has its strengths for different tasks in bipedal locomotion scenarios. Several key factors determine their performance, such as sample efficiency, robustness and generalisation, and implementation complexity. A comparative analysis (Aydogmus and Yilmaz 2023) illustrates that SAC-based algorithms excel in stability and achieve the highest scores, while their training efficiency significantly trails behind that of PPO, which attains relatively high scores. In Schulman et al. (2017), PPO demonstrates robustness and computational efficiency in complex scenarios such as bipedal locomotion, utilising fewer resources than TRPO. In terms of training time, PPO is much faster than SAC and DDPG (Aydogmus and Yilmaz 2023). Moreover, many studies (Siekmann et al. 2021a; Green et al. 2021; Siekmann et al. 2020) have demonstrated its robustness and ease of implementation. Combined with its flexibility to integrate with various NN architectures, this has made PPO the most popular choice in the field. Numerous studies have shown that PPO can enable the exploration of walking (Siekmann et al. 2021a), jumping (Li et al. 2023), stair climbing (Siekmann et al. 2021b), and stepping-stone traversal (Duan et al. 2022b), demonstrating its efficiency, robustness, and generalisation. Additionally, the DDPG algorithm integrates the Actor–Critic framework with DQN to facilitate off-policy training, further optimising sample efficiency. In certain scenarios, such as jumping, DDPG shows higher rewards and better learning performance than PPO (Tao et al. 2023, 2022). TD3, developed from DDPG, improves upon the performance of both DDPG and SAC (Yu and Rosendo 2022). SAC improves exploration through its stochastic policy and entropy-regularised objective, which encourages the agent to maintain randomness in its actions, balancing exploration and exploitation more effectively than DDPG and TD3. Unlike PPO, which is an on-policy algorithm, SAC’s off-policy nature allows it to leverage a replay buffer, reusing past experiences for training without requiring constant interaction with the environment. This, combined with entropy maximisation, enables SAC to achieve faster convergence in complex environments where exploration is essential. SAC is also known for its stability and strong performance across a wide range of tasks (Yu and Rosendo 2022). While A2C offers improved efficiency and stability compared with A3C, the asynchronous update mechanism of A3C provides better exploration capability and accelerates learning. Although these algorithms demonstrate clear advantages, they are more challenging to apply owing to their complexity compared with PPO. The development of DRL algorithms and sim-to-real techniques highlights the requirement for high-quality simulators. Creating a reliable simulation environment and conducting RL training is challenging. The literature shows that several simulators are available, including Isaac Gym (Rudin et al. 2022), RoboCup3D (Birk et al. 2003), OpenAI Gym (Brockman et al. 2016), MuJoCo (Todorov et al. 2012), Orbit (Mittal et al. 2023), Brax (Freeman et al. 2021), and Isaac Lab (Robotics 2023). OpenAI developed Gym and Gymnasium to provide lightweight environments for rapid testing of RL algorithms, including simplified bipedal locomotion models. RoboCup also serves as a benchmark platform for RL research and development in multi-agent settings. For physics-based simulation, MuJoCo, developed by DeepMind, and Gazebo are widely used platforms that support a range of robotics research tasks. NVIDIA’s Isaac Gym, although now deprecated, played an important role as a high-performance GPU-based simulator for training agents in complex environments. Its successors, such as Isaac Lab and Orbit, continue to evolve as modern RL and robotics frameworks. One of the most crucial aspects is the parallelisation strategy and GPU simulation. For instance, Isaac Gym was developed to maximise the throughput of physics-based machine learning algorithms, with particular emphasis on simulations requiring large numbers of environment instances executing in parallel. Running the physics simulation on a GPU can result in significant speed-ups, especially for large scenes with thousands of individual actors. Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/. Reprints and permissions Bao, L., Humphreys, J., Peng, T. et al. Deep reinforcement learning for robotic bipedal locomotion: a brief survey. Artif Intell Rev 59, 38 (2026). https://doi.org/10.1007/s10462-025-11451-z Download citation Received: 25 April 2024 Accepted: 11 November 2025 Published: 27 December 2025 Version of record: 29 December 2025 DOI: https://doi.org/10.1007/s10462-025-11451-z Anyone you share the following link with will be able to read this content: Sorry, a shareable link is not currently available for this article. Provided by the Springer Nature SharedIt content-sharing initiative Advertisement 178.128.244.209 Not affiliated © 2026 Springer Nature
Images (10): 
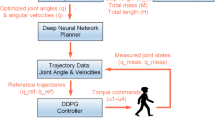

|
|||||
| Robots learn human touch with less data using adaptive motion … | https://interestingengineering.com/ai-r… | 1 | Jan 28, 2026 00:04 | active | |
Robots learn human touch with less data using adaptive motion systemURL: https://interestingengineering.com/ai-robotics/adaptive-robot-motion-gaussian-process-regression Description: Japanese researchers develop an adaptive robot motion system that enables human-like grasping using minimal training data. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Access expert insights, exclusive content, and a deeper dive into engineering and innovation. Engineering-inspired textiles, mugs, hats, and thoughtful gifts We connect top engineering talent with the world's most innovative companies. We empower professionals with advanced engineering and tech education to grow careers. We recognize outstanding achievements in engineering, innovation, and technology. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation. Engineering-inspired textiles, mugs, hats, and thoughtful gifts We connect top engineering talent with the world's most innovative companies We empower professionals with advanced engineering and tech education to grow careers. We recognize outstanding achievements in engineering, innovation, and technology. All Rights Reserved, IE Media, Inc. A new adaptive motion system helps robots replicate human grasping behavior using Gaussian process regression and limited data. Researchers in Japan have developed an adaptive motion reproduction system that allows robots to generate human-like movements using surprisingly small amounts of training data. Despite rapid advances in robotic automation, most systems struggle when objects change in weight, stiffness, or texture. Pretrained motions often fail outside controlled environments, limiting robots to predictable tasks on factory floors. That limitation becomes critical as robots move into real-world settings such as kitchens, hospitals, and homes. In these environments, robots must constantly adjust how they grasp and apply force, something humans do instinctively. Unlike human hands, robotic systems lack the ability to intuitively adapt to unfamiliar objects. This gap has been one of the biggest barriers to deploying robots in dynamic, unstructured environments. To address this challenge, a research team from Japan developed a new adaptive motion reproduction system based on Gaussian process regression. The study was led by Keio University’s Akira Takakura. Motion reproduction systems typically rely on recording human movements and replaying them through robots using teleoperation. However, these systems break down when the physical properties of the object differ from the original training data. The new approach moves beyond linear models by using Gaussian process regression, a technique capable of mapping complex nonlinear relationships with limited data. By recording human grasping motions across objects with different stiffness levels, the model learns how object properties relate to human-applied force and position. This allows the system to infer human motion intent and generate appropriate movements for objects it has never seen before. “Developing the ability to manipulate commonplace objects in robots is essential for enabling them to interact with objects in daily life and respond appropriately to the forces they encounter,” explains Dr. Takahiro Nozaki. The team tested the system against conventional motion reproduction systems, linear interpolation methods, and a typical imitation learning model. For interpolation tasks, where object stiffness fell within the training range, the system reduced position errors by at least 40 percent and force errors by 34 percent. For extrapolation tasks involving objects outside the training range, position error dropped by 74 percent. In all scenarios, the Gaussian process regression-based system outperformed existing methods by a wide margin. The ability to reproduce accurate human-like motion using minimal data could significantly lower the cost and complexity of deploying adaptive robots across industries. “Since this technology works with a small amount of data and lowers the cost of machine learning, it has potential applications across a wide range of industries, including life-support robots, which must adapt their movements to different targets each time, and it can lower the bar for companies that have been unable to adopt machine learning due to the need for large amounts of training data,” said Takakura. The research builds on Keio University’s long-standing work in force-tactile feedback, motion modeling, and haptic technologies. The group’s earlier work on sensitive robotic arms and avatar robots has received recognition from IEEE, the Japanese government, and Forbes. By enabling robots to adapt touch and motion more like humans, the study brings automation one step closer to operating reliably in the unpredictable real world. The study appears in IEEE Transactions on Industrial Electronics. With over a decade-long career in journalism, Neetika Walter has worked with The Economic Times, ANI, and Hindustan Times, covering politics, business, technology, and the clean energy sector. Passionate about contemporary culture, books, poetry, and storytelling, she brings depth and insight to her writing. When she isn’t chasing stories, she’s likely lost in a book or enjoying the company of her dogs. Premium Follow
Images (1): 
|
|||||
| Rho-Alpha Unleashed: Microsoft's Bid to Wire AI into Robots | https://www.webpronews.com/rho-alpha-un… | 1 | Jan 27, 2026 08:00 | active | |
Rho-Alpha Unleashed: Microsoft's Bid to Wire AI into RobotsURL: https://www.webpronews.com/rho-alpha-unleashed-microsofts-bid-to-wire-ai-into-robots/ Description: Keywords Content:
For decades, robots have excelled in structured settings like assembly lines, where tasks are predictable and tightly scripted. Now, Microsoft Research is pushing boundaries with Physical AI, fusing agentic systems with robotics to enable autonomy in dynamic, human-shared spaces. The launch of Rho-alpha, Microsoft’s inaugural robotics foundation model from the Phi series, marks a pivotal shift, translating natural language into precise physical actions. Ashley Llorens, Corporate Vice President and Managing Director of Microsoft Research Accelerator, emphasized the transformative potential: “The emergence of vision-language-action (VLA) models for physical systems is enabling systems to perceive, reason, and act with increasing autonomy alongside humans in environments that are far less structured.” This vision, detailed in Microsoft Research, positions Physical AI as the next frontier after generative leaps in language and vision. Rho-alpha stands out as a VLA+ model, incorporating tactile sensing and continual learning from human feedback. Trained on physical demonstrations, simulated tasks via NVIDIA Isaac Sim on Azure, and web-scale visual data, it tackles bimanual manipulation with end-to-end efficiency. Demos on the BusyBox benchmark showcase commands like “Push the green button with the right gripper” or “Pull out the red wire,” executed in real-time on dual UR5e arms equipped with tactile sensors. Rho-Alpha’s Core Innovations Challenges like plug insertion test Rho-alpha’s limits; when the right arm falters, human teleoperation via 3D mouse provides corrective input, enabling on-the-fly adaptation. Professor Abhishek Gupta of the University of Washington noted: “While generating training data by teleoperating robotic systems has become a standard practice, there are many settings where teleoperation is impractical or impossible. We are working with Microsoft Research to enrich pre-training datasets collected from physical robots with diverse synthetic demonstrations using a combination of simulation and reinforcement learning.” This collaboration addresses data scarcity head-on. NVIDIA’s Deepu Talla, Vice President of Robotics and Edge AI, highlighted the simulation edge: “Training foundation models that can reason and act requires overcoming the scarcity of diverse, real-world data. By leveraging NVIDIA Isaac Sim on Azure to generate physically accurate synthetic datasets, Microsoft Research is accelerating the development of versatile models like Rho-alpha that can master complex manipulation tasks.” Evaluations extend to humanoid robots, with technical details forthcoming. Microsoft’s broader Physical AI push integrates multimodal sensing—vision, language, touch—and plans for force modalities. Tooling for cloud-hosted deployment allows enterprises to fine-tune models with proprietary data, targeting manufacturers and integrators. Overcoming Data Droughts Historical robotics constraints—predictable factories versus chaotic real-world variability—are crumbling. Startup News FYI reports Microsoft’s focus on embodied intelligence for warehouses, manufacturing aids, and adaptive autonomy, stressing safety amid physical risks like damage or regulatory hurdles. Partnerships amplify momentum. Hexagon Robotics teamed with Microsoft at CES to scale Physical AI frameworks across imitation learning, reinforcement, and VLA models for humanoid robots in manufacturing. Aaron Schnieder, Microsoft’s VP of Engineering and Emerging Technologies, stated: “This partnership with Hexagon Robotics marks a pivotal moment in bridging the gap between cutting-edge humanoid robot innovation and real-world industrial impact. By combining AEON’s sensor fusion and spatial intelligence with Microsoft Azure’s scalable AI and cloud infrastructure, we’re empowering customers to deploy adaptive, AI-powered humanoid robots.” Arnaud Robert, Hexagon Robotics President, added: “The strategic partnership with Microsoft is a big step towards realising our vision to build an autonomous future and address labour shortage across vital industries.” Johns Hopkins APL collaborates on autonomous robot teams and materials discovery, leveraging Microsoft’s generative models for independent planning and execution in complex environments, per Johns Hopkins APL. Strategic Alliances Accelerate Deployment Predecessors like Magma, a multimodal foundation model for digital-physical agents, pave the way. It processes UI navigation and robotic tasks using Set-of-Mark annotations for key objects, as outlined in Microsoft Research. Microsoft Research Asia’s StarTrack Scholars advance spatial intelligence via 3D vision for robust actions. Industry panels, such as Ignite sessions with NVIDIA and Wandelbots, explore wiring factory data into simulations for safe industrial rollouts. Datacenter robotics for self-maintenance, detailed in Microsoft Research, targets transceiver manipulation in cluttered environments. Early access to Rho-alpha via Microsoft’s Research Program invites experimentation, signaling readiness for enterprise adaptation. As Physical AI evolves, Microsoft’s infrastructure—Azure, Phi lineage, simulation prowess—positions it to dominate real-world applications from factories to homes. Physical AI’s Industrial Frontier Broader 2026 trends align: TechCrunch predicts physical AI growth in wearables and games before full robotics scale, while Microsoft’s research forecasts agentic systems as collaborators. Safety, governance, and adaptability remain core, ensuring robots earn trust in human realms. For decades, robots have excelled in structured settings like assembly lines, where tasks are predictable and tightly scripted. Now, Microsoft Research is pushing boundaries with Physical AI, fusing agentic systems with robotics to enable autonomy in dynamic, human-shared spaces. The launch of Rho-alpha, Microsoft’s inaugural robotics foundation model from the Phi series, marks a pivotal shift, translating natural language into precise physical actions. Ashley Llorens, Corporate Vice President and Managing Director of Microsoft Research Accelerator, emphasized the transformative potential: “The emergence of vision-language-action (VLA) models for physical systems is enabling systems to perceive, reason, and act with increasing autonomy alongside humans in environments that are far less structured.” This vision, detailed in Microsoft Research, positions Physical AI as the next frontier after generative leaps in language and vision. Rho-alpha stands out as a VLA+ model, incorporating tactile sensing and continual learning from human feedback. Trained on physical demonstrations, simulated tasks via NVIDIA Isaac Sim on Azure, and web-scale visual data, it tackles bimanual manipulation with end-to-end efficiency. Demos on the BusyBox benchmark showcase commands like “Push the green button with the right gripper” or “Pull out the red wire,” executed in real-time on dual UR5e arms equipped with tactile sensors. Rho-Alpha’s Core Innovations Challenges like plug insertion test Rho-alpha’s limits; when the right arm falters, human teleoperation via 3D mouse provides corrective input, enabling on-the-fly adaptation. Professor Abhishek Gupta of the University of Washington noted: “While generating training data by teleoperating robotic systems has become a standard practice, there are many settings where teleoperation is impractical or impossible. We are working with Microsoft Research to enrich pre-training datasets collected from physical robots with diverse synthetic demonstrations using a combination of simulation and reinforcement learning.” This collaboration addresses data scarcity head-on. NVIDIA’s Deepu Talla, Vice President of Robotics and Edge AI, highlighted the simulation edge: “Training foundation models that can reason and act requires overcoming the scarcity of diverse, real-world data. By leveraging NVIDIA Isaac Sim on Azure to generate physically accurate synthetic datasets, Microsoft Research is accelerating the development of versatile models like Rho-alpha that can master complex manipulation tasks.” Evaluations extend to humanoid robots, with technical details forthcoming. Microsoft’s broader Physical AI push integrates multimodal sensing—vision, language, touch—and plans for force modalities. Tooling for cloud-hosted deployment allows enterprises to fine-tune models with proprietary data, targeting manufacturers and integrators. Overcoming Data Droughts Historical robotics constraints—predictable factories versus chaotic real-world variability—are crumbling. Startup News FYI reports Microsoft’s focus on embodied intelligence for warehouses, manufacturing aids, and adaptive autonomy, stressing safety amid physical risks like damage or regulatory hurdles. Partnerships amplify momentum. Hexagon Robotics teamed with Microsoft at CES to scale Physical AI frameworks across imitation learning, reinforcement, and VLA models for humanoid robots in manufacturing. Aaron Schnieder, Microsoft’s VP of Engineering and Emerging Technologies, stated: “This partnership with Hexagon Robotics marks a pivotal moment in bridging the gap between cutting-edge humanoid robot innovation and real-world industrial impact. By combining AEON’s sensor fusion and spatial intelligence with Microsoft Azure’s scalable AI and cloud infrastructure, we’re empowering customers to deploy adaptive, AI-powered humanoid robots.” Arnaud Robert, Hexagon Robotics President, added: “The strategic partnership with Microsoft is a big step towards realising our vision to build an autonomous future and address labour shortage across vital industries.” Johns Hopkins APL collaborates on autonomous robot teams and materials discovery, leveraging Microsoft’s generative models for independent planning and execution in complex environments, per Johns Hopkins APL. Strategic Alliances Accelerate Deployment Predecessors like Magma, a multimodal foundation model for digital-physical agents, pave the way. It processes UI navigation and robotic tasks using Set-of-Mark annotations for key objects, as outlined in Microsoft Research. Microsoft Research Asia’s StarTrack Scholars advance spatial intelligence via 3D vision for robust actions. Industry panels, such as Ignite sessions with NVIDIA and Wandelbots, explore wiring factory data into simulations for safe industrial rollouts. Datacenter robotics for self-maintenance, detailed in Microsoft Research, targets transceiver manipulation in cluttered environments. Early access to Rho-alpha via Microsoft’s Research Program invites experimentation, signaling readiness for enterprise adaptation. As Physical AI evolves, Microsoft’s infrastructure—Azure, Phi lineage, simulation prowess—positions it to dominate real-world applications from factories to homes. Physical AI’s Industrial Frontier Broader 2026 trends align: TechCrunch predicts physical AI growth in wearables and games before full robotics scale, while Microsoft’s research forecasts agentic systems as collaborators. Safety, governance, and adaptability remain core, ensuring robots earn trust in human realms. Subscribe for Updates Help us improve our content by reporting any issues you find. Get the free daily newsletter read by decision makers Get our media kit Deliver your marketing message directly to decision makers.
Images (1): 
|
|||||
| Robots are teaching autistic children social skills — And it’s … | https://www.baltimoresun.com/2026/01/20… | 0 | Jan 26, 2026 08:00 | active | |
Robots are teaching autistic children social skills — And it’s actually workingURL: https://www.baltimoresun.com/2026/01/20/robot-therapist-for-autistic-children/ Description: Adding a robot to therapy sessions for children with autism can achieve equal results in social training, with improved engagement, researchers found. The techn... Content: |
|||||
| Mercado Libre integra robots humanoides Digit en Texas | https://www.pasionmovil.com/investigaci… | 1 | Jan 25, 2026 08:00 | active | |
Mercado Libre integra robots humanoides Digit en TexasDescription: Mercado Libre incorpora robots humanoides Digit de Agility Robotics en su centro logístico de Texas para optimizar operaciones y mejorar eficiencia. Content:
La automatización en la logística del comercio electrónico ha dado un paso significativo con el anuncio de Mercado Libre sobre la integración de robots humanoides en sus operaciones. Se trata de una alianza estratégica con Agility Robotics que marca el inicio de una nueva etapa en la gestión de almacenes, donde la tecnología robótica avanzada se suma a los procesos existentes sin necesidad de transformaciones costosas en la infraestructura actual. El protagonista de esta implementación es Digit, un robot humanoide desarrollado por Agility Robotics que comenzará sus labores en el centro logístico de San Antonio, Texas. Lo interesante de este desarrollo es su capacidad para integrarse de manera natural en entornos diseñados originalmente para trabajadores humanos. Con dimensiones y capacidades de movimiento similares a las de una persona, Digit puede desplazarse por pasillos, levantar contenedores y transportar materiales sin requerir modificaciones estructurales en las instalaciones. Las especificaciones operativas de Digit son impresionantes. Este robot ha demostrado su efectividad en pruebas comerciales reales, habiendo trasladado más de 100,000 contenedores en operaciones activas. Su funcionamiento autónomo está respaldado por la plataforma Agility Arc, que incorpora capacidades de inteligencia artificial para la toma de decisiones en tiempo real. Además, su diseño permite la colaboración fluida con otros sistemas de automatización ya existentes, como cintas transportadoras y robots móviles autónomos, creando un ecosistema logístico verdaderamente integrado. La decisión de Mercado Libre de apostar por esta tecnología no es casual. Según declaraciones de Agustín Costa, vicepresidente senior de Envíos de la compañía, existe un compromiso permanente con la exploración de tecnologías emergentes que puedan mejorar tanto las operaciones internas como la experiencia de colaboradores y usuarios. El objetivo principal es construir una red logística más segura, eficiente y adaptable para toda la región latinoamericana. Cabe destacar que esta iniciativa llega en un momento particularmente desafiante para la empresa. El gigante latinoamericano del e-commerce enfrenta una competencia cada vez más intensa con plataformas globales como Temu y Shein, al tiempo que experimenta cambios en su estructura de liderazgo. En este contexto, la automatización se presenta como una respuesta estratégica para mantener la competitividad y optimizar costos operativos, particularmente en puestos de alta rotación que tradicionalmente han sido difíciles de cubrir. La implementación de Digit busca abordar varios desafíos simultáneamente. Por un lado, estos robots están diseñados para asumir tareas repetitivas y físicamente exigentes, lo que potencialmente reduce el riesgo de lesiones laborales y mejora la ergonomía general del ambiente de trabajo. Por otro lado, su capacidad para operar de manera continua permite optimizar los tiempos de procesamiento de pedidos, un factor crítico en la industria del comercio electrónico donde la velocidad de entrega es determinante. Sin embargo, la visión de Mercado Libre va más allá de la simple sustitución de mano de obra. La colaboración con Agility Robotics incluye un componente de investigación y desarrollo para explorar nuevos casos de uso para robots humanoides equipados con inteligencia artificial. Esto sugiere que la compañía está pensando en el largo plazo, evaluando cómo esta tecnología puede evolucionar y adaptarse a necesidades futuras que aún no se han materializado completamente. Sin lugar a dudas, la integración de robots humanoides en la logística del comercio electrónico representa un punto de inflexión en la industria. La capacidad demostrada de Digit en entornos comerciales reales, combinada con su diseño adaptable y su autonomía operativa, sugiere que estamos ante el inicio de una tendencia que podría expandirse rápidamente en los próximos años. Para Mercado Libre, esta apuesta tecnológica no solo busca mejorar la eficiencia operativa inmediata, sino también posicionar a la compañía como líder en innovación logística en América Latina. Fuente: Agility Robotics Utilizamos cookies para ofrecerte la mejor experiencia en nuestra web. No compartimos tu información con nadie, simplemente queremos que navegues normalmente sin tener que rellenar formularios en cada visita. Puedes aprender más sobre qué cookies utilizamos o desactivarlas en los ajustes. Esta web utiliza cookies para que podamos ofrecerte la mejor experiencia de usuario posible. La información de las cookies se almacena en tu navegador y realiza funciones tales como reconocerte cuando vuelves a nuestra web o ayudarnos a comprender qué secciones de la web encuentras más interesantes y útiles. Nunca almacenamos información personal. Tienes toda la información sobre privacidad, derechos legales y cookies en nuestra página de privacidad y cookies. Strictly Necessary Cookie should be enabled at all times so that we can save your preferences for cookie settings. Esta web utiliza Google Analytics para recopilar información anónima tal como el número de visitantes del sitio, o las páginas más populares. Dejar esta cookie activa nos permite mejorar nuestra web.
Images (1): 
|
|||||
| Aerospace Robotics Market Cons And Pros To Consider | https://medium.com/@miraray351/aerospac… | 0 | Jan 24, 2026 16:01 | active | |
Aerospace Robotics Market Cons And Pros To ConsiderURL: https://medium.com/@miraray351/aerospace-robotics-market-cons-and-pros-to-consider-e00090164aa4 Description: The Aerospace Robotics Market was valued at USD 3,158.6 Million in 2021 and is estimated to register a CAGR of 11.7% by 2022–2030 The use of automated testing... Content: |
|||||
| Robot butlers look more like Roombas than Rosey from the … | https://www.vox.com/technology/476037/a… | 1 | Jan 24, 2026 08:00 | active | |
Robot butlers look more like Roombas than Rosey from the Jetsons | VoxURL: https://www.vox.com/technology/476037/ai-robots-tesla-humanoid Description: What’s standing in the way of our robot overlords. Content:
When news breaks, you need to understand what actually matters. At Vox, our mission is to help you make sense of the world — and that work has never been more vital. But we can’t do it on our own. We rely on readers like you to fund our journalism. Will you support our work and become a Vox Member today? What’s standing in the way of our robot overlords. The robots in my building are multiplying. It started with one roughly the size of a doghouse that cleans the floors, and not very well — a commercial-grade Roomba that talks to you if you get in its way. Somehow, I’m always in its way. My landlord was clearly excited about the new, technical marvel of an addition to the building, which takes up half the size of a New York City block. There are plenty of floors to clean and human hours of labor to save. Then my landlord told me the robot, which had been confined to the lobby, could now wirelessly connect to the elevator and control it. The robot now rides up and down all day, exiting the elevator to clean each floor’s hallway. The landlord, pleased with this new complexity, got two more, bigger robots to complete the fleet. In the spring, he told me with a straight face, there would be drones to clean the windows. I fully expect to see them as soon as Daylight Savings Time kicks in. If you believe the press releases, we’re about to start seeing more robots everywhere — and not just doghouse-sized Roombas. Humanoid robots are on track to be a $200 billion industry by 2035 “under the most optimistic scenarios,” according to a new report from Barclays Research. The cost of the hardware needed to give robots powerful arms and legs has plummeted in the last decade, and the AI boom is giving investors hope that powerful brains will soon follow. That’s why you’re now hearing about consumer-grade humanoids like the 1X Neo and the Figure 03, which are designed to be robot butlers. A weekly dispatch to make sure tech is working for you, instead of overwhelming you. From senior technology correspondent Adam Clark Estes. The full picture of what humanoids can do is more complicated, however. As James Vincent explained in Harper’s Magazine last month, the promises robotics startups are making often don’t line up with the reality of the technology. I’ve been learning this firsthand as I work on a feature of my own about embodied AI, which recently took me inside a number of labs at MIT. (Stay tuned for that in the coming weeks.) One of the robots I saw there was the 4-foot-tall Unitree G1, which can dance and do backflips. It’s like a mini Atlas, the humanoid robot built by Boston Dynamics that you’ve probably seen on YouTube, but made in China for a fraction of the price. Will Knight recently profiled Unitree for Wired and argued that China, not the United States, is poised to lead the robot revolution on the back of its cheap hardware and ability to iterate on new designs. Still, a dancing robot is not necessarily an intelligent one. If you haven’t heard of a “thing biography,” you’ve definitely come across one of the books. Mauve: How One Man Invented a Colour That Changed the World by Simon Garfield is sometimes credited as the accidental original example of the genre. Cod: A Biography of the Fish That Changed the World is the book that turned me onto it, when it became a bestseller nearly 30 years ago. You can now read thing biographies, also known as microhistories, about bananas, wood, rope — really any thing has a fascinating history that you may find sitting on a shelf at an airport bookshop. (Slate’s Decoder Ring podcast has a great episode explaining the phenomenon.) What makes these books especially fun is that they’re not at all about the things themselves. They’re about us. The history of cod is really about what the fish tells us about exploration and human ingenuity. One of my favorites from the genre is The World in a Grain: The Story of Sand and How It Transformed Civilization. It is nearly 300 pages about sand, which is in fact what everything important, from concrete to microchips, is made of. And we’re running out of it. AI is inherently physical, because it needs hardware to exist. And I’m not just talking about the actuators, motors, and sensors that make machines move. The high-powered Nvidia chips that promise to provide the processing power needed to provide dumb backflipping robots with a brain that can turn them into general-purpose appliances? They’re made of sand. It’s really good sand, of course — sand that’s been purified and processed in some of the most advanced manufacturing facilities humankind has ever built. But as the conversation around advanced hardware powered by even more advanced software is changing our relationship with technology, I find it grounding to know that we’re dealing with familiar ingredients. If you think that sitting around reading books about sand is too escapist, let me offer a compromise. For a dose of reality, you should check out Chip War: The Fight for the World’s Most Critical Technology by Chris Miller. It’s also about sand, but it’s specifically about the history of semiconductors in the United States and the arms race it eventually kicked off with China. As the Trump administration inches closer to attempting to seize Greenland, many are left to worry that China’s Xi Jinping will invade Taiwan and take control of its advanced chipmaking facilities. If China cuts off Taiwan, which produces 90 percent of the advanced chips needed for AI applications, the digital economy would grind to a halt, according to my Vox colleague Joshua Keating. China wouldn’t just lead the robot revolution. It would own it. The robots in my building, I’m guessing, weigh about 120 pounds apiece. It’s an informed guess, because I’ve had to pick them up to move them out of my way. If you move too quickly or intimidate them too much — not that I’ve done this on purpose — they freeze. As a safety feature, this is great. But the other day, I was getting on the elevator, freaked out a robot, and the elevator wouldn’t move. I took the stairs. In a sense, though, these failures are essential. Every couple of weeks, I see a technician come and work on the robots. They might be replacing a part, updating its software, or just giving them a pep talk. It’s a reminder that inching toward a future in which embodied AI, probably robots, helps us unlock humanity’s greatest potential is a process, and probably a long one. Many people credit Elon Musk with starting the race to build a general-purpose humanoid, when he announced Tesla’s effort to do so back in 2021. Musk has shown off various prototypes of the Tesla humanoid, Optimus, in the years since then. Many of them are just puppets, operated by employees behind the scenes. This week, Musk admitted that manufacturing the humanoids would be “agonizingly slow” before it hopefully got faster. I truly wonder, what’s the rush? A version of this story was also published in the User Friendly newsletter. Sign up here so you don’t miss the next one! Understand the world with a daily explainer, plus the most compelling stories of the day. This is the title for the native ad Satellites are our only insight into the ongoing conflict — and worth protecting. The AI coworker is making tech people lose their minds. Here’s what it actually is. The MAGA media system is going into overdrive. Blame AI. Here’s what ChatGPT Health can actually tell you — and what it can’t. We’re finally making progress toward a universal flu vaccine. This is the title for the native ad © 2026 Vox Media, LLC. All Rights Reserved
Images (1): 
|
|||||