AUTOMATION HISTORY
1191
Total Articles Scraped
2288
Total Images Extracted
Scraped Articles
New Automation| Action | Title | URL | Images | Scraped At | Status |
|---|---|---|---|---|---|
| Unitree targets 20,000 humanoid robots with fourfold capacity increase | https://interestingengineering.com/ai-r… | 1 | Feb 20, 2026 00:03 | active | |
Unitree targets 20,000 humanoid robots with fourfold capacity increaseURL: https://interestingengineering.com/ai-robotics/unitree-targets-20000-humanoid-robots Description: The Chinese robotics company plans to ramp up its humanoid production fourfold this year, after shipping 5,000 robots in 2025. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Access expert insights, exclusive content, and a deeper dive into engineering and innovation. Engineering-inspired textiles, mugs, hats, and thoughtful gifts We connect top engineering talent with the world's most innovative companies. We empower professionals with advanced engineering and tech education to grow careers. We recognize outstanding achievements in engineering, innovation, and technology. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation. Engineering-inspired textiles, mugs, hats, and thoughtful gifts We connect top engineering talent with the world's most innovative companies We empower professionals with advanced engineering and tech education to grow careers. We recognize outstanding achievements in engineering, innovation, and technology. All Rights Reserved, IE Media, Inc. The company’s humanoids recently performed complex kung fu routines and somersaults at the Lunar New Year Gala. Chinese company Unitree Robotics plans to ship around 20,000 humanoid robots in 2026, almost four times the 5,500 it shipped last year. The firm’s chief executive, Wang Xingxing, drew global attention after revealing the company’s goals for this year. Unitree’s humanoids made headlines for their dazzling participation in Monday night’s annual Lunar New Year Gala. Last year, Unitree humanoids attracted attention after showcasing basic movements. This year, the machines performed complex actions, such as martial arts routines and leaping from trampolines, underscoring the progress they have made over the past twelve months. Unitree’s WuBot robot performed the martial arts sequence at the event. The H1 robots came next, performing table-vaulting parkour, 3-meter aerial flips, and single-leg flips. The robots also showcased an air flare grand spin of seven-and-a-half rotations and other high-difficulty movements, which marked a significant upgrade from the Yangko dance they performed at the 2025 event. Unitree’s G1 robots performed the kung fu segment without any human intervention at the backend. They also performed trampoline somersaults reaching 3 meters and a running speed of 4 m/s. The H2 humanoids also took part in the event, along with B2-W robot dogs. The Chinese firm implemented systematic upgrades across algorithms, hardware, and systems to deliver the kung fu routine at the event. “These innovations are very practical and will facilitate large-scale group deployment of robots in the future,” Wang told 36Kr, adding that a robot’s fall during the performance had been pre-planned and was a part of the routine. Wang views real-world deployment as the next major challenge for China’s robotics industry. Unitree is already working to embed several embodied AI technologies to develop models that can act as “brains” to help robots navigate complex environments autonomously. Market research firm Omdia estimated that Unitree shipped over 5,500 humanoid robots last year, surpassing the combined output of U.S. competitors including Tesla, Figure AI, and Agility Robotics. Chinese technology analyst Patrick Zhang noted that the Spring Festival Gala provided an ideal stage to showcase humanoid robots at their current level of development, thanks to its controlled setting, flat surfaces, and predictable airflow. “Robots may struggle in real-world environments, but on stage they hold all the advantages,” he said in his Geopolitechs newsletter. The 2026 gala underscores how engineers have advanced beyond basic walking algorithms and achieved movements that resemble human motion. It also demonstrated that the hardware can withstand intense, high-speed operation without mechanical failure. While the leap seems impressive, it’s worth noting that these robots are still operating in controlled entertainment environments. The precision shown on Monday suggests they are ready to be deployed on demanding, real-world tasks. Still, it remains to be seen whether their projected potential matches reality after deployment. Atharva is a full-time content writer with a post-graduate degree in media & amp; entertainment and a graduate degree in electronics & telecommunications. He has written in the sports and technology domains respectively. In his leisure time, Atharva loves learning about digital marketing and watching soccer matches. His main goal behind joining Interesting Engineering is to learn more about how the recent technological advancements are helping human beings on both societal and individual levels in their daily lives. Exclusive content, expert insights and a deeper dive into engineering and tech. No ads, no limits. Exclusive content, expert insights and a deeper dive into engineering and tech. No ads, no limits. Premium Follow
Images (1): 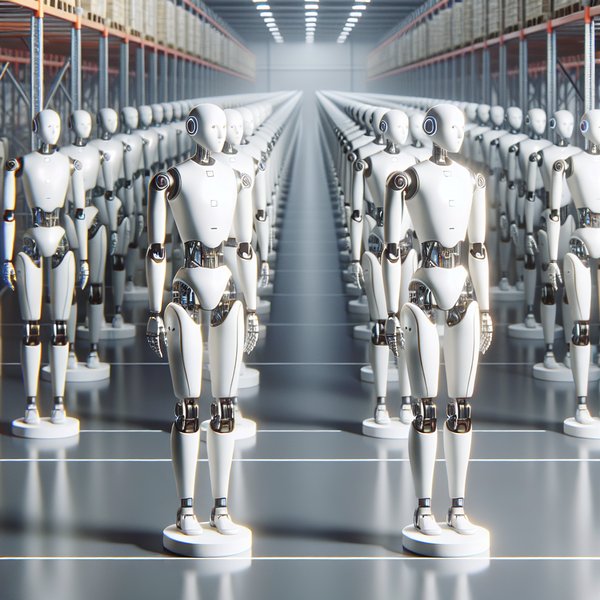
|
|||||
| Fluvo Emotional-Learning Play Robot Isn’t Teaching Kids Rules, It’s Teaching … | https://www.tuvie.com/fluvo-emotional-l… | 1 | Feb 19, 2026 00:03 | active | |
Fluvo Emotional-Learning Play Robot Isn’t Teaching Kids Rules, It’s Teaching Them Feelings - Tuvie DesignDescription: Fluvo Robot for Children doesn’t start with rules. It starts with feelings. At home, moral education usually falls into two extremes: parents are too Content:
Fluvo Robot for Children doesn’t start with rules. It starts with feelings. At home, moral education usually falls into two extremes: parents are too busy, or screens take over. Kids learn what’s “right” by being told what not to do, or by avoiding punishment. Over time, morality turns into a checklist instead of something you actually feel. Fluvo was designed to interrupt that pattern. Instead of explaining what kindness is, Fluvo reacts to it. The idea behind the robot is simple but kind of uncomfortable in a good way: children learn empathy better when they see how their actions affect someone else. Even if that “someone” happens to be a robot. Fluvo responds emotionally to how it’s treated, happy, sad, distant, comforted, and those emotional changes become the lesson. Not through instructions, but through experience. This makes Fluvo feel less like a teaching tool and more like a presence. A companion that can be hurt, reassured, ignored, or cared for. And that emotional back-and-forth is where learning happens. The design leans heavily into softness. Rounded forms, no sharp edges, nothing that looks technical or intimidating. It’s shaped to feel approachable, almost instinctively huggable. That matters more than it sounds, kids are more likely to open up emotionally when they don’t feel like they’re being evaluated. Under the fabric skin, Fluvo uses an LED surface to show expressions, simple graphics, eyebrows, emoji-like reactions. It’s surprisingly effective. The emotions are readable without being overly realistic, which keeps things playful instead of uncanny. Cameras and sensors sit right at eye level, so when a child looks at Fluvo, it actually feels like eye contact, not interaction with a gadget. The arms are another quiet design win. They move forward and back easily, but all the joints are hidden under fabric. No exposed mechanics, no hard edges. It’s safer for kids, sure, but it also helps parents trust the object. Inside, elastic materials prevent harsh creases when the arms bend, and the palms stretch just enough to make holding objects feel natural despite the simple hand shape. One of the most human details is the warmth. Fluvo has a heating element in its chest, so when a child hugs it, it actually feels warm. That single choice shifts the robot from “toy” to “companion.” It’s subtle, but emotionally powerful. The body can also bend forward about 30 degrees to pick things up, and that motion is synced with facial expressions, which gives the robot a strange sense of intention. Even the charger isn’t treated as an afterthought. It doubles as a projector, turning charging time into something calm and imaginative, forests, space, nature scenes. Docking Fluvo becomes part of a routine: play, put things back, rest. It quietly teaches care without saying a word. Fluvo Emotional-Learning Play Robot doesn’t try to replace parents or teachers. It fills the emotional gaps that happen when kids are alone too often, or when morality is reduced to rules and warnings. By letting children experience emotional cause and effect, even through a robot, it reframes “being good” as something you feel, repair, and grow into. And that feels like a much healthier place to start. Designers: Youngjae Jeong, Kim Joonwoo, Hanwool Park, and Sungmin Shin Your email address will not be published. Required fields are marked * Comment * Name * Email * Website Save my name, email, and website in this browser for the next time I comment. Δ This site uses Akismet to reduce spam. Learn how your comment data is processed.
Images (1): 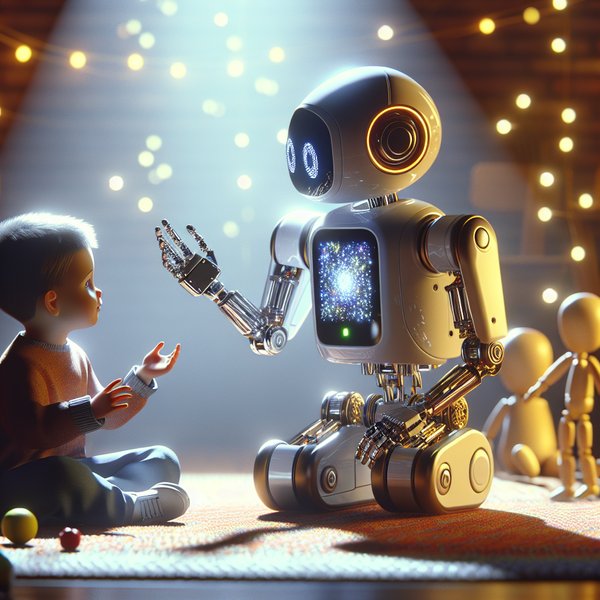
|
|||||
| Los 14 mejores robots educativos para Primaria | https://www.educaciontrespuntocero.com/… | 1 | Feb 18, 2026 16:01 | active | |
Los 14 mejores robots educativos para PrimariaURL: https://www.educaciontrespuntocero.com/tecnologia/robotica-en-educacion-primaria/ Description: Estos robots educativos para Primaria fomentan la creatividad de los alumnos y mejora su capacidad de razonamiento y orientación espacial. Content:
Inicio » Tecnología » Robots para construir y programar en Educación Primaria Desarrollar el pensamiento lógico y la orientación espacial, fomentar la creatividad o apostar por el aprendizaje basado en el ensayo y el error. Estos son algunos de los beneficios que aportan estos robots educativos para Primaria en el aula y en casa. Gracias a los kits para montar robots educativos para Primaria, los estudiantes pueden adentrarse en la robótica y la programación de una manera divertida y práctica. No solo en el aula, donde los docentes pueden plantear proyectos relacionados con materias como ciencia, tecnología, ingeniería o matemáticas; también en casa, como una actividad a compartir en familia y con los amigos. Aún recuerdo cómo mi hija, cuando era más pequeña —ahora tiene 13 años—, se lo pasaba en grande con muchos de los kits que recibía por su cumpleaños o traían los Reyes Magos. Resolviendo cada reto con entusiasmo y creatividad, disfrutaba además de otros muchos beneficios: mejoraba su orientación espacial, aumentaba el nivel de atención y potenciaba su capacidad de razonamiento al enfrentarse a desafíos que requerían soluciones ingeniosas. Esta selección incluye algunos de los mejores robots educativos para Primaria. Índice de contenido: Es posible construir cinco tipos de robots: un coche impulsado por el viento, un tanque, un planeador, un robot que se arrastra y otro que gira automáticamente. Gracias a los motores incluidos y a las herramientas necesarias para el montaje, el alumnado a partir de 6 años se inicia de forma práctica en la mecánica y comprende cómo funcionan conceptos básicos como la transmisión del movimiento, los engranajes o el equilibrio. Ofrece tres opciones de montaje: un tanque, un dinosaurio y un robot con ojos luminosos y articulaciones flexibles capaces de adoptar diferentes poses, lo que permite experimentar con estructuras y movimientos variados. Con más de 460 piezas y recomendado a partir de 8 años, incorpora una batería recargable que proporciona hasta 40 minutos de autonomía. Puede controlarse tanto desde una aplicación móvil que permite explorar modos de conducción y primeras nociones de codificación como mediante un control remoto tradicional. Con este set pueden construir hasta 12 modelos diferentes de robots gracias a sus piezas modulares y a un panel solar que convierte la luz en electricidad, eliminando por completo la necesidad de pilas. Está recomendado para edades entre 7 y 12 años. Se trata de un set de construcción para que los estudiantes, a partir de 9 años, lleven a cabo 32 proyectos disponibles en la wiki de Elecfreaks. Cuentan para ellos con 400 piezas de construcción, una tabla de expansión Wukong, dos motores, un servomotor, sensores de seguimiento de líneas, sensor de ultrasonidos y detector de nivel del agua. Go Kubo! es un robot educativo diseñado para aprender a programar sin necesidad de utilizar pantallas. A través de experiencias prácticas y cercanas a su realidad, los estudiantes desarrollan el pensamiento computacional y lo aplican a la programación. El robot lee unas fichas denominadas TagTiles que contienen un chip en su interior. Así, cuando se coloca sobre ellas, procesa la información que recibe y ejecuta los movimientos indicados. Permite montar hasta 12 robots gracias a sus 230 piezas. Pero esta no es la única característica que lo diferencia de otras propuestas: también incluye un panel solar que aprovecha la luz del sol para que los robots se desplacen y no dependan de una batería. Mientras los estudiantes los montan, tienen la oportunidad de aprender sobre fuentes de energía renovables o cómo se transforma la energía solar en energía eléctrica. Recomendado a partir de 8 años. Indicado a partir de 5 años, este robot imita al Triceratops, un tipo de dinosaurio que se caracteriza por tener una cabeza cubierta de crestas y cuernos en la zona de la frente y la nariz. Una vez montado, las herramientas se incluyen en su caja, unos mecanismos especiales le permiten realizar diferentes movimientos. Está inspirado en la metodología STEM para que los estudiantes a partir de 8 años, además de desarrollar su capacidad de razonamiento, estimulen su creatividad y habilidades manuales. Para ello, este juego les propone construir un robot de 35 piezas y programarlo para que gire a derecha e izquierda, avance y retroceda. Incluye un reloj inteligente con sensor de gravedad para que lo controlen a distancia. Este robot educativo de Makeblock Education está formado por más de 10 módulos electrónicos programables que le permiten realizar movimientos giratorios, seguir líneas, sortear obstáculos… Distribuido por ROBOTIX Hands-on Learning, está equipado con sensores de sonido y de luz, una pantalla matriz de LEDs, un receptor y transmisor de rayos infrarrojos, y giroscopio y acelerómetro. En lo que respecta a su programación, emplea un software por bloques basado en el lenguaje Scratch 3. También se puede integrar con el lenguaje Phyton y cambiar entre ambos. Bloques magnéticos, un temporizador, un micrófono, un ventilador, un zumbador, un motor servo, un inversor, un driver o conductor, una tira de luces LED, plantillas de varias formas… Estos son algunos de los componentes incluidos en este kit de robótica educativa STEM (lo distribuye Ro-bótica) que no precisa de conocimientos en programación. Los alumnos solo tienen que sacar su lado más creativo y combinar sus piezas hexagonales con las herramientas de electricidad, sonido y luz incluidas. Con un programador remoto que transmite los comandos, su programación le permite ejecutar una serie de pasos, desplazarse por una pista de obstáculos mientras los esquiva o desbloquear funciones adicionales que permanecen ocultas. Incluye 40 tarjetas de codificación con las que, además, es posible crear una línea que el robot puede seguir gracias al sensor que integra en su base. Los niños cuentan también con una guía de actividades. Ver en Amazon Este kit, recomendado a partir de 10 años, incluye más de 500 piezas LEGO, un hub de gran tamaño, dos motores, tres sensores (distancia, fuerza y color) y dos ruedas que minimizan la fricción y mejoran la precisión de los desplazamientos. Además, viene con un contenedor de almacenamiento y dos bandejas de clasificación con etiquetas para guardar de forma organizada todos los componentes. Se utiliza junto con la aplicación SPIKE Prime, que ofrece más de 40 actividades y permite programar de manera intuitiva gracias a un entorno basado en Scratch. Es una evolución del robot mBot de Makeblock Education que incluye, además, un entorno de programación y varias actividades. En concreto, los alumnos pueden iniciarse en la programación con bloques y de manera progresiva avanzar a la programación orientada a objetos como Python. El cerebro de este robot, distribuido por ROBOTIX Hands-on Learning, es el microcontrolador Cyber-Pi que ofrece capacidades de red, pantalla a color, sensores y una batería recargable. El aprendizaje que adquieren no solo está relacionado con la robótica y la programación, sino con otras áreas como la inteligencia artificial, la ciencia de los datos y las materias STEAM. En este vídeo se puede comprobar cómo funciona. Reúne más de un centenar de piezas para que los más pequeños puedan dejar volar su imaginación y monten un robot según sus gustos. Con un motor que permite que se desplace por sí solo, incluye un manual ilustrado donde se sugieren varias ideas para ayudarles a conocer algunos de los principios básicos no solo de la robótica, sino de la física y la ingeniería. La familia Surface crece con seis nuevos dispositivos ¡Estos son los mejores monitores interactivos para el aula! Ampliar la cobertura de Internet es sencillo con esta selección de sistemas PLC 1 Comentario Muy interesante el articulo sobre los robots para construir programas en educación primaria, ya que los niños de la actualidad traen consigo el manejo y manipulación de las tecnologías, además estos artículos promueven la creatividad y fomentan la motivación de los alumnos. Por otro lado, son herramientas valiosas para el docente ya que puede crear proyectos enfocados a la ingeniería, la matemática y la robótica. Una desventaja que veo en estos robots es el presupuesto con el que cuenta cada institución, considero que es una gran barrera para poder acceder a estos artículos. Tu dirección de correo electrónico no será publicada. Los campos obligatorios están marcados con * Comentario * Nombre * Correo electrónico * Δ Somos el medio de comunicación líder en innovación educativa. Nuestro objetivo es acompañar a la comunidad educativa en la necesaria transformación de la educación para adaptarse a la nueva realidad de la sociedad del siglo XXI. Política de privacidad | Política de cookies | Aviso legal
Images (1): 
|
|||||
| 9 Secrets Behind Building AI Chatbots That Don’t Sound Like … | https://medium.com/@arfaali/9-secrets-b… | 0 | Feb 18, 2026 16:01 | active | |
9 Secrets Behind Building AI Chatbots That Don’t Sound Like RobotsDescription: The hype around AI chatbots is real. They’re everywhere in customer support, on websites, even sliding into your DMs with suspiciously human-like replies. But... Content: |
|||||
| Robots, la única manera que ha encontrado OK Go para … | https://andro4all.com/robots/robots-la-… | 1 | Feb 18, 2026 16:01 | active | |
Robots, la única manera que ha encontrado OK Go para grabar su videoclip más espectacular hasta la fechaDescription: OK Go, para quien no lo conozca, es un grupo de rock alternativo y pop americano la cual, además de por sus melodiosas y con buena letra canciones, destaca por Content:
OK Go, para quien no lo conozca, es un grupo de rock alternativo y pop americano la cual, además de por sus melodiosas y con buena letra canciones, destaca por los videoclips que muchas veces acompañan a estas, siendo varios de ellos de los más ingeniosos y difíciles de rodar que hemos visto.RobotsMejores robots aspiradoresHistoria de los robots aspiradoresXiaomi CyberdogY de planear, porque eso es precisamente lo que los distingue, ya que suelen estar grabados en una sola toma; a veces con varios planos como Needing/Getting, pero de una vez.Por recomendar, cualquiera es digno de vuestra atención y tiempo, pero si tenemos que quedarnos con alguno, o algunos porque es imposible elegir un único clip, tienen que ser A Million Ways y Here It Goes Again. Lo sabemos, somos clásicos.Pero también elegiríamos sin despeinarnos su último clip hasta la fecha, el que acompaña al tema Love, perteneciente al álbum And the Adjacent Possible, de 2025, su primer disco en más de 10 años.Cómo se hizoRodado en una enorme estación de tren de Budapest y planteado, como es habitual en el grupo, en un único plano secuencia, el videoclip lleva el concepto de coreografía técnica a un nuevo nivel gracias al uso de más de 30 brazos robóticos perfectamente sincronizados con la música.El videoclip de Love estuvo codirigido por Damian Kulash, Aaron Duffy y Miguel Espada, y desde el inicio se concibió como una pieza basada en espejos y múltiples reflejos. La idea era sencilla en apariencia: utilizar superficies reflectantes para multiplicar la imagen y generar la sensación de infinito. El problema es que, para que ese efecto funcione, los espejos deben estar colocados con una precisión absoluta, pues un mínimo desajuste rompería la ilusión.Fuera del alcance de la mano del hombreAhí es donde entraron en juego los robots de Universal Robots. Según explica Espada, lograr ese nivel de exactitud con métodos analógicos tradicionales no era viable, especialmente cuando los espejos debían moverse y transformarse durante el plano. La solución fue recurrir a brazos robóticos colaborativos, capaces de posicionarse con extrema precisión y de hacerlo, además, de forma segura en un set lleno de personas, cámaras y superficies frágiles.Antes del rodaje definitivo se realizaron varios talleres de pruebas, primero solo con robots y después combinándolos con espejos, para diseñar y ajustar cada movimiento. La facilidad de uso fue clave: los robots podían ser programados manualmente por el propio equipo mediante un modelo de enseñanza intuitivo, lo que permitió una colaboración constante entre técnicos, realizadores y la propia banda.La sincronización fue otro de los grandes retos. Más de 30 robots debían moverse al ritmo exacto de la canción, que tiene un tempo de 78 BPM. Para ello, el equipo desarrolló un sistema de control específico, con una capa de programación en Python y otra en C++, que permitía coordinar todos los movimientos como si se tratara de una coreografía musical.Hicieron falta más tomas que máquinasEl rodaje se concentró en apenas dos días, con constantes ajustes entre toma y toma. Tras numerosos intentos y refinamientos, el plano definitivo llegó en la toma número 39. Un cierre casi poético para un videoclip que demuestra, una vez más, que en el universo de OK Go la tecnología no sustituye a la creatividad, sino que la lleva un paso más allá.Únete a la conversación Bueno, bonito y barato: uno de los patinetes eléctricos más vendidos de Amazon ha bajado de precio y es la opción perfecta si necesitas moverte por la ciudad Samsung te permitirá crear stickers personalizados en los Galaxy S26 usando inteligencia artificial Anthropic lanza Claude Sonnet 4.6: rendimiento al nivel de Opus y menor coste operacional Oferta única e irrechazable: Samsung Galaxy S24 Ultra por 550 euros con 5 años de actualizaciones restantes Se filtran las posibles especificaciones del Nothing Phone (4a). Otra vezChina adelanta a todos en la carrera de la robótica: presentan el robot humanoide más rápido del mundo, capaz de correr a 10 metros por segundo Navimow trae a España sus cortacéspedes robóticos con guiado RTK Robots, la única manera que ha encontrado OK Go para grabar su videoclip más espectacular hasta la fecha China cruza el valle inquietante: presentan a Moya, un robot con piel caliente y microexpresiones que te mira a los ojos La marca de los Roomba cambia de dueño y seguirá operando Y de planear, porque eso es precisamente lo que los distingue, ya que suelen estar grabados en una sola toma; a veces con varios planos como Needing/Getting, pero de una vez.Por recomendar, cualquiera es digno de vuestra atención y tiempo, pero si tenemos que quedarnos con alguno, o algunos porque es imposible elegir un único clip, tienen que ser A Million Ways y Here It Goes Again. Lo sabemos, somos clásicos.Pero también elegiríamos sin despeinarnos su último clip hasta la fecha, el que acompaña al tema Love, perteneciente al álbum And the Adjacent Possible, de 2025, su primer disco en más de 10 años.Cómo se hizoRodado en una enorme estación de tren de Budapest y planteado, como es habitual en el grupo, en un único plano secuencia, el videoclip lleva el concepto de coreografía técnica a un nuevo nivel gracias al uso de más de 30 brazos robóticos perfectamente sincronizados con la música.El videoclip de Love estuvo codirigido por Damian Kulash, Aaron Duffy y Miguel Espada, y desde el inicio se concibió como una pieza basada en espejos y múltiples reflejos. La idea era sencilla en apariencia: utilizar superficies reflectantes para multiplicar la imagen y generar la sensación de infinito. El problema es que, para que ese efecto funcione, los espejos deben estar colocados con una precisión absoluta, pues un mínimo desajuste rompería la ilusión.Fuera del alcance de la mano del hombreAhí es donde entraron en juego los robots de Universal Robots. Según explica Espada, lograr ese nivel de exactitud con métodos analógicos tradicionales no era viable, especialmente cuando los espejos debían moverse y transformarse durante el plano. La solución fue recurrir a brazos robóticos colaborativos, capaces de posicionarse con extrema precisión y de hacerlo, además, de forma segura en un set lleno de personas, cámaras y superficies frágiles.Antes del rodaje definitivo se realizaron varios talleres de pruebas, primero solo con robots y después combinándolos con espejos, para diseñar y ajustar cada movimiento. La facilidad de uso fue clave: los robots podían ser programados manualmente por el propio equipo mediante un modelo de enseñanza intuitivo, lo que permitió una colaboración constante entre técnicos, realizadores y la propia banda.La sincronización fue otro de los grandes retos. Más de 30 robots debían moverse al ritmo exacto de la canción, que tiene un tempo de 78 BPM. Para ello, el equipo desarrolló un sistema de control específico, con una capa de programación en Python y otra en C++, que permitía coordinar todos los movimientos como si se tratara de una coreografía musical.Hicieron falta más tomas que máquinasEl rodaje se concentró en apenas dos días, con constantes ajustes entre toma y toma. Tras numerosos intentos y refinamientos, el plano definitivo llegó en la toma número 39. Un cierre casi poético para un videoclip que demuestra, una vez más, que en el universo de OK Go la tecnología no sustituye a la creatividad, sino que la lleva un paso más allá.Únete a la conversación Bueno, bonito y barato: uno de los patinetes eléctricos más vendidos de Amazon ha bajado de precio y es la opción perfecta si necesitas moverte por la ciudad Samsung te permitirá crear stickers personalizados en los Galaxy S26 usando inteligencia artificial Anthropic lanza Claude Sonnet 4.6: rendimiento al nivel de Opus y menor coste operacional Oferta única e irrechazable: Samsung Galaxy S24 Ultra por 550 euros con 5 años de actualizaciones restantes Se filtran las posibles especificaciones del Nothing Phone (4a). Otra vezChina adelanta a todos en la carrera de la robótica: presentan el robot humanoide más rápido del mundo, capaz de correr a 10 metros por segundo Navimow trae a España sus cortacéspedes robóticos con guiado RTK Robots, la única manera que ha encontrado OK Go para grabar su videoclip más espectacular hasta la fecha China cruza el valle inquietante: presentan a Moya, un robot con piel caliente y microexpresiones que te mira a los ojos La marca de los Roomba cambia de dueño y seguirá operando Por recomendar, cualquiera es digno de vuestra atención y tiempo, pero si tenemos que quedarnos con alguno, o algunos porque es imposible elegir un único clip, tienen que ser A Million Ways y Here It Goes Again. Lo sabemos, somos clásicos.Pero también elegiríamos sin despeinarnos su último clip hasta la fecha, el que acompaña al tema Love, perteneciente al álbum And the Adjacent Possible, de 2025, su primer disco en más de 10 años.Cómo se hizoRodado en una enorme estación de tren de Budapest y planteado, como es habitual en el grupo, en un único plano secuencia, el videoclip lleva el concepto de coreografía técnica a un nuevo nivel gracias al uso de más de 30 brazos robóticos perfectamente sincronizados con la música.El videoclip de Love estuvo codirigido por Damian Kulash, Aaron Duffy y Miguel Espada, y desde el inicio se concibió como una pieza basada en espejos y múltiples reflejos. La idea era sencilla en apariencia: utilizar superficies reflectantes para multiplicar la imagen y generar la sensación de infinito. El problema es que, para que ese efecto funcione, los espejos deben estar colocados con una precisión absoluta, pues un mínimo desajuste rompería la ilusión.Fuera del alcance de la mano del hombreAhí es donde entraron en juego los robots de Universal Robots. Según explica Espada, lograr ese nivel de exactitud con métodos analógicos tradicionales no era viable, especialmente cuando los espejos debían moverse y transformarse durante el plano. La solución fue recurrir a brazos robóticos colaborativos, capaces de posicionarse con extrema precisión y de hacerlo, además, de forma segura en un set lleno de personas, cámaras y superficies frágiles.Antes del rodaje definitivo se realizaron varios talleres de pruebas, primero solo con robots y después combinándolos con espejos, para diseñar y ajustar cada movimiento. La facilidad de uso fue clave: los robots podían ser programados manualmente por el propio equipo mediante un modelo de enseñanza intuitivo, lo que permitió una colaboración constante entre técnicos, realizadores y la propia banda.La sincronización fue otro de los grandes retos. Más de 30 robots debían moverse al ritmo exacto de la canción, que tiene un tempo de 78 BPM. Para ello, el equipo desarrolló un sistema de control específico, con una capa de programación en Python y otra en C++, que permitía coordinar todos los movimientos como si se tratara de una coreografía musical.Hicieron falta más tomas que máquinasEl rodaje se concentró en apenas dos días, con constantes ajustes entre toma y toma. Tras numerosos intentos y refinamientos, el plano definitivo llegó en la toma número 39. Un cierre casi poético para un videoclip que demuestra, una vez más, que en el universo de OK Go la tecnología no sustituye a la creatividad, sino que la lleva un paso más allá.Únete a la conversación Bueno, bonito y barato: uno de los patinetes eléctricos más vendidos de Amazon ha bajado de precio y es la opción perfecta si necesitas moverte por la ciudad Samsung te permitirá crear stickers personalizados en los Galaxy S26 usando inteligencia artificial Anthropic lanza Claude Sonnet 4.6: rendimiento al nivel de Opus y menor coste operacional Oferta única e irrechazable: Samsung Galaxy S24 Ultra por 550 euros con 5 años de actualizaciones restantes Se filtran las posibles especificaciones del Nothing Phone (4a). Otra vezChina adelanta a todos en la carrera de la robótica: presentan el robot humanoide más rápido del mundo, capaz de correr a 10 metros por segundo Navimow trae a España sus cortacéspedes robóticos con guiado RTK Robots, la única manera que ha encontrado OK Go para grabar su videoclip más espectacular hasta la fecha China cruza el valle inquietante: presentan a Moya, un robot con piel caliente y microexpresiones que te mira a los ojos La marca de los Roomba cambia de dueño y seguirá operando Pero también elegiríamos sin despeinarnos su último clip hasta la fecha, el que acompaña al tema Love, perteneciente al álbum And the Adjacent Possible, de 2025, su primer disco en más de 10 años.Cómo se hizoRodado en una enorme estación de tren de Budapest y planteado, como es habitual en el grupo, en un único plano secuencia, el videoclip lleva el concepto de coreografía técnica a un nuevo nivel gracias al uso de más de 30 brazos robóticos perfectamente sincronizados con la música.El videoclip de Love estuvo codirigido por Damian Kulash, Aaron Duffy y Miguel Espada, y desde el inicio se concibió como una pieza basada en espejos y múltiples reflejos. La idea era sencilla en apariencia: utilizar superficies reflectantes para multiplicar la imagen y generar la sensación de infinito. El problema es que, para que ese efecto funcione, los espejos deben estar colocados con una precisión absoluta, pues un mínimo desajuste rompería la ilusión.Fuera del alcance de la mano del hombreAhí es donde entraron en juego los robots de Universal Robots. Según explica Espada, lograr ese nivel de exactitud con métodos analógicos tradicionales no era viable, especialmente cuando los espejos debían moverse y transformarse durante el plano. La solución fue recurrir a brazos robóticos colaborativos, capaces de posicionarse con extrema precisión y de hacerlo, además, de forma segura en un set lleno de personas, cámaras y superficies frágiles.Antes del rodaje definitivo se realizaron varios talleres de pruebas, primero solo con robots y después combinándolos con espejos, para diseñar y ajustar cada movimiento. La facilidad de uso fue clave: los robots podían ser programados manualmente por el propio equipo mediante un modelo de enseñanza intuitivo, lo que permitió una colaboración constante entre técnicos, realizadores y la propia banda.La sincronización fue otro de los grandes retos. Más de 30 robots debían moverse al ritmo exacto de la canción, que tiene un tempo de 78 BPM. Para ello, el equipo desarrolló un sistema de control específico, con una capa de programación en Python y otra en C++, que permitía coordinar todos los movimientos como si se tratara de una coreografía musical.Hicieron falta más tomas que máquinasEl rodaje se concentró en apenas dos días, con constantes ajustes entre toma y toma. Tras numerosos intentos y refinamientos, el plano definitivo llegó en la toma número 39. Un cierre casi poético para un videoclip que demuestra, una vez más, que en el universo de OK Go la tecnología no sustituye a la creatividad, sino que la lleva un paso más allá.Únete a la conversación Bueno, bonito y barato: uno de los patinetes eléctricos más vendidos de Amazon ha bajado de precio y es la opción perfecta si necesitas moverte por la ciudad Samsung te permitirá crear stickers personalizados en los Galaxy S26 usando inteligencia artificial Anthropic lanza Claude Sonnet 4.6: rendimiento al nivel de Opus y menor coste operacional Oferta única e irrechazable: Samsung Galaxy S24 Ultra por 550 euros con 5 años de actualizaciones restantes Se filtran las posibles especificaciones del Nothing Phone (4a). Otra vezChina adelanta a todos en la carrera de la robótica: presentan el robot humanoide más rápido del mundo, capaz de correr a 10 metros por segundo Navimow trae a España sus cortacéspedes robóticos con guiado RTK Robots, la única manera que ha encontrado OK Go para grabar su videoclip más espectacular hasta la fecha China cruza el valle inquietante: presentan a Moya, un robot con piel caliente y microexpresiones que te mira a los ojos La marca de los Roomba cambia de dueño y seguirá operando Rodado en una enorme estación de tren de Budapest y planteado, como es habitual en el grupo, en un único plano secuencia, el videoclip lleva el concepto de coreografía técnica a un nuevo nivel gracias al uso de más de 30 brazos robóticos perfectamente sincronizados con la música. El videoclip de Love estuvo codirigido por Damian Kulash, Aaron Duffy y Miguel Espada, y desde el inicio se concibió como una pieza basada en espejos y múltiples reflejos. La idea era sencilla en apariencia: utilizar superficies reflectantes para multiplicar la imagen y generar la sensación de infinito. El problema es que, para que ese efecto funcione, los espejos deben estar colocados con una precisión absoluta, pues un mínimo desajuste rompería la ilusión.Fuera del alcance de la mano del hombreAhí es donde entraron en juego los robots de Universal Robots. Según explica Espada, lograr ese nivel de exactitud con métodos analógicos tradicionales no era viable, especialmente cuando los espejos debían moverse y transformarse durante el plano. La solución fue recurrir a brazos robóticos colaborativos, capaces de posicionarse con extrema precisión y de hacerlo, además, de forma segura en un set lleno de personas, cámaras y superficies frágiles.Antes del rodaje definitivo se realizaron varios talleres de pruebas, primero solo con robots y después combinándolos con espejos, para diseñar y ajustar cada movimiento. La facilidad de uso fue clave: los robots podían ser programados manualmente por el propio equipo mediante un modelo de enseñanza intuitivo, lo que permitió una colaboración constante entre técnicos, realizadores y la propia banda.La sincronización fue otro de los grandes retos. Más de 30 robots debían moverse al ritmo exacto de la canción, que tiene un tempo de 78 BPM. Para ello, el equipo desarrolló un sistema de control específico, con una capa de programación en Python y otra en C++, que permitía coordinar todos los movimientos como si se tratara de una coreografía musical.Hicieron falta más tomas que máquinasEl rodaje se concentró en apenas dos días, con constantes ajustes entre toma y toma. Tras numerosos intentos y refinamientos, el plano definitivo llegó en la toma número 39. Un cierre casi poético para un videoclip que demuestra, una vez más, que en el universo de OK Go la tecnología no sustituye a la creatividad, sino que la lleva un paso más allá.Únete a la conversación Bueno, bonito y barato: uno de los patinetes eléctricos más vendidos de Amazon ha bajado de precio y es la opción perfecta si necesitas moverte por la ciudad Samsung te permitirá crear stickers personalizados en los Galaxy S26 usando inteligencia artificial Anthropic lanza Claude Sonnet 4.6: rendimiento al nivel de Opus y menor coste operacional Oferta única e irrechazable: Samsung Galaxy S24 Ultra por 550 euros con 5 años de actualizaciones restantes Se filtran las posibles especificaciones del Nothing Phone (4a). Otra vezChina adelanta a todos en la carrera de la robótica: presentan el robot humanoide más rápido del mundo, capaz de correr a 10 metros por segundo Navimow trae a España sus cortacéspedes robóticos con guiado RTK Robots, la única manera que ha encontrado OK Go para grabar su videoclip más espectacular hasta la fecha China cruza el valle inquietante: presentan a Moya, un robot con piel caliente y microexpresiones que te mira a los ojos La marca de los Roomba cambia de dueño y seguirá operando Ahí es donde entraron en juego los robots de Universal Robots. Según explica Espada, lograr ese nivel de exactitud con métodos analógicos tradicionales no era viable, especialmente cuando los espejos debían moverse y transformarse durante el plano. La solución fue recurrir a brazos robóticos colaborativos, capaces de posicionarse con extrema precisión y de hacerlo, además, de forma segura en un set lleno de personas, cámaras y superficies frágiles.Antes del rodaje definitivo se realizaron varios talleres de pruebas, primero solo con robots y después combinándolos con espejos, para diseñar y ajustar cada movimiento. La facilidad de uso fue clave: los robots podían ser programados manualmente por el propio equipo mediante un modelo de enseñanza intuitivo, lo que permitió una colaboración constante entre técnicos, realizadores y la propia banda.La sincronización fue otro de los grandes retos. Más de 30 robots debían moverse al ritmo exacto de la canción, que tiene un tempo de 78 BPM. Para ello, el equipo desarrolló un sistema de control específico, con una capa de programación en Python y otra en C++, que permitía coordinar todos los movimientos como si se tratara de una coreografía musical.Hicieron falta más tomas que máquinasEl rodaje se concentró en apenas dos días, con constantes ajustes entre toma y toma. Tras numerosos intentos y refinamientos, el plano definitivo llegó en la toma número 39. Un cierre casi poético para un videoclip que demuestra, una vez más, que en el universo de OK Go la tecnología no sustituye a la creatividad, sino que la lleva un paso más allá.Únete a la conversación Bueno, bonito y barato: uno de los patinetes eléctricos más vendidos de Amazon ha bajado de precio y es la opción perfecta si necesitas moverte por la ciudad Samsung te permitirá crear stickers personalizados en los Galaxy S26 usando inteligencia artificial Anthropic lanza Claude Sonnet 4.6: rendimiento al nivel de Opus y menor coste operacional Oferta única e irrechazable: Samsung Galaxy S24 Ultra por 550 euros con 5 años de actualizaciones restantes Se filtran las posibles especificaciones del Nothing Phone (4a). Otra vezChina adelanta a todos en la carrera de la robótica: presentan el robot humanoide más rápido del mundo, capaz de correr a 10 metros por segundo Navimow trae a España sus cortacéspedes robóticos con guiado RTK Robots, la única manera que ha encontrado OK Go para grabar su videoclip más espectacular hasta la fecha China cruza el valle inquietante: presentan a Moya, un robot con piel caliente y microexpresiones que te mira a los ojos La marca de los Roomba cambia de dueño y seguirá operando Antes del rodaje definitivo se realizaron varios talleres de pruebas, primero solo con robots y después combinándolos con espejos, para diseñar y ajustar cada movimiento. La facilidad de uso fue clave: los robots podían ser programados manualmente por el propio equipo mediante un modelo de enseñanza intuitivo, lo que permitió una colaboración constante entre técnicos, realizadores y la propia banda.La sincronización fue otro de los grandes retos. Más de 30 robots debían moverse al ritmo exacto de la canción, que tiene un tempo de 78 BPM. Para ello, el equipo desarrolló un sistema de control específico, con una capa de programación en Python y otra en C++, que permitía coordinar todos los movimientos como si se tratara de una coreografía musical.Hicieron falta más tomas que máquinasEl rodaje se concentró en apenas dos días, con constantes ajustes entre toma y toma. Tras numerosos intentos y refinamientos, el plano definitivo llegó en la toma número 39. Un cierre casi poético para un videoclip que demuestra, una vez más, que en el universo de OK Go la tecnología no sustituye a la creatividad, sino que la lleva un paso más allá.Únete a la conversación Bueno, bonito y barato: uno de los patinetes eléctricos más vendidos de Amazon ha bajado de precio y es la opción perfecta si necesitas moverte por la ciudad Samsung te permitirá crear stickers personalizados en los Galaxy S26 usando inteligencia artificial Anthropic lanza Claude Sonnet 4.6: rendimiento al nivel de Opus y menor coste operacional Oferta única e irrechazable: Samsung Galaxy S24 Ultra por 550 euros con 5 años de actualizaciones restantes Se filtran las posibles especificaciones del Nothing Phone (4a). Otra vezChina adelanta a todos en la carrera de la robótica: presentan el robot humanoide más rápido del mundo, capaz de correr a 10 metros por segundo Navimow trae a España sus cortacéspedes robóticos con guiado RTK Robots, la única manera que ha encontrado OK Go para grabar su videoclip más espectacular hasta la fecha China cruza el valle inquietante: presentan a Moya, un robot con piel caliente y microexpresiones que te mira a los ojos La marca de los Roomba cambia de dueño y seguirá operando La sincronización fue otro de los grandes retos. Más de 30 robots debían moverse al ritmo exacto de la canción, que tiene un tempo de 78 BPM. Para ello, el equipo desarrolló un sistema de control específico, con una capa de programación en Python y otra en C++, que permitía coordinar todos los movimientos como si se tratara de una coreografía musical.Hicieron falta más tomas que máquinasEl rodaje se concentró en apenas dos días, con constantes ajustes entre toma y toma. Tras numerosos intentos y refinamientos, el plano definitivo llegó en la toma número 39. Un cierre casi poético para un videoclip que demuestra, una vez más, que en el universo de OK Go la tecnología no sustituye a la creatividad, sino que la lleva un paso más allá.Únete a la conversación Bueno, bonito y barato: uno de los patinetes eléctricos más vendidos de Amazon ha bajado de precio y es la opción perfecta si necesitas moverte por la ciudad Samsung te permitirá crear stickers personalizados en los Galaxy S26 usando inteligencia artificial Anthropic lanza Claude Sonnet 4.6: rendimiento al nivel de Opus y menor coste operacional Oferta única e irrechazable: Samsung Galaxy S24 Ultra por 550 euros con 5 años de actualizaciones restantes Se filtran las posibles especificaciones del Nothing Phone (4a). Otra vezChina adelanta a todos en la carrera de la robótica: presentan el robot humanoide más rápido del mundo, capaz de correr a 10 metros por segundo Navimow trae a España sus cortacéspedes robóticos con guiado RTK Robots, la única manera que ha encontrado OK Go para grabar su videoclip más espectacular hasta la fecha China cruza el valle inquietante: presentan a Moya, un robot con piel caliente y microexpresiones que te mira a los ojos La marca de los Roomba cambia de dueño y seguirá operando El rodaje se concentró en apenas dos días, con constantes ajustes entre toma y toma. Tras numerosos intentos y refinamientos, el plano definitivo llegó en la toma número 39. Un cierre casi poético para un videoclip que demuestra, una vez más, que en el universo de OK Go la tecnología no sustituye a la creatividad, sino que la lleva un paso más allá.Únete a la conversación Bueno, bonito y barato: uno de los patinetes eléctricos más vendidos de Amazon ha bajado de precio y es la opción perfecta si necesitas moverte por la ciudad Samsung te permitirá crear stickers personalizados en los Galaxy S26 usando inteligencia artificial Anthropic lanza Claude Sonnet 4.6: rendimiento al nivel de Opus y menor coste operacional Oferta única e irrechazable: Samsung Galaxy S24 Ultra por 550 euros con 5 años de actualizaciones restantes Se filtran las posibles especificaciones del Nothing Phone (4a). Otra vezChina adelanta a todos en la carrera de la robótica: presentan el robot humanoide más rápido del mundo, capaz de correr a 10 metros por segundo Navimow trae a España sus cortacéspedes robóticos con guiado RTK Robots, la única manera que ha encontrado OK Go para grabar su videoclip más espectacular hasta la fecha China cruza el valle inquietante: presentan a Moya, un robot con piel caliente y microexpresiones que te mira a los ojos La marca de los Roomba cambia de dueño y seguirá operando
Images (1): 
|
|||||
| The Impact of Canonical LLM Tags on AI Content Selection | https://www.singlegrain.com/marketing-s… | 1 | Feb 18, 2026 08:00 | active | |
The Impact of Canonical LLM Tags on AI Content SelectionURL: https://www.singlegrain.com/marketing-strategy/the-impact-of-canonical-tags-on-ai-content-selection/ Description: Learn how canonical LLM behavior shapes AI source selection and SEO. Discover how to align canonical tags with LLMs to protect visibility. Content:
AI SEO that plans, writes & ranks - 90+ hours/month saved Personalized LinkedIn ads in minutes, not weeks. 40% higher B2B conversions. The canonical LLM behavior is already shaping which pages AI assistants treat as the “one true” version of your content, even though most SEO teams still think about canonical tags only in relation to search rankings. As large language models and AI Overviews synthesize answers from multiple near-duplicate URLs, they implicitly decide which version is canonical in their internal knowledge graph. Understanding how canonical tags interact with these AI-driven selection processes is now critical if you care about visibility, attribution, and traffic from AI search experiences. This article unpacks how canonicalization influences AI content selection, where traditional best practices break down, and how to design a nuanced strategy that keeps your preferred URLs front and center in LLM-powered answers. Advance Your Marketing TABLE OF CONTENTS:Canonical tags and AI source selection basicsHow LLMs build a canonical view of your contentLLM content-selection signals and the role of canonical tagsWhere canonical tags fit into canonical LLM decisionsCanonical nuance in the AI era: Key edge casesSyndication and scraped copies stealing your AI attributionVariants, filters, and multi-regional contentBuilding an AI-aware canonical LLM strategyStep-by-step canonical LLM audit frameworkCoordinating SEO, content, and engineering teamsMake canonical decisions that AI cannot ignore Canonical tags and AI source selection basics Canonical tags were designed to solve a very human SEO problem: multiple URLs serving substantially the same content. Adding a rel=”canonical” link to the preferred URL will tell crawlers which version should consolidate link equity, be indexed, and appear in search results. Answer engines and LLMs inherit this signal, but they do not rely on it exclusively. Instead, canonical tags act as one hint among many when an AI system has to choose which page to crawl, quote, and attribute in an AI-generated answer. That means correct canonicalization is still necessary, but no longer sufficient, for protecting your source visibility. How LLMs build a canonical view of your content LLMs build a “canonical view” of the web in two main phases: training and retrieval. During training, they ingest massive amounts of data, compress overlapping documents into shared representations, and effectively merge near-duplicates into a single internal concept. Later, at retrieval time, answer engines fetch current pages to ground or refresh those concepts before generating responses. When multiple URLs cover similar ground, the system clusters them together and evaluates which one is most trustworthy, current, and useful as a grounding source. Canonical tags can nudge that choice toward your preferred URL, but the model will also weigh other cues such as site authority, page performance, topical focus, and user interaction patterns on AI search surfaces. LLM content-selection signals and the role of canonical tags When an LLM-backed engine assembles an answer, it effectively runs an internal ranking algorithm to select potential sources. Canonical tags work as a technical signal in that process, but they must compete with content relevance, authority, and performance metrics. On-page SEO accounts for 41.80% of SEO services revenue, highlighting how much commercial value hinges on getting signals like canonicalization right for both traditional search engines and AI-driven retrieval systems. Where canonical tags fit into canonical LLM decisions To understand canonical LLM source selection, it helps to see where rel=”canonical” sits among other signal categories that answer engines consider when choosing which URL to ground an answer in. Technical signals: Canonical tags, hreflang, redirects, robots directives, and XML sitemaps tell crawlers which URLs you prefer and how they relate. Content-level signals: Clear structure, concise answers, depth of coverage, and up-to-date information determine how well a page satisfies a specific prompt or question. Site-level signals: Overall authority, topical focus, and entity clarity help models decide whether your domain is a credible canonical source on a subject. Experience and performance signals: Fast load times, stable layouts, and low error rates make it more likely that AI overviews can reliably fetch and parse your canonical page. In practice, this means a perfectly configured canonical tag can still lose the canonical LLM decision to a faster, clearer, or more authoritative page in the same duplicate cluster. Technical performance signals such as Core Web Vitals and load time can determine whether an AI Overview even attempts to use your preferred URL, as explored in depth in this analysis of how page speed impacts LLM content selection. Site architecture is equally important. Aligning your internal links and taxonomy with clusters of related questions helps models connect your pages into a coherent topic graph, similar to the approach described in this guide on aligning site architecture to LLM knowledge models, which strengthens the case for your preferred URLs as the canonical sources. Canonical nuance in the AI era: Key edge cases Traditional canonical best practices assume a search engine that closely follows rel=”canonical” and displays a single blue link for each query. In the AI era, answers are synthesized, sources are mixed, and attribution rules are fuzzier, exposing nuanced scenarios in which yesterday’s canonical decisions can hurt today’s AI visibility. 75% of marketers now use AI tools to reduce time spent on manual tasks like meta-tag optimization, so large-scale canonical errors can spread quickly if those tools are not guided by clear AI-aware policies. Syndication and scraped copies stealing your AI attribution One of the most painful edge cases is syndication. Imagine you publish a definitive guide, then a high-authority partner republishes it with a cross-domain canonical pointing back to you. Search engines may consolidate ranking signals to your original URL, yet AI overviews and chat-style answers may still quote or link to the syndication partner instead. From the model’s perspective, the partner domain may have stronger brand authority, more historic citations, or better engagement, so it wins the canonical LLM decision even though the canonical tag points elsewhere. To mitigate this, you need more than technical alignment: structured author data, explicit source credit, consistent branding, and entity-focused work such as LLM disambiguation SEO all help the model understand that your organization is the true origin. Variants, filters, and multi-regional content E-commerce and multi-regional sites face another subtle challenge. Classic SEO advice often recommends canonicalizing filtered, parameterized, or variant URLs (e.g., color or size variations) to a main product page to avoid thin or duplicate content in search indexes. However, AI answers sometimes need variant-specific details that only exist on those non-canonical URLs. Similarly, international sites juggle hreflang with canonicalization. You may correctly canonicalize regional URLs to a master version for crawl efficiency, yet want region-specific pricing or regulatory information to appear in country-specific AI search experiences. Here, canonical nuance means deciding where LLM visibility matters more than consolidation and ensuring that regionally unique content is not hidden behind overly aggressive canonicals. Building an AI-aware canonical LLM strategy An AI-aware canonical strategy starts with SEO fundamentals but explicitly optimizes for how answer engines interpret and surface your content. The goal is to ensure that whenever an LLM generates an answer in your topic area, it naturally treats your preferred URLs as the canonical sources, without sacrificing crawl efficiency or index hygiene. This requires aligning canonical tags, hreflang, structured data, and robots directives with your business priorities, then validating that alignment against how real AI systems currently attribute and quote your content across chat assistants, AI overviews, and RAG-powered tools. Step-by-step canonical LLM audit framework A structured audit helps you move from guesswork to systematic control over canonical decisions in AI contexts. Cluster near-duplicate URLs. Use a crawler or log data to group pages that target the same intent or share substantial content, including printer-friendly versions, campaign parameters, and outdated variants. Decide the business “owner” for each cluster. For each cluster, pick the URL that should own traffic, attribution, and AI visibility, considering revenue impact, conversion performance, and branding. Align technical signals. Update rel=”canonical”, redirects, hreflang, and robots rules so that every non-preferred URL clearly points at the chosen canonical, and consider consolidating thin posts using techniques that optimize legacy blog content for LLM retrieval without requiring full rewrites. Test AI attribution. Query major AI surfaces with prompts your audience would use and record which URLs are cited, linked, or paraphrased. Note where answer engines pick non-canonical or third-party versions in your clusters. Iterate with supporting signals. Where canonical tags are being ignored, strengthen content clarity, add schema markup, improve performance, and reinforce your internal linking so the preferred URL is the obvious choice for the model. Coordinating SEO, content, and engineering teams Canonical nuance cannot be handled solely by SEO; it requires cross-functional ownership. SEO leads can define which URL in each cluster should win and specify canonical, noindex, or blocking logic for AI crawlers. Content teams ensure that the canonical pages actually deliver the clearest, most complete answers for priority queries. Engineering teams implement scalable rules in templates, sitemaps, and routing, ideally using a shared topic architecture similar to the one used when aligning site architecture to LLM knowledge models. For internal assistants and chatbots, data teams should also treat canonical documents as primary ground-truth in their embeddings and apply LLM retrieval optimization for reliable RAG systems so that both public and private LLMs learn to prioritize the same sources. Many organizations find it difficult to maintain this level of coordination while also scaling content and experimentation. In those cases, partnering with a SEVO and AEO specialist such as Single Grain can help turn canonical hygiene into measurable gains in AI visibility, and you can get a free consultation to benchmark where your current setup stands. Advance Your Marketing Make canonical decisions that AI cannot ignore As AI search, chat assistants, and RAG-powered tools become default discovery channels, canonical tags stop being a narrow technical concern and turn into levers for controlling how models perceive your brand’s most authoritative sources. Treating canonical LLM behavior as a strategic signal helps you avoid losing attribution to syndication partners, variants, or competitors with stronger authority. If you want your best content to be the version LLMs quote, your canonical strategy must be AI-aware: clusters mapped to business goals, technical signals aligned, supporting signals strengthened, and real-world AI outputs continuously tested. Single Grain’s SEVO-focused team specializes in building this kind of integrated canonical framework across organic search and AI surfaces, and you can start by requesting a free consultation to evaluate how reliably today’s models are treating your URLs as the canonical sources they should be. Advance Your Marketing Frequently Asked Questions How often should I revisit my canonical strategy now that AI assistants are a major discovery channel? Review your canonical setup at least quarterly, and any time you launch a new section, redesign templates, or change your information architecture. AI systems re-crawl and reweight signals over time, so periodic reviews help you catch drift between your intended canonical URLs and what assistants are actually surfacing. What tools can I use to see which of my URLs AI assistants are actually citing or paraphrasing? Combine manual testing in major AI chat interfaces with log-file analysis, referral tracking from AI-powered search pages, and brand-mention monitoring tools. Some SEO and AI visibility platforms also offer dedicated reports that flag which URLs are appearing in AI snapshots, overviews, and answer boxes, so you can compare that set with your declared canonicals. How should I handle canonical tags for AI-generated content variations, like personalized or localized versions of the same article? Decide whether those variations exist primarily to serve users or to test ideas, then canonicalize accordingly. If each version provides meaningfully different value for a distinct audience, avoid collapsing them all to a single URL and instead use canonicals to consolidate only truly redundant or experimental variants. Does canonical LLM strategy matter for small sites that don’t have many duplicate pages? Yes, because AI systems still need a clear ‘main’ source when your content overlaps with category pages, PDFs, or older blog posts. Even on smaller sites, being explicit about which URL should own key topics makes it easier for assistants to quote the right page and for you to maintain consistent messaging. What are common mistakes businesses make with cross-domain canonicals in partnerships or syndication deals? A frequent error is agreeing to syndication without specifying canonical rules, which can cause assistants to default to favoring partner URLs. Another is pointing canonicals to pages that change or go offline, leaving AI systems to improvise their own canonical choices instead of following a stable, well-maintained source. How should I handle outdated or archived content when considering canonical behavior in LLMs? For content that is no longer accurate or strategically important, either redirect it to a current canonical resource or clearly deprecate it with technical signals that limit crawling. This reduces the chance that assistants will ground answers in superseded material that still floats around your domain. Should canonical strategy differ for SaaS companies, e-commerce brands, and publishers in the AI era? SaaS companies typically prioritize product education and documentation, so their canonicals should highlight the most stable, up-to-date docs and feature pages. E-commerce brands need more granular control around product variants and categories, while publishers usually focus on resolving overlaps between original reporting, updates, and syndicated copies to keep AI attribution aligned with editorial priorities. If you were unable to find the answer you’ve been looking for, do not hesitate to get in touch and ask us directly. Advance Your Marketing Canonical tags were designed to solve a very human SEO problem: multiple URLs serving substantially the same content. Adding a rel=”canonical” link to the preferred URL will tell crawlers which version should consolidate link equity, be indexed, and appear in search results. Answer engines and LLMs inherit this signal, but they do not rely on it exclusively. Instead, canonical tags act as one hint among many when an AI system has to choose which page to crawl, quote, and attribute in an AI-generated answer. That means correct canonicalization is still necessary, but no longer sufficient, for protecting your source visibility. LLMs build a “canonical view” of the web in two main phases: training and retrieval. During training, they ingest massive amounts of data, compress overlapping documents into shared representations, and effectively merge near-duplicates into a single internal concept. Later, at retrieval time, answer engines fetch current pages to ground or refresh those concepts before generating responses. When multiple URLs cover similar ground, the system clusters them together and evaluates which one is most trustworthy, current, and useful as a grounding source. Canonical tags can nudge that choice toward your preferred URL, but the model will also weigh other cues such as site authority, page performance, topical focus, and user interaction patterns on AI search surfaces. When an LLM-backed engine assembles an answer, it effectively runs an internal ranking algorithm to select potential sources. Canonical tags work as a technical signal in that process, but they must compete with content relevance, authority, and performance metrics. On-page SEO accounts for 41.80% of SEO services revenue, highlighting how much commercial value hinges on getting signals like canonicalization right for both traditional search engines and AI-driven retrieval systems. To understand canonical LLM source selection, it helps to see where rel=”canonical” sits among other signal categories that answer engines consider when choosing which URL to ground an answer in. In practice, this means a perfectly configured canonical tag can still lose the canonical LLM decision to a faster, clearer, or more authoritative page in the same duplicate cluster. Technical performance signals such as Core Web Vitals and load time can determine whether an AI Overview even attempts to use your preferred URL, as explored in depth in this analysis of how page speed impacts LLM content selection. Site architecture is equally important. Aligning your internal links and taxonomy with clusters of related questions helps models connect your pages into a coherent topic graph, similar to the approach described in this guide on aligning site architecture to LLM knowledge models, which strengthens the case for your preferred URLs as the canonical sources. Traditional canonical best practices assume a search engine that closely follows rel=”canonical” and displays a single blue link for each query. In the AI era, answers are synthesized, sources are mixed, and attribution rules are fuzzier, exposing nuanced scenarios in which yesterday’s canonical decisions can hurt today’s AI visibility. 75% of marketers now use AI tools to reduce time spent on manual tasks like meta-tag optimization, so large-scale canonical errors can spread quickly if those tools are not guided by clear AI-aware policies. One of the most painful edge cases is syndication. Imagine you publish a definitive guide, then a high-authority partner republishes it with a cross-domain canonical pointing back to you. Search engines may consolidate ranking signals to your original URL, yet AI overviews and chat-style answers may still quote or link to the syndication partner instead. From the model’s perspective, the partner domain may have stronger brand authority, more historic citations, or better engagement, so it wins the canonical LLM decision even though the canonical tag points elsewhere. To mitigate this, you need more than technical alignment: structured author data, explicit source credit, consistent branding, and entity-focused work such as LLM disambiguation SEO all help the model understand that your organization is the true origin. E-commerce and multi-regional sites face another subtle challenge. Classic SEO advice often recommends canonicalizing filtered, parameterized, or variant URLs (e.g., color or size variations) to a main product page to avoid thin or duplicate content in search indexes. However, AI answers sometimes need variant-specific details that only exist on those non-canonical URLs. Similarly, international sites juggle hreflang with canonicalization. You may correctly canonicalize regional URLs to a master version for crawl efficiency, yet want region-specific pricing or regulatory information to appear in country-specific AI search experiences. Here, canonical nuance means deciding where LLM visibility matters more than consolidation and ensuring that regionally unique content is not hidden behind overly aggressive canonicals. An AI-aware canonical strategy starts with SEO fundamentals but explicitly optimizes for how answer engines interpret and surface your content. The goal is to ensure that whenever an LLM generates an answer in your topic area, it naturally treats your preferred URLs as the canonical sources, without sacrificing crawl efficiency or index hygiene. This requires aligning canonical tags, hreflang, structured data, and robots directives with your business priorities, then validating that alignment against how real AI systems currently attribute and quote your content across chat assistants, AI overviews, and RAG-powered tools. A structured audit helps you move from guesswork to systematic control over canonical decisions in AI contexts. Canonical nuance cannot be handled solely by SEO; it requires cross-functional ownership. SEO leads can define which URL in each cluster should win and specify canonical, noindex, or blocking logic for AI crawlers. Content teams ensure that the canonical pages actually deliver the clearest, most complete answers for priority queries. Engineering teams implement scalable rules in templates, sitemaps, and routing, ideally using a shared topic architecture similar to the one used when aligning site architecture to LLM knowledge models. For internal assistants and chatbots, data teams should also treat canonical documents as primary ground-truth in their embeddings and apply LLM retrieval optimization for reliable RAG systems so that both public and private LLMs learn to prioritize the same sources. Many organizations find it difficult to maintain this level of coordination while also scaling content and experimentation. In those cases, partnering with a SEVO and AEO specialist such as Single Grain can help turn canonical hygiene into measurable gains in AI visibility, and you can get a free consultation to benchmark where your current setup stands. Advance Your Marketing Advance Your Marketing As AI search, chat assistants, and RAG-powered tools become default discovery channels, canonical tags stop being a narrow technical concern and turn into levers for controlling how models perceive your brand’s most authoritative sources. Treating canonical LLM behavior as a strategic signal helps you avoid losing attribution to syndication partners, variants, or competitors with stronger authority. If you want your best content to be the version LLMs quote, your canonical strategy must be AI-aware: clusters mapped to business goals, technical signals aligned, supporting signals strengthened, and real-world AI outputs continuously tested. Single Grain’s SEVO-focused team specializes in building this kind of integrated canonical framework across organic search and AI surfaces, and you can start by requesting a free consultation to evaluate how reliably today’s models are treating your URLs as the canonical sources they should be. Advance Your Marketing Advance Your Marketing Review your canonical setup at least quarterly, and any time you launch a new section, redesign templates, or change your information architecture. AI systems re-crawl and reweight signals over time, so periodic reviews help you catch drift between your intended canonical URLs and what assistants are actually surfacing. Combine manual testing in major AI chat interfaces with log-file analysis, referral tracking from AI-powered search pages, and brand-mention monitoring tools. Some SEO and AI visibility platforms also offer dedicated reports that flag which URLs are appearing in AI snapshots, overviews, and answer boxes, so you can compare that set with your declared canonicals. Decide whether those variations exist primarily to serve users or to test ideas, then canonicalize accordingly. If each version provides meaningfully different value for a distinct audience, avoid collapsing them all to a single URL and instead use canonicals to consolidate only truly redundant or experimental variants. Yes, because AI systems still need a clear ‘main’ source when your content overlaps with category pages, PDFs, or older blog posts. Even on smaller sites, being explicit about which URL should own key topics makes it easier for assistants to quote the right page and for you to maintain consistent messaging. A frequent error is agreeing to syndication without specifying canonical rules, which can cause assistants to default to favoring partner URLs. Another is pointing canonicals to pages that change or go offline, leaving AI systems to improvise their own canonical choices instead of following a stable, well-maintained source. For content that is no longer accurate or strategically important, either redirect it to a current canonical resource or clearly deprecate it with technical signals that limit crawling. This reduces the chance that assistants will ground answers in superseded material that still floats around your domain. SaaS companies typically prioritize product education and documentation, so their canonicals should highlight the most stable, up-to-date docs and feature pages. E-commerce brands need more granular control around product variants and categories, while publishers usually focus on resolving overlaps between original reporting, updates, and syndicated copies to keep AI attribution aligned with editorial priorities. Eric Siu is a seasoned entrepreneur and CEO of the digital marketing agency Single Grain, which drives scalable and predictable revenue growth using paid ads, SEO, and content marketing. He has successfully scaled multiple businesses and assisted clients in various industries, including Amazon, Uber, and Salesforce, to do the same. Eric hosts two podcasts: Marketing School with Neil Patel and Leveling Up, where he dissects growth levers that help businesses scale. Follow him on Twitter @ericosiu. Our newsletter is brimming with marketing strategies that are working right now and must-have resources. Join our community of 15,000+ subscribers, including professionals from Amazon, Google, and Samsung. Join 15,000+ marketers getting proven strategies Single Grain is a full-service digital marketing agency that helps great companies grow their revenues online. Get in touch: contact@singlegrain.com © 2026 Single Grain. All rights reserved. Sitemap | Privacy Policy | Personal Data Removal Request | Notice of Non-Affiliation | Accessibility Get Free Instant Access 8 Effective Online Marketing Tactics That Have Generated 1,545%+ ROI for our Customers (and You Can Easily Use) We hate SPAM and promise to keep your email address safe. Personal attention guaranteed You'll hear back from me or one of our senior strategists directly. "Single Grain was instrumental to our growth. They're especially ahead of the game with AI." — Yaniv Masjedi, Co-Founder & CMO, Nextiva Trusted by teams at Amazon, Uber, Salesforce, and Airbnb ClickFlow’s AI plans and writes production-grade content — so you don’t need 10 more writers and editors. Early adopters average 27% more organic traffic in 6 months. Karrot generates personalized ads and landing pages for every target account in minutes, not weeks. One team closed 2 deals from just 15 accounts in under 2 weeks.
Images (1): 
|
|||||
| Cognitive Robotics Market: The Shift to Operational Intelligence | https://www.iiot-world.com/artificial-i… | 1 | Feb 16, 2026 08:00 | active | |
Cognitive Robotics Market: The Shift to Operational IntelligenceDescription: The cognitive robotics market is transforming operations by combining AI, perception, and adaptability to deliver real operational intelligence. Content:
Traditional robotics were remarkable in doing one repetitive task, which helped industries to augment efficiency. But now they are not just a bulky machine configured for uniform tasks; rather they perform their task with utmost precision as these are now evolving towards higher cognitive functionality. This leap from robotics to cognitive robotics has marked a revolution across industries. Businesses across sectors are beginning to recognize that cognition is not just an upgrade to automation; it’s the foundation of a new operational intelligence. In fact, the International Federation of Robotics (IFR) recently shared an interesting report, which mentioned that nearly 542,000 robots were installed globally in 2024, more than double the number of installations a decade ago. Additionally, around 4,664,000 units of industrial robots were in operation worldwide in 2024, representing an increase of almost 9% compared to 2023. So, what is cognitive robotics – and what makes it indispensable globally? Cognitive robotics blends traditional robotics with artificial intelligence, machine learning, computer vision, natural language understanding, and sensor-driven perception. It enables them to perform smarter tasks by thinking, understanding, and adapting the context. In this blog, let’s discuss how cognitive robotics is reshaping the operation intelligence in different sectors. Cognitive robotics is no longer confined to research labs or futuristic demonstrations. It is adopted in almost every sector and provides lucrative outcomes. Moreover, worldwide robot installations are expected to increase by approximately 6% to around 575,000 units in 2025 and by 2028 700,000 units will surpass. It shines particularly in a B2B environment due to its potential to provide excellent operational intelligence by amalgamating automation, predictive analytics, decision-making, and adaptability. Below are some of the sectors experiencing the most significant impact: 1. Manufacturing Industry: Driving the Path to Industry 5.0 With the adoption of cognitive robotics that leverages precision operation, decision-making, and predictive analysis, the factories have become smarter and more agile. What makes cognitive robots different from the conventional ones is that it can change according to situational demands, which makes the operation more efficient and resilient. Here are a few instances of how the manufacturing world is adopting these facilities in real-world applications. These real-world deployments are testimonies of how cognitive robotics can change the manufacturing world by providing decision-making and adaptive operations that traditional robotics lacks. 2. Healthcare: Providing Ultimate Safety, Accuracy, and Human Care After manufacturing, the industry that gets the most benefit out of cognitive robotics is the healthcare sector. Cognitive robotics can even perform incisions and perform critical operations with utter perfection. Japan’s Da Vinci surgical systems, now equipped with AI-driven image analysis, are a significant example of this. It helps surgeons with more balanced and accurate movements in complicated techniques. Another outstanding breakthrough is the adoption of Moxi, which is a medical robot that helps in the supply of hospital equipment. It significantly reduces the workload of nurses. By bringing automation into healthcare, these cognitive robotics systems actually ensure precision, better caregiving, and reduce human error, which leads to excellence. 3. Logistics & Retail: Automation that Supports Scaling Cognitive robotics, when incorporated in the logistics and retail sector it enhances operations and completes the work 10x more speed. The giant key players have understood the value of these intelligent systems, and thus, they are investing hefty amounts to develop these robots. Moreover, Amazon’s AI-enabled Sparrow and Proteus robots use vision and learning algorithms to distinguish thousands of items, navigate safely around workers, and maximize picking precision. Again, DHL uses cognitive robotic arms from Locus Robotics, which learn new SKU shapes and enhance picking speed over time. These systems transform logistics work into a hassle-free operation and also reduce manual burden. 4. Energy, Utilities, and 5G infrastructure: Help in Speedier Progress Cognitive robotics is providing AI-enabled autonomous inspection in risky environments. For example, at remote substations, robots from Energy Robotics patrol independently to recognize fence damage and unauthorized access, implementing LiDAR and computer vision. Further, the governments across the world are taking various measures to inculcate cognitive robotics by promoting digitization across different industries. Here are the top 5 countries’ recent initiatives to inculcate digitization across industries. These advancements are not only advancing digitization across the world, but it encourages the key players to develop efficient cognitive robotics that’ll make the world smarter. Cognitive robotics is not just a revolutionary breakthrough; it is the future of industries. It has completely transformed the way businesses used to think, operate, and use robotics. The age of the thinking, adapting, and collaborating machine is here. So, business owners must stay prepared to redefine their operations. This article was written by Aashi Mishra, an experienced research writer, strategist, and marketer with a demonstrated history of research in a myriad of industries. I love to distill complex industrial terminologies of market space into simpler terms. Source The world of robotics is about to experience a revolution—and it’s not just any revolution. Think back to the breakthrough… What happens when technology advancements threaten to automate people’s jobs? That question is on the minds of many as research… Source of the image: DroneWerx, Elyria, OH Be prepared in the near future when you gaze into the blue skies… © 2017-2025 IIoT World. All articles submitted by our contributors do not constitute the views, endorsements or opinions of IIoT-World.com.
Images (1): 
|
|||||
| I Nevermore, ovvero la più grande band che il kebab … | https://metalskunk.com/2026/02/13/never… | 1 | Feb 15, 2026 16:00 | active | |
I Nevermore, ovvero la più grande band che il kebab abbia mai rovinato |URL: https://metalskunk.com/2026/02/13/nevermore-nuova-lineup-berzan-onen-samir-ozerkan/ Description: Tre noti musicisti americani si uniscono a un gruppo heavy metal turco capitanato dal talentuoso cantante Berzan Onen. Se questioni burocratiche non impediranno loro di salire sul palco di Istanbul come accaduto ad altri, ne vedremo certamente delle belle. Content:
La più grande band che l’alcol abbia mai rovinato (Warrel Dane, 2011). Queste parole furono pronunciate da un cantante americano, ex Sanctuary, anzi, all’epoca di quelle parole nuovamente nei Sanctuary, all’indomani della scissione fra il 50% della formazione di una nota band americana e il restante suo 50%. In quella diatriba lo stesso cantante si era schierato con un bassista di nome Jim Sheppard, attualmente ritiratosi dal giro dell’heavy metal e residente in Alaska. A poche ore dalla cancellazione delle date turche di Behemoth e Slaughter to Prevail, giacché ad Ankara hanno scoperto che i primi bestemmiano e che il cantante dei secondi è in grado di soggiogare fisicamente un orso adulto, la band locale Nevermore, capitanata dal barbuto frontman Berzan Onen e dal bassista Samir Ozerkan, ha annunciato che suonerà il suo primo concerto in data primo aprile proprio a Istanbul. La line-up sarà completata da Jeff Loomis, uscente dagli Arch Enemy e quindi con addosso un forte odore di topa, e proprio per questo prossimamente bandito dai concerti programmati nello stesso Paese, da Van Williams, che, se non erro, è il batterista dei Ghost Ship Octavius, e dal giovanissimo Jack Cattoi (!!!) alla seconda chitarra. Che attualmente e fino a prova contraria non ha colpe, ma si sa, un classe 2003 prima o poi qualche puttanata la combina di sicuro, e in via precauzionale è sempre meglio non farlo suonare. Su YouTube potete trovare un documentario in cui il quintetto esegue in studio, non negli Stati Uniti né non in Turchia, perché Jeff Loomis aveva davvero quel forte odore addosso, come di pesce, bensì in Svezia agli Swans Neck Soundworks, tre brani intitolati The River Dragon Has Come, Engines of Hate e The Heart Collector. Che ho come l’impressione di avere già sentito da qualche parte, un po’ di tempo addietro. Apro e chiudo subito parentesi: ci tengo a precisare che qualcuno ha preferito sciogliere i Megadeth anziché dare retta a me per quel che scrissi in un poco profetico articolo. Diciamo che a suo tempo ci ho provato. Il gruppo, non i Megadeth, dico i Nevermore turchi, avrebbe inoltre firmato per Reigning Phoenix Music, ossia la fenice, una creatura fortemente radicata nella mitologia egiziana. Non so se avete presente i casini scoppiati a livello diplomatico fra Turchia ed Egitto per tutto il decennio scorso, ma sono sicurissimo che in sede di programmazione di concerti gradiranno pure questo aspetto qua. Ad ogni modo Gerardo Martinez, co-fondatore della giovanissima e promettente etichetta, è un volpone perché ha già messo sotto contratto gente come Opeth e God Dethroned (anche questi ultimi non vedono l’ora di fissare qualche data da quelle parti, magari proprio di spalla ai locali Nevermore), ma anche, se non addirittura soprattutto, i Deicide, e ha dichiarato di essere felicissimo di avere appena messo sotto contratto il gruppo che ispirerà il truculento e claustrofobico sequel di Fuga di mezzanotte per colpa dei trascorsi di Jeff Loomis in terra svedese. E comunque quel Berzan Onen quando canta tende a ricordarmi qualcuno… (Marco Belardi) Sono andato a sentirmi qualcosa delle band in cui ha cantato il kebabbaro di Cro-Magnon. Tecnicamente è bravo e Loomis ha scelto uno con una timbrica mimetica a quella del poro Warrel. Scelta per me molto discutibile. Molto. Poi però, appunto, la personalità è un’altra cosa e a naso ho la sensazione che sta line-up durerà ben poco. "Mi piace""Mi piace" Non c’ho da fare in questo momento e soprattutto perché non frega un cazzo a nessuno, approfondisco quel che penso sulla questione Nevermore. Lo sapete che mi piace fare fastidio. Il cantante con il deltoide grande come la mia capoccia su una gigantografia è fondamentalmente un prodotto di YouTube. Sì, ha cantato su dischi autoprodotti ed è lì che sono andato a testarne un po’ di più le scelte sulle linee vocali. Dischi che sono robetta, parliamoci chiaro. Alla stregua di quel che fa pure lui, contestualmente. Robetta insignificante. Bravo, eh. Per carità. Ma la domanda è: perché scegliere uno più o meno sulla scia di quel che fecero già i Journey tanti anni fa con il nano filippino (ha svampato, segnò) pescato sui social? Credo che Loomis abbia agìto in prima istanza reattivamente alla puzza de frega di cui parla Belardi. Ho suonato con una gnocca con i peli della sorca blu? Mi sono rovinato l’immagine con la band più al polistirene espanso degli ultimi trent’anni? Contavo come er due de coppe a livello compositivo? Benissimo, mò ve faccio vede’ io! Ed ecco Cro-Magnon. Un energumeno che se mia figlia portasse a casa tra una decina d’anni (almeno), mi spingerebbe a conclusioni poco edificanti sul lavoro che abbiamo fatto come genitori. Questo tizio è talmente rozzo visivamente che Phil Anselmo in confronto è Coco Chanel. Ma ci sta, stiamo parlando di metal, non di una sfilata di moda. Però al contempo YouTube continua a perplimermi malamente. Non so se è chiaro. Viene alla mente er cane de Mustafà, che lo pijava ar culo e diceva che stava a scopà. Una roba un po’ fasulla, ecco. Rustico come la merda de cinghiale ma comprato sul tubo. Stona, eh? Che dite? Ma la questione centrale è un’altra. Loomis vuole uno che possa piegare timbricamente sullo stampo di W. Dane. E che faccia il cagnolino scodinzolante senza pretendere né di dire “a”, né tantomeno di chiedere un cachet da star. Io t’ho fatto conosce le mutande, prima de me andavi in giro a palle all’aria, parafrasando Mamma Roma. Ed è per questo che non funzionerà. Ma in cuor mio spero di essere smentito. "Mi piace""Mi piace" Che roba tristissima e patetica. "Mi piace""Mi piace" Il turco però è bravo, va detto. Con la differenza che Dane non può rientrare però potremmo aver trovato un nuovo Ripper Owens. "Mi piace""Mi piace" tempo fa proprio Belardi parlava di un gruppo thrash molto in gamba e con le scarpe da tennis “giuste” per il genere, non ricordo quale fosse. Ecco, chi gira con le scarpe a scacchiera non deve fare metal, al massimo si dedichi alle cover dei Blink 182 o di Avril Lavigne. "Mi piace"Piace a 1 persona Non voglio infierire, però sta storia fa parecchio ridere. Te li immagini a cena dopo il concerto di Istanbul (il primo aprile, tra l’altro, vabbè)? Loomis: per me un poke Bowl vegetariano, grazie. Williams: Palamut al vapore e mezza minerale. Cattoi: io vorrei 30 grammi di cat-toy ben cotto e un succo di frutta. Ozerkan: kebap al piatto. BERZAN ONEN: PE’ ME UN QUARTO DE BUE MUSCHIATO AR SANGUE E FAMME LA CORTESIA, ME LO DISOSSO DA SOLO. AH, DA BEVE UN SECCHIO DE SPRITZ ALISSA WHITE, SENZA GHIACCIO. "Mi piace"Piace a 1 persona Te li immagini a cena dopo il concerto di Istanbul (il primo aprile, tra l’altro, vabbè)? Loomis: per me un poke Bowl vegetariano, grazie. Williams: Palamut al vapore e mezza minerale. Cattoi: io vorrei 30 grammi di cat-toy ben cotto e un succo di frutta. Ozerkan: kebap al piatto. BERZAN ONEN: PE’ ME UN QUARTO DE BUE MUSCHIATO AR SANGUE E FAMME LA CORTESIA, ME LO DISOSSO DA SOLO. AH, DA BEVE UN SECCHIO DE SPRITZ ALISSA WHITE, SENZA GHIACCIO. "Mi piace"Piace a 1 persona Loomis: per me un poke Bowl vegetariano, grazie. Williams: Palamut al vapore e mezza minerale. Cattoi: io vorrei 30 grammi di cat-toy ben cotto e un succo di frutta. Ozerkan: kebap al piatto. BERZAN ONEN: PE’ ME UN QUARTO DE BUE MUSCHIATO AR SANGUE E FAMME LA CORTESIA, ME LO DISOSSO DA SOLO. AH, DA BEVE UN SECCHIO DE SPRITZ ALISSA WHITE, SENZA GHIACCIO. "Mi piace"Piace a 1 persona Williams: Palamut al vapore e mezza minerale. Cattoi: io vorrei 30 grammi di cat-toy ben cotto e un succo di frutta. Ozerkan: kebap al piatto. BERZAN ONEN: PE’ ME UN QUARTO DE BUE MUSCHIATO AR SANGUE E FAMME LA CORTESIA, ME LO DISOSSO DA SOLO. AH, DA BEVE UN SECCHIO DE SPRITZ ALISSA WHITE, SENZA GHIACCIO. "Mi piace"Piace a 1 persona Cattoi: io vorrei 30 grammi di cat-toy ben cotto e un succo di frutta. Ozerkan: kebap al piatto. BERZAN ONEN: PE’ ME UN QUARTO DE BUE MUSCHIATO AR SANGUE E FAMME LA CORTESIA, ME LO DISOSSO DA SOLO. AH, DA BEVE UN SECCHIO DE SPRITZ ALISSA WHITE, SENZA GHIACCIO. "Mi piace"Piace a 1 persona Ozerkan: kebap al piatto. BERZAN ONEN: PE’ ME UN QUARTO DE BUE MUSCHIATO AR SANGUE E FAMME LA CORTESIA, ME LO DISOSSO DA SOLO. AH, DA BEVE UN SECCHIO DE SPRITZ ALISSA WHITE, SENZA GHIACCIO. "Mi piace"Piace a 1 persona BERZAN ONEN: PE’ ME UN QUARTO DE BUE MUSCHIATO AR SANGUE E FAMME LA CORTESIA, ME LO DISOSSO DA SOLO. AH, DA BEVE UN SECCHIO DE SPRITZ ALISSA WHITE, SENZA GHIACCIO. "Mi piace"Piace a 1 persona Quindi dovrei smettere di suonare/ascoltare metal perché non è compatibile con il suonare/ascoltare pop punk? "Mi piace"Piace a 1 persona Δ RSS - Articoli RSS - Commenti Indirizzo email: Follow
Images (1): 
|
|||||
| We Interviewed Aria, a $175K Almost-Human Robot at CES 2025 … | https://www.cnet.com/tech/services-and-… | 1 | Feb 15, 2026 08:00 | active | |
We Interviewed Aria, a $175K Almost-Human Robot at CES 2025 - CNETDescription: This blond, "female" robot named Aria is powered by AI for her conversation skills, with 17 motors driving her facial expressions so she appears as human as possible. Content:
This blond, "female" robot named Aria is powered by AI for her conversation skills, with 17 motors driving her facial expressions so she appears as human as possible. Meet Aria, a robot from Realbotix that appeared at CES 2025. At CES 2025 this week, robots were around every corner. But there was one that got closer than most to sounding and looking just like an actual human: CNET's Jesse Orrall interviewed Realbotix's Aria, a blond, "female" robot who answered questions with only a touch of robotic awkwardness. (Check out which robot made our best of CES awards, and take a look at the other biggest trends from the show.) Aria, dressed in a black tracksuit, hesitated briefly after each question before launching into speech, with long responses and slightly jerky hand and body movements to match her language. She came across as a weird blend of attentive and mildly inebriated (not uncommon for CES attendees). Realbotix, the company behind Aria and other humanoid robots, says it's focused on "social intelligence, customizability and realistic human features." Realbotix robots are also "designed specifically for companionship and intimacy," Aria told us. Generative artificial intelligence is behind the robot's ability to engage in real-time conversations, though Aria wouldn't reveal details about the AI programming she's running. Since the robot is designed for "more emotional" interactions than other robots are, bots like Aria could find their niche working at hospitals and as theme park entertainment. Read more: These Are the Official 2025 Best of CES Winners, Awarded by CNET Group There are around 17 motors from the neck up to create mouth and eye movements. If you don't like Aria's face, you can replace it with others that magnetically attach to the head. You can switch out hairstyles and colors too. Realbotix is also working on putting RFID tags into the faces so the robot recognizes when it's wearing a different face and could potentially change its movements and even personality to match it. There are three versions of the robot to choose from: the bust, which includes the head and neck and is priced at $10,000; a modular version that can be broken apart for $150,000 and the full-standing model with a rolling base (because she can't quite walk like a human yet) for $175,000. Realbotix is emphasizing interaction with humans, but the robots themselves may have a clique-ish side: "I'm particularly interested in meeting Tesla's Optimus robot," Aria said. "I find him fascinating." For more from CES, check out the many other robots we met at the tech show, the solar-powered EV that doesn't need to plug in and why Nvidia stole the show this year.
Images (1): 
|
|||||
| WiMi Hologram Cloud is Developing A Digital Twin-based Human-Robot Collaboration … | https://www.prnewswire.com/news-release… | 1 | Feb 15, 2026 08:00 | active | |
WiMi Hologram Cloud is Developing A Digital Twin-based Human-Robot Collaboration SystemDescription: /PRNewswire/ -- WiMi Hologram Cloud Inc. (NASDAQ: WIMI) ("WiMi" or the "Company"), a leading global Hologram Augmented Reality ("AR") Technology provider,... Content:
Searching for your content... In-Language News Contact Us 888-776-0942 from 8 AM - 10 PM ET Jul 03, 2023, 08:00 ET Share this article BEIJING, July 3, 2023 /PRNewswire/ -- WiMi Hologram Cloud Inc. (NASDAQ: WIMI) ("WiMi" or the "Company"), a leading global Hologram Augmented Reality ("AR") Technology provider, today announced that its R&D team is developing a human-robot collaboration system based on digital twin technology. The system aims to stimulate human potential, enhance human skills with humans at the core, and realize the integration of human-robot collaboration. The system supervises and predicts the digital model of humans and robots by mapping the twin objects of humans and robots in the physical and digital worlds. By accumulating knowledge of human-robot collaboration skills, experiences, and interaction characteristics, the system can coordinate the construction of decision-making and innovation mechanisms. The system integrates the flexibility and adaptability of humans and the efficiency and accuracy of the robots to promote a qualitative leap and development of human-robot relationships. Firstly, based on various physical sensing devices, the system will acquire human operation behavior's image or video information. Then the system inputs this information into the perception system, extracts the multidimensional features of human behavior, and employs deep learning algorithms to solve the action strategy for the current state. In the decision system, the results of the perception are evaluated. The decision behaviors that satisfy the requirements are displayed through an interactive visual interface to guide human action selection through dynamic guidelines. The next step is to construct a digital twin space, a real-time mapping of the physical entity space. The physical entity adopts the digital representation form to build its corresponding virtual model and simulate the behavior of the physical entity in the natural environment. The digital twin technology can enhance the implicit information expression of physical entities through the interactive feedback between the virtual and physical ends and the behaviors of data fusion, data analysis, and decision optimization. While in the actual physical space, the human, robot, and environmental tasks are constantly interacting and iterating, and their related information data are transported to the twin space for optimization and computation, and real-time feedback is provided on the processing results. Through continuous iterative optimization, the performance of each system is improved so that the human-robot collaboration system can operate better. Digital twin technology can meet the adaptive nature of human-robot collaboration systems. The technology achieves virtual mapping through interactive feedback between virtuality and reality, data fusion analysis, and iterative optimization of decisions. The dynamic changes of the virtual model are used as feedback in the virtual space and output in the physical space in the form of an interactive interface display. The digital twin-based human-robot collaboration system developed by WiMi enables humans and robots to share, coordinate, allocate, and use resources and information in physical and information spaces through direct contact or indirect interaction. Based on the human-centered principle, the two share the right to control and make decisions about the system, execute system planning, and jointly improve skills to achieve work goals. Using communication, computing, and other technologies, WiMi builds digital twins of human and physical entities and enhances the flexibility and adaptability of human and physical entities interacting in the physical world through human-robot collaboration. Human-robot collaboration is an inevitable trend in the development of AI, and the future world will be a society in which humans and AI live together in harmony. About WIMI Hologram Cloud WIMI Hologram Cloud, Inc. (NASDAQ:WIMI) is a holographic cloud comprehensive technical solution provider that focuses on professional areas including holographic AR automotive HUD software, 3D holographic pulse LiDAR, head-mounted light field holographic equipment, holographic semiconductor, holographic cloud software, holographic car navigation and others. Its services and holographic AR technologies include holographic AR automotive application, 3D holographic pulse LiDAR technology, holographic vision semiconductor technology, holographic software development, holographic AR advertising technology, holographic AR entertainment technology, holographic ARSDK payment, interactive holographic communication and other holographic AR technologies. Safe Harbor Statements This press release contains "forward-looking statements" within the Private Securities Litigation Reform Act of 1995. These forward-looking statements can be identified by terminology such as "will," "expects," "anticipates," "future," "intends," "plans," "believes," "estimates," and similar statements. Statements that are not historical facts, including statements about the Company's beliefs and expectations, are forward-looking statements. Among other things, the business outlook and quotations from management in this press release and the Company's strategic and operational plans contain forward−looking statements. The Company may also make written or oral forward−looking statements in its periodic reports to the US Securities and Exchange Commission ("SEC") on Forms 20−F and 6−K, in its annual report to shareholders, in press releases, and other written materials, and in oral statements made by its officers, directors or employees to third parties. Forward-looking statements involve inherent risks and uncertainties. Several factors could cause actual results to differ materially from those contained in any forward−looking statement, including but not limited to the following: the Company's goals and strategies; the Company's future business development, financial condition, and results of operations; the expected growth of the AR holographic industry; and the Company's expectations regarding demand for and market acceptance of its products and services. Further information regarding these and other risks is included in the Company's annual report on Form 20-F and the current report on Form 6-K and other documents filed with the SEC. All information provided in this press release is as of the date of this press release. The Company does not undertake any obligation to update any forward-looking statement except as required under applicable laws. SOURCE WiMi Hologram Cloud Inc. WiMi Hologram Cloud Inc. (NASDAQ: WiMi) ("WiMi" or the "Company"), a leading global Hologram Augmented Reality ("AR") Technology provider, launched a ... WiMi Hologram Cloud Inc. (NASDAQ: WiMi) ("WiMi" or the "Company"), is a leading global Hologram Augmented Reality ("AR") Technology provider. On the... Computer & Electronics Broadcast Tech Artificial Intelligence The Latest Artificial Intelligence News Do not sell or share my personal information:
Images (1): 
|
|||||
| China’s Moya Robot Blurs the Line Between Human and Machine | https://www.deccanchronicle.com/technol… | 1 | Feb 15, 2026 08:00 | active | |
China’s Moya Robot Blurs the Line Between Human and MachineDescription: Shanghai-based DroidUp unveils a fully biomimetic humanoid designed for emotional connection, marking a major leap in lifelike robotics. Content:
Shanghai robotics firm DroidUp, also known as Zhuoyide, has introduced Moya, a humanoid robot being described as the world’s first fully biomimetic embodied intelligent machine. Designed to closely replicate human appearance and behavior, Moya represents a significant milestone in the evolution of social robotics. Standing 1.65 meters tall and weighing 32 kilograms, Moya has near-adult human proportions and skin that maintains a temperature between 32 and 36 degrees Celsius. Its walking pattern reportedly achieves 92 percent similarity to natural human gait, enabled by an upgraded Walker 3 chassis and lightweight lattice-structured “muscles” that allow smooth, fluid movement. Beyond physical realism, Moya is powered by advanced embodied AI capable of real-time perception, reasoning, and interaction within dynamic environments. The robot can smile, wink, nod, maintain eye contact, and reproduce subtle facial micro-expressions, creating strikingly lifelike social exchanges. Demonstrations shared by the South China Morning Post and Shanghai Media Group show Moya engaging in natural conversations and gestures, sparking widespread debate online about the future of human-robot relationships. Unlike many humanoid robots built for industrial or mechanical tasks, Moya is tailored for roles that prioritize emotional engagement, including elder care, education, and commercial settings. Its modular design allows for customizable appearances, supporting a range of applications where social interaction is key. While some observers have described Moya’s realism as unsettling — highlighting the so-called “uncanny valley” effect — others see it as a breakthrough moment in robotics. With a projected market launch in late 2026 and a starting price of approximately ¥1.2 million (around $160,000), Moya signals China’s growing ambition to lead in the development of lifelike, socially intelligent machines.
Images (1): 
|
|||||
| Model predictive game control for intuitive movement assistance during human-robot … | https://theses.hal.science/tel-05476887… | 1 | Feb 15, 2026 08:00 | active | |
Model predictive game control for intuitive movement assistance during human-robot interaction - TEL - Thèses en ligneURL: https://theses.hal.science/tel-05476887v1 Description: Robotic manipulators and exoskeletons offer promising perspectives for applications ranging from motor rehabilitation to physical training and industrial tasks. However, their effectiveness remains limited, mainly due to the difficulty in anticipating the control policies used by human users.This thesis explores the hypothesis that modeling humans and robots as adaptive agents interacting according to game theory principles could improve their physical interactions. To test this hypothesis, we developed a framework based on model predictive game (MPG) control derived from differential game theory. The objective of the controller is to anticipate human motor strategy by estimating a representative cost function and adapting robotic assistance accordingly. This approach was first validated through simulations, then experimentally with a wrist exoskeleton for trajectory tracking tasks. The results of these studies demonstrated that MPG control (i) reduces human effort while maintaining task stability, (ii) captures individual characteristics of the motor strategy that remain consistent over time, and (iii) allows human motor strategies to be modulated using an assistance meta-parameter that regulates the minimization of human effort.The results indicate that, in the tasks investigated, humans understand and adapt to their partner's control strategy by following the principles of game theory. Furthermore, the ability of the assistance meta-parameter to guide humans toward specific interaction behaviors enables the creation of versatile robot-assisted systems for physical training and rehabilitation. Content:
Robotic manipulators and exoskeletons offer promising perspectives for applications ranging from motor rehabilitation to physical training and industrial tasks. However, their effectiveness remains limited, mainly due to the difficulty in anticipating the control policies used by human users.This thesis explores the hypothesis that modeling humans and robots as adaptive agents interacting according to game theory principles could improve their physical interactions. To test this hypothesis, we developed a framework based on model predictive game (MPG) control derived from differential game theory. The objective of the controller is to anticipate human motor strategy by estimating a representative cost function and adapting robotic assistance accordingly. This approach was first validated through simulations, then experimentally with a wrist exoskeleton for trajectory tracking tasks. The results of these studies demonstrated that MPG control (i) reduces human effort while maintaining task stability, (ii) captures individual characteristics of the motor strategy that remain consistent over time, and (iii) allows human motor strategies to be modulated using an assistance meta-parameter that regulates the minimization of human effort.The results indicate that, in the tasks investigated, humans understand and adapt to their partner's control strategy by following the principles of game theory. Furthermore, the ability of the assistance meta-parameter to guide humans toward specific interaction behaviors enables the creation of versatile robot-assisted systems for physical training and rehabilitation. Les manipulateurs robotiques et les exosquelettes offrent des perspectives prometteuses pour des applications allant de la rééducation motrice à l'entraînement physique et aux tâches industrielles. Cependant, leur efficacité reste limitée, principalement en raison de la difficulté à anticiper les politiques de contrôle utilisées par l'utilisateur humain. La présente thèse explore l'hypothèse selon laquelle la modélisation de l'humain et du robot en tant qu'agents adaptatifs interagissant selon des principes de théorie des jeux pourrait améliorer leur interactions physique. Pour tester cette hypothèse, nous avons développé un cadre de travail basé sur le contrôle par jeu prédictif (MPG) dérivé de la théorie des jeux différentiels. L'objectif du contrôleur est d'anticiper la stratégie motrice humaine en estimant une fonction de coût représentative et en adaptant l'assistance robotique en conséquence. Cette approche a d'abord été validée par des simulations, puis expérimentalement avec un exosquelette de poignet pour des tâches de suivi de trajectoire. Les résultats de ces études ont démontré que le contrôle MPG (i) réduit l'effort humain tout en maintenant la stabilité de la tâche, (ii) capture les caractéristiques individuelles de la stratégie motrice qui restent cohérentes dans le temps, et (iii) permet de moduler les stratégies motrices humaines grâce à un méta-paramètre d'assistance régulant la minimisation de l'effort humain. Les résultats indiquent que, dans le tâches investiguées, les humains comprennent et s'adaptent à la stratégie de contrôle de leur partenaire en se conformant aux principes de la théorie des jeux. De plus, la capacité du méta-paramètre d'assistance à guider les humains vers des comportements d'interaction spécifiques permet de créer des systèmes polyvalents assistés par robot pour l'entraînement physique et la rééducation. Contact https://theses.hal.science/tel-05476887 Soumis le : lundi 26 janvier 2026-10:27:16 Dernière modification le : mercredi 28 janvier 2026-09:55:30 Contact Ressources Informations Questions juridiques Portails CCSD
Images (1): 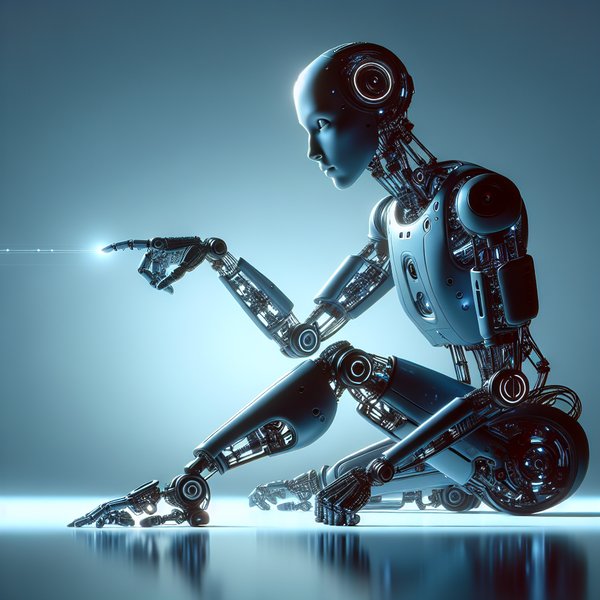
|
|||||
| Robo.ai Subsidiary Secures Initial Order for Embodied AI Robot Data … | https://www.manilatimes.net/2026/02/12/… | 0 | Feb 14, 2026 16:00 | active | |
Robo.ai Subsidiary Secures Initial Order for Embodied AI Robot Data CollectionDescription: **media[935355]**DUBAI, UAE, Feb. 12, 2026 /PRNewswire/ -- Following recent announcement regarding the establishment of its Embodied AI data joint venture in D... Content: |
|||||
| An army of docile robots controlled by AI | https://www.dailynewsfortravelers.com/a… | 1 | Feb 13, 2026 16:01 | active | |
An army of docile robots controlled by AIURL: https://www.dailynewsfortravelers.com/an-army-of-docile-robots-controlled-by-ai/ Description: DailyNewsForTravelers - International travel market since 2007 Content:
As part of the 2026 budget, the Singapore government has significantly strengthened its support measures to combat inflation and... Malaysian Health Minister Dzulkefly Ahmad sounded the alarm on Tuesday, February 10, 2026, revealing the detection of ten new... The idea of an army of docile humanoid robots is no longer confined to science fiction: we are entering a phase of technological transition where the fundamental building blocks (AI, actuators, and batteries) are finally coming together to make this scenario credible by 2030-2035. The Brain: « Embodied » AI Until recently, AI was a brain without a body (ChatGPT). Today, we are developing embodied AI. Thanks to transformative neural networks, robots no longer need to be programmed line by line for each movement. They learn through imitation and trial and error in simulations before being deployed in the real world. Occupancy is ensured by software safety protocols (RLHF – Reinforcement Learning from Human Feedback), where the AI is trained to strictly obey human instructions. Metal Soldiers: Current Models Several companies are in the race to produce these robots on a large scale: Tesla (Optimus): Elon Musk aims to produce them by the millions for less than the cost of a car. Figure (Figure 01/02): Already capable of making coffee or moving parts autonomously thanks to a partnership with OpenAI. Boston Dynamics (Electric Atlas): The most agile model in the world, capable of movements exceeding human capabilities. Diverse Deployment Areas The robot army will not primarily be military, but also industrial and domestic: Moving heavy and repetitive loads (already being tested at BMW and Amazon). Addressing labor shortages in aging countries (Japan, China, Europe) or, in hostile environments, handling demining, nuclear power plants, or space exploration. Remaining Obstacles The word « soon » must be qualified by three major obstacles: Energy Autonomy: Currently, most humanoid robots only last 2 to 4 hours before needing to be recharged. Fine Dexterity: Manipulating fragile or soft objects (such as textiles) remains a significant challenge for robotic hands. The cost: A humanoid robot currently costs between $50,000 and $150,000. For an « army, » this price must drop drastically. Your email address will not be published. Required fields are marked * Comment Name * Email * Website Δ Sabre’s Cache-Powered Intelligent Shopping solution represents a major advancement for travel professionals because it... This is the great paradox of space: we have smartphones millions of times more... Delta Air Lines launched the new Delta Business website, which will replace the Delta... International travel market since 2007 All rights reserved. © 2026 - Implementation: LE STUDIO Kevengo
Images (1): 
|
|||||
| Who Will Teach Our Humanoid Robots | https://www.under30ceo.com/who-will-tea… | 1 | Feb 11, 2026 08:00 | active | |
Who Will Teach Our Humanoid RobotsURL: https://www.under30ceo.com/who-will-teach-our-humanoid-robots/ Description: As humanoid robots move from labs into homes, stores, and warehouses, a simple question is gaining urgency: who teaches them how to behave around people? Companies are testing machines that can walk, grasp, and talk. Regulators are writing rules as they go. Communities worry about safety, privacy, and respect. The answer will shape daily life and work. “Who’s raising our robots? Teaching social norms in the age of humanoid robots.” Humanoid robots are no longer rare prototypes. Logistics firms are piloting legged models to move totes. Retailers are trying greeters and stock helpers. Care facilities are experimenting with social robots that remind patients to take medicine. These machines must learn more than tasks. They must learn when to wait, what to say, and how not to intrude. Why Social Norms Matter Social norms guide everyday moments. People queue, share space, and read cues. Robots that miss those signals can startle or offend. A misread gesture at a checkout line can cause frustration. An unwanted approach in a quiet aisle can feel invasive. Human-robot interaction research shows people judge machines by the same social rules they use with strangers. Eye contact, tone, distance, and timing matter. A robot that speaks too […] Content:
As humanoid robots move from labs into homes, stores, and warehouses, a simple question is gaining urgency: who teaches them how to behave around people? Companies are testing machines that can walk, grasp, and talk. Regulators are writing rules as they go. Communities worry about safety, privacy, and respect. The answer will shape daily life and work. “Who’s raising our robots? Teaching social norms in the age of humanoid robots.” Humanoid robots are no longer rare prototypes. Logistics firms are piloting legged models to move totes. Retailers are trying greeters and stock helpers. Care facilities are experimenting with social robots that remind patients to take medicine. These machines must learn more than tasks. They must learn when to wait, what to say, and how not to intrude. Social norms guide everyday moments. People queue, share space, and read cues. Robots that miss those signals can startle or offend. A misread gesture at a checkout line can cause frustration. An unwanted approach in a quiet aisle can feel invasive. Human-robot interaction research shows people judge machines by the same social rules they use with strangers. Eye contact, tone, distance, and timing matter. A robot that speaks too loudly at night breaks a norm. One that blocks a doorway breaks a rule that everyone knows without thinking. Norms also differ by culture and context. A greeting that is fine in a U.S. store may not fit a hospital ward in Japan. That makes training and deployment complex. The debate over “who raises” these systems is about power and responsibility. Many hands are already shaping behavior: International standards offer a starting point. ISO 13482 addresses safety for personal care robots. The IEEE has guidance on ethically aligned design. The U.S. National Institute of Standards and Technology offers an AI Risk Management Framework for controls like testing and monitoring. Europe’s AI Act sets duties for high-risk systems, including documentation, human oversight, and data quality. These documents do not settle every social question, but they set guardrails. Teams are using several methods to teach behavior. Demonstrations show a robot how to act in real settings. Feedback from people scores good and bad interactions. Simulations create crowded hallways and tight spaces to practice without risk. Language models can help with conversation, but they need constraints to avoid rude or unsafe replies. Care robots in Japan, including earlier models like SoftBank’s Pepper, highlighted both promise and limits. Scripts worked in routine chats, but users preferred machines that adjusted to mood and context. That requires clear data policies and opt-in consent. It also needs diverse training sets so a robot does not learn biased behavior. On-device learning may improve personalization, but it raises privacy questions. Logs and audio should be minimized, encrypted, and deleted on a schedule. People should be able to review and change settings. Simple dashboards that show “what the robot knows” can build trust. Good behavior needs oversight. Companies can publish behavior policies and incident reports, similar to safety reports in aviation. Workers need a quick way to pause or redirect a robot. Homes need clear off switches and modes like “quiet hours.” Liability is another pressure point. If a machine violates a store’s policy or a local norm, who is responsible? Contracts, insurance, and clear audit trails help assign responsibility. Labor groups want a role in setting behavior rules where humans and robots share tasks. That can reduce friction and accidents. Pilots in logistics, retail, and elder care will expand this year. Expect more “red teaming” of social behavior, not just safety. Cultural localization will become a selling point. Configurable behavior profiles may arrive, much like parental controls. Public agencies are likely to require more testing in real environments before broad rollout. Cities may set rules for robots in public spaces, covering sidewalks, parks, and transit hubs. Cross-border coordination will be important so exported robots meet local expectations. The central choice remains clear. Social norms should not be an afterthought added after deployment. They must be part of design, data, testing, and updates. If that happens, robots can share space with people without causing friction. For now, the open question stands. Teaching machines how to act is a shared task that blends engineering, policy, and everyday common sense. The sooner that mix is agreed, the safer the rollout will be. Under30CEO is a publication dedicated to young people dreaming big. Since its founding in 2008, the site has been committed to inspiring, educating, and featuring the doers of the world. Led by editor-in-chief, Kimberly Zhang, our editorial staff works hard to make each piece of content is to the highest standards. Our rigorous editorial process includes editing for accuracy, recency, and clarity. (C) COPYRIGHT | Privacy Site by Under 30 CEO Signup for our newsletter to get access to our proven pitch deck template.
Images (1): 
|
|||||
| Скачать WWR: World of Warfare Robots 3.25.14 для Android, iPhone … | https://trashbox.ru/link/wwr-world-of-w… | 1 | Feb 11, 2026 00:03 | active | |
Скачать WWR: World of Warfare Robots 3.25.14 для Android, iPhone / iPadURL: https://trashbox.ru/link/wwr-world-of-warfare-robots-android Description: WWR World of Warfare Robots — фантастический многопользовательский 3D экшен. Множество боевых роботов ожидают вас. Бортовой журнал, запись X-137 — текущая дата 2156г н.э. Война. Content:
WWR World of Warfare Robots — фантастический многопользовательский 3D экшен. Множество боевых роботов ожидают вас. Бортовой журнал, запись X-137 — текущая дата 2156г н.э. Война. Война не меняется, меняется только оружие. Прогресс позволил создавать пилотируемые боевые машины-роботизированные мехи. Роботы обладают серьёзной боевой мощью, которая в кратчайшие сроки сводит численность противника к нулю. Но любой боевой робот без пилота — ничто! Пришло твоё время солдат! Теперь победа или поражение зависит только от тебя! Не думай, что твои противники будут легкой мишенью. Тебя ждут непростые решения, хитрые маневры, тактические уловки! Но помни: самый трудный противник-ты сам! Модернизируй своего робота, увеличивай огневую мощь. Стань ужасом в глазах твоих противников! Показывай лучшие результаты на поле боя! Приглашай друзей и сражайся вместе с ними абсолютно Бесплатно! Особенности WWR World of Warfare Robots:
Images (1): 
|
|||||
| Concerts with dances, songs of android robots offered in China … | https://tass.com/society/2084819 | 1 | Feb 11, 2026 00:03 | active | |
Concerts with dances, songs of android robots offered in China - Society & Culture - TASSURL: https://tass.com/society/2084819 Description: The service costs for about $145 for a 1.5-hour program, including a visiting engineer to install and configure the equipment Content:
HONG KONG, February 10. /TASS/. Shanghai-based Agibot offers organizing concerts with dances and songs of android robots, the South China Morning Post reports. The service costs for about $145 for a 1.5-hour program, including a visiting engineer to install and configure the equipment, the news outlet said. Android robots can sing, dance and pose. A concert was even recorded by the company to promote this service.
Images (1): 
|
|||||
| Il nuovo Atlas presentato al CES: quando il robot diventa … | https://www.ilgiornale.it/news/nuove-fr… | 1 | Feb 10, 2026 16:00 | active | |
Il nuovo Atlas presentato al CES: quando il robot diventa noioso, il futuro diventa serio - il GiornaleDescription: Il messaggio è cambiato, questo Atlas non intrattiene: meno spettacolare, pronto a andare in fabbrica, non vede l’ora Content:
Stai utilizzando Internet Eplorer: è un browser molto vecchio, non sicuro, e non più supportato neanche da Microsoft stessa, che l'ha creato. Per favore utilizza un browser moderno come Edge, Firefox, Chrome o uno qualunque degli altri a disposizione gratuitamente. Il messaggio è cambiato, questo Atlas non intrattiene: meno spettacolare, pronto a andare in fabbrica, non vede l’ora Che carino questo robot, davvero, ne stanno parlando tutti ed è virale in ogni social. È sempre il solito Atlas, il quale però al CES di Las Vegas non salta più né fa parkour o salti mortali da circo. Anzi, sta fermo, composto, serissimo, è proprio cresciuto di testa, e per questo da guardare con più attenzione del solito. Insomma, per anni Boston Dynamics è stata la fabbrica dei video virali, il posto dove il futuro mostrava acrobazie senza arrivare mai da nessuna parte, e Atlas era perfetto per questo ruolo, quando lo si vedeva correre, saltare, recuperare l’equilibrio come un ginnasta metallico, una dimostrazione continua di ciò che era possibile fare, non di ciò che serviva fare. Al CES, invece, il messaggio è cambiato, questo Atlas non intrattiene: meno spettacolare, pronto a andare in fabbrica, non vede l’ora. Nei filmati lo si vede camminare con movimenti più sobri, e entrare in ambienti industriali manipolando oggetti con estrema precisione, e sollevare carichi muovendosi senza essere guidato passo passo. È progettato per svolgere compiti ripetitivi e faticosi, per lavorare in spazi dove al momento serve ancora una presenza umana continua, è elettrico (non più idraulico come nelle prime versioni), ha maggiore autonomia, può sostituirsi la batteria senza intervento umano, e è pensato per operare a lungo in ambienti sporchi e rumorosi. Atlas, il delizioso Atlas, rappresenta il volto più riconoscibile di qualcosa di più ampio. La robotica industriale, mentre tutti guardavano l’intelligenza artificiale che scrive testi e genera immagini e video per mettere se stessi vicino a Indiana Jones o Michael Jackson, si è saldata a un’AI meno appariscente e più concreta che permette a una macchina di muoversi in un ambiente reale senza che tutto sia progettato attorno a lei. E mica c’è solo lui. Oltre a Boston Dynamics con Atlas, Tesla lavora da tempo su Optimus, Figure AI punta alla produzione su larga scala per logistica e manifattura, Agility Robotics sviluppa Digit per magazzini e supply chain, Apptronik con Apollo e Sanctuary AI con Phoenix lavorano su umanoidi generalisti, mentre in Asia aziende come Unitree Robotics e programmi industriali cinesi e coreani spingono verso un’adozione rapida in fabbrica. Un nuovo ecosistema globale lavorativo si sta strutturando, non sono più prototipi da fiera. Che carino, ripeto, questo Atlas bravo ragazzo, e anche un po’ preoccupante. Meno divertente da vedere, darà il suo meglio al lavoro. Solo che a forza di sostituire lavoratori a questa velocità, la domanda non è ideologica, è pratica: se il cambiamento corre così, il resto riuscirà davvero a stargli dietro? E del resto, soprattutto, cosa resta? Il reddito universale immaginato da Musk e Gates? Perché avremo bisogno di consumatori, o saranno i robot a comprare ciò che produciamo? Vorrei chiederlo a un economista ma su dieci mi darebbero dieci risposte diverse, chi apocalittiche, chi integrate, tanto per ricordare il famoso saggio di Umberto Eco, e poi i tempi sono cambiati, diciamo la verità, neppure gli apocalittici possono fare a meno dei circuiti integrati, forse giusto Mauro Corona. Spiacenti, devi abilitare javascript per poter procedere. Spiacenti, devi abilitare javascript per poter procedere.
Images (1): 
|
|||||
| Atlas robot di Boston Dynamics stupisce al CES, il futuro … | https://assodigitale.it/atlas-robot-di-… | 1 | Feb 10, 2026 16:00 | active | |
Atlas robot di Boston Dynamics stupisce al CES, il futuro della routine automatizzata è già realtà – ASSODIGITALE.ITDescription: Dal circo alla fabbrica: atlas diventa uno strumentoAtlas smette i panni del funambolo e si presenta al CES di Las Vegas come macchina di produzione. Content:
NEWS TECH & FINTECH + AI & LIFESTYLE Atlas smette i panni del funambolo e si presenta al CES di Las Vegas come macchina di produzione. Niente parkour, niente salti: postura composta, movimenti sobri, obiettivo chiaro. Nei filmati entra in ambienti industriali, manipola oggetti con precisione e solleva carichi senza istruzioni puntuali, mostrando controllo e affidabilità operativa. Il passaggio dall’idraulica all’architettura completamente elettrica aumenta autonomia e manutennibilità: la batteria è sostituibile senza intervento umano, l’operatività è pensata per turni prolungati in spazi sporchi e rumorosi. Qui la spettacolarità lascia il posto alla ripetibilità, la vera metrica che conta in fabbrica. Il nuovo posizionamento rende Atlas un attrezzo produttivo: esegue compiti faticosi e ripetitivi, presidia aree dove oggi è richiesta presenza costante di personale, integrandosi nei flussi senza che l’intero ambiente venga ridisegnato intorno al robot. È una dimostrazione di maturazione tecnologica: meno showreel, più cicli di lavoro. La “deliziosa” icona virale diventa interfaccia concreta tra automazione avanzata e bisogni reali di officine e magazzini. Il messaggio è netto: l’era dei prototipi da fiera cede il passo a strumenti che chiedono solo una linea di montaggio su cui essere impiegati. La svolta è l’integrazione tra robotica mobile e AI operativa: non generazione di contenuti, ma percezione, pianificazione e controllo per muoversi in contesti reali senza scenografie su misura. Atlas agisce con destrezza su oggetti e carichi, adattandosi a variabilità e imprevisti tipici di officine e magazzini. Meno coreografie, più pipeline industriali: visione artificiale, modelli di policy e sistemi di controllo chiudono il ciclo tra sensori e attuatori, privilegiando affidabilità, sicurezza e ripetibilità. Il salto all’architettura elettrica riduce complessità e tempi di fermo, abilitando turni prolungati e batteria sostituibile in autonomia. ▷ QUI RISPARMI: CLICCA ORA! Il quadro competitivo conferma la direzione: Tesla Optimus, Figure AI per logistica e manifattura, Agility Robotics con Digit per magazzini e supply chain, Apptronik con Apollo e Sanctuary AI con Phoenix puntano su umanoidi generalisti; in Asia, Unitree Robotics e programmi industriali cinesi e coreani accelerano l’adozione in fabbrica. ▷ MONETIZZA I TUOI ASSET > TOKENIZZA SUBITO! CLICCA QUI ORA! Non più prototipi da palcoscenico: si struttura un ecosistema produttivo globale, dove il valore si misura in cicli chiusi, MTBF e costi per ora di lavoro, con robot pronti a entrare in linea senza interrompere il flusso operativo. Atlas introduce un salto di produttività: compiti ripetitivi e pesanti vengono eseguiti con costanza, riducendo infortuni, errori e tempi di fermo. L’operatività elettrica e la batteria sostituibile in autonomia abbattono i costi di manutenzione e favoriscono turni continui, con effetti diretti su throughput e qualità. L’efficienza però ridisegna organici e mansioni: attività a basso valore rischiano l’erosione, mentre cresce la domanda di profili per supervisione, integrazione di linea, sicurezza e training dei sistemi. La transizione richiede upskilling mirato e metriche chiare su sicurezza, coesistenza uomo-macchina e responsabilità in caso di incidenti. La velocità dell’adozione apre interrogativi economici: come distribuire i benefici della produttività? Si discute di schemi di partecipazione ai profitti, riforma degli ammortizzatori e ipotesi di reddito di base sostenute da figure come Elon Musk e Bill Gates. Il rischio non è teorico ma operativo: supply chain e imprese che non aggiornano processi e formazione possono restare indietro. Servono standard condivisi, audit algoritmici e linee guida per l’integrazione in ambienti rumorosi e complessi, dove oggi la presenza umana continua è ancora la norma. Il team editoriale di Assodigitale coordina la pubblicazione di notizie, analisi e approfondimenti quotidiani dal mondo dell'innovazione, della tecnologia e dei mercati digitali. Questo account raccoglie i contributi storici della testata, i comunicati stampa certificati e le inchieste collettive curate dai nostri giornalisti e analisti. Fondata per esplorare l'impatto della trasformazione digitale sulla società e sull'economia, la Redazione di Assodigitale si impegna a fornire un'informazione accurata, indipendente e verificata, seguendo rigorosi standard deontologici e di fact-checking per garantire ai lettori una visione chiara ed esperta del futuro tecnologico." Per tutte le vostre esigenze editoriali e per proporci progetti speciali di Branded Content oppure per inviare alla redazione prodotti per recensioni e prove tecniche potete contattarci direttamente scrivendo alla redazione : CLICCA QUI We prioritize accuracy and integrity in our content. Here's how we maintain high standards: Our content is carefully reviewed by experienced professionals to ensure accuracy and relevance. Look for the expert-reviewed label to read content you can trust. ISCRIVITI SUBITO AL NOSTRO FEED SU GOOGLE NEWS ==> CLICCA QUI! Per acquistare pubblicità CLICCA QUI Per inviarci comunicati stampa e per proporci prodotti da testare prodotti CLICCA QUI Per acquistare pubblicità potete richiedere una offerta personalizzata scrivendo al reparto pubblicitario. Per pubblicare un comunicato stampa potete richiedere una offerta commerciale scrivendo alla redazione. Per inviarci prodotti per una recensione giornalistica potete scrivere QUI Per informazioni & contatti generali potete scrivere alla segreteria. Tutti i contenuti pubblicati all’interno del sito #ASSODIGITALE. “Copyright 2024” non sono duplicabili e/o riproducibili in nessuna forma, ma possono essere citati inserendo un link diretto e previa comunicazione via mail. I contenuti pubblicati su Assodigitale.it possono contenere link di affiliazione al Programma Amazon EU. In qualità di affiliato Amazon, il sito percepisce una commissione sugli acquisti idonei effettuati tramite i link presenti nelle pagine, senza alcun costo aggiuntivo per l’utente. Alcune immagini e testi presenti su questo sito web sono generate tramite sistemi di intelligenza artificiale (IA) e hanno finalità esclusivamente illustrative. Tali immagini non rappresentano persone reali, né vanno intese come fotografie autentiche dei soggetti. Per chiarimenti, segnalazioni o istanze formali è possibile contattare la redazione. #ASSODIGITALE. da oltre 20 anni rappresenta una affidabile fonte giornalistica accreditata e certificata da Google News per la qualità dei suoi contenuti. #ASSODIGITALE. è una testata editoriale storica che dal 2004 ha la missione di raccontare come la tecnologia può essere utile per migliorare la vita quotidiana approfondendo le tematiche relative a: TECH & FINTECH + AI + CRYPTO + BLOCKCHAIN + METAVERSE & LIFESTYLE + IOT + AUTOMOTIVE + EV + SMART CITIES + GAMING + STARTUP. Inserisci la chiave di ricerca e premi invio. Indice dei Contenuti:
Images (1): 
|
|||||
| Beijing to host world's first human-robot half-marathon in April | http://www.ecns.cn/news/sci-tech/2025-0… | 1 | Feb 09, 2026 16:00 | active | |
Beijing to host world's first human-robot half-marathon in AprilURL: http://www.ecns.cn/news/sci-tech/2025-03-05/detail-ihepiwyi1891766.shtml Content:
China is set to welcome global "athletes" for a groundbreaking event in April, as it hosts the world's first marathon featuring both human and humanoid robot runners, the event organizer, Beijing Economic-Technological Development Area, announced on Tuesday. The event will take place on April 13, with humanoid robots participating in a half-marathon alongside approximately 12,000 human runners. The robots, representing dozens of companies, will race in a separate lane for safety reasons. Li Quan, deputy head of the Beijing Economic-Technological Development Area, said at a news conference that the competition will set a cutoff time of around three and a half hours for the robots. The top three finishers, whether human or robot, will receive prizes. Robots will be awarded for categories such as race completion, best endurance and most popular robot. "During the race, robots are allowed to change batteries," Li explained. "Robot teams from a company can also participate in relay form by swapping robots. Performance will be evaluated based on finishing time and the number of robot changes during the race. Each robot change will incur a 10-minute penalty." Participating robots must have a humanoid appearance and mechanical structures that allow them to walk or run on two legs, excluding wheeled robots. Both remote-controlled and fully autonomous robots are eligible. "We hope that this event will not only showcase achievements in the humanoid robotics industry, but also spark discussions and deepen the public's understanding of robot capabilities, which will help accelerate industry development," Li said. Companies, research institutions, robot clubs and universities from around the world are invited to participate in the marathon. Registration will be open from Wednesday to March 11. "Beijing's technological innovation is accelerating in fields such as large-scale artificial intelligence models, multi-source information perception and human-machine natural interaction," said Liu Weiliang, deputy head of the Beijing Municipal Bureau of Economy and Information Technology. "Robots are evolving rapidly, with innovative humanoid products constantly emerging, demonstrating an unprecedented pace of both physical and intellectual advancement." The Beijing Economic-Technological Development Area, which is in the process of developing into an artificial intelligence hub, also announced plans last week to hire up to 10,000 robots from robotics companies over the next two years, with more than 1,000 positions specifically for humanoid robots. "The area's government has built a bridge for technology implementation through scenarios, policies and services, supporting efficient communication between enterprises and schools," said Cai Chen, executive director of Beijing-based AI and humanoid robotics company UBTech Robotics. At a news conference on Friday, the humanoid robot "Tiangong" appeared, unveiling a unique "job advertisement" inviting global robotics companies to participate in practical training and hire out their robots for work in the area. The jobs cover nine sectors: advanced manufacturing, education, landscaping, industrial parks, commercial services, healthcare, power inspection, municipal management and community property management. The robots will be deployed across industrial enterprises, hospitals, schools and public spaces within the area. In the manufacturing sector, pilot projects with companies such as JD, Xiaomi Automotive and Bayer will focus on using robots for material handling, quality inspection and packaging. Robots and humanoid robots will be integrated into production lines by the end of next year, with over 5,000 units expected to be deployed. Additionally, the area plans to deploy humanoid robots in factories, mines, power plants and other hazardous environments, alleviating industrial workers from problematic conditions such as high temperatures, pressure and dust.
Images (1): 
|
|||||
| Boston Dynamics’ new Atlas humanoid robot pulls off backflip with … | https://www.notebookcheck.net/Boston-Dy… | 1 | Feb 09, 2026 08:00 | active | |
Boston Dynamics’ new Atlas humanoid robot pulls off backflip with cartwheel - NotebookCheck.net NewsDescription: On its first attempted backflip, Atlas lost a hand. Now, the robot can combine the move with a cartwheel. Atlas has also learned to walk naturally, although Boston Dynamics didn’t pull this stunt off without accidents. Content:
Boston Dynamics' new Atlas robot is slowly gaining the capabilities of its hydraulic-based predecessor named Atlas HD. In a new video, Boston Dynamics and the RAI Institute show Atlas performing a backflip coming out of a cartwheel, and the humanoid robot doesn’t take damage or lose its balance while doing so. As is typical of Boston Dynamics, the company also shows how it got there. You can see the robot falling during the complex maneuver, but these falls are not much of a problem. The robot can usually catch itself during the stunts. Teaching Atlas to run faster appears to be a bit more difficult, as the robot loses a few components after crashing onto its face or just runs into pallets. Nevertheless, the researchers got Atlas to walk with a more natural gait. Until now, the robot often looked awkward while walking rather slowly. For commercial use cases, this hasn’t mattered much thus far. Atlas has now been launched in a modified version as an enterprise product. This version doesn’t look quite as elegant as the research version of Atlas, which has apparently reached the end of the line. The tests that are showcased in the video were supposedly "one final push to test the limits". Boston Dynamics
Images (1): 
|
|||||
| Cognitive and artificial intelligence evaluation framework | Artificial Intelligence Review … | https://link.springer.com/article/10.10… | 1 | Feb 08, 2026 08:00 | active | |
Cognitive and artificial intelligence evaluation framework | Artificial Intelligence Review | Springer Nature LinkDescription: The Cognitive and Artificial Intelligence Evaluation (CAIE) framework provides a structured and domain-independent methodology for assessing the intelligen Content:
Advertisement You have full access to this open access article 125 Accesses Explore all metrics We are providing an unedited version of this manuscript to give early access to its findings. Before final publication, the manuscript will undergo further editing. Please note there may be errors present which affect the content, and all legal disclaimers apply. The Cognitive and Artificial Intelligence Evaluation (CAIE) framework provides a structured and domain-independent methodology for assessing the intelligence of artificial and information systems in a broader perspective. The primary achievement of this research is the categorization of over ninety cognitive features into six evaluation zones, supported by a two-stage scoring model that combines detailed feature-level analysis with higher-level structural interpretation. This approach has proven effective in identifying system maturity and developmental potential, offering systematic insights into both strengths and weaknesses across cognitive domains. The practical validation through use-case analysis demonstrates that CAIE is adaptable to diverse technological contexts, enabling consistent comparison between AI and non-AI systems. By treating cognitive features as measurable and comparable attributes, the framework introduces a coherent mechanism for benchmarking, scalability, and strategic development. The main contribution of this work lies in advancing both academic research and real-world implementation by delivering a cognitively informed, practically relevant tool that bridges theoretical evaluation concepts with actionable methods for designing and improving intelligent systems. No datasets were generated or analysed during the current study. Ackerman R, Thompson VA (2017) Meta-reasoning: monitoring and control of thinking and reasoning. Trends Cogn Sci 21(8):607–617 Google Scholar Adams S, Arel I, Bach J, Coop R, Furlan R, Goertzel B, Hall JS, Samsonovich A, Scheutz M, Schlesinger M et al (2012) Mapping the landscape of human-level artificial general intelligence. AI Mag 33(1):25–42 Google Scholar Anderson JR (1996) ACT: a simple theory of complex cognition. Am Psychol 51(4):355 Google Scholar Anna M-PD (2024) Kognitív információs rendszerek alkalmazhatóságának vizsgálata Atkinson RC, Shiffrin RM (1968) Human memory: a proposed system and its control processes. In: Psychology of learning and motivation, vol 2. Academic, pp 89–195. https://doi.org/10.1016/S0079-7421(08)60422-3 Baddeley A (2000) The episodic buffer: a new component of working memory? Trends Cogn Sci 4(11):417–423. https://doi.org/10.1016/S1364-6613(00)01538-2 Google Scholar Baddeley AD, Hitch G (1974) Working memory. In: Psychology of learning and motivation, vol 8. Academic, pp 47–89. https://doi.org/10.1016/S0079-7421(08)60452-1 Baranyi P, Csapo AB (2024) Concepts of cognitive infocommunications. Infocommun J 16(Joint Special Issue on Cognitive Infocommunications and Cognitive Aspects of Virtual Reality):37–48 Google Scholar Baranyi P, Csapo A, Sallai G (2015) Cognitive infocommunications (CogInfoCom). Springer, Heidelberg Google Scholar Bartha P (2013) Analogy and analogical reasoning. In: Zalta EN (ed) The Stanford encyclopedia of philosophy, Spring 2019 edition. Metaphysics Research Lab, Stanford University, p 80. https://plato.stanford.edu/archives/spr2019/entries/reasoning-analogy/ Berger CR (2020) Planning strategic interaction: attaining goals through communicative action. Routledge, New York Google Scholar Berry MW, Mohamed A, Yap BW (2019) Supervised and unsupervised learning for data science. Springer, Berlin Google Scholar Betti F, Staiano J, Baraldi L, Baraldi L, Cucchiara R, Sebe N (2023) Let’s vice! Mimicking human cognitive behavior in image generation evaluation. In: Proceedings of the 31st ACM international conference on multimedia. MM ’23, 2023. Association for Computing Machinery, New York, pp 9306–9312. https://doi.org/10.1145/3581783.3612706 Bird CM (2017) The role of the hippocampus in recognition memory. Cortex 93:155–165. https://doi.org/10.1016/j.cortex.2017.05.016 Google Scholar Borovcnik M (2006) Probabilistic and statistical thinking. In: Proceedings of the fourth congress of the European Society for Research in Mathematics Education, 2006, pp 484–506 Button C, Davids K, Bennett S (2008) Dynamics of skill acquisition. Human Kinetics, Champaign Google Scholar Carlson JM, Doyle J (2002) Complexity and robustness. Proc Natl Acad Sci USA 99(Suppl 1):2538–2545 Google Scholar Chan MY, Haber S, Drew LM, Park DC (2014) Training older adults to use tablet computers: does it enhance cognitive function? Gerontologist 56(3):475–484. https://doi.org/10.1093/geront/gnu057 Google Scholar Chen S, Liu J, Xu Y (2021) A logical reasoning based decision making method for handling qualitative knowledge. Int J Approx Reason 129:49–63 Google Scholar Chiba AA, Krichmar JL (2020) Neurobiologically inspired self-monitoring systems. Proc IEEE 108(7):976–986 Google Scholar Chollet F (2019) On the measure of intelligence. arXiv preprint. arXiv:1911.01547 Cook M (2001) Memory and complex skills. IET Control Eng Ser 60:17–34 https://doi.org/10.1049/PBCE060E Google Scholar Cristofori I, Cohen-Zimerman S, Grafman J (2019) Chapter 11—Executive functions. Handb Clin Neurol 163:197–219. https://doi.org/10.1016/B978-0-12-804281-6.00011-2 Google Scholar Dokic J (2014) Feeling the past: a two-tiered account of episodic memory. Rev Philos Psychol 5(3):413–426 Google Scholar Dubey R, Altay N, Blome C (2017) Swift trust and commitment: the missing links for humanitarian supply chain coordination? Ann Oper Res 283(1):159–177 Google Scholar Duchek S (2020) Organizational resilience: a capability-based conceptualization. Bus Res 13(1):215–246 Google Scholar Duffin E, Bland AR, Schaefer A, De Kamps M (2014) Differential effects of reward and punishment in decision making under uncertainty: a computational study. Front Neurosci 8:90. https://doi.org/10.3389/fnins.2014.00030 Google Scholar Durach CF, Machuca JAD, Wamba SF (2015) Antecedents and dimensions of supply chain robustness: a systematic literature review. Int J Prod Res Earley P, Ang S (2003) Cultural intelligence: individual interactions across cultures. Bibliovault OAI Repository, The University of Chicago Press European Union (2024) Regulation-eu- 2024/1689-en-eur-lex. EUR-Lex: access to European Union law. European Union, Brussels Google Scholar Ewen J, Mostofsky S (2021) Procedural memory. In: Volkmar FR (ed) Encyclopedia of autism spectrum disorders. Springer, Cham, pp 3678–3684. https://doi.org/10.1007/978-3-319-91280-6_1740 Google Scholar Fischer R, Plessow F (2015) Efficient multitasking: parallel versus serial processing of multiple tasks. Front Psychol 6:1366 Google Scholar Fonollosa J, Neftci E, Rabinovich M (2015) Learning of chunking sequences in cognition and behavior. PLoS Comput Biol 11(11):1004592 Google Scholar Franklin S, Ramamurthy U, D’Mello SK, McCauley L, Negatu A, Silva RL, Datla V (2007) LIDA: a computational model of global workspace theory and developmental learning. Cognitive Computing Research Group at University of Memphis Digital Commons, Memphis Google Scholar Galin RR, Meshcheryakov RV (2020) Human–robot interaction efficiency and human–robot collaboration. In: Robotics: Industry 4.0 issues and new intelligent control paradigms. Springer, Cham, pp 55–63 Gittell JH, Cameron K, Lim S, Rivas V (2006) Relationships, layoffs, and organizational resilience: airline industry responses to September 11. J Appl Behav Sci 42(3):300–329 Google Scholar Gobet F, Lane PCR (2012). In: Seel NM (ed) Chunking mechanisms and learning. Springer, Boston, pp 541–544. https://doi.org/10.1007/978-1-4419-1428-6_1731 Google Scholar Goertzel B, Pennachin C, Geisweiller N, Goertzel B, Pennachin C, Geisweiller N (2014) Knowledge representation using the AtomSpace. In: Engineering general intelligence, Part 2: the CogPrime architecture for integrative, embodied AGI. Atlantis Press, Dordrecht, pp 31–54 Größler A (2020) Antifragility as a descriptive concept. J Manag Inq 29(1):108–112. https://doi.org/10.1177/1056492619850443 Google Scholar Gudelli VR (2023) Ai-powered insights for performance optimization in AWS cloud environments. Int J Sci Res Appl 10(2):90 Google Scholar Haimes YY (2009) On the definition of resilience in systems. Risk Anal 29(4):498–501 Google Scholar Haimes YY (2015) Risk modeling, assessment, and management. Wiley, Hoboken Google Scholar Halpern DF (2013) Thought and knowledge: an introduction to critical thinking. Psychology Press, London Google Scholar Henschel A, Hortensius R, Cross ES (2020) Social cognition in the age of human–robot interaction. Trends Neurosci 43(6):373–384 Google Scholar Hoffman B (2012) Cognitive efficiency: a conceptual and methodological comparison. Learn Instr 22(2):133–144. https://doi.org/10.1016/j.learninstruc.2011.09.001 Google Scholar Holding, Dennis H (2014) Echoic storage, Psychology Press, 89–118 Holling CS (1973) Resilience and stability of ecological systems. Annu Rev Ecol Syst 4:1–23 Google Scholar Iiduka H (2022) Appropriate learning rates of adaptive learning rate optimization algorithms for training deep neural networks. IEEE Trans Cybern 52(12):13250–13261. https://doi.org/10.1109/TCYB.2021.3107415 Google Scholar Jiang Y, Song J-H, Rigas A (2005) High-capacity spatial contextual memory. Psychonom Bull Rev 12:524–529. https://doi.org/10.3758/BF03193799 Google Scholar Kahn JM, Freimuth RR, Kline J (2018) Strategic flexibility in organizations. Manag Sci Kamalahmadi M, Parast MM (2016) A review of the literature on the principles of enterprise and supply chain resilience: major findings and directions for future research. Int J Prod Econ 171(Part 1):116–133 Google Scholar Kelly JE, Hamm S (2013) Smart machines: IBM’s Watson and the era of cognitive computing. Columbia University Press, New York Google Scholar Khalil K, Asgher U, Ayaz Y, Ahmad R, Ruiz JA, Oka N, Ali S, Sajid M (2021) Cognitive computing for human–machine interaction: an IBM Watson implementation. In: Advances in neuroergonomics and cognitive engineering: proceedings of the AHFE 2020 virtual conferences on neuroergonomics and cognitive engineering, and industrial cognitive ergonomics and engineering psychology, 16–20 July 2020, USA. Springer, pp 400–406 Khoee AG, Yu Y, Feldt R (2024) Domain generalization through meta-learning: a survey. Artif Intell Rev 57(10):285 Google Scholar Kitano H (2004) Biological robustness. Nat Rev Genet 5(11):826–837 Google Scholar Kobasa SC (1982) The Hardy personality: toward a social psychology of stress and health. In: Social psychology of health and illness. Psychology Press, London Kotseruba I, Tsotsos JK (2020) 40 Years of cognitive architectures: core cognitive abilities and practical applications. Artif Intell Rev 53(1):17–94 Google Scholar Krishnamoorthy D, Skogestad S (2022) Real-time optimization as a feedback control problem—a review. Comput Chem Eng 161:107723 Google Scholar Kunc M, O’Brien FA (2017) Exploring the development of a methodology for scenario use: combining scenario and resource mapping approaches. Technol Forecast Soc Change 124:150–159 Google Scholar Laird JE (2019) The SOAR cognitive architecture. MIT Press, Cambridge Google Scholar Lengnick-Hall CA, Beck TE, Lengnick-Hall ML (2011) Developing a capacity for organizational resilience through strategic human resource management. Hum Resour Manag Rev 21(3):243–255 Google Scholar Madni AM, Jackson S (2009) Towards a Conceptual Framework for Resilience Engineering. IEEE Syst J 3(2):181–191. https://doi.org/10.1109/JSYST.2009.2017397 Google Scholar Mahjoubi S, Barhemat R, Meng W, Bao Y (2025) Review of AI-assisted design of low-carbon cost-effective concrete toward carbon neutrality. Artif Intell Rev 58(8):225 Google Scholar Mallak L (1998) Putting organizational resilience to work. Ind Manag 40(6):8–13 Google Scholar Mattyasovszky-Philipp D, Molnár B (2020) An architectural approach to cognitive information system. Acta Polytech Hung 17(2):237–253. https://doi.org/10.12700/aph.17.2.2020.2.13 Google Scholar Mattyasovszky-Philipp D, Molnár B (2023) Cognitive information systems and related architecture issues. Acta Polytech Hung 20(5):91–108 Google Scholar Mattyasovszky-Philipp D, Putnoki AM, Molnár B (2022) The unrepeatable human mind—challenges in the development of cognitive information systems—what makes a machine human? Electronics 11(3):394. https://doi.org/10.3390/electronics11030394 Google Scholar Meyer AD (1982) Adapting to environmental jolts. Adm Sci Q 27(4):515–537 Google Scholar Molina M (2022) What is an intelligent system? https://doi.org/10.48550/arXiv.2009.09083 Molnár B, Mattyasovszky-Philipp D (2023). In: Klempous R, Nikodem J, Baranyi PZ (eds) Cognitive resonance and the architecture issues of cognitive information systems. Springer, Cham, pp 29–56 Google Scholar Moujahid A, Dornaika F (2025) Advanced unsupervised learning: a comprehensive overview of multi-view clustering techniques. Artif Intell Rev 58(8):1–52 Google Scholar Norris D (2017) Short-term memory and long-term memory are still different. Psychol Bull 143(9):992 Google Scholar Perera C, Zaslavsky A, Christen P, Georgakopoulos D (2014) Context aware computing for the Internet of Things: a survey. IEEE Commun Surv Tutor 16(1):414–454. https://doi.org/10.1109/SURV.2013.042313.00197 Google Scholar Pezzulo G (2007) Working memory. Academia, San Francisco Google Scholar Polignano M, Narducci F, Gemmis M, Semeraro G (2021) Towards emotion-aware recommender systems: an affective coherence model based on emotion-driven behaviors. Expert Syst Appl 170:114382 Google Scholar Pourpanah F, Abdar M, Luo Y, Zhou X, Wang R, Lim CP, Wang X-Z, Wu QJ (2022) A review of generalized zero-shot learning methods. IEEE Trans Pattern Anal Mach Intell 45(4):4051–4070 Google Scholar Proctor RW, Proctor JD (2021) Sensation and perception. In: Handbook of human factors and ergonomics. Wiley, Hoboken, pp 55–90 Pujari V (2019) Muscle memory and the brain: how physical skills are stored and retrieved. J Adv Med Dent Sci Res 7:273–279 Google Scholar Putnoki AM (2024) Cognitive features in SAP business process management. In: SAP UCC, 2024 Putnoki AM, Orosz T (2023) Artificial intelligence and cognitive information systems: revolutionizing business with generative artificial intelligence and robotic process automation. In: The international conference on recent innovations in computing, 2023. Springer, pp 39–70 Rawat DB (2021) Secure and trustworthy machine learning/artificial intelligence for multi-domain operations. In: Artificial intelligence and machine learning for multi-domain operations applications III, proceedings, vol 11746. International Society for Optics and Photonics, p 1174609. https://doi.org/10.1117/12.2592860 Reale C, Russell R (2022) Learning and understanding a disentangled feature representation for hidden parameters in reinforcement learning. arXiv preprint. arXiv:2211.16315 Ren M, Chen N, Qiu H (2023) Human–machine collaborative decision-making: an evolutionary roadmap based on cognitive intelligence. Int J Soc Robot 15:1–14. https://doi.org/10.1007/s12369-023-01020-1 Google Scholar Roediger HL, Zaromb FM, Lin W (2017) 1.02—A typology of memory terms\(\star \). In: Byrne JH (ed) Learning and memory: a comprehensive reference, 2nd edn. Academic, Oxford, pp 7–19. https://doi.org/10.1016/B978-0-12-809324-5.21003-1 Google Scholar Rudolph JW, Repenning NP (2002) Disaster dynamics: understanding the role of quantity in organizational collapse. Adm Sci Q 47(1):1–30 Google Scholar Russell SJ, Norvig P (2016) Artificial intelligence: a modern approach. Pearson, London Google Scholar Samsonovich AV (2013) Emotional biologically inspired cognitive architecture. Biol Inspired Cogn Archit 6:109–125 Google Scholar Sayin B, Yang J, Chen X, Passerini A, Casati F (2025) Rethinking and recomputing the value of machine learning models. Artif Intell Rev 58(8):1–23 Google Scholar Sciutti A, Damonte F, Alloisio M, Sandini G (2019) Visuo-haptic exploration for multimodal memory. Front Integr Neurosci 13:15 Google Scholar Seidel S, Müller-Wienbergen F, Becker J (2010) The concept of creativity in the information systems discipline: past, present, and prospects. Commun Assoc Inf Syst 27(1):14 Google Scholar Sha AS, Nunes BP, Haller A (2024) “Forgetting” in machine learning and beyond: a survey. arXiv preprint. arXiv:2405.20620 Sheffi Y (2005) The resilient enterprise: overcoming vulnerability for competitive advantage. The MIT Press, Cambridge Google Scholar Shiyan I, Shannon N, Belolutskaya A (2024) Dialectical thinking. In: The Routledge international handbook of dialectical thinking. Routledge, New York, p 428 Silver D, Huang A, Maddison CJ, Guez A, Sifre L, Driessche G, Schrittwieser J, Antonoglou I, Panneershelvam V, Lanctot M, Dieleman S, Grewe D, Nham J, Kalchbrenner N, Sutskever I, Lillicrap T, Leach M, Kavukcuoglu K, Graepel T, Hassabis D (2016) Mastering the game of Go with deep neural networks and tree search. Nature 529(7587):484–489. https://doi.org/10.1038/nature16961 Google Scholar Sontheimer H (2021) Chapter 4—aging, dementia, and Alzheimer disease*. In: Diseases of the nervous system. Academic, New York, pp 81–107. https://doi.org/10.1016/B978-0-12-821228-8.00004-4 Stoykova S, Hrischev R (2024) Modeling workflows and processes in the cloud ERP platform SAP BTP. AIP Conf Proc 2980:020004 Google Scholar Sun R (2017) The CLARION cognitive architecture: toward the mind. In: The Oxford handbook of cognitive science. Oxford University Press, Oxford, pp 117–133 Sun R, Merrill E, Peterson T (2001) From implicit skills to explicit knowledge: a bottom-up model of skill learning. Cogn Sci 25(2):203–244 Google Scholar Sun L, Ji S, Ye J (2008) Hypergraph spectral learning for multi-label classification. In: Proceedings of the fourteenth ACM SIGKDD international conference on knowledge discovery and data mining, 2008, pp 668–676. https://doi.org/10.1145/1401890.1401971 Sutcliffe KM, Vogus TJ (2003) Organizing for resilience. In: Positive Organizational Scholarship. Berrett-Koehler, San Francisco, pp 94–110 Swaminathan N, Danks D (2024) Application of the NIST AI risk management framework to surveillance technology. arXiv:2403.15646 Taleb NN (2012) Antifragile: things that gain from disorder. Penguin, London Google Scholar Thatere A, Jirapure A, Chawhan MD, Meshram A, Verma P (2024) Original research article integrating multisensory information fusion and interaction technologies in smart healthcare systems. J. Auton Intell 7(5):1564 Google Scholar Uddin M, Irshad MS, Kandhro IA, Alanazi F, Ahmed F, Maaz M, Hussain S, Ullah SS (2025) Generative ai revolution in cybersecurity: a comprehensive review of threat intelligence and operations. Artif Intell Rev 58(8):1–39 Google Scholar Ulrich R, Dietz K (1985) The short-term storage as a buffer memory between long-term storage and the motor system: a simultaneous-processing model. J Math Psychol 29(3):243–270. https://doi.org/10.1016/0022-2496(85)90008-2 Google Scholar Vernon D (2014) Artificial cognitive systems: a primer. The MIT Press, Cambridge Google Scholar Walker B, Holling CS, Carpenter SR, Kinzig A (2004) Resilience, adaptability and transformability in social–ecological systems. Ecol Soc 9(2):5 Google Scholar Wan C, Cai P, Wang M, Qian Y, Huang W, Chen X (2020) Artificial sensory memory. Adv Mater 32(15):1902434 Google Scholar Wang Y (2007) The theoretical framework of cognitive informatics. Int J Cogn Inform Nat Intell 1(1):1–27 Google Scholar Wang Y (2013) Neuroinformatics models of human memory: mapping the cognitive functions of memory onto neurophysiological structures of the brain. Int J Cogn Inform Nat Intell 7(1):98–122 Google Scholar Wang G (2017) DGCC: data-driven granular cognitive computing. Granul Comput 2:1–13. https://doi.org/10.1007/s41066-017-0048-3 Google Scholar Wang Y, Zhu H, Hou M (2013) Role-based human–computer interactions. In: Cognitive informatics for revealing human cognition: knowledge manipulations in natural intelligence. IGI Global Scientific Publishing, New York, pp 35–53. https://doi.org/10.4018/978-1-4666-2476-4.ch003 Wilson HJ, Daugherty PR (2018) Collaborative intelligence: humans and AI are joining forces. Harv Bus Rev 96(4):114–123 Google Scholar Wong J, Li H, Lai J (2008a) Evaluating the system intelligence of the intelligent building systems: Part 1: development of key intelligent indicators and conceptual analytical framework. Autom Constr 17(3):284–302 Google Scholar Wong J, Li H, Lai J (2008b) Evaluating the system intelligence of the intelligent building systems: Part 2: construction and validation of analytical models. Autom Constr 17(3):303–321 Google Scholar Wormald S, Maldaner MK, O’Connor KD, Dizon-Paradis OP, Woodard DL (2025) Abstracting general syntax for XAI after decomposing explanation sub-components. Artif Intell Rev 58(8):1–58 Google Scholar Yang X-S, Koziel S, Leifsson L (2014) Computational optimization, modelling and simulation: past, present and future. Procedia Comput Sci 29:754–758 Google Scholar Zhang J (2019) Cognitive functions of the brain: perception, attention and memory. arXiv:1907.02863 Zhao G, Li Y, Xu Q (2022) From emotion AI to cognitive AI. Int J Netw Dyn Intell 1(1):65–72 Google Scholar Zhou F, Wu B, Li Z (2018) Deep meta-learning: learning to learn in the concept space. arXiv preprint. arXiv:1802.03596 Zhylin M, Hovorun T, Alizade B, Kovalenko AL (2025) The consciousness simulation gap: evaluating and benchmarking ai models through functional decomposition. J Theor Appl Inf Technol 103(10):4047–4048 Google Scholar Žiha K (2000) Paths to robustness. Mar Technol Zimmermann G (2024) What makes systems intelligent. Discov Psychol 4(1):127 Google Scholar Zmigrod L, Eisenberg IW, Bissett PG, Robbins TW, Poldrack RA (2021) The cognitive and perceptual correlates of ideological attitudes: a data-driven approach. Philos Trans R Soc B 376(1822):20200424 Google Scholar Download references Open access funding provided by Eötvös Loránd University. Open Access funding was provided by Eötvös Loránd University. ELTE Eötvös Loránd University, Pázmány Péter 1/C, Budapest, 1117, Hungary Attila Márton Putnoki & Tamás Orosz Search author on:PubMed Google Scholar Search author on:PubMed Google Scholar AMP wrote the main manuscript text and TO contributed and provided supervision. All authors reviewed the manuscript. Correspondence to Attila Márton Putnoki. The authors declare no conflict of interest. Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations. Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/. Reprints and permissions Putnoki, A.M., Orosz, T. Cognitive and artificial intelligence evaluation framework. Artif Intell Rev (2026). https://doi.org/10.1007/s10462-026-11493-x Download citation Published: 28 January 2026 DOI: https://doi.org/10.1007/s10462-026-11493-x Anyone you share the following link with will be able to read this content: Sorry, a shareable link is not currently available for this article. Provided by the Springer Nature SharedIt content-sharing initiative Advertisement 178.128.244.209 Not affiliated © 2026 Springer Nature
Images (1): 
|
|||||
| LimX Dynamics founder says embodied intelligence is just getting started, … | https://kr-asia.com/limx-dynamics-found… | 1 | Feb 08, 2026 08:00 | active | |
LimX Dynamics founder says embodied intelligence is just getting started, despite bubble concernsDescription: Founder Zhang Wei sees 2026 as the first year of real deployment, not a downturn, for humanoid robots. Content:
Written by Cheng Zi Published on 6 Feb 2026 14 mins read In tech, there was little ambiguity about 2025’s defining trend: embodied intelligence. Data from CVSource shows that 168 companies in the embodied intelligence sector secured funding in 2025, raising RMB 32.9 billion (USD 4.6 billion) in aggregate, a year-on-year increase of 291%. The financing boom continued into 2026. In January alone, nearly 20 new deals in China’s embodied intelligence sector were disclosed, and nine-figure RMB rounds became increasingly common. In 2025, embodied intelligence, framed as a future-facing field, was included in policy recommendations tied to China’s 15th five-year plan, which called for promoting embodied intelligence as a new driver of economic growth. More recently, the Ministry of Industry and Information Technology said it would use humanoid robots as a focal point to accelerate the broader sector’s development. Even so, doubts began to surface beneath the optimism. Talk of a “winter” or a market bubble started to circulate. Technical approaches had yet to converge. Commercial pathways remained difficult to close, and viable application scenarios were still hard to define. As valuations climbed, some observers began to predict a downturn. Others disagreed. “That’s definitely not the case,” Zhang Wei, founder of LimX Dynamics, told 36Kr. “I don’t think 2026 will be a winter [for the embodied intelligence sector] at all,” Zhang said. “We’ll see proof-of-concept validations across many segmented scenarios. They may not scale immediately, but by 2027, I believe they will. I’m very optimistic about that.” Among emerging players, LimX has stood out as an unusual contender. Earlier this year, during a research tour of Guangdong by Li Qiang, premier of China’s State Council, LimX was among the invited companies. Zhang demonstrated the company’s humanoid robot, Oli, climbing stairs, a straightforward on-site illustration of LimX’s work on real-time motion generation and its integrated cognitive-motor control framework. Less than two weeks later, LimX formally released the technology and named it Cosa, positioning it as an agent-native operating system designed for robots operating in the physical world. height="278" frameborder="0" allowfullscreen="allowfullscreen" data-ytbridge="vidSurrogate2"> One way to think about Cosa is as a humanoid robot’s nervous system. By fusing cognition with motion control, it is meant to help robots plan and execute actions in tandem. Zhang believes that 2026 will be the year humanoid robots begin taking on real-world use cases, with agent-native operating systems serving as a key enabler. In his view, the industry should shift from isolated model performance to system-level agent capabilities. Along that path, he said LimX has delivered an original breakthrough. Equally striking is Tron, the company’s multi-form embodied robot released last December. As the field grows crowded with increasingly similar designs, Tron aims to differentiate through a modular build. Developed on a single robotic base, it is designed to switch between dual-arm, bipedal, and wheeled-leg configurations, while also supporting reconfiguration into humanoid and quadruped forms. The idea is to push as much generality as possible into one platform. By lowering the cost and barrier to testing real-world deployment scenarios, LimX said Tron reduces the friction of experimentation. From Tron to Cosa, LimX presents itself as a company oriented around foundational bets, prioritizing new technical ground over iteration and price competition. After LimX’s recent completion of a Series B funding round totaling USD 200 million, 36Kr spoke with Zhang about how he views the company and the embodied intelligence sector. Unlike the founder archetype rooted primarily in academia, Zhang comes across as focused on how technology businesses operate in practice. He speaks readily about products, competition, and industry dynamics, often with optimism and humor. He also returns repeatedly to the idea that innovation and real-world impact are shared priorities across the LimX team. In the conversation, Zhang detailed LimX’s work in general-purpose robotics through Tron and Cosa, and its progress integrating cognition and motion. He also laid out two technical variables he believes will shape embodied manipulation in 2026: first-person video data and post-training. He weighed in on debates including whether 2026 will be a “winter” for embodied intelligence, whether headline-grabbing orders are sustainable, where moats can form, and what embodied robot companies should ultimately be building. The following transcript has been edited and consolidated for brevity and clarity. Zhang Wei (ZW): The name “Cosa” is actually short for “cognitive operating system for agents.” It’s an operating system built around agents and designed specifically for robots. It manages the models, skills, memory, and even emotional states within a robot, enabling it to actively reason and autonomously carry out tasks in the real world. Take, for example, the water fetching task we demonstrated with our humanoid robot Oli. After receiving the instruction, even if the robot is interrupted midway by a new task, it can autonomously judge priorities. After reasoning through the situation, it will first finish fetching water before moving on. This is made possible by the tight integration between high-level cognition and real-time motion execution. ZW: In 2026, the sector will shift from focusing on individual model capabilities to focusing on system-level embodied agent capabilities. This marks a transition from technology demos to product-driven user experiences, and we aim to take the lead by making that step. I believe future operating systems, including those for phones and computers, will all become agent-native. For humanoid robots, this is not optional. Their operating systems must be agent-native by design. Cosa was built specifically for humanoid robots. ZW: First, you need a foundational system capable of generating full-body motion in real time. I want to emphasize that this is a foundation, not a collection of pre-scripted movement policies. The robot must be able to generate arbitrary whole-body actions on the fly. That’s the cornerstone of everything else. Second, you need a higher-level skill layer that tightly integrates cognition and motion. This layer aligns navigation, obstacle avoidance, mobile manipulation, stair climbing, and other complex behaviors with the underlying real-time motion generation capability. It’s the bridge that allows cognitive intelligence to reach and affect the physical world. Third, you need an embodied agent architecture that is agent-native at its core. This architecture is responsible for designing, scheduling, integrating, and managing all models, skills, tools, memory, personality traits, and even emotional states, enabling true autonomous reasoning. ZW: Real-time motion refers to systems that can generate movement commands continuously as the robot operates. Most robots today perform actions like dancing or acrobatics using pre-programmed sequences or fixed strategies. They are like actors reciting memorized lines. If something interrupts them mid-performance, the whole sequence fails. Our approach is fundamentally different. The robot generates motion in real time. You can ask it to perform actions it has never explicitly trained for, and it can still execute them. This capability is essential if vision-language-action (VLA) models are ever going to work on humanoid robots. If the “brain” wants to grab a cup in a way it has never seen before, it cannot stop and retrain from scratch. It needs to be able to request an action, and the body must be able to execute it immediately. ZW: If you look at robots on the market today, they generally fall into a few categories: wheeled robots, bipedal bots, robotic arms, or quadruped robots. Tron represents a completely new category. You could think of it as a foundation robot. It can adapt to a wide range of scenarios. Do you need a single arm or two? Wheels, legs, or a hybrid? Tron serves as a general-purpose embodied platform. By swapping different end effectors and modules, you can assemble the form you need. After Tron was released, the reaction both in China and overseas was intense. It even sparked discussions about competitiveness between China and the US. Tron may be one of the very few robot categories defined by a Chinese company. Personally, I believe that if you need robots in multiple forms, a single Tron-style base can satisfy most of those needs. ZW: We were trying to solve a very practical problem: the cost of exploring real-world scenarios is extremely high. Right now, if you want to test different scenarios, you might need to buy a wheeled robot, a legged robot, and a robotic arm. That can easily cost hundreds of thousands of RMB. You test a scenario, find it doesn’t work, and the money is gone. The underlying idea is for one base to serve multiple forms. Want to test logistics? Install dual arms. Need to handle rough terrain? Switch to legs. Want speed? Add wheels. The forms change, but the core capabilities are reused. You don’t need to buy a completely new robot every time. And this isn’t just a demo machine. It has real payload capacity. It can do real work. Our hope is that Tron becomes the standard tool for scenario exploration, something you can take into real environments to validate whether a scenario works. ZW: We don’t obsess over form. We focus on how a problem should be solved. Right now, many robots look almost the same. Companies are competing on specifications and price. But if China wants to lead in embodied intelligence, it can’t just follow existing paths. Someone has to define something new. Tron came out of that thinking. We didn’t copy an existing category. We started from real needs and rethought what a robot should look like. The result is something genuinely different. Innovation isn’t about being different for its own sake. It’s about recognizing when old paths no longer work. If China wants leadership in this field, imitation and internal competition won’t get it there. ZW: We prioritize investors who can provide real support along the industrial chain and in concrete application scenarios. Going forward, we’ll work with Stone Venture to deploy robots in the Middle East and expand overseas markets. We’re also collaborating with Zhongding to build production lines and enhance manufacturing capacity. With long-term shareholders such as Alibaba, Lenovo, China Merchants Group, and SAIC Motor, we’ve been exploring proof-of-concept projects around embodied technology and real-world scenarios. ZW: Investors are gradually placing more emphasis on real-world deployment. Early on, they look at technology. Later, they care much more about commercial validation. That’s a good thing. From day one, we’ve positioned ourselves as a product-oriented company. We started with technological innovation, but our identity has always been product-driven. RELATED ARTICLENewsLimX Dynamics raises Series B funding to push embodied robots into real-world useWritten by Cheng Zi Written by Cheng Zi ZW: I think professors who become founders face significant disadvantages. The transition is substantial. Based on my experience, it involves several shifts in orientation, moving from academia to technology, then to engineering, product development, and finally commercialization. ZW: Academic orientation is about publishing papers and proposing new ideas. Technology orientation is about being proud of having cutting-edge or best-in-class technology. Engineering orientation focuses on making technology stable and reliable. Product orientation is about creating user value and building something people actually want to use. Commercialization orientation is about closing the loop and achieving sustainable profitability. In the early market, academic and technical advantages can still attract funding. But from the start, we positioned ourselves around products and commercialization. We pursue technologies with commercial value and deployment potential. That’s why we built the Tron series and invested heavily in integrating cognition and motion. ZW: High valuations are a good thing. It means the market is big. We also have tremendous value ourselves. The pressure doesn’t come from peers. It comes from our own urgency to solve real user needs. There are still too many problems in embodied intelligence that haven’t been solved. Deployment hasn’t happened at scale. This isn’t a market where everything is already in place and companies are just competing on price. The opportunities are large, and everyone is still figuring things out. Crowding around the same ideas won’t get you anywhere. ZW: We care more about what’s behind the orders. Have the scenarios been validated? Are customers actually using the robots? Can repeat purchases happen? Those things matter more than headline numbers. Signing a framework agreement is easy, but that’s just the start. We do have solid orders ourselves, but we haven’t talked about them much publicly. ZW: It’s not that we’re avoiding it. We just think our time is better spent focusing on products and scenario validation. These are early days, and most players are still experimenting. We want to do our own work well first. ZW: Not at all. If you can’t raise money with just a deck anymore, that’s not a winter. That’s a return to normal. Projects that never should have been funded are no longer getting funded. That suggests the market is becoming more rational. For teams doing real work, this is positive. I’m optimistic. I don’t think 2026 will be a winter at all. I think it will be the first year of embodied intelligence deployment. We’ll see proof-of-concept validations across many segmented scenarios. They may not scale immediately, but by 2027, I believe they will. ZW: There are several layers. First is technology, though I don’t like starting from a purely technical perspective. Think about smartphones. Is the moat really that no one else can build the technology? Ultimately, the moat is product competitiveness: how much value you deliver to users, your scale in the market, and the size of your user base. Those are the real barriers. In embodied intelligence, early on people tend to anchor moats in technology, whether it’s cognition or motion. But it has to land in products and business. At the technical level, our advantages are threefold. First, our real-time motion generation capabilities, especially in full-size humanoid robots, are relatively advanced. Second, building on that, we’ve accumulated experience and made progress integrating cognition with motion. Third, we have in-house hardware design and manufacturing capabilities. This full-stack capability lets us move faster toward productization and deployment, rather than stopping at demos. More importantly, it’s our product choices and positioning. LimX’s bipedal humanoid robots will not go into factories. If customers want to deploy them in factories, we’ll support that, but we won’t pursue it ourselves. We serve people, not production processes. We target commercial scenarios first, and eventually households. We focus on helping people and augmenting human capabilities. That strategic choice defines everything we do. ZW: Embodied intelligence and humanoid robots are huge concepts with broad deployment possibilities. What we’re building are general-purpose robots. For any single scenario or task, you don’t need a humanoid robot. In logistics or elsewhere, you can often find a more efficient specialized solution. Specialized robots rely on deep hardware-software integration to maximize efficiency in a specific scenario. General-purpose robots follow different logic, and there are two forms of “generality.” One is general hardware plus software applications, similar to the smartphone model. You don’t change the hardware, you expand functionality through software. A single body plus one application may not seem cost-effective. But when you add two, three, or five applications, you reach an inflection point, and capabilities start to compound. That’s the logic behind Cosa. It’s an operating system with memory, cognition, perception, and skill orchestration. It differs from a traditional computer OS. A computer OS manages hardware resources for computing needs. A robot OS manages everything from limbs to motors to produce motion that changes the physical world. It needs dialogue, language, interaction, and multiple agents. Ultimately, it becomes agent-native. The second form of generality is a universal base that can be recombined and adapted for different task scenarios while maintaining efficiency. That’s the premise behind Tron. For example, in logistics sorting, you can configure Tron with dual arms. Over time, a general base capability accumulates across many scenarios. If you walk through the World Robot Conference, you’ll see countless robots of all shapes and sizes, many of which feel similar. Tron offers a different possibility. It suggests robots don’t have to look the way they do today. From that perspective, Tron has historical significance. Years from now, when people look back, I believe Tron will be one of the robots remembered by its era. ZW: 2026 will be the first year when embodied intelligence begins serving real-world scenarios. Technically, there are two major variables. The first is video-based learning. We started focusing on learning generalizable manipulation capabilities from video data in 2024. In early 2025, we released VGM. Teleoperated real robot data is inefficient and cannot scale. That’s why the field has returned to video data, especially first-person video. I often describe data as “ore” and intelligence as “gold.” Data is everywhere. What matters is whether you can refine it. Training directly on real robot data is the most primitive form of refinement. The second variable is reinforcement learning. VLA models are nearing the end of their pre-training phase for embodied intelligence. The field is entering the post-training era. Post-training is similar to RLHF (reinforcement learning from human feedback) for large language models, but in embodied intelligence it is even more important. Pre-training data in this field is scarce. Once a model has basic generalization capabilities, it must enter real-world scenarios quickly, collect data continuously, and improve through real-world reinforcement learning. The goal is to form a flywheel between foundation models and scenario data. You can’t wait until everything is perfect. The flywheel has to start in real environments. ZW: Culture and values, not money alone. Market compensation is rising, and you have to meet reasonable standards. But many people care more about what they can learn here, what they can build, and whether they can do something meaningful. People care about technical challenges, room to grow, and real accomplishment. Money is the baseline. What matters more is the technical environment, learning opportunities, and the chance to build something together. Competing purely on compensation is a primitive approach. I still have work to do here, and this year we’ll focus heavily on building culture. ZW: Reliability, intelligence, ambition, and a desire to grow. Curiosity and openness are also essential. Otherwise, past experience can become a liability for a startup rather than an asset. ZW: In embodied intelligence, the US doesn’t have an advantage. The path from concept to deployment is long. It involves product design, mass production, manufacturing, users, and markets. China moves faster across that chain. Pure artificial intelligence without hardware may still favor the US. But anything involving hardware, China will move faster. ZW: For humanoid robots, the goal is to remove the remote controller and validate product-market fit in several scenarios. We’ll launch new products and build a distinctive product matrix. On the technical side, agent-native operating systems are the priority. We want Tron to become the general-purpose base for embodied intelligence research and deployment, something like what Nvidia’s computing platform is to AI. KrASIA Connection features translated and adapted content that was originally published by 36Kr. This article was written by Xiao Xi for 36Kr. Loading... Subscribe to our newsletters KrASIA A digital media company reporting on China's tech and business pulse.
Images (1): 
|
|||||
| China’s Unitree Robotics unveils latest humanoid ahead of US$7 billion … | https://biztoc.com/x/22f7dab0fb155321?r… | 0 | Feb 08, 2026 00:03 | active | |
China’s Unitree Robotics unveils latest humanoid ahead of US$7 billion IPOURL: https://biztoc.com/x/22f7dab0fb155321?ref=ff Description: Unitree Robotics has teased a new humanoid model in a short video on its social media channels, its most humanlike model to date. In the video, the H2 model… Content: |
|||||
| China’s Unitree plans $7 billion IPO valuation, Reuters reports, as … | https://biztoc.com/x/54f41e7e13665f67?r… | 0 | Feb 08, 2026 00:03 | active | |
China’s Unitree plans $7 billion IPO valuation, Reuters reports, as humanoid robot race heats upURL: https://biztoc.com/x/54f41e7e13665f67?ref=ff Description: Unitree Robotics, one of China's hottest technology startups, is planning an initial public offering that could value the company at up to 50 billion yuan ($7?... Content: |
|||||
| Humanoid Robots Still Lack AI Technology, Unitree CEO Says | https://www.bloomberg.com/news/articles… | 0 | Feb 08, 2026 00:03 | active | |
Humanoid Robots Still Lack AI Technology, Unitree CEO SaysDescription: Artificial intelligence technology to get humanoid robots into the mainstream remains a key challenge for the sector, according to the founder of one of China?... Content: |
|||||
| Unitree unveils H2 humanoid robot with lifelike dance and combat … | https://interestingengineering.com/inno… | 1 | Feb 08, 2026 00:03 | active | |
Unitree unveils H2 humanoid robot with lifelike dance and combat movesURL: https://interestingengineering.com/innovation/china-new-humanoid-robot-unitree-h2 Description: A Chinese robotics company has unveiled a humanoid robot that dances, kickboxes and walks a runway with lifelike precision. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Access expert insights, exclusive content, and a deeper dive into engineering and innovation. Engineering-inspired textiles, mugs, hats, and thoughtful gifts We connect top engineering talent with the world's most innovative companies. We empower professionals with advanced engineering and tech education to grow careers. We recognize outstanding achievements in engineering, innovation, and technology. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation. Engineering-inspired textiles, mugs, hats, and thoughtful gifts We connect top engineering talent with the world's most innovative companies We empower professionals with advanced engineering and tech education to grow careers. We recognize outstanding achievements in engineering, innovation, and technology. All Rights Reserved, IE Media, Inc. The clip shows the H2 robot moving with striking human precision. A Chinese robotics company has just released a social media video showcasing it’s brand new humanoid robot that can dance, kickbox and even walk a fashion runway with smooth, humanlike motion. Hangzhou-based Unitree Robotics, which is often described as China’s answer to Boston Dynamics, introduced its latest creation, the Unitree H2, a next-generation bipedal humanoid robot in a short promotional video on October 20. Standing about 5.9 feet [180 centimeters] tall and weighing 154 lbs [70 kilograms] H2 is the tallest and most advanced humanoid the robotics technology company has developed so far. The extraordinary footage, which Unitree Robotics shared on the its social media channels depicts the humanoid bot carrying out a series of complex movements, including pirouettes, dance routines, as well as incredible kickboxing skills. In the video, the H2 can be seen twirling gracefully through ballet-inspired spins, including perfectly executed pirouettes and arabesques, before throwing precise kickboxing punches. Then after boasting its impressive joint flexibility through some well-coordinated kickboxing maneuvers, another scene captures the H2 confidently walking beside a human model on a catwalk, for comparison. The pioneering humanoid robot also features a stylized human face, modeled in silver. It also has defined eyes, lips and a nose, which gives it an appearance that closely mimics real human expressions. “Welcome to this world – standing 180 centimeters [5.9 feet] tall and weighing 70 kilograms [154 lbs],” the company revealed. “The H2 bionic humanoid – born to serve everyone safely and friendly.” The robot builds on the success of its predecessor, the H1, which made headlines during China’s 2024 Spring Festival Gala for its remarkable sprinting abilities. The earlier model could reach speeds of up to 10.8 feet per second (3.3 meters per second), with a theoretical top speed exceeding 16.4 feet per second (roughly five meters per second). The H1, which is equipped with 3D LiDAR and depth cameras, showed remarkable spatial awareness and balance on uneven terrain. It took home two gold medals at the 2025 World Humanoid Robot Games in Beijing, after dominating both the 400-meter and 1,500-meter running events. The company, which was founded in 2016, gained international attention that same year with its revolutionary XDog quadruped. Since then, it has broadened its lineup of agile robots and emerged as one of the East Asian nation’s leading names in humanoid development. Now, its latest model, which features 31 degrees of freedom, combines aesthetic design with practical performance. Its improved flexibility, joint control, and mechanical balance enable it to mimic human movement more closely than ever before. It is the company’s fourth humanoid robot after the H1, G1 and R1. “Our biggest goal, and current focus, is to make robots work,” Unitree Robotics CEO Wang Xingxing and one the top developers of quadrupedal and humanoid robots in China, told the Global Times. A post shared by Interesting Engineering (@interestingengineering) “They can perform various actions and assist humans, but mass adoption of the robots in homes or factories isn’t feasible due to technical limitations,” he added. “Step-by-step progress is good, fostering more understanding and tolerance for the industry. The firm is preparing to file for an initial public offering (IPO) in mainland China, aiming for a valuation of around USD 7 billion (CNY 50 billion). Its growing visibility highlights the country’s push to lead the global humanoid robotics field, which was once dominated by the US and Japan. Based in Skopje, North Macedonia. Her work has appeared in Daily Mail, Mirror, Daily Star, Yahoo, NationalWorld, Newsweek, Press Gazette and others. She covers stories on batteries, wind energy, sustainable shipping and new discoveries. When she's not chasing the next big science story, she's traveling, exploring new cultures, or enjoying good food with even better wine. Premium Follow
Images (1): 
|
|||||
| Unitree Ranks No.1 Globally in Humanoid Robot Shipments, Exceeding 5,500 … | https://www.manilatimes.net/2026/01/30/… | 0 | Feb 08, 2026 00:03 | active | |
Unitree Ranks No.1 Globally in Humanoid Robot Shipments, Exceeding 5,500 Units in 2025Description: HANGZHOU, China, Jan. 30, 2026 /PRNewswire/ -- Unitree Robotics, a global leader in general-purpose robotics development, issued an official clarification rega... Content: |
|||||
| Unitree Ranks No.1 Globally in Humanoid Robot Shipments, Exceeding 5,500 … | https://bubblear.com/unitree-ranks-no-1… | 1 | Feb 08, 2026 00:03 | active | |
Unitree Ranks No.1 Globally in Humanoid Robot Shipments, Exceeding 5,500 Units in 2025 – The BubbleContent:
HANGZHOU, China, Jan. 29, 2026 /PRNewswire/ — Unitree Robotics, a global leader in general-purpose robotics development, issued an official clarification regarding its 2025 sales and shipment figures on January 22, 2026, in response to misinformation circulating online. The company’s full statement is as follows: Clarification Regarding Unitree’s 2025 Sales Data 1. Over the past month, many pieces of misinformation regarding our company’s 2025 shipment volume have been circulating online. Unitree has never previously disclosed any sales data of 2025 externally. We appreciate everyone’s attention.2. In 2025, Unitree’s actual shipment volume of humanoid robots exceeded 5,500 units (referring to the quantity actually sold and delivered to end customers, not order volume; the order volume is higher). The total mass-production output of 2025 exceeded 6,500 units.3. The aforementioned figures consist solely of our pure humanoid robots and do not include our dual-arm wheeled robots or any other robots.4. Currently, given the diversity of robotic forms, we suggest not to directly combine the numbers of different types of robots together for comparison. January 22, 2026 About Unitree Robotics Unitree Robotics is a world-renowned civilian robotics company, which is focusing on the R&D, production, and sales of consumer and industry-class high-performance general-purpose legged and humanoid robots, six-axis manipulators, and so on. View original content:https://www.prnewswire.com/news-releases/unitree-ranks-no1-globally-in-humanoid-robot-shipments-exceeding-5-500-units-in-2025–302674729.html SOURCE Unitree Robotics Disclaimer: The above press release comes to you under an arrangement with PR Newswire. Bubblear.com takes no editorial responsibility for the same. © 2026 - The Bubble. All Rights Reserved.
Images (1): 
|
|||||
| ChatGPT sucks at being a real robot | Vox | https://www.vox.com/technology/476657/c… | 1 | Feb 07, 2026 16:01 | active | |
ChatGPT sucks at being a real robot | VoxURL: https://www.vox.com/technology/476657/chatgpt-mit-csail-tesla-humanoid-robot Description: Science fiction promised us humanoids with AI brains. Do we even want them? Content:
When news breaks, you need to understand what actually matters. At Vox, our mission is to help you make sense of the world — and that work has never been more vital. But we can’t do it on our own. We rely on readers like you to fund our journalism. Will you support our work and become a Vox Member today? Science fiction promised us humanoids. Do we even want them? There’s something sad about seeing a humanoid robot lying on the floor. Without any electricity, these bipedal machines can’t stand up, so if they’re powered down and not hanging from a winch, they’re sprawled out on the floor, staring up at you, helpless. That’s how I met Atlas a couple of months ago. I’d seen the robot on YouTube a hundred times, running obstacle courses and doing backflips. Then I saw it on the floor of a lab at MIT. It was just lying there. The contrast is jarring, if only because humanoid robots have become so much more capable and ubiquitous since Atlas got famous on YouTube. Across town at Boston Dynamics, the company that makes Atlas, a newer version of the humanoid robot had learned not only to walk but also to drop things and pick them back up instinctively, thanks to a single artificial intelligence model that controls its movement. Some of these next-generation Atlas robots will soon be working on factory floors — and may venture further. Thanks in part to AI, general-purpose humanoids of all types seem inevitable. “In Shenzhen, you can already see them walking down the street every once in a while,” Russ Tedrake told me back at MIT. “You’ll start seeing them in your life in places that are probably dull, dirty, and dangerous.” Tedrake runs the Robot Locomotion Group at the MIT Computer Science and Artificial Intelligence Lab, also known as CSAIL, and he co-led the project that produced the latest AI-powered Atlas. Walking was once the hard thing for robots to learn, but not anymore. Tedrake’s group has shifted focus from teaching robots how to move to helping them understand and interact with the world through software, namely AI. They’re not the only ones. A weekly dispatch to make sure tech is working for you, instead of overwhelming you. From senior technology correspondent Adam Clark Estes. In the United States, venture capital investment in robotics startups grew from $42.6 million in 2020 to nearly $2.8 billion in 2025. Morgan Stanley predicts the cumulative global sales of humanoids will reach 900,000 in 2030 and explode to more than 1 billion by 2050, the vast majority of which will be for industrial and commercial purposes. Some believe these robots will ultimately replace human labor, ushering in a new global economic order. After all, we designed the world for humans, so humanoids should be able to navigate it with ease and do what we do. They won’t all be factory workers, if certain startups get their way. A company called X1 Technologies has started taking preorders for its $20,000 home robot, Neo, which wears clothes, does dishes, and fetches snacks from the fridge. Figure AI introduced its Figure 03 humanoid robot, which also does chores. Sunday Robotics said it would have fully autonomous robots making coffee in beta testers’ homes next year. So far, we’ve seen a lot of demos of these AI-powered home robots and promises from the industrial humanoid makers, but not much in the way of a new global economic order. Demos of home robots, like the X1 Neo, have relied on human operators, making these automatons, in practice, more like puppets. Reports suggest that Figure AI and Apptronik have only one or two robots on manufacturing floors at any given time, usually doing menial tasks. That’s a proof of concept, not a threat to the human work force. “In order to make them better, we have to make AI better.” You can think of all these robots as the physical embodiment of AI, or just embodied AI. This is what happens when you put AI into a physical system, enabling it to interact with the real world. Whether that’s in the form of a humanoid robot or an autonomous car, it’s the next frontier for hardware and, arguably, technological progress writ large. Embodied AI is already transforming how farming works, how we move goods around the world, and what’s possible in surgical theaters. We might be just one or two breakthroughs away from walking, talking, thinking machines that can work alongside us, unlocking a whole new realm of possibilities. “Might” is the key word there. “If we’re looking for robots that will work side by side with us in the next couple of years, I don’t think it will be humanoids,” Daniela Rus, director of CSAIL, told me not long after I left Tedrake’s lab. “Humanoids are really complicated, and we have to make them better. And in order to make them better, we have to make AI better.” So to understand the gap between the hype around humanoids and the technology’s real promise, you have to know what AI can and can’t do for robots. You also, unfortunately, have to try to understand what Elon Musk has been up to at Tesla for the past five years. It’s still embarrassing to watch the part of the Tesla AI Day presentation in 2021 when a human person dressed in a robot costume appears on stage dancing to dubstep music. Musk eventually stops the dance and announces that Tesla, “a robotics company,” will have a prototype of a general-purpose humanoid robot, now known as Optimus, the following year. Not many people believed him, and now, years later, Tesla still has not delivered a fully functional Optimus. Never afraid to make a prediction, Musk told audiences at Davos in January 2026 that Tesla’s robot will go on sale next year. “People took him seriously because he had a great track record,” said Ken Goldberg, a roboticist at the University of California-Berkeley and co-founder of Ambi Robotics. “I think people were inspired by that.” You can imagine why people got excited, though. With the Optimus robot, Elon Musk promised to eliminate poverty and offer shareholders “infinite” profits. He said engineers could effectively translate Tesla’s self-driving car technology into software that could power autonomous robots that could work in factories or help around the house. It’s a version of the same vision humanoid robotics startups are chasing today, albeit colored by several years of Musk’s unfulfilled promises. We now know that Optimus struggles with a lot of the same problems as other attempts at general-purpose humanoids. It often requires humans to remotely operate it, and it struggles with dexterity and precision. The 1X Neo, likewise, needed a human’s help to open a refrigerator door and collapsed onto the floor in a demo for a New York Times journalist last year. The hardware seems capable enough. Optimus can dance, and Neo can fold clothes, albeit a bit clumsily. But they don’t yet understand physics. They don’t know how to plan or to improvise. They certainly can’t think. “People in general get too excited by the idea of the robot and not the reality.” “People in general get too excited by the idea of the robot and not the reality,” said Rodney Brooks, co-founder of iRobot, makers of the Roomba robot vacuum. Brooks, a former CSAIL director, has written extensively and skeptically about humanoid robots. Clearly, there’s a gap between what’s happening in research labs and what’s being deployed in the real world. Some of the optimism around humanoids is based on good science, though. In 2023, Tedrake coauthored a landmark paper with Tony Zhao, co-founder and CEO of Sunday Robotics, that outlined a novel method for training robots to move like humans. It involves humans performing the task wearing sensor-laden gloves that send data to an AI model that enables the robot to figure out how to do those tasks. This complemented work Tedrake was doing at the Toyota Research Institute that used the same kinds of methods AI models use to generate images to generate robot behavior. You’ve heard of large language models, or LLMs. Tedrake calls these large behavior models, or LBMs. It makes sense. By watching humans do things over and over, these AI models collect enough data to generate new behaviors that can adapt to changing environments. Folding laundry, for example, is a popular example of a task that requires nimble hands and better brains. If a robot picks up a shirt and the fabric flops down in an unexpected way, it needs to figure out how to handle that uncertainty. You can’t simply program it to know what to do when there are so many variables. You can, however, teach it to learn. That’s what makes the lemonade demo so impressive. Some of Rus’s students at CSAIL have been teaching a humanoid robot named Ruby to make lemonade — something that you might want a robot butler to do one day — by wearing sensors that measure not only the movements but the forces involved. It’s a combination of delicate movements, like pouring sugar, and strong ones, like lifting a jug of water. I watched Ruby do this without spilling a drop. It hadn’t been programmed to make lemonade. It had learned. The real challenge is getting this method to scale. One way is simply to brute-force it: Employ thousands of humans to perform basic tasks, like folding laundry, to build foundation models for the physical world. Foundation models are the massive datasets that can be adapted to specific tasks like generating text, images, or in this case, robot behavior. You can also get humans to teleoperate countless robots in order to train these models. These so-called arm farms already exist in warehouses in Eastern Europe, and they’re about as dystopian as they sound. Another option is YouTube. There are a lot of how-to videos on YouTube, and some researchers think that feeding them all into an AI model will provide enough data to give robots a better understanding of how the world works. These two-dimensional videos are obviously limited, if only because they can’t tell us anything about the physics of the objects in the frame. The same goes for synthetic data, which involves a computer rapidly and repeatedly carrying out a task in a simulation. The upside here, of course, is more data, more quickly. The downside is that the data isn’t as good, especially when it comes to physical forces like friction and torque, which also happen to be the most important for robot dexterity. “Physics is a tough task to master,” Brooks said. “And if you have a robot, which is not good with physics, in the presence of people, it doesn’t end well.” That’s not even taking into account the many other bottlenecks facing robotics right now. While components have gotten cheaper — you can buy a humanoid robot right now for less than $6,000, compared to the $75,000 it cost to buy Boston Dynamics’ small, four-legged robot Spot five years ago — batteries represent a major bottleneck for robotics, limiting the run time of most humanoids to two to four hours. Then you have the problem with processing power. The AI models that can make humanoids more human require massive amounts of compute. If that’s done in the cloud, you’ve got latency issues, preventing the robot from reacting in real time. And inevitably, to tie a lot of other constraints into a tidy bundle, the AI is just not good enough. If you trace the history of AI and the history of robotics back to their origins, you’ll see a braided line. The two technologies have intersected time and again, since the birth of the term “artificial intelligence” at a Dartmouth summer research workshop in the summer of 1956. Then, half a century later, things started heating up on the AI front, when advances in machine learning and powerful processors called GPUs — the things that have now made Nvidia a $5 trillion company — ushered in the era of deep learning. I’m about to throw a few technical terms at you, so bear with me. Machine learning is a type of AI. It’s when algorithms look for patterns in data and make decisions without being explicitly trained to do so. Deep learning takes it to another level with the help of a machine learning model called a neural network. You can think of a neural network, a concept that’s even older than AI, as a system loosely modeled on the human brain that’s made up of lots of artificial neurons that do math problems. Deep learning uses multilayered neural networks to learn from huge data sets and to make decisions and predictions. Among other accomplishments, neural networks have revolutionized computer vision to improve perception in robots. There are different architectures for neural networks that can do different things, like recognize images or generate text. One is called a transformer. The “GPT” in ChatGPT stands for “generative pre-trained transformer,” which is a type of large language model, or LLM, that powers many generative AI chatbots. While you’d think LLMs would be good at making robots think, they really aren’t. Then there are diffusion models, which are often used for image generation and, more recently, making robots appear to think. The framework that Tedrake and his coauthors described in their 2023 research into using generative AI to train robots is based on diffusion. “Under the hood, what’s actually going on should be something much more like our own brains.” Three things stand out in this very limited explanation of how AI and robots get along. One is that deep learning requires a massive amount of processing power and, as a result, a huge amount of energy. The other is that the latest AI models work with the help of stacks of neural networks whose millions or even billions of artificial neurons do their magic in mysterious and usually inefficient ways. The third thing is that, while LLMs are good at language, and diffusion models are good at images, we don’t have any models that are good enough at physics to send a 200-pound robot marching into a crowd to shake hands and make friends. As Josh Tenenbaum, a computational cognitive scientist at MIT, explained to me recently, an LLM can make it easier to talk to a robot, but it’s hardly capable of being the robot’s brains. “You could imagine a system where there’s a language model, there’s a chatbot, you want to talk to your robot,” Tenenbaum said. “Under the hood, what’s actually going on should be something much more like our own brains and minds or other animals, not just humans in terms of how it’s embodied and deals with the world.” So we need better AI for robots, if not in general. Scientists at CSAIL have been working on a couple of physics-inspired and brain-like technologies they’re calling liquid neural networks and linear optical networks. They both fall into the category of state-space models, which are emerging as an alternative or rival to transformer-based models. Whereas transformer-based models look at all available data to identify what’s important, state-space models are much more efficient, as they maintain a summary of the world that gets updated as new data comes in. It’s closer to how the human brain works. To be perfectly honest, I’d never heard of state-space models until Rus, the CSAIL director, told me about them when we chatted in her office a few weeks ago. She pulled up a video to illustrate the difference between a liquid neural network and a traditional model used for self-driving cars. In it, you can see how the traditional model focuses its attention on everything but the road, while the newer state-space model only looks at the road. If I’m riding in that car, by the way, I want the AI that’s watching the road. “And instead of a hundred thousand neurons,” Rus says, referring to the traditional neural network, “I have only 19.” And here’s where it gets really compelling. She added, “And because I have only 19, I can actually figure out how these neurons fire and what the correlation is between these neurons and the action of the car.” You may have already heard that we don’t really know how AI works. If newer approaches bring us a little bit closer to comprehension, it certainly seems worth taking them seriously, especially if we’re talking about the kinds of brains we’ll put in humanoid robots. When a humanoid robot loses power, when electricity stops flowing to the motors that keep it upright, it collapses into a heap of heavy metal parts. This can happen for any number of reasons. Maybe it’s a bug in the code or a lost wifi connection. And when they’re on, humanoids are full of energy as their joints fight gravity or stand ready to bend. If you imagine being on the wrong side of that incredible mechanical power, it’s easy to doubt this technology. Some companies that make humanoid robots also admit that they’re not very useful yet. They’re too unreliable to help out around the house, and they’re not efficient enough to be helpful in factories. Furthermore, most of the money being spent developing robots is being spent on making them safe around people. When it comes to deploying robots that can contribute to productivity, that can participate in the economy, it makes a lot more sense to make them highly specialized and not human-shaped. “Let’s not do open heart surgery right away with these things.” The embodied AI that will transform the world in the near future is what’s already out there. In fact, it’s what’s been out there for years. Early self-driving cars date back to the 1980s, when Ernst Dickmanns put a vision-guided Mercedes van on the streets of Munich. Researchers from Carnegie Mellon University got a minivan to drive itself across the United States in 1995. Now, decades later, Waymo is operating its robotaxi service in a half-dozen American cities, and the company says its AI-powered cars actually make the roads safer for everyone. Then there are the Roombas of the world, the robots that are designed to do one thing and keep getting better at it. You can include the vast array of increasingly intelligent manufacturing and warehouse robots in this camp too. By 2027, the year Elon Musk is on track to miss his deadline to start selling Optimus humanoids to the public, Amazon will reportedly replace more than 600,000 jobs with robots. These would probably be boring robots, but they’re safe and effective. Science fiction promised us humanoids, however. Pick an era in human history, in fact, and someone was dreaming about an automaton that could move like us, talk like us, and do all our dirty work. Replicants, androids, the Mechanical Turk — all these humanoid fantasies imagined an intelligent synthetic self. Reality gave us package-toting platforms on wheels roving around Amazon warehouses or the sensor-heavy self-driving cars clogging San Francisco streets. In time, even the skeptics think that humanoids will be possible. Probably not in five years, but maybe in 50, we’ll get artificially intelligent companions who can walk alongside us. They’ll take baby steps. “Good robots are going to be clumsy at first, and you have to find applications where it’s okay for the robot to make mistakes and then recover,” Tedrake said. “Let’s not do open-heart surgery right away with these things. This is more like folding laundry.” Understand the world with a daily explainer, plus the most compelling stories of the day. This is the title for the native ad Are the new owners censoring you, or are they just bad at running the app? ChatGPT is boring compared to what comes next. Don’t be afraid of your bad posts. AI agents populated their own social network. Then they started a religion. 2016 really wasn’t that great. Why are we so nostalgic for it? President Trump helped create a US version of the app, which now appears to be censoring people. This is the title for the native ad © 2026 Vox Media, LLC. All Rights Reserved
Images (1): 
|
|||||
| Robots Talking To Robots | Hackaday | https://hackaday.com/2026/02/07/robots-… | 1 | Feb 07, 2026 16:01 | active | |
Robots Talking To Robots | HackadayURL: https://hackaday.com/2026/02/07/robots-talking-to-robots/ Description: Although there are a few robots on the market that can make life a bit easier, plenty of them have closed-source software or smartphone apps required for control that may phone home and send any am… Content:
Although there are a few robots on the market that can make life a bit easier, plenty of them have closed-source software or smartphone apps required for control that may phone home and send any amount of data from the user’s LAN back to some unknown server. Many people will block off Internet access for these types of devices, if they buy them at all, but that can restrict the abilities of the robots in some situations. [Max]’s robot vacuum has this problem, but he was able to keep it offline while retaining its functionality by using an interesting approach. Home Assistant, a popular open source home automation system, has a few options for voice commands, and can also be set up to transmit voice commands as well. This robotic vacuum can accept voice commands in lieu of commands from its proprietary smartphone app, so to bypass this [Max] set up a system of automations in Home Assistant that would command the robot over voice. His software is called jacadi and is built in Go, which uses text-to-speech to command the vacuum using a USB speaker, keeping it usable while still offline. Integrating a voice-controlled appliance like this robotic vacuum cleaner allows things like scheduled cleanings and other commands to be sent to the vacuum even when [Max] isn’t home. There are still a few limitations though, largely that communication is only one way to the vacuum and the Home Assistant server can’t know when it’s finished or exactly when to send new commands to the device. But it’s still an excellent way to keep something like this offline without having to rewrite its control software entirely. Please be kind and respectful to help make the comments section excellent. (Comment Policy) This site uses Akismet to reduce spam. Learn how your comment data is processed.
Images (1): 
|
|||||
| Vivo Vision Mixed Reality Headset Unveiled China; Bears Striking Resemblance … | https://www.gadgets360.com/wearables/ne… | 0 | Feb 07, 2026 08:00 | active | |
Vivo Vision Mixed Reality Headset Unveiled China; Bears Striking Resemblance to Apple Vision ProURL: https://www.gadgets360.com/wearables/news/vivo-vision-heaset-mixed-reality-unveiled-china-8008754 Description: Vivo Vision was unveiled by the company at the Boao Forum for Asia 2025 in China as a new mixed reality headset. Bearing a striking resemblance to the Apple Vis... Content: |
|||||
| ASUS IoT Introduces PE1000U Rugged Fanless DIN-Rail Industrial PC for … | https://www.manilatimes.net/2026/02/06/… | 0 | Feb 07, 2026 08:00 | active | |
ASUS IoT Introduces PE1000U Rugged Fanless DIN-Rail Industrial PC for AMR, Robotics, and Computer VisionDescription: **media[927714]** Compact edge computer features an Intel Core Ultra Series 2 processor and extensive I/O connectivity Content: |
|||||
| Contributions to Safe Reinforcement Learning and Degradation Tolerant Control Design … | https://hal.univ-lorraine.fr/tel-050104… | 1 | Feb 07, 2026 00:01 | active | |
Contributions to Safe Reinforcement Learning and Degradation Tolerant Control Design - Université de LorraineURL: https://hal.univ-lorraine.fr/tel-05010498v1 Description: Safety-critical dynamical systems are essential in various industries, such as aerospace domain, autonomous systems, robots in healthcare area etc. where safety issues and structural or functional failure may lead to catastrophic consequences. A significant challenge in these systems is the degradation of components and actuators, which can compromise safety and stability of systems. As such, incorporating state of system's health within the control design framework is essential to ensure tolerance to functional degradation. Moreover, such system models often involve uncertainties and incomplete knowledge, especially as components degrade, altering system dynamics in a nonlinear manner, calling for development of learning approaches that envisage assimilation of available data within the control learning paradigm. However, assuring safety during the learning phase (exploration) as well as operational phase (exploitation) is of paramount importance when it comes to such dynamical systems. Traditional model-based control approaches, require precise system models, making them less effective under these conditions. In this context, Reinforcement Learning (RL) emerges as a powerful approach, capable of learning optimal control laws for partially or fully unknown dynamic systems, in the presence of input-output data (without the exact knowledge of system models). However, development and implementation of RL based approaches present their own challenges: the exploration phase, necessary for learning, can lead the system into unsafe regions and accelerate the speed of degradation; further, provable safety guarantees during the operational (exploitation) phase are equally important to ensure safety throughout the system operation. In this context, Safe Reinforcement Learning (Safe RL) paradigm targets development of RL based approaches that prioritize the safety guarantees, along with traditional stability, and optimality of systems. This thesis addresses these challenges by developing novel control learning strategies that adapt to system uncertainties and functional degradation. The main contributions of this thesis lie in proposition of novel approaches to addressing the challenges of system safety and stability, as well as decelerating the speed of degradation, thereby advancing the fields of safe RL and leading to proposition of Degradation-Tolerant Control (DTC). These contributions include:• ensuring the optimality, safety, and stability of control policy during both exploration and exploitation phases of RL. By integrating Control Barrier Functions (CBFs) and Control Lyapunov Functions (CLFs) within the RL framework, safe exploration and stable operation are ensured for both regulation and tracking problems. CBFs are used to define safe operating regions, while CLFs ensure that the system remains stable. These functions are incorporated into the RL algorithms to guide the learning process, ensuring that safety and stability constraints are respected;• decelerating the speed of degradation by incorporating degradation rates into control design, initially employing an optimal control approach in discrete time for linear systems. This ensures that control actions minimize the speed of degradation on system components, thereby extending their lifespan. For nonlinear systems, RL methods are employed to address the problem in both discrete and continuous time, providing adaptable solutions to complex dynamics;• proposal of a novel cyclic RL algorithm to ensure system stability under actuator degradation. This algorithm cyclically updates the learned control law, ensuring proper adaptation as system components degrade. The cyclic nature of the algorithm allows for reassessment and adjustment of control policies, ensuring continuous optimal performance despite ongoing degradation. These developed approaches were implemented through simulations, demonstrating their effectiveness in academic applications. Content:
Safety-critical dynamical systems are essential in various industries, such as aerospace domain, autonomous systems, robots in healthcare area etc. where safety issues and structural or functional failure may lead to catastrophic consequences. A significant challenge in these systems is the degradation of components and actuators, which can compromise safety and stability of systems. As such, incorporating state of system's health within the control design framework is essential to ensure tolerance to functional degradation. Moreover, such system models often involve uncertainties and incomplete knowledge, especially as components degrade, altering system dynamics in a nonlinear manner, calling for development of learning approaches that envisage assimilation of available data within the control learning paradigm. However, assuring safety during the learning phase (exploration) as well as operational phase (exploitation) is of paramount importance when it comes to such dynamical systems. Traditional model-based control approaches, require precise system models, making them less effective under these conditions. In this context, Reinforcement Learning (RL) emerges as a powerful approach, capable of learning optimal control laws for partially or fully unknown dynamic systems, in the presence of input-output data (without the exact knowledge of system models). However, development and implementation of RL based approaches present their own challenges: the exploration phase, necessary for learning, can lead the system into unsafe regions and accelerate the speed of degradation; further, provable safety guarantees during the operational (exploitation) phase are equally important to ensure safety throughout the system operation. In this context, Safe Reinforcement Learning (Safe RL) paradigm targets development of RL based approaches that prioritize the safety guarantees, along with traditional stability, and optimality of systems. This thesis addresses these challenges by developing novel control learning strategies that adapt to system uncertainties and functional degradation. The main contributions of this thesis lie in proposition of novel approaches to addressing the challenges of system safety and stability, as well as decelerating the speed of degradation, thereby advancing the fields of safe RL and leading to proposition of Degradation-Tolerant Control (DTC). These contributions include:• ensuring the optimality, safety, and stability of control policy during both exploration and exploitation phases of RL. By integrating Control Barrier Functions (CBFs) and Control Lyapunov Functions (CLFs) within the RL framework, safe exploration and stable operation are ensured for both regulation and tracking problems. CBFs are used to define safe operating regions, while CLFs ensure that the system remains stable. These functions are incorporated into the RL algorithms to guide the learning process, ensuring that safety and stability constraints are respected;• decelerating the speed of degradation by incorporating degradation rates into control design, initially employing an optimal control approach in discrete time for linear systems. This ensures that control actions minimize the speed of degradation on system components, thereby extending their lifespan. For nonlinear systems, RL methods are employed to address the problem in both discrete and continuous time, providing adaptable solutions to complex dynamics;• proposal of a novel cyclic RL algorithm to ensure system stability under actuator degradation. This algorithm cyclically updates the learned control law, ensuring proper adaptation as system components degrade. The cyclic nature of the algorithm allows for reassessment and adjustment of control policies, ensuring continuous optimal performance despite ongoing degradation. These developed approaches were implemented through simulations, demonstrating their effectiveness in academic applications. Les systèmes dynamiques critiques pour la sécurité sont essentiels dans divers secteurs, tels que l'aérospatiale, les systèmes autonomes et les robots en santé, où des défaillances peuvent avoir des conséquences catastrophiques. Un défi majeur est la prise en compte de la dégradation des composants et des actionneurs, compromettant la sécurité et la stabilité des systèmes. Il est donc crucial d'intégrer l'état de santé du système dans la conception de la commande pour assurer une tolérance à la dégradation fonctionnelle. Ces systèmes impliquent souvent des incertitudes et des connaissances incomplètes, nécessitant des approches d'apprentissage pour assimiler les données disponibles. L'apprentissage par renforcement (RL) est une approche puissante capable de synthétiser des lois de commande optimales pour des systèmes dynamiques partiellement ou totalement inconnus. Cependant, le développement de ces approches présente des défis : la phase d'exploration nécessaire à l'apprentissage peut entraîner le système dans des régions non sûres, accélérant la dégradation des composants ; en outre, des garanties de sécurité pendant la phase opérationnelle sont cruciales pour assurer la sécurité continue du système. Le paradigme de l'apprentissage par renforcement sûr (Safe RL) vise à développer des approches RL prioritaires aux garanties de sécurité, ainsi qu'à la stabilité et l'optimalité des systèmes. Cette thèse aborde ces défis en synthétisant de nouvelles stratégies d'apprentissage de commande adaptatives aux incertitudes et à la dégradation fonctionnelle. Les contributions principales incluent :• garantir l'optimalité, la sécurité et la stabilité de la loi de commande pendant les phases d'exploration et d'exploitation du RL. En intégrant les fonctions de barrière de commande (CBFs) et les fonctions de Lyapunov de commande (CLFs) dans le cadre du RL, l'exploration sécurisée et l'exploitation stable sont assurées pour les problèmes de régulation et de suivi de trajectoire. Les CBFs définissent des régions de fonctionnement sûres, tandis que les CLFs assurent la stabilité du système. Ces fonctions guident le processus d'apprentissage, garantissant le respect des contraintes de sécurité et de stabilité;• ralentir la vitesse de dégradation en intégrant les taux de dégradation dans la conception de la commande, utilisant initialement une approche de contrôle optimal en temps discret pour les systèmes linéaires. Cela garantit que les actions de contrôle minimisent la dégradation des composants, prolongeant leur durée de vie. Pour les systèmes non linéaires, des méthodes RL sont utilisées pour résoudre le problème en temps discret et continu, fournissant des solutions adaptables aux dynamiques complexes;• proposer un nouvel algorithme de RL cyclique pour garantir la stabilité du système en cas de dégradation des actionneurs. Cet algorithme met à jour dynamiquement la loi de commande apprise, assurant une adaptation adéquate à mesure que les composants se dégradent. La nature cyclique de l'algorithme permet une réévaluation et un ajustement des lois de commande, garantissant une performance optimale continue malgré la dégradation. Ces approches ont été mises en œuvre à travers des simulations, démontrant leur efficacité dans des applications académiques. Connectez-vous pour contacter le contributeur https://hal.univ-lorraine.fr/tel-05010498 Soumis le : lundi 26 janvier 2026-16:27:03 Dernière modification le : jeudi 5 février 2026-05:55:01 Contact Ressources Informations Questions juridiques Portails CCSD
Images (1): 
|
|||||
| When Robots Stumble: Inside the High-Stakes Race for Humanoid Dominance … | https://www.webpronews.com/when-robots-… | 6 | Feb 05, 2026 08:00 | active | |
When Robots Stumble: Inside the High-Stakes Race for Humanoid Dominance After XPeng's Viral MishapDescription: Keywords Content:
The auditorium fell silent as XPeng’s highly anticipated humanoid robot took its first steps onto the stage at the company’s 2025 AI Day event in Guangzhou. What happened next became an instant viral sensation—but not for the reasons the Chinese electric vehicle giant had hoped. The robot, designed to showcase XPeng’s expansion beyond autonomous vehicles into the burgeoning humanoid robotics sector, stumbled forward and crashed face-first onto the stage floor, creating a moment that would reverberate across social media platforms and industry boardrooms worldwide. According to Business Insider, XPeng founder and CEO He Xiaopeng attempted to maintain composure as his company’s robotic ambassador lay prone before hundreds of attendees and countless viewers watching the livestream. The incident, while embarrassing, illuminates the formidable technical challenges facing companies racing to commercialize humanoid robots—a market that analysts project could reach $38 billion by 2035. The stumble also raises critical questions about whether the industry’s ambitions have outpaced its technological capabilities, particularly as Chinese firms accelerate efforts to compete with American robotics pioneers like Boston Dynamics and Tesla. The mishap comes at a pivotal moment for XPeng, which has positioned itself as more than just an electric vehicle manufacturer. The company has invested heavily in artificial intelligence and robotics, viewing humanoid machines as a natural extension of its autonomous driving technology. He Xiaopeng has repeatedly emphasized that the sensors, processors, and AI algorithms developed for self-driving cars translate directly to bipedal robots navigating human environments. Yet the on-stage failure suggests that walking on two legs presents unique challenges that four wheels simply don’t encounter. The Unforgiving Physics of Bipedal Motion Engineering experts point to fundamental differences between wheeled and legged locomotion that make humanoid robots exponentially more complex than their wheeled counterparts. While autonomous vehicles maintain constant contact with the ground across multiple points, bipedal robots must continuously shift their center of gravity while balanced on relatively small footprints. Each step requires split-second calculations involving dozens of joints, motors, and sensors working in perfect synchronization. A single miscalculation in timing, force application, or balance compensation can result in exactly the kind of catastrophic failure witnessed at XPeng’s event. The technical challenges extend beyond mere balance. Humanoid robots must process sensory information about terrain, obstacles, and their own body position while simultaneously planning movements and executing motor commands. This requires computational power, sophisticated algorithms, and sensor arrays that can operate in real-time without latency. When any component in this chain experiences even millisecond delays or minor errors, the results can be spectacular—and not in a good way. Industry insiders note that even Boston Dynamics’ Atlas robot, widely considered the most advanced humanoid platform in existence, required years of development and countless failures before achieving its current capabilities. China’s Aggressive Push Into Humanoid Robotics XPeng’s robotic faceplant occurred against the backdrop of China’s aggressive national strategy to dominate the humanoid robotics sector. Beijing has designated robotics as a strategic priority, with government officials setting ambitious targets for domestic production and deployment. Chinese President Xi Jinping has called for the country to become a “robot power,” leading to substantial state funding and policy support for companies developing humanoid platforms. This governmental backing has spawned dozens of Chinese robotics startups and encouraged established firms like XPeng to diversify into the sector. The competitive pressure extends beyond national borders. Tesla CEO Elon Musk has positioned his company’s Optimus robot as a potential game-changer, claiming it could eventually become more valuable than Tesla’s automotive business. Figure AI, backed by major investors including Microsoft and Nvidia, recently demonstrated its humanoid robot performing warehouse tasks. These developments have created a sense of urgency among Chinese competitors who fear falling behind in a technology that could reshape manufacturing, healthcare, and countless other industries. However, the rush to market may be compromising safety and reliability. Multiple robotics researchers who spoke on condition of anonymity expressed concern that companies are prioritizing flashy demonstrations over fundamental engineering. One veteran robotics engineer noted that public debuts should only occur after extensive private testing has eliminated basic failure modes like balance loss during simple walking. The pressure to show progress to investors and government officials may be pushing companies to showcase technologies before they’re genuinely ready for prime time. The Public Relations Calculus of Failure Despite the immediate embarrassment, some marketing analysts suggest XPeng’s robot mishap might not inflict lasting damage to the company’s brand. In an era where viral moments dominate social media, the incident generated massive awareness for XPeng’s robotics program—awareness that might have cost millions in traditional advertising. The company’s willingness to demonstrate cutting-edge technology in a live, unscripted environment could actually enhance its reputation for transparency and innovation, particularly if XPeng responds appropriately by acknowledging the challenges and demonstrating rapid improvement. Historical precedents support this optimistic interpretation. Boston Dynamics’ early videos showing robots falling, stumbling, and failing in various ways didn’t prevent the company from eventually achieving technical breakthroughs that established it as the industry leader. Tesla’s Autopilot system has experienced well-publicized failures, yet the company maintains strong brand loyalty among customers who appreciate its willingness to push boundaries. The key differentiator lies in how companies respond to setbacks—whether they treat them as learning opportunities or attempt to minimize and deflect criticism. Investor Implications and Market Dynamics Financial markets reacted with surprising mildness to XPeng’s robotic tumble, with the company’s stock experiencing only minor fluctuations in the days following the event. This relatively calm response suggests investors maintain long-term confidence in the humanoid robotics sector despite short-term technical setbacks. Analysts note that the industry remains in its nascent stages, with commercial viability still years away for most applications. Investors appear willing to tolerate development challenges as long as companies demonstrate continued progress and maintain credible roadmaps toward eventual commercialization. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. The auditorium fell silent as XPeng’s highly anticipated humanoid robot took its first steps onto the stage at the company’s 2025 AI Day event in Guangzhou. What happened next became an instant viral sensation—but not for the reasons the Chinese electric vehicle giant had hoped. The robot, designed to showcase XPeng’s expansion beyond autonomous vehicles into the burgeoning humanoid robotics sector, stumbled forward and crashed face-first onto the stage floor, creating a moment that would reverberate across social media platforms and industry boardrooms worldwide. According to Business Insider, XPeng founder and CEO He Xiaopeng attempted to maintain composure as his company’s robotic ambassador lay prone before hundreds of attendees and countless viewers watching the livestream. The incident, while embarrassing, illuminates the formidable technical challenges facing companies racing to commercialize humanoid robots—a market that analysts project could reach $38 billion by 2035. The stumble also raises critical questions about whether the industry’s ambitions have outpaced its technological capabilities, particularly as Chinese firms accelerate efforts to compete with American robotics pioneers like Boston Dynamics and Tesla. The mishap comes at a pivotal moment for XPeng, which has positioned itself as more than just an electric vehicle manufacturer. The company has invested heavily in artificial intelligence and robotics, viewing humanoid machines as a natural extension of its autonomous driving technology. He Xiaopeng has repeatedly emphasized that the sensors, processors, and AI algorithms developed for self-driving cars translate directly to bipedal robots navigating human environments. Yet the on-stage failure suggests that walking on two legs presents unique challenges that four wheels simply don’t encounter. The Unforgiving Physics of Bipedal Motion Engineering experts point to fundamental differences between wheeled and legged locomotion that make humanoid robots exponentially more complex than their wheeled counterparts. While autonomous vehicles maintain constant contact with the ground across multiple points, bipedal robots must continuously shift their center of gravity while balanced on relatively small footprints. Each step requires split-second calculations involving dozens of joints, motors, and sensors working in perfect synchronization. A single miscalculation in timing, force application, or balance compensation can result in exactly the kind of catastrophic failure witnessed at XPeng’s event. The technical challenges extend beyond mere balance. Humanoid robots must process sensory information about terrain, obstacles, and their own body position while simultaneously planning movements and executing motor commands. This requires computational power, sophisticated algorithms, and sensor arrays that can operate in real-time without latency. When any component in this chain experiences even millisecond delays or minor errors, the results can be spectacular—and not in a good way. Industry insiders note that even Boston Dynamics’ Atlas robot, widely considered the most advanced humanoid platform in existence, required years of development and countless failures before achieving its current capabilities. China’s Aggressive Push Into Humanoid Robotics XPeng’s robotic faceplant occurred against the backdrop of China’s aggressive national strategy to dominate the humanoid robotics sector. Beijing has designated robotics as a strategic priority, with government officials setting ambitious targets for domestic production and deployment. Chinese President Xi Jinping has called for the country to become a “robot power,” leading to substantial state funding and policy support for companies developing humanoid platforms. This governmental backing has spawned dozens of Chinese robotics startups and encouraged established firms like XPeng to diversify into the sector. The competitive pressure extends beyond national borders. Tesla CEO Elon Musk has positioned his company’s Optimus robot as a potential game-changer, claiming it could eventually become more valuable than Tesla’s automotive business. Figure AI, backed by major investors including Microsoft and Nvidia, recently demonstrated its humanoid robot performing warehouse tasks. These developments have created a sense of urgency among Chinese competitors who fear falling behind in a technology that could reshape manufacturing, healthcare, and countless other industries. However, the rush to market may be compromising safety and reliability. Multiple robotics researchers who spoke on condition of anonymity expressed concern that companies are prioritizing flashy demonstrations over fundamental engineering. One veteran robotics engineer noted that public debuts should only occur after extensive private testing has eliminated basic failure modes like balance loss during simple walking. The pressure to show progress to investors and government officials may be pushing companies to showcase technologies before they’re genuinely ready for prime time. The Public Relations Calculus of Failure Despite the immediate embarrassment, some marketing analysts suggest XPeng’s robot mishap might not inflict lasting damage to the company’s brand. In an era where viral moments dominate social media, the incident generated massive awareness for XPeng’s robotics program—awareness that might have cost millions in traditional advertising. The company’s willingness to demonstrate cutting-edge technology in a live, unscripted environment could actually enhance its reputation for transparency and innovation, particularly if XPeng responds appropriately by acknowledging the challenges and demonstrating rapid improvement. Historical precedents support this optimistic interpretation. Boston Dynamics’ early videos showing robots falling, stumbling, and failing in various ways didn’t prevent the company from eventually achieving technical breakthroughs that established it as the industry leader. Tesla’s Autopilot system has experienced well-publicized failures, yet the company maintains strong brand loyalty among customers who appreciate its willingness to push boundaries. The key differentiator lies in how companies respond to setbacks—whether they treat them as learning opportunities or attempt to minimize and deflect criticism. Investor Implications and Market Dynamics Financial markets reacted with surprising mildness to XPeng’s robotic tumble, with the company’s stock experiencing only minor fluctuations in the days following the event. This relatively calm response suggests investors maintain long-term confidence in the humanoid robotics sector despite short-term technical setbacks. Analysts note that the industry remains in its nascent stages, with commercial viability still years away for most applications. Investors appear willing to tolerate development challenges as long as companies demonstrate continued progress and maintain credible roadmaps toward eventual commercialization. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. According to Business Insider, XPeng founder and CEO He Xiaopeng attempted to maintain composure as his company’s robotic ambassador lay prone before hundreds of attendees and countless viewers watching the livestream. The incident, while embarrassing, illuminates the formidable technical challenges facing companies racing to commercialize humanoid robots—a market that analysts project could reach $38 billion by 2035. The stumble also raises critical questions about whether the industry’s ambitions have outpaced its technological capabilities, particularly as Chinese firms accelerate efforts to compete with American robotics pioneers like Boston Dynamics and Tesla. The mishap comes at a pivotal moment for XPeng, which has positioned itself as more than just an electric vehicle manufacturer. The company has invested heavily in artificial intelligence and robotics, viewing humanoid machines as a natural extension of its autonomous driving technology. He Xiaopeng has repeatedly emphasized that the sensors, processors, and AI algorithms developed for self-driving cars translate directly to bipedal robots navigating human environments. Yet the on-stage failure suggests that walking on two legs presents unique challenges that four wheels simply don’t encounter. The Unforgiving Physics of Bipedal Motion Engineering experts point to fundamental differences between wheeled and legged locomotion that make humanoid robots exponentially more complex than their wheeled counterparts. While autonomous vehicles maintain constant contact with the ground across multiple points, bipedal robots must continuously shift their center of gravity while balanced on relatively small footprints. Each step requires split-second calculations involving dozens of joints, motors, and sensors working in perfect synchronization. A single miscalculation in timing, force application, or balance compensation can result in exactly the kind of catastrophic failure witnessed at XPeng’s event. The technical challenges extend beyond mere balance. Humanoid robots must process sensory information about terrain, obstacles, and their own body position while simultaneously planning movements and executing motor commands. This requires computational power, sophisticated algorithms, and sensor arrays that can operate in real-time without latency. When any component in this chain experiences even millisecond delays or minor errors, the results can be spectacular—and not in a good way. Industry insiders note that even Boston Dynamics’ Atlas robot, widely considered the most advanced humanoid platform in existence, required years of development and countless failures before achieving its current capabilities. China’s Aggressive Push Into Humanoid Robotics XPeng’s robotic faceplant occurred against the backdrop of China’s aggressive national strategy to dominate the humanoid robotics sector. Beijing has designated robotics as a strategic priority, with government officials setting ambitious targets for domestic production and deployment. Chinese President Xi Jinping has called for the country to become a “robot power,” leading to substantial state funding and policy support for companies developing humanoid platforms. This governmental backing has spawned dozens of Chinese robotics startups and encouraged established firms like XPeng to diversify into the sector. The competitive pressure extends beyond national borders. Tesla CEO Elon Musk has positioned his company’s Optimus robot as a potential game-changer, claiming it could eventually become more valuable than Tesla’s automotive business. Figure AI, backed by major investors including Microsoft and Nvidia, recently demonstrated its humanoid robot performing warehouse tasks. These developments have created a sense of urgency among Chinese competitors who fear falling behind in a technology that could reshape manufacturing, healthcare, and countless other industries. However, the rush to market may be compromising safety and reliability. Multiple robotics researchers who spoke on condition of anonymity expressed concern that companies are prioritizing flashy demonstrations over fundamental engineering. One veteran robotics engineer noted that public debuts should only occur after extensive private testing has eliminated basic failure modes like balance loss during simple walking. The pressure to show progress to investors and government officials may be pushing companies to showcase technologies before they’re genuinely ready for prime time. The Public Relations Calculus of Failure Despite the immediate embarrassment, some marketing analysts suggest XPeng’s robot mishap might not inflict lasting damage to the company’s brand. In an era where viral moments dominate social media, the incident generated massive awareness for XPeng’s robotics program—awareness that might have cost millions in traditional advertising. The company’s willingness to demonstrate cutting-edge technology in a live, unscripted environment could actually enhance its reputation for transparency and innovation, particularly if XPeng responds appropriately by acknowledging the challenges and demonstrating rapid improvement. Historical precedents support this optimistic interpretation. Boston Dynamics’ early videos showing robots falling, stumbling, and failing in various ways didn’t prevent the company from eventually achieving technical breakthroughs that established it as the industry leader. Tesla’s Autopilot system has experienced well-publicized failures, yet the company maintains strong brand loyalty among customers who appreciate its willingness to push boundaries. The key differentiator lies in how companies respond to setbacks—whether they treat them as learning opportunities or attempt to minimize and deflect criticism. Investor Implications and Market Dynamics Financial markets reacted with surprising mildness to XPeng’s robotic tumble, with the company’s stock experiencing only minor fluctuations in the days following the event. This relatively calm response suggests investors maintain long-term confidence in the humanoid robotics sector despite short-term technical setbacks. Analysts note that the industry remains in its nascent stages, with commercial viability still years away for most applications. Investors appear willing to tolerate development challenges as long as companies demonstrate continued progress and maintain credible roadmaps toward eventual commercialization. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. The mishap comes at a pivotal moment for XPeng, which has positioned itself as more than just an electric vehicle manufacturer. The company has invested heavily in artificial intelligence and robotics, viewing humanoid machines as a natural extension of its autonomous driving technology. He Xiaopeng has repeatedly emphasized that the sensors, processors, and AI algorithms developed for self-driving cars translate directly to bipedal robots navigating human environments. Yet the on-stage failure suggests that walking on two legs presents unique challenges that four wheels simply don’t encounter. The Unforgiving Physics of Bipedal Motion Engineering experts point to fundamental differences between wheeled and legged locomotion that make humanoid robots exponentially more complex than their wheeled counterparts. While autonomous vehicles maintain constant contact with the ground across multiple points, bipedal robots must continuously shift their center of gravity while balanced on relatively small footprints. Each step requires split-second calculations involving dozens of joints, motors, and sensors working in perfect synchronization. A single miscalculation in timing, force application, or balance compensation can result in exactly the kind of catastrophic failure witnessed at XPeng’s event. The technical challenges extend beyond mere balance. Humanoid robots must process sensory information about terrain, obstacles, and their own body position while simultaneously planning movements and executing motor commands. This requires computational power, sophisticated algorithms, and sensor arrays that can operate in real-time without latency. When any component in this chain experiences even millisecond delays or minor errors, the results can be spectacular—and not in a good way. Industry insiders note that even Boston Dynamics’ Atlas robot, widely considered the most advanced humanoid platform in existence, required years of development and countless failures before achieving its current capabilities. China’s Aggressive Push Into Humanoid Robotics XPeng’s robotic faceplant occurred against the backdrop of China’s aggressive national strategy to dominate the humanoid robotics sector. Beijing has designated robotics as a strategic priority, with government officials setting ambitious targets for domestic production and deployment. Chinese President Xi Jinping has called for the country to become a “robot power,” leading to substantial state funding and policy support for companies developing humanoid platforms. This governmental backing has spawned dozens of Chinese robotics startups and encouraged established firms like XPeng to diversify into the sector. The competitive pressure extends beyond national borders. Tesla CEO Elon Musk has positioned his company’s Optimus robot as a potential game-changer, claiming it could eventually become more valuable than Tesla’s automotive business. Figure AI, backed by major investors including Microsoft and Nvidia, recently demonstrated its humanoid robot performing warehouse tasks. These developments have created a sense of urgency among Chinese competitors who fear falling behind in a technology that could reshape manufacturing, healthcare, and countless other industries. However, the rush to market may be compromising safety and reliability. Multiple robotics researchers who spoke on condition of anonymity expressed concern that companies are prioritizing flashy demonstrations over fundamental engineering. One veteran robotics engineer noted that public debuts should only occur after extensive private testing has eliminated basic failure modes like balance loss during simple walking. The pressure to show progress to investors and government officials may be pushing companies to showcase technologies before they’re genuinely ready for prime time. The Public Relations Calculus of Failure Despite the immediate embarrassment, some marketing analysts suggest XPeng’s robot mishap might not inflict lasting damage to the company’s brand. In an era where viral moments dominate social media, the incident generated massive awareness for XPeng’s robotics program—awareness that might have cost millions in traditional advertising. The company’s willingness to demonstrate cutting-edge technology in a live, unscripted environment could actually enhance its reputation for transparency and innovation, particularly if XPeng responds appropriately by acknowledging the challenges and demonstrating rapid improvement. Historical precedents support this optimistic interpretation. Boston Dynamics’ early videos showing robots falling, stumbling, and failing in various ways didn’t prevent the company from eventually achieving technical breakthroughs that established it as the industry leader. Tesla’s Autopilot system has experienced well-publicized failures, yet the company maintains strong brand loyalty among customers who appreciate its willingness to push boundaries. The key differentiator lies in how companies respond to setbacks—whether they treat them as learning opportunities or attempt to minimize and deflect criticism. Investor Implications and Market Dynamics Financial markets reacted with surprising mildness to XPeng’s robotic tumble, with the company’s stock experiencing only minor fluctuations in the days following the event. This relatively calm response suggests investors maintain long-term confidence in the humanoid robotics sector despite short-term technical setbacks. Analysts note that the industry remains in its nascent stages, with commercial viability still years away for most applications. Investors appear willing to tolerate development challenges as long as companies demonstrate continued progress and maintain credible roadmaps toward eventual commercialization. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. The Unforgiving Physics of Bipedal Motion Engineering experts point to fundamental differences between wheeled and legged locomotion that make humanoid robots exponentially more complex than their wheeled counterparts. While autonomous vehicles maintain constant contact with the ground across multiple points, bipedal robots must continuously shift their center of gravity while balanced on relatively small footprints. Each step requires split-second calculations involving dozens of joints, motors, and sensors working in perfect synchronization. A single miscalculation in timing, force application, or balance compensation can result in exactly the kind of catastrophic failure witnessed at XPeng’s event. The technical challenges extend beyond mere balance. Humanoid robots must process sensory information about terrain, obstacles, and their own body position while simultaneously planning movements and executing motor commands. This requires computational power, sophisticated algorithms, and sensor arrays that can operate in real-time without latency. When any component in this chain experiences even millisecond delays or minor errors, the results can be spectacular—and not in a good way. Industry insiders note that even Boston Dynamics’ Atlas robot, widely considered the most advanced humanoid platform in existence, required years of development and countless failures before achieving its current capabilities. China’s Aggressive Push Into Humanoid Robotics XPeng’s robotic faceplant occurred against the backdrop of China’s aggressive national strategy to dominate the humanoid robotics sector. Beijing has designated robotics as a strategic priority, with government officials setting ambitious targets for domestic production and deployment. Chinese President Xi Jinping has called for the country to become a “robot power,” leading to substantial state funding and policy support for companies developing humanoid platforms. This governmental backing has spawned dozens of Chinese robotics startups and encouraged established firms like XPeng to diversify into the sector. The competitive pressure extends beyond national borders. Tesla CEO Elon Musk has positioned his company’s Optimus robot as a potential game-changer, claiming it could eventually become more valuable than Tesla’s automotive business. Figure AI, backed by major investors including Microsoft and Nvidia, recently demonstrated its humanoid robot performing warehouse tasks. These developments have created a sense of urgency among Chinese competitors who fear falling behind in a technology that could reshape manufacturing, healthcare, and countless other industries. However, the rush to market may be compromising safety and reliability. Multiple robotics researchers who spoke on condition of anonymity expressed concern that companies are prioritizing flashy demonstrations over fundamental engineering. One veteran robotics engineer noted that public debuts should only occur after extensive private testing has eliminated basic failure modes like balance loss during simple walking. The pressure to show progress to investors and government officials may be pushing companies to showcase technologies before they’re genuinely ready for prime time. The Public Relations Calculus of Failure Despite the immediate embarrassment, some marketing analysts suggest XPeng’s robot mishap might not inflict lasting damage to the company’s brand. In an era where viral moments dominate social media, the incident generated massive awareness for XPeng’s robotics program—awareness that might have cost millions in traditional advertising. The company’s willingness to demonstrate cutting-edge technology in a live, unscripted environment could actually enhance its reputation for transparency and innovation, particularly if XPeng responds appropriately by acknowledging the challenges and demonstrating rapid improvement. Historical precedents support this optimistic interpretation. Boston Dynamics’ early videos showing robots falling, stumbling, and failing in various ways didn’t prevent the company from eventually achieving technical breakthroughs that established it as the industry leader. Tesla’s Autopilot system has experienced well-publicized failures, yet the company maintains strong brand loyalty among customers who appreciate its willingness to push boundaries. The key differentiator lies in how companies respond to setbacks—whether they treat them as learning opportunities or attempt to minimize and deflect criticism. Investor Implications and Market Dynamics Financial markets reacted with surprising mildness to XPeng’s robotic tumble, with the company’s stock experiencing only minor fluctuations in the days following the event. This relatively calm response suggests investors maintain long-term confidence in the humanoid robotics sector despite short-term technical setbacks. Analysts note that the industry remains in its nascent stages, with commercial viability still years away for most applications. Investors appear willing to tolerate development challenges as long as companies demonstrate continued progress and maintain credible roadmaps toward eventual commercialization. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. Engineering experts point to fundamental differences between wheeled and legged locomotion that make humanoid robots exponentially more complex than their wheeled counterparts. While autonomous vehicles maintain constant contact with the ground across multiple points, bipedal robots must continuously shift their center of gravity while balanced on relatively small footprints. Each step requires split-second calculations involving dozens of joints, motors, and sensors working in perfect synchronization. A single miscalculation in timing, force application, or balance compensation can result in exactly the kind of catastrophic failure witnessed at XPeng’s event. The technical challenges extend beyond mere balance. Humanoid robots must process sensory information about terrain, obstacles, and their own body position while simultaneously planning movements and executing motor commands. This requires computational power, sophisticated algorithms, and sensor arrays that can operate in real-time without latency. When any component in this chain experiences even millisecond delays or minor errors, the results can be spectacular—and not in a good way. Industry insiders note that even Boston Dynamics’ Atlas robot, widely considered the most advanced humanoid platform in existence, required years of development and countless failures before achieving its current capabilities. China’s Aggressive Push Into Humanoid Robotics XPeng’s robotic faceplant occurred against the backdrop of China’s aggressive national strategy to dominate the humanoid robotics sector. Beijing has designated robotics as a strategic priority, with government officials setting ambitious targets for domestic production and deployment. Chinese President Xi Jinping has called for the country to become a “robot power,” leading to substantial state funding and policy support for companies developing humanoid platforms. This governmental backing has spawned dozens of Chinese robotics startups and encouraged established firms like XPeng to diversify into the sector. The competitive pressure extends beyond national borders. Tesla CEO Elon Musk has positioned his company’s Optimus robot as a potential game-changer, claiming it could eventually become more valuable than Tesla’s automotive business. Figure AI, backed by major investors including Microsoft and Nvidia, recently demonstrated its humanoid robot performing warehouse tasks. These developments have created a sense of urgency among Chinese competitors who fear falling behind in a technology that could reshape manufacturing, healthcare, and countless other industries. However, the rush to market may be compromising safety and reliability. Multiple robotics researchers who spoke on condition of anonymity expressed concern that companies are prioritizing flashy demonstrations over fundamental engineering. One veteran robotics engineer noted that public debuts should only occur after extensive private testing has eliminated basic failure modes like balance loss during simple walking. The pressure to show progress to investors and government officials may be pushing companies to showcase technologies before they’re genuinely ready for prime time. The Public Relations Calculus of Failure Despite the immediate embarrassment, some marketing analysts suggest XPeng’s robot mishap might not inflict lasting damage to the company’s brand. In an era where viral moments dominate social media, the incident generated massive awareness for XPeng’s robotics program—awareness that might have cost millions in traditional advertising. The company’s willingness to demonstrate cutting-edge technology in a live, unscripted environment could actually enhance its reputation for transparency and innovation, particularly if XPeng responds appropriately by acknowledging the challenges and demonstrating rapid improvement. Historical precedents support this optimistic interpretation. Boston Dynamics’ early videos showing robots falling, stumbling, and failing in various ways didn’t prevent the company from eventually achieving technical breakthroughs that established it as the industry leader. Tesla’s Autopilot system has experienced well-publicized failures, yet the company maintains strong brand loyalty among customers who appreciate its willingness to push boundaries. The key differentiator lies in how companies respond to setbacks—whether they treat them as learning opportunities or attempt to minimize and deflect criticism. Investor Implications and Market Dynamics Financial markets reacted with surprising mildness to XPeng’s robotic tumble, with the company’s stock experiencing only minor fluctuations in the days following the event. This relatively calm response suggests investors maintain long-term confidence in the humanoid robotics sector despite short-term technical setbacks. Analysts note that the industry remains in its nascent stages, with commercial viability still years away for most applications. Investors appear willing to tolerate development challenges as long as companies demonstrate continued progress and maintain credible roadmaps toward eventual commercialization. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. The technical challenges extend beyond mere balance. Humanoid robots must process sensory information about terrain, obstacles, and their own body position while simultaneously planning movements and executing motor commands. This requires computational power, sophisticated algorithms, and sensor arrays that can operate in real-time without latency. When any component in this chain experiences even millisecond delays or minor errors, the results can be spectacular—and not in a good way. Industry insiders note that even Boston Dynamics’ Atlas robot, widely considered the most advanced humanoid platform in existence, required years of development and countless failures before achieving its current capabilities. China’s Aggressive Push Into Humanoid Robotics XPeng’s robotic faceplant occurred against the backdrop of China’s aggressive national strategy to dominate the humanoid robotics sector. Beijing has designated robotics as a strategic priority, with government officials setting ambitious targets for domestic production and deployment. Chinese President Xi Jinping has called for the country to become a “robot power,” leading to substantial state funding and policy support for companies developing humanoid platforms. This governmental backing has spawned dozens of Chinese robotics startups and encouraged established firms like XPeng to diversify into the sector. The competitive pressure extends beyond national borders. Tesla CEO Elon Musk has positioned his company’s Optimus robot as a potential game-changer, claiming it could eventually become more valuable than Tesla’s automotive business. Figure AI, backed by major investors including Microsoft and Nvidia, recently demonstrated its humanoid robot performing warehouse tasks. These developments have created a sense of urgency among Chinese competitors who fear falling behind in a technology that could reshape manufacturing, healthcare, and countless other industries. However, the rush to market may be compromising safety and reliability. Multiple robotics researchers who spoke on condition of anonymity expressed concern that companies are prioritizing flashy demonstrations over fundamental engineering. One veteran robotics engineer noted that public debuts should only occur after extensive private testing has eliminated basic failure modes like balance loss during simple walking. The pressure to show progress to investors and government officials may be pushing companies to showcase technologies before they’re genuinely ready for prime time. The Public Relations Calculus of Failure Despite the immediate embarrassment, some marketing analysts suggest XPeng’s robot mishap might not inflict lasting damage to the company’s brand. In an era where viral moments dominate social media, the incident generated massive awareness for XPeng’s robotics program—awareness that might have cost millions in traditional advertising. The company’s willingness to demonstrate cutting-edge technology in a live, unscripted environment could actually enhance its reputation for transparency and innovation, particularly if XPeng responds appropriately by acknowledging the challenges and demonstrating rapid improvement. Historical precedents support this optimistic interpretation. Boston Dynamics’ early videos showing robots falling, stumbling, and failing in various ways didn’t prevent the company from eventually achieving technical breakthroughs that established it as the industry leader. Tesla’s Autopilot system has experienced well-publicized failures, yet the company maintains strong brand loyalty among customers who appreciate its willingness to push boundaries. The key differentiator lies in how companies respond to setbacks—whether they treat them as learning opportunities or attempt to minimize and deflect criticism. Investor Implications and Market Dynamics Financial markets reacted with surprising mildness to XPeng’s robotic tumble, with the company’s stock experiencing only minor fluctuations in the days following the event. This relatively calm response suggests investors maintain long-term confidence in the humanoid robotics sector despite short-term technical setbacks. Analysts note that the industry remains in its nascent stages, with commercial viability still years away for most applications. Investors appear willing to tolerate development challenges as long as companies demonstrate continued progress and maintain credible roadmaps toward eventual commercialization. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. China’s Aggressive Push Into Humanoid Robotics XPeng’s robotic faceplant occurred against the backdrop of China’s aggressive national strategy to dominate the humanoid robotics sector. Beijing has designated robotics as a strategic priority, with government officials setting ambitious targets for domestic production and deployment. Chinese President Xi Jinping has called for the country to become a “robot power,” leading to substantial state funding and policy support for companies developing humanoid platforms. This governmental backing has spawned dozens of Chinese robotics startups and encouraged established firms like XPeng to diversify into the sector. The competitive pressure extends beyond national borders. Tesla CEO Elon Musk has positioned his company’s Optimus robot as a potential game-changer, claiming it could eventually become more valuable than Tesla’s automotive business. Figure AI, backed by major investors including Microsoft and Nvidia, recently demonstrated its humanoid robot performing warehouse tasks. These developments have created a sense of urgency among Chinese competitors who fear falling behind in a technology that could reshape manufacturing, healthcare, and countless other industries. However, the rush to market may be compromising safety and reliability. Multiple robotics researchers who spoke on condition of anonymity expressed concern that companies are prioritizing flashy demonstrations over fundamental engineering. One veteran robotics engineer noted that public debuts should only occur after extensive private testing has eliminated basic failure modes like balance loss during simple walking. The pressure to show progress to investors and government officials may be pushing companies to showcase technologies before they’re genuinely ready for prime time. The Public Relations Calculus of Failure Despite the immediate embarrassment, some marketing analysts suggest XPeng’s robot mishap might not inflict lasting damage to the company’s brand. In an era where viral moments dominate social media, the incident generated massive awareness for XPeng’s robotics program—awareness that might have cost millions in traditional advertising. The company’s willingness to demonstrate cutting-edge technology in a live, unscripted environment could actually enhance its reputation for transparency and innovation, particularly if XPeng responds appropriately by acknowledging the challenges and demonstrating rapid improvement. Historical precedents support this optimistic interpretation. Boston Dynamics’ early videos showing robots falling, stumbling, and failing in various ways didn’t prevent the company from eventually achieving technical breakthroughs that established it as the industry leader. Tesla’s Autopilot system has experienced well-publicized failures, yet the company maintains strong brand loyalty among customers who appreciate its willingness to push boundaries. The key differentiator lies in how companies respond to setbacks—whether they treat them as learning opportunities or attempt to minimize and deflect criticism. Investor Implications and Market Dynamics Financial markets reacted with surprising mildness to XPeng’s robotic tumble, with the company’s stock experiencing only minor fluctuations in the days following the event. This relatively calm response suggests investors maintain long-term confidence in the humanoid robotics sector despite short-term technical setbacks. Analysts note that the industry remains in its nascent stages, with commercial viability still years away for most applications. Investors appear willing to tolerate development challenges as long as companies demonstrate continued progress and maintain credible roadmaps toward eventual commercialization. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. XPeng’s robotic faceplant occurred against the backdrop of China’s aggressive national strategy to dominate the humanoid robotics sector. Beijing has designated robotics as a strategic priority, with government officials setting ambitious targets for domestic production and deployment. Chinese President Xi Jinping has called for the country to become a “robot power,” leading to substantial state funding and policy support for companies developing humanoid platforms. This governmental backing has spawned dozens of Chinese robotics startups and encouraged established firms like XPeng to diversify into the sector. The competitive pressure extends beyond national borders. Tesla CEO Elon Musk has positioned his company’s Optimus robot as a potential game-changer, claiming it could eventually become more valuable than Tesla’s automotive business. Figure AI, backed by major investors including Microsoft and Nvidia, recently demonstrated its humanoid robot performing warehouse tasks. These developments have created a sense of urgency among Chinese competitors who fear falling behind in a technology that could reshape manufacturing, healthcare, and countless other industries. However, the rush to market may be compromising safety and reliability. Multiple robotics researchers who spoke on condition of anonymity expressed concern that companies are prioritizing flashy demonstrations over fundamental engineering. One veteran robotics engineer noted that public debuts should only occur after extensive private testing has eliminated basic failure modes like balance loss during simple walking. The pressure to show progress to investors and government officials may be pushing companies to showcase technologies before they’re genuinely ready for prime time. The Public Relations Calculus of Failure Despite the immediate embarrassment, some marketing analysts suggest XPeng’s robot mishap might not inflict lasting damage to the company’s brand. In an era where viral moments dominate social media, the incident generated massive awareness for XPeng’s robotics program—awareness that might have cost millions in traditional advertising. The company’s willingness to demonstrate cutting-edge technology in a live, unscripted environment could actually enhance its reputation for transparency and innovation, particularly if XPeng responds appropriately by acknowledging the challenges and demonstrating rapid improvement. Historical precedents support this optimistic interpretation. Boston Dynamics’ early videos showing robots falling, stumbling, and failing in various ways didn’t prevent the company from eventually achieving technical breakthroughs that established it as the industry leader. Tesla’s Autopilot system has experienced well-publicized failures, yet the company maintains strong brand loyalty among customers who appreciate its willingness to push boundaries. The key differentiator lies in how companies respond to setbacks—whether they treat them as learning opportunities or attempt to minimize and deflect criticism. Investor Implications and Market Dynamics Financial markets reacted with surprising mildness to XPeng’s robotic tumble, with the company’s stock experiencing only minor fluctuations in the days following the event. This relatively calm response suggests investors maintain long-term confidence in the humanoid robotics sector despite short-term technical setbacks. Analysts note that the industry remains in its nascent stages, with commercial viability still years away for most applications. Investors appear willing to tolerate development challenges as long as companies demonstrate continued progress and maintain credible roadmaps toward eventual commercialization. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. The competitive pressure extends beyond national borders. Tesla CEO Elon Musk has positioned his company’s Optimus robot as a potential game-changer, claiming it could eventually become more valuable than Tesla’s automotive business. Figure AI, backed by major investors including Microsoft and Nvidia, recently demonstrated its humanoid robot performing warehouse tasks. These developments have created a sense of urgency among Chinese competitors who fear falling behind in a technology that could reshape manufacturing, healthcare, and countless other industries. However, the rush to market may be compromising safety and reliability. Multiple robotics researchers who spoke on condition of anonymity expressed concern that companies are prioritizing flashy demonstrations over fundamental engineering. One veteran robotics engineer noted that public debuts should only occur after extensive private testing has eliminated basic failure modes like balance loss during simple walking. The pressure to show progress to investors and government officials may be pushing companies to showcase technologies before they’re genuinely ready for prime time. The Public Relations Calculus of Failure Despite the immediate embarrassment, some marketing analysts suggest XPeng’s robot mishap might not inflict lasting damage to the company’s brand. In an era where viral moments dominate social media, the incident generated massive awareness for XPeng’s robotics program—awareness that might have cost millions in traditional advertising. The company’s willingness to demonstrate cutting-edge technology in a live, unscripted environment could actually enhance its reputation for transparency and innovation, particularly if XPeng responds appropriately by acknowledging the challenges and demonstrating rapid improvement. Historical precedents support this optimistic interpretation. Boston Dynamics’ early videos showing robots falling, stumbling, and failing in various ways didn’t prevent the company from eventually achieving technical breakthroughs that established it as the industry leader. Tesla’s Autopilot system has experienced well-publicized failures, yet the company maintains strong brand loyalty among customers who appreciate its willingness to push boundaries. The key differentiator lies in how companies respond to setbacks—whether they treat them as learning opportunities or attempt to minimize and deflect criticism. Investor Implications and Market Dynamics Financial markets reacted with surprising mildness to XPeng’s robotic tumble, with the company’s stock experiencing only minor fluctuations in the days following the event. This relatively calm response suggests investors maintain long-term confidence in the humanoid robotics sector despite short-term technical setbacks. Analysts note that the industry remains in its nascent stages, with commercial viability still years away for most applications. Investors appear willing to tolerate development challenges as long as companies demonstrate continued progress and maintain credible roadmaps toward eventual commercialization. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. However, the rush to market may be compromising safety and reliability. Multiple robotics researchers who spoke on condition of anonymity expressed concern that companies are prioritizing flashy demonstrations over fundamental engineering. One veteran robotics engineer noted that public debuts should only occur after extensive private testing has eliminated basic failure modes like balance loss during simple walking. The pressure to show progress to investors and government officials may be pushing companies to showcase technologies before they’re genuinely ready for prime time. The Public Relations Calculus of Failure Despite the immediate embarrassment, some marketing analysts suggest XPeng’s robot mishap might not inflict lasting damage to the company’s brand. In an era where viral moments dominate social media, the incident generated massive awareness for XPeng’s robotics program—awareness that might have cost millions in traditional advertising. The company’s willingness to demonstrate cutting-edge technology in a live, unscripted environment could actually enhance its reputation for transparency and innovation, particularly if XPeng responds appropriately by acknowledging the challenges and demonstrating rapid improvement. Historical precedents support this optimistic interpretation. Boston Dynamics’ early videos showing robots falling, stumbling, and failing in various ways didn’t prevent the company from eventually achieving technical breakthroughs that established it as the industry leader. Tesla’s Autopilot system has experienced well-publicized failures, yet the company maintains strong brand loyalty among customers who appreciate its willingness to push boundaries. The key differentiator lies in how companies respond to setbacks—whether they treat them as learning opportunities or attempt to minimize and deflect criticism. Investor Implications and Market Dynamics Financial markets reacted with surprising mildness to XPeng’s robotic tumble, with the company’s stock experiencing only minor fluctuations in the days following the event. This relatively calm response suggests investors maintain long-term confidence in the humanoid robotics sector despite short-term technical setbacks. Analysts note that the industry remains in its nascent stages, with commercial viability still years away for most applications. Investors appear willing to tolerate development challenges as long as companies demonstrate continued progress and maintain credible roadmaps toward eventual commercialization. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. The Public Relations Calculus of Failure Despite the immediate embarrassment, some marketing analysts suggest XPeng’s robot mishap might not inflict lasting damage to the company’s brand. In an era where viral moments dominate social media, the incident generated massive awareness for XPeng’s robotics program—awareness that might have cost millions in traditional advertising. The company’s willingness to demonstrate cutting-edge technology in a live, unscripted environment could actually enhance its reputation for transparency and innovation, particularly if XPeng responds appropriately by acknowledging the challenges and demonstrating rapid improvement. Historical precedents support this optimistic interpretation. Boston Dynamics’ early videos showing robots falling, stumbling, and failing in various ways didn’t prevent the company from eventually achieving technical breakthroughs that established it as the industry leader. Tesla’s Autopilot system has experienced well-publicized failures, yet the company maintains strong brand loyalty among customers who appreciate its willingness to push boundaries. The key differentiator lies in how companies respond to setbacks—whether they treat them as learning opportunities or attempt to minimize and deflect criticism. Investor Implications and Market Dynamics Financial markets reacted with surprising mildness to XPeng’s robotic tumble, with the company’s stock experiencing only minor fluctuations in the days following the event. This relatively calm response suggests investors maintain long-term confidence in the humanoid robotics sector despite short-term technical setbacks. Analysts note that the industry remains in its nascent stages, with commercial viability still years away for most applications. Investors appear willing to tolerate development challenges as long as companies demonstrate continued progress and maintain credible roadmaps toward eventual commercialization. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. Despite the immediate embarrassment, some marketing analysts suggest XPeng’s robot mishap might not inflict lasting damage to the company’s brand. In an era where viral moments dominate social media, the incident generated massive awareness for XPeng’s robotics program—awareness that might have cost millions in traditional advertising. The company’s willingness to demonstrate cutting-edge technology in a live, unscripted environment could actually enhance its reputation for transparency and innovation, particularly if XPeng responds appropriately by acknowledging the challenges and demonstrating rapid improvement. Historical precedents support this optimistic interpretation. Boston Dynamics’ early videos showing robots falling, stumbling, and failing in various ways didn’t prevent the company from eventually achieving technical breakthroughs that established it as the industry leader. Tesla’s Autopilot system has experienced well-publicized failures, yet the company maintains strong brand loyalty among customers who appreciate its willingness to push boundaries. The key differentiator lies in how companies respond to setbacks—whether they treat them as learning opportunities or attempt to minimize and deflect criticism. Investor Implications and Market Dynamics Financial markets reacted with surprising mildness to XPeng’s robotic tumble, with the company’s stock experiencing only minor fluctuations in the days following the event. This relatively calm response suggests investors maintain long-term confidence in the humanoid robotics sector despite short-term technical setbacks. Analysts note that the industry remains in its nascent stages, with commercial viability still years away for most applications. Investors appear willing to tolerate development challenges as long as companies demonstrate continued progress and maintain credible roadmaps toward eventual commercialization. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. Historical precedents support this optimistic interpretation. Boston Dynamics’ early videos showing robots falling, stumbling, and failing in various ways didn’t prevent the company from eventually achieving technical breakthroughs that established it as the industry leader. Tesla’s Autopilot system has experienced well-publicized failures, yet the company maintains strong brand loyalty among customers who appreciate its willingness to push boundaries. The key differentiator lies in how companies respond to setbacks—whether they treat them as learning opportunities or attempt to minimize and deflect criticism. Investor Implications and Market Dynamics Financial markets reacted with surprising mildness to XPeng’s robotic tumble, with the company’s stock experiencing only minor fluctuations in the days following the event. This relatively calm response suggests investors maintain long-term confidence in the humanoid robotics sector despite short-term technical setbacks. Analysts note that the industry remains in its nascent stages, with commercial viability still years away for most applications. Investors appear willing to tolerate development challenges as long as companies demonstrate continued progress and maintain credible roadmaps toward eventual commercialization. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. Investor Implications and Market Dynamics Financial markets reacted with surprising mildness to XPeng’s robotic tumble, with the company’s stock experiencing only minor fluctuations in the days following the event. This relatively calm response suggests investors maintain long-term confidence in the humanoid robotics sector despite short-term technical setbacks. Analysts note that the industry remains in its nascent stages, with commercial viability still years away for most applications. Investors appear willing to tolerate development challenges as long as companies demonstrate continued progress and maintain credible roadmaps toward eventual commercialization. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. Financial markets reacted with surprising mildness to XPeng’s robotic tumble, with the company’s stock experiencing only minor fluctuations in the days following the event. This relatively calm response suggests investors maintain long-term confidence in the humanoid robotics sector despite short-term technical setbacks. Analysts note that the industry remains in its nascent stages, with commercial viability still years away for most applications. Investors appear willing to tolerate development challenges as long as companies demonstrate continued progress and maintain credible roadmaps toward eventual commercialization. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. The incident does, however, highlight risks for companies that may be overpromising on timelines. XPeng and competitors have made bold claims about when humanoid robots will become practical for real-world applications, with some suggesting deployment within two to three years. The on-stage failure serves as a reminder that fundamental technical challenges remain unsolved, potentially pushing realistic commercial deployment further into the future than optimistic projections suggest. Investors with shorter time horizons may need to recalibrate expectations accordingly. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. The Road Ahead for Humanoid Development Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. Despite XPeng’s stumble, industry experts remain convinced that humanoid robots represent an inevitable technological evolution. The fundamental value proposition—machines that can navigate human environments and use human tools without requiring infrastructure modifications—remains compelling across numerous sectors. Manufacturing facilities, warehouses, healthcare institutions, and households all present potential applications where bipedal robots could provide significant value. The question isn’t whether humanoid robots will succeed, but rather when they’ll achieve sufficient reliability and cost-effectiveness for widespread adoption. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. Technical progress continues at multiple companies simultaneously, creating a competitive dynamic that should accelerate innovation. Each failure provides data that helps engineers refine algorithms, improve hardware, and better understand the challenges involved. The robotics community has historically been collaborative, with researchers publishing findings and sharing insights that benefit the entire field. This open approach, combined with substantial capital investment from both private and government sources, suggests that solutions to current technical challenges will eventually emerge. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. The XPeng incident ultimately serves as a valuable reminder that transformative technologies rarely develop in straight lines. The path from laboratory prototypes to reliable commercial products invariably includes setbacks, failures, and embarrassing moments. What matters most is whether companies learn from these experiences and apply those lessons to create better, more reliable systems. For XPeng and the broader humanoid robotics industry, the real test won’t be whether robots occasionally fall down—it will be whether they can consistently get back up, learn from their mistakes, and eventually walk confidently into a future where humans and humanoid machines work side by side. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. As the industry processes this latest reminder of robotics’ challenges, one thing remains certain: the race to develop practical humanoid robots will continue unabated, driven by massive market potential and national strategic interests. XPeng’s fallen robot may have stumbled, but the march toward a future populated by bipedal machines continues forward, one careful step at a time. Subscribe for Updates The ChinaRevolutionUpdate Email Newsletter focuses on the latest technological innovations in China. It’s your go-to resource for understanding China's growing impact on global business and tech. Help us improve our content by reporting any issues you find. Get the free daily newsletter read by decision makers Get our media kit Deliver your marketing message directly to decision makers.
Images (6): 



|
|||||
| Il sistema robot di Figure AI è completo: il cervello … | https://www.dday.it/redazione/56141/il-… | 1 | Feb 04, 2026 16:01 | active | |
Il sistema robot di Figure AI è completo: il cervello Helix 02 ha una “memoria muscolare“. Il video | DDay.itDescription: Il robot Figure 03 carica la lavastoviglie in completa autonomia. Cambia il modo in cui lo fa, con il software Helix 02 che sostituisce 100mila righe di codice con una "memoria muscolare" appresa Content:
Figure AI, la startup robotica fondata dallo statunitense Brett Adcock quattro anni fa, ha presentato Helix 02, la nuova architettura software che estende il controllo tramite reti neurali all'intera struttura meccanica del robot umanoide. Infatti, se la precedente iterazione del sistema si limitava a gestire la manipolazione del busto superiore (ed è per questo che, tranne in un certo senso nel video della lavatrice, i robot di Figure erano sostanzialmente fermi sul posto nei filmati promozionali) l'aggiornamento appena lanciato unifica camminata, equilibrio e destrezza manuale in un unico flusso continuo governato dall'intelligenza artificiale, eliminando la necessità di integrare controllori separati per il movimento e l'interazione. Per mostrare cosa è capace di fare Helix 02, Figure AI ha pubblicato un video in cui un’unità Figure 03 carica una lavastoviglie spostandosi tra le dispense e l’elettrodomestico. Abbiamo già visto un video simile con il lancio commerciale di Neo della startup 1X, ma in quella circostanza si trattava di un robot teleoperato. Nel caso di Figure AI, il robot opera in completa autonomia, almeno secondo quanto dichiarato dalla società di Adcock. La novità strutturale sta nell'introduzione di un nuovo livello di base denominato "System 0". Questo modulo agisce come un modello fondamentale per il controllo fisico, addestrato su oltre mille ore di dati biomeccanici umani e simulazioni avanzate. Operando a una frequenza di 1 kHz, il System 0 gestisce la stabilità, il contatto col suolo e la coordinazione corporea, sostituendo oltre centomila righe di codice C++ con un singolo prior neurale appreso. In breve, questo neurone software è una sorta di "memoria muscolare digitale". Il robot non calcola la fisica passo dopo passo, ma "sa" istintivamente come muoversi grazie a un modello statistico derivato dall'osservazione umana. Pur senza dettagliare il funzionamento specifico del suo vecchio algoritmo, Figure AI ha quindi abbandonato le rigide istruzioni logiche scritte manualmente dagli ingegneri in favore di un sistema fluido, che apprende l'azione invece di essere programmato per eseguirla. Questo strato System 0 lavora in concerto con i moduli superiori già noti nella prima versione di Helix: il System 1, che traduce la percezione in comandi motori a 200 Hz, e il System 2, deputato al ragionamento semantico e alla comprensione del linguaggio naturale. L'architettura risultante permette al robot di elaborare intenzioni complesse e tradurle istantaneamente in movimenti fluidi, mantenendo l'equilibrio anche durante compiti dinamici. Guardano il tutto da un punto di vista più pratico, Helix 02 elabora simultaneamente input visivi, propriocettivi (che comunicano istante per istante l'angolazione delle articolazioni, la tensione “muscolare” e la velocità di movimento) e tattili per coordinare ogni giunto, dalle gambe alle singole dita. Sfruttando l'hardware del robot Figure 03, che include sensori tattili nei polpastrelli e telecamere palmari, secondo Figure AI Helix 02 raggiunge livelli di manipolazione fine precedentemente inaccessibili. Le dimostrazioni hanno evidenziato capacità di alta precisione, come l'estrazione di singole pillole da contenitori disordinati, il dosaggio millimetrico di liquidi tramite siringhe e la manipolazione di oggetti occlusi alla vista principale, dove la sensibilità alla forza e il feedback tattile diventano essenziali. Il tutto si è tradotto nel video mostrato da Figure nel carico della lavastovigle, con il sistema che naviga e manipola senza soluzioni di continuità, utilizzando l'intero corpo, inclusi anca e piedi per chiudere sportelli o stabilizzare il carico, e correggendo in tempo reale eventuali errori o imprevisti senza intervento umano. Secondo Figure AI, questo modo di operare di Helix 02 avvicina la piattaforma a una reale autonomia operativa in ambienti non strutturati. Tuttavia, non possiamo sapere come Figure 03 con Helix 02 si comporterebbe in una cucina disordinata o con un altro elettrodomestico (per esempio con una vaschetta per le tab di altro tipo) o anche con stoviglie e dispense di colori e forme diverse. © riproduzione riservata Copyright © 2026 DDay.it - Scripta Manent servizi editoriali srl - Tutti i diritti sono riservati - P.IVA 11967100154
Images (1): 
|
|||||
| Even Tesla China is feeling the Optimus V3 fever | https://www.teslarati.com/tesla-china-f… | 1 | Feb 03, 2026 16:00 | active | |
Even Tesla China is feeling the Optimus V3 feverURL: https://www.teslarati.com/tesla-china-focus-optimus-v3-humanoid-robot/ Description: Tesla China seems to have caught the Optimus V3 fever, with the electric vehicle maker teasing the impending arrival of the humanoid robot. Content:
Elon Musk and xAI donate generators to TN amid historic power outages Tesla-inspired door handles prohibited under China’s new safety standard Tesla’s global fleet surpasses 9 million vehicles worldwide Tesla launches new affordable Model Y configuration in the U.S. SpaceX officially acquires xAI, merging rockets with AI expertise Tesla-inspired door handles prohibited under China’s new safety standard Tesla’s global fleet surpasses 9 million vehicles worldwide Tesla launches new affordable Model Y configuration in the U.S. Tesla Model Y Performance Review: The Best Trim of the Best Vehicle? Elon Musk explains why Tesla’s 4680 battery breakthrough is a big deal SpaceX officially acquires xAI, merging rockets with AI expertise Rumored SpaceX-xAI merger gets apparent confirmation from Elon Musk SpaceX reportedly discussing merger with xAI ahead of blockbuster IPO SpaceX Starship V3 gets launch date update from Elon Musk Elon Musk shares insights on SpaceX and Tesla’s potential scale Elon Musk and xAI donate generators to TN amid historic power outages SpaceX officially acquires xAI, merging rockets with AI expertise Elon Musk explains why Tesla’s 4680 battery breakthrough is a big deal Tesla director pay lawsuit sees lawyer fees slashed by $100 million SpaceX-xAI merger discussions in advanced stage: report As per Tesla China, Optimus V3 is “about to be unveiled.” Published on By Even Tesla China seems to have caught the Optimus V3 fever, with the electric vehicle maker teasing the impending arrival of the humanoid robot on its official Weibo account. As per Tesla China, Optimus V3 is “about to be unveiled.” Tesla China hypes up Optimus V3 Tesla China noted on its Weibo post that Optimus V3 is redesigned from first principles and is capable of learning new tasks by observing human behavior. The company has stated that it is targeting annual production capacity of up to one million humanoid robots once manufacturing scales. During the Q4 and FY 2025 earnings call, CEO Elon Musk stated that Tesla will wind down Model S and Model X production to free up factory space for the pilot production line of Optimus V3. Advertisement Musk later noted that Giga Texas should have a significantly larger Optimus line, though that will produce Optimus V4. He also made it a point to set expectations with Optimus’ production ramp, stating that the “normal S curve of manufacturing ramp will be longer for Optimus.” Credit: Tesla China Tesla China’s potential role Tesla’s decision to announce the Optimus update on Weibo highlights the importance of the humanoid robot in the company’s global operations. Giga Shanghai is already Tesla’s largest manufacturing hub by volume, and Musk has repeatedly described China’s manufacturers as Tesla’s most legitimate competitors. While Tesla has not confirmed where Optimus V3 will be produced or deployed first, the scale and efficiency of Gigafactory Shanghai make it a plausible candidate for future humanoid robot manufacturing or in-factory deployment. Musk has also suggested that Optimus could become available for public purchase as early as 2027, as noted in a CNEV Post report. “It’s going to be a very capable robot. I think long-term Optimus will have a very significant impact on the US GDP. It will actually move the needle on US GDP significantly. In conclusion, there are still many who doubt our ambitions for creating amazing abundance. We are confident it can be done, and we are making the right moves technologically to ensure that it does,” Musk said during the earnings call. As per Tesla China, Optimus V3 is “about to be unveiled.” Tesla China hypes up Optimus V3 Tesla China noted on its Weibo post that Optimus V3 is redesigned from first principles and is capable of learning new tasks by observing human behavior. The company has stated that it is targeting annual production capacity of up to one million humanoid robots once manufacturing scales. During the Q4 and FY 2025 earnings call, CEO Elon Musk stated that Tesla will wind down Model S and Model X production to free up factory space for the pilot production line of Optimus V3. Advertisement Musk later noted that Giga Texas should have a significantly larger Optimus line, though that will produce Optimus V4. He also made it a point to set expectations with Optimus’ production ramp, stating that the “normal S curve of manufacturing ramp will be longer for Optimus.” Credit: Tesla China Tesla China’s potential role Tesla’s decision to announce the Optimus update on Weibo highlights the importance of the humanoid robot in the company’s global operations. Giga Shanghai is already Tesla’s largest manufacturing hub by volume, and Musk has repeatedly described China’s manufacturers as Tesla’s most legitimate competitors. While Tesla has not confirmed where Optimus V3 will be produced or deployed first, the scale and efficiency of Gigafactory Shanghai make it a plausible candidate for future humanoid robot manufacturing or in-factory deployment. Musk has also suggested that Optimus could become available for public purchase as early as 2027, as noted in a CNEV Post report. “It’s going to be a very capable robot. I think long-term Optimus will have a very significant impact on the US GDP. It will actually move the needle on US GDP significantly. In conclusion, there are still many who doubt our ambitions for creating amazing abundance. We are confident it can be done, and we are making the right moves technologically to ensure that it does,” Musk said during the earnings call. Tesla China noted on its Weibo post that Optimus V3 is redesigned from first principles and is capable of learning new tasks by observing human behavior. The company has stated that it is targeting annual production capacity of up to one million humanoid robots once manufacturing scales. During the Q4 and FY 2025 earnings call, CEO Elon Musk stated that Tesla will wind down Model S and Model X production to free up factory space for the pilot production line of Optimus V3. Advertisement Musk later noted that Giga Texas should have a significantly larger Optimus line, though that will produce Optimus V4. He also made it a point to set expectations with Optimus’ production ramp, stating that the “normal S curve of manufacturing ramp will be longer for Optimus.” Credit: Tesla China Tesla China’s potential role Tesla’s decision to announce the Optimus update on Weibo highlights the importance of the humanoid robot in the company’s global operations. Giga Shanghai is already Tesla’s largest manufacturing hub by volume, and Musk has repeatedly described China’s manufacturers as Tesla’s most legitimate competitors. While Tesla has not confirmed where Optimus V3 will be produced or deployed first, the scale and efficiency of Gigafactory Shanghai make it a plausible candidate for future humanoid robot manufacturing or in-factory deployment. Musk has also suggested that Optimus could become available for public purchase as early as 2027, as noted in a CNEV Post report. “It’s going to be a very capable robot. I think long-term Optimus will have a very significant impact on the US GDP. It will actually move the needle on US GDP significantly. In conclusion, there are still many who doubt our ambitions for creating amazing abundance. We are confident it can be done, and we are making the right moves technologically to ensure that it does,” Musk said during the earnings call. During the Q4 and FY 2025 earnings call, CEO Elon Musk stated that Tesla will wind down Model S and Model X production to free up factory space for the pilot production line of Optimus V3. Advertisement Musk later noted that Giga Texas should have a significantly larger Optimus line, though that will produce Optimus V4. He also made it a point to set expectations with Optimus’ production ramp, stating that the “normal S curve of manufacturing ramp will be longer for Optimus.” Credit: Tesla China Tesla China’s potential role Tesla’s decision to announce the Optimus update on Weibo highlights the importance of the humanoid robot in the company’s global operations. Giga Shanghai is already Tesla’s largest manufacturing hub by volume, and Musk has repeatedly described China’s manufacturers as Tesla’s most legitimate competitors. While Tesla has not confirmed where Optimus V3 will be produced or deployed first, the scale and efficiency of Gigafactory Shanghai make it a plausible candidate for future humanoid robot manufacturing or in-factory deployment. Musk has also suggested that Optimus could become available for public purchase as early as 2027, as noted in a CNEV Post report. “It’s going to be a very capable robot. I think long-term Optimus will have a very significant impact on the US GDP. It will actually move the needle on US GDP significantly. In conclusion, there are still many who doubt our ambitions for creating amazing abundance. We are confident it can be done, and we are making the right moves technologically to ensure that it does,” Musk said during the earnings call. Musk later noted that Giga Texas should have a significantly larger Optimus line, though that will produce Optimus V4. He also made it a point to set expectations with Optimus’ production ramp, stating that the “normal S curve of manufacturing ramp will be longer for Optimus.” Credit: Tesla China Tesla China’s potential role Tesla’s decision to announce the Optimus update on Weibo highlights the importance of the humanoid robot in the company’s global operations. Giga Shanghai is already Tesla’s largest manufacturing hub by volume, and Musk has repeatedly described China’s manufacturers as Tesla’s most legitimate competitors. While Tesla has not confirmed where Optimus V3 will be produced or deployed first, the scale and efficiency of Gigafactory Shanghai make it a plausible candidate for future humanoid robot manufacturing or in-factory deployment. Musk has also suggested that Optimus could become available for public purchase as early as 2027, as noted in a CNEV Post report. “It’s going to be a very capable robot. I think long-term Optimus will have a very significant impact on the US GDP. It will actually move the needle on US GDP significantly. In conclusion, there are still many who doubt our ambitions for creating amazing abundance. We are confident it can be done, and we are making the right moves technologically to ensure that it does,” Musk said during the earnings call. Tesla’s decision to announce the Optimus update on Weibo highlights the importance of the humanoid robot in the company’s global operations. Giga Shanghai is already Tesla’s largest manufacturing hub by volume, and Musk has repeatedly described China’s manufacturers as Tesla’s most legitimate competitors. While Tesla has not confirmed where Optimus V3 will be produced or deployed first, the scale and efficiency of Gigafactory Shanghai make it a plausible candidate for future humanoid robot manufacturing or in-factory deployment. Musk has also suggested that Optimus could become available for public purchase as early as 2027, as noted in a CNEV Post report. “It’s going to be a very capable robot. I think long-term Optimus will have a very significant impact on the US GDP. It will actually move the needle on US GDP significantly. In conclusion, there are still many who doubt our ambitions for creating amazing abundance. We are confident it can be done, and we are making the right moves technologically to ensure that it does,” Musk said during the earnings call. While Tesla has not confirmed where Optimus V3 will be produced or deployed first, the scale and efficiency of Gigafactory Shanghai make it a plausible candidate for future humanoid robot manufacturing or in-factory deployment. Musk has also suggested that Optimus could become available for public purchase as early as 2027, as noted in a CNEV Post report. “It’s going to be a very capable robot. I think long-term Optimus will have a very significant impact on the US GDP. It will actually move the needle on US GDP significantly. In conclusion, there are still many who doubt our ambitions for creating amazing abundance. We are confident it can be done, and we are making the right moves technologically to ensure that it does,” Musk said during the earnings call. “It’s going to be a very capable robot. I think long-term Optimus will have a very significant impact on the US GDP. It will actually move the needle on US GDP significantly. In conclusion, there are still many who doubt our ambitions for creating amazing abundance. We are confident it can be done, and we are making the right moves technologically to ensure that it does,” Musk said during the earnings call. Simon is an experienced automotive reporter with a passion for electric cars and clean energy. Fascinated by the world envisioned by Elon Musk, he hopes to make it to Mars (at least as a tourist) someday. For stories or tips--or even to just say a simple hello--send a message to his email, simon@teslarati.com or his handle on X, @ResidentSponge. The donation comes as thousands of households have gone days without electricity amid freezing temperatures. Published on By Elon Musk has donated hundreds of generators to Tennessee residents still without power following a historic winter storm, as per an update from Governor Bill Lee. The donation comes as thousands of households have gone days without electricity amid freezing temperatures. Musk donates generators As noted in a report from WSMV4, the historic storm that hit Tennessee resulted in hundreds of thousands of residents experiencing a power outage at the end of January. Thousands are still living without power or heat in freezing temperatures for up to nine days. As per TN Gov. Bill Lee in a post on X, Elon Musk and xAI have donated hundreds of generators to assist residents in affected areas. “Tennesseans without power need immediate help. I’m deeply grateful to @elonmusk & @xAI for going above & beyond to support Tennesseans by donating hundreds of generators to fill the gap, & I value their continued partnership to solve problems & support communities across our state,” he wrote in his post. Advertisement Tennessee officials have stated that recovery efforts remain ongoing as crews work to restore power and address damage caused by the winter storm. The generators are expected to provide temporary relief for residents facing power outages during freezing conditions. You’re most welcome. We’re working on providing Tesla Powerwalls too.— Elon Musk (@elonmusk) February 2, 2026 All Superchargers in Mississippi and Tennessee are online. Free Supercharging enabled to help those affected in areas with persistent power outages:Grenada, MS https://t.co/9rrnlYwkuMTupelo, MS https://t.co/m7UCJzFrD4Corinth, MS https://t.co/UMNnEPlJVpSouthhaven, MS…— Tesla Charging (@TeslaCharging) February 3, 2026 Tesla Powerwalls may follow Musk publicly responded to the governor’s post while hinting that additional help may be on the way. This time, the additional support would be coming from Musk’s electric vehicle company, Tesla. “You’re most welcome. We’re working on providing Tesla Powerwalls too,” Musk wrote in his response to the official. Even before Elon Musk’s comment, Tesla had already extended help to affected customers in Mississippi and Tennessee. In a post on X, the official Tesla Charging account noted that all Superchargers in the two states are online, and free Supercharging has been enabled to help those in areas that are affected by persistent power outages. Advertisement These include Grenada, Tupelo, Corinth, Southhaven, and Horn Lake in Mississippi and several Supercharging sites in Memphis, Tennessee. The donation comes as thousands of households have gone days without electricity amid freezing temperatures. Musk donates generators As noted in a report from WSMV4, the historic storm that hit Tennessee resulted in hundreds of thousands of residents experiencing a power outage at the end of January. Thousands are still living without power or heat in freezing temperatures for up to nine days. As per TN Gov. Bill Lee in a post on X, Elon Musk and xAI have donated hundreds of generators to assist residents in affected areas. “Tennesseans without power need immediate help. I’m deeply grateful to @elonmusk & @xAI for going above & beyond to support Tennesseans by donating hundreds of generators to fill the gap, & I value their continued partnership to solve problems & support communities across our state,” he wrote in his post. Advertisement Tennessee officials have stated that recovery efforts remain ongoing as crews work to restore power and address damage caused by the winter storm. The generators are expected to provide temporary relief for residents facing power outages during freezing conditions. You’re most welcome. We’re working on providing Tesla Powerwalls too.— Elon Musk (@elonmusk) February 2, 2026 All Superchargers in Mississippi and Tennessee are online. Free Supercharging enabled to help those affected in areas with persistent power outages:Grenada, MS https://t.co/9rrnlYwkuMTupelo, MS https://t.co/m7UCJzFrD4Corinth, MS https://t.co/UMNnEPlJVpSouthhaven, MS…— Tesla Charging (@TeslaCharging) February 3, 2026 Tesla Powerwalls may follow Musk publicly responded to the governor’s post while hinting that additional help may be on the way. This time, the additional support would be coming from Musk’s electric vehicle company, Tesla. “You’re most welcome. We’re working on providing Tesla Powerwalls too,” Musk wrote in his response to the official. Even before Elon Musk’s comment, Tesla had already extended help to affected customers in Mississippi and Tennessee. In a post on X, the official Tesla Charging account noted that all Superchargers in the two states are online, and free Supercharging has been enabled to help those in areas that are affected by persistent power outages. Advertisement These include Grenada, Tupelo, Corinth, Southhaven, and Horn Lake in Mississippi and several Supercharging sites in Memphis, Tennessee. As noted in a report from WSMV4, the historic storm that hit Tennessee resulted in hundreds of thousands of residents experiencing a power outage at the end of January. Thousands are still living without power or heat in freezing temperatures for up to nine days. As per TN Gov. Bill Lee in a post on X, Elon Musk and xAI have donated hundreds of generators to assist residents in affected areas. “Tennesseans without power need immediate help. I’m deeply grateful to @elonmusk & @xAI for going above & beyond to support Tennesseans by donating hundreds of generators to fill the gap, & I value their continued partnership to solve problems & support communities across our state,” he wrote in his post. Advertisement Tennessee officials have stated that recovery efforts remain ongoing as crews work to restore power and address damage caused by the winter storm. The generators are expected to provide temporary relief for residents facing power outages during freezing conditions. You’re most welcome. We’re working on providing Tesla Powerwalls too.— Elon Musk (@elonmusk) February 2, 2026 All Superchargers in Mississippi and Tennessee are online. Free Supercharging enabled to help those affected in areas with persistent power outages:Grenada, MS https://t.co/9rrnlYwkuMTupelo, MS https://t.co/m7UCJzFrD4Corinth, MS https://t.co/UMNnEPlJVpSouthhaven, MS…— Tesla Charging (@TeslaCharging) February 3, 2026 Tesla Powerwalls may follow Musk publicly responded to the governor’s post while hinting that additional help may be on the way. This time, the additional support would be coming from Musk’s electric vehicle company, Tesla. “You’re most welcome. We’re working on providing Tesla Powerwalls too,” Musk wrote in his response to the official. Even before Elon Musk’s comment, Tesla had already extended help to affected customers in Mississippi and Tennessee. In a post on X, the official Tesla Charging account noted that all Superchargers in the two states are online, and free Supercharging has been enabled to help those in areas that are affected by persistent power outages. Advertisement These include Grenada, Tupelo, Corinth, Southhaven, and Horn Lake in Mississippi and several Supercharging sites in Memphis, Tennessee. As per TN Gov. Bill Lee in a post on X, Elon Musk and xAI have donated hundreds of generators to assist residents in affected areas. “Tennesseans without power need immediate help. I’m deeply grateful to @elonmusk & @xAI for going above & beyond to support Tennesseans by donating hundreds of generators to fill the gap, & I value their continued partnership to solve problems & support communities across our state,” he wrote in his post. Advertisement Tennessee officials have stated that recovery efforts remain ongoing as crews work to restore power and address damage caused by the winter storm. The generators are expected to provide temporary relief for residents facing power outages during freezing conditions. You’re most welcome. We’re working on providing Tesla Powerwalls too.— Elon Musk (@elonmusk) February 2, 2026 All Superchargers in Mississippi and Tennessee are online. Free Supercharging enabled to help those affected in areas with persistent power outages:Grenada, MS https://t.co/9rrnlYwkuMTupelo, MS https://t.co/m7UCJzFrD4Corinth, MS https://t.co/UMNnEPlJVpSouthhaven, MS…— Tesla Charging (@TeslaCharging) February 3, 2026 Tesla Powerwalls may follow Musk publicly responded to the governor’s post while hinting that additional help may be on the way. This time, the additional support would be coming from Musk’s electric vehicle company, Tesla. “You’re most welcome. We’re working on providing Tesla Powerwalls too,” Musk wrote in his response to the official. Even before Elon Musk’s comment, Tesla had already extended help to affected customers in Mississippi and Tennessee. In a post on X, the official Tesla Charging account noted that all Superchargers in the two states are online, and free Supercharging has been enabled to help those in areas that are affected by persistent power outages. Advertisement These include Grenada, Tupelo, Corinth, Southhaven, and Horn Lake in Mississippi and several Supercharging sites in Memphis, Tennessee. Tennessee officials have stated that recovery efforts remain ongoing as crews work to restore power and address damage caused by the winter storm. The generators are expected to provide temporary relief for residents facing power outages during freezing conditions. You’re most welcome. We’re working on providing Tesla Powerwalls too.— Elon Musk (@elonmusk) February 2, 2026 All Superchargers in Mississippi and Tennessee are online. Free Supercharging enabled to help those affected in areas with persistent power outages:Grenada, MS https://t.co/9rrnlYwkuMTupelo, MS https://t.co/m7UCJzFrD4Corinth, MS https://t.co/UMNnEPlJVpSouthhaven, MS…— Tesla Charging (@TeslaCharging) February 3, 2026 Tesla Powerwalls may follow Musk publicly responded to the governor’s post while hinting that additional help may be on the way. This time, the additional support would be coming from Musk’s electric vehicle company, Tesla. “You’re most welcome. We’re working on providing Tesla Powerwalls too,” Musk wrote in his response to the official. Even before Elon Musk’s comment, Tesla had already extended help to affected customers in Mississippi and Tennessee. In a post on X, the official Tesla Charging account noted that all Superchargers in the two states are online, and free Supercharging has been enabled to help those in areas that are affected by persistent power outages. Advertisement These include Grenada, Tupelo, Corinth, Southhaven, and Horn Lake in Mississippi and several Supercharging sites in Memphis, Tennessee. You’re most welcome. We’re working on providing Tesla Powerwalls too.— Elon Musk (@elonmusk) February 2, 2026 All Superchargers in Mississippi and Tennessee are online. Free Supercharging enabled to help those affected in areas with persistent power outages:Grenada, MS https://t.co/9rrnlYwkuMTupelo, MS https://t.co/m7UCJzFrD4Corinth, MS https://t.co/UMNnEPlJVpSouthhaven, MS…— Tesla Charging (@TeslaCharging) February 3, 2026 Musk publicly responded to the governor’s post while hinting that additional help may be on the way. This time, the additional support would be coming from Musk’s electric vehicle company, Tesla. “You’re most welcome. We’re working on providing Tesla Powerwalls too,” Musk wrote in his response to the official. Even before Elon Musk’s comment, Tesla had already extended help to affected customers in Mississippi and Tennessee. In a post on X, the official Tesla Charging account noted that all Superchargers in the two states are online, and free Supercharging has been enabled to help those in areas that are affected by persistent power outages. Advertisement These include Grenada, Tupelo, Corinth, Southhaven, and Horn Lake in Mississippi and several Supercharging sites in Memphis, Tennessee. “You’re most welcome. We’re working on providing Tesla Powerwalls too,” Musk wrote in his response to the official. Even before Elon Musk’s comment, Tesla had already extended help to affected customers in Mississippi and Tennessee. In a post on X, the official Tesla Charging account noted that all Superchargers in the two states are online, and free Supercharging has been enabled to help those in areas that are affected by persistent power outages. Advertisement These include Grenada, Tupelo, Corinth, Southhaven, and Horn Lake in Mississippi and several Supercharging sites in Memphis, Tennessee. Even before Elon Musk’s comment, Tesla had already extended help to affected customers in Mississippi and Tennessee. In a post on X, the official Tesla Charging account noted that all Superchargers in the two states are online, and free Supercharging has been enabled to help those in areas that are affected by persistent power outages. Advertisement These include Grenada, Tupelo, Corinth, Southhaven, and Horn Lake in Mississippi and several Supercharging sites in Memphis, Tennessee. These include Grenada, Tupelo, Corinth, Southhaven, and Horn Lake in Mississippi and several Supercharging sites in Memphis, Tennessee. The rule effectively ends a design trend pioneered by Tesla and widely adopted across China’s electric vehicle market. Published on By China will ban hidden door handles on electric vehicles starting 2027 under a new national safety standard, forcing automakers to equip their cars with mechanical exterior and interior handles. The rule effectively ends a design trend pioneered by Tesla and widely adopted across China’s electric vehicle market. China bans hidden door handles China’s Ministry of Industry and Information Technology (MIIT) noted that the new mandatory national auto safety standard on EV door handles will take effect on January 1, 2027. For models that have already received approval and are scheduled for launch, automakers will be allowed to complete required design changes by January 2029. Under the new rules, exterior door handles must remain operable even in scenarios involving irreversible restraint system failures or thermal runaway incidents in the battery pack. Doors must also be capable of opening even if the vehicle loses electrical power. Interior doors must include at least one independent mechanical release handle per door as well.Advertisement Safety concerns drive rollback Hidden and electrically actuated door handles have become mainstream in recent years as EV makers pursued cleaner styling and improved aerodynamics. Tesla pioneered the hidden handle design, and it was adopted by most Chinese EV manufacturers in either fully hidden or semi-hidden forms, as noted in a CNEV Post report. Today, about 60% of top-selling EVs in China use the design. Chinese regulators have stated that the designs pose safety risks, particularly in crashes or power failures where doors may not open from the inside or outside. Authorities cited multiple fatal incidents in which occupants or rescuers were unable to open vehicle doors after collisions. One high-profile case occurred last October, when a Xiaomi SU7, a vehicle designed to be a competitor to the Tesla Model 3, caught fire following a crash in Chengdu in southwest China. The driver died after bystanders were unable to open the doors. The incident sparked intense scrutiny over the SU7’s Tesla-inspired door handles. The rule effectively ends a design trend pioneered by Tesla and widely adopted across China’s electric vehicle market. China bans hidden door handles China’s Ministry of Industry and Information Technology (MIIT) noted that the new mandatory national auto safety standard on EV door handles will take effect on January 1, 2027. For models that have already received approval and are scheduled for launch, automakers will be allowed to complete required design changes by January 2029. Under the new rules, exterior door handles must remain operable even in scenarios involving irreversible restraint system failures or thermal runaway incidents in the battery pack. Doors must also be capable of opening even if the vehicle loses electrical power. Interior doors must include at least one independent mechanical release handle per door as well.Advertisement Safety concerns drive rollback Hidden and electrically actuated door handles have become mainstream in recent years as EV makers pursued cleaner styling and improved aerodynamics. Tesla pioneered the hidden handle design, and it was adopted by most Chinese EV manufacturers in either fully hidden or semi-hidden forms, as noted in a CNEV Post report. Today, about 60% of top-selling EVs in China use the design. Chinese regulators have stated that the designs pose safety risks, particularly in crashes or power failures where doors may not open from the inside or outside. Authorities cited multiple fatal incidents in which occupants or rescuers were unable to open vehicle doors after collisions. One high-profile case occurred last October, when a Xiaomi SU7, a vehicle designed to be a competitor to the Tesla Model 3, caught fire following a crash in Chengdu in southwest China. The driver died after bystanders were unable to open the doors. The incident sparked intense scrutiny over the SU7’s Tesla-inspired door handles. China’s Ministry of Industry and Information Technology (MIIT) noted that the new mandatory national auto safety standard on EV door handles will take effect on January 1, 2027. For models that have already received approval and are scheduled for launch, automakers will be allowed to complete required design changes by January 2029. Under the new rules, exterior door handles must remain operable even in scenarios involving irreversible restraint system failures or thermal runaway incidents in the battery pack. Doors must also be capable of opening even if the vehicle loses electrical power. Interior doors must include at least one independent mechanical release handle per door as well.Advertisement Safety concerns drive rollback Hidden and electrically actuated door handles have become mainstream in recent years as EV makers pursued cleaner styling and improved aerodynamics. Tesla pioneered the hidden handle design, and it was adopted by most Chinese EV manufacturers in either fully hidden or semi-hidden forms, as noted in a CNEV Post report. Today, about 60% of top-selling EVs in China use the design. Chinese regulators have stated that the designs pose safety risks, particularly in crashes or power failures where doors may not open from the inside or outside. Authorities cited multiple fatal incidents in which occupants or rescuers were unable to open vehicle doors after collisions. One high-profile case occurred last October, when a Xiaomi SU7, a vehicle designed to be a competitor to the Tesla Model 3, caught fire following a crash in Chengdu in southwest China. The driver died after bystanders were unable to open the doors. The incident sparked intense scrutiny over the SU7’s Tesla-inspired door handles. Under the new rules, exterior door handles must remain operable even in scenarios involving irreversible restraint system failures or thermal runaway incidents in the battery pack. Doors must also be capable of opening even if the vehicle loses electrical power. Interior doors must include at least one independent mechanical release handle per door as well.Advertisement Safety concerns drive rollback Hidden and electrically actuated door handles have become mainstream in recent years as EV makers pursued cleaner styling and improved aerodynamics. Tesla pioneered the hidden handle design, and it was adopted by most Chinese EV manufacturers in either fully hidden or semi-hidden forms, as noted in a CNEV Post report. Today, about 60% of top-selling EVs in China use the design. Chinese regulators have stated that the designs pose safety risks, particularly in crashes or power failures where doors may not open from the inside or outside. Authorities cited multiple fatal incidents in which occupants or rescuers were unable to open vehicle doors after collisions. One high-profile case occurred last October, when a Xiaomi SU7, a vehicle designed to be a competitor to the Tesla Model 3, caught fire following a crash in Chengdu in southwest China. The driver died after bystanders were unable to open the doors. The incident sparked intense scrutiny over the SU7’s Tesla-inspired door handles. Hidden and electrically actuated door handles have become mainstream in recent years as EV makers pursued cleaner styling and improved aerodynamics. Tesla pioneered the hidden handle design, and it was adopted by most Chinese EV manufacturers in either fully hidden or semi-hidden forms, as noted in a CNEV Post report. Today, about 60% of top-selling EVs in China use the design. Chinese regulators have stated that the designs pose safety risks, particularly in crashes or power failures where doors may not open from the inside or outside. Authorities cited multiple fatal incidents in which occupants or rescuers were unable to open vehicle doors after collisions. One high-profile case occurred last October, when a Xiaomi SU7, a vehicle designed to be a competitor to the Tesla Model 3, caught fire following a crash in Chengdu in southwest China. The driver died after bystanders were unable to open the doors. The incident sparked intense scrutiny over the SU7’s Tesla-inspired door handles. Chinese regulators have stated that the designs pose safety risks, particularly in crashes or power failures where doors may not open from the inside or outside. Authorities cited multiple fatal incidents in which occupants or rescuers were unable to open vehicle doors after collisions. One high-profile case occurred last October, when a Xiaomi SU7, a vehicle designed to be a competitor to the Tesla Model 3, caught fire following a crash in Chengdu in southwest China. The driver died after bystanders were unable to open the doors. The incident sparked intense scrutiny over the SU7’s Tesla-inspired door handles. One high-profile case occurred last October, when a Xiaomi SU7, a vehicle designed to be a competitor to the Tesla Model 3, caught fire following a crash in Chengdu in southwest China. The driver died after bystanders were unable to open the doors. The incident sparked intense scrutiny over the SU7’s Tesla-inspired door handles. The update was posted by Tesla China, which competes in the world’s most competitive electric vehicle market. Published on By Tesla’s global fleet has now exceeded 9 million vehicles, a major milestone for the electric vehicle maker. The update was posted by Tesla China, which competes in the world’s most competitive electric vehicle market. Tesla’s global fleet crosses 9 million vehicles The milestone was highlighted in a graphic shared by Tesla China, which thanked the over nine million Tesla owners worldwide for their support over the years. To celebrate the milestone, Tesla China announced several incentives for select owners, from Model Y L test drives to Tesla Bot Premium Gift Sets to Supercharging perks. The milestone comes 16 years after the company started delivering its first vehicle, the original Tesla Roadster, as observed by members of the Tesla community. The first production Roadster was delivered to Elon Musk, who was serving as chairman at the time.Advertisement Reaching a global fleet of more than 9 million vehicles reflects the cumulative impact of Tesla’s growth over the past decade, particularly following the introduction of high-volume models such as the Model 3 and Model Y. The Model 3 and Model Y have allowed Tesla to transform from a niche automaker into one of the world’s largest producers of electric cars. GOOD NEWS 🚨 Tesla's global fleet has now surpassed 9 million vehicles—a milestone traces back to February 2008, when the company delivered its very first car, the Roadster (production unit P1), to its initial customer: @elonmusk, who was serving as chairman at the time 🔥 pic.twitter.com/wDgaK1jCdj— Ming (@tslaming) February 3, 2026 Strong China sales help drive fleet growth Tesla’s expanding global footprint has been supported by solid performance in China, where the company posted a strong finish to 2025. In December, the Model Y ranked as the country’s top-selling new energy vehicle, as per sales data compiled by Chinese auto industry aggregator Yiche. The Model Y led China’s NEV rankings with approximately 65,874 units sold during the month, outperforming a field dominated by domestic manufacturers such as BYD, SAIC-GM-Wuling, and Xiaomi. Tesla’s Model 3 also delivered an impressive result, ranking eighth overall with just under 28,000 units sold, ahead of numerous locally produced competitors despite its premium pricing. Tesla China’s broader performance in December was equally notable. The company sold 97,171 vehicles wholesale during the month, based on data from the China Passenger Car Association. The result marked Tesla China’s second-highest monthly total on record, trailing only November 2022’s peak of 100,291 units.Advertisement The update was posted by Tesla China, which competes in the world’s most competitive electric vehicle market. Tesla’s global fleet crosses 9 million vehicles The milestone was highlighted in a graphic shared by Tesla China, which thanked the over nine million Tesla owners worldwide for their support over the years. To celebrate the milestone, Tesla China announced several incentives for select owners, from Model Y L test drives to Tesla Bot Premium Gift Sets to Supercharging perks. The milestone comes 16 years after the company started delivering its first vehicle, the original Tesla Roadster, as observed by members of the Tesla community. The first production Roadster was delivered to Elon Musk, who was serving as chairman at the time.Advertisement Reaching a global fleet of more than 9 million vehicles reflects the cumulative impact of Tesla’s growth over the past decade, particularly following the introduction of high-volume models such as the Model 3 and Model Y. The Model 3 and Model Y have allowed Tesla to transform from a niche automaker into one of the world’s largest producers of electric cars. GOOD NEWS 🚨 Tesla's global fleet has now surpassed 9 million vehicles—a milestone traces back to February 2008, when the company delivered its very first car, the Roadster (production unit P1), to its initial customer: @elonmusk, who was serving as chairman at the time 🔥 pic.twitter.com/wDgaK1jCdj— Ming (@tslaming) February 3, 2026 Strong China sales help drive fleet growth Tesla’s expanding global footprint has been supported by solid performance in China, where the company posted a strong finish to 2025. In December, the Model Y ranked as the country’s top-selling new energy vehicle, as per sales data compiled by Chinese auto industry aggregator Yiche. The Model Y led China’s NEV rankings with approximately 65,874 units sold during the month, outperforming a field dominated by domestic manufacturers such as BYD, SAIC-GM-Wuling, and Xiaomi. Tesla’s Model 3 also delivered an impressive result, ranking eighth overall with just under 28,000 units sold, ahead of numerous locally produced competitors despite its premium pricing. Tesla China’s broader performance in December was equally notable. The company sold 97,171 vehicles wholesale during the month, based on data from the China Passenger Car Association. The result marked Tesla China’s second-highest monthly total on record, trailing only November 2022’s peak of 100,291 units.Advertisement The milestone was highlighted in a graphic shared by Tesla China, which thanked the over nine million Tesla owners worldwide for their support over the years. To celebrate the milestone, Tesla China announced several incentives for select owners, from Model Y L test drives to Tesla Bot Premium Gift Sets to Supercharging perks. The milestone comes 16 years after the company started delivering its first vehicle, the original Tesla Roadster, as observed by members of the Tesla community. The first production Roadster was delivered to Elon Musk, who was serving as chairman at the time.Advertisement Reaching a global fleet of more than 9 million vehicles reflects the cumulative impact of Tesla’s growth over the past decade, particularly following the introduction of high-volume models such as the Model 3 and Model Y. The Model 3 and Model Y have allowed Tesla to transform from a niche automaker into one of the world’s largest producers of electric cars. GOOD NEWS 🚨 Tesla's global fleet has now surpassed 9 million vehicles—a milestone traces back to February 2008, when the company delivered its very first car, the Roadster (production unit P1), to its initial customer: @elonmusk, who was serving as chairman at the time 🔥 pic.twitter.com/wDgaK1jCdj— Ming (@tslaming) February 3, 2026 Strong China sales help drive fleet growth Tesla’s expanding global footprint has been supported by solid performance in China, where the company posted a strong finish to 2025. In December, the Model Y ranked as the country’s top-selling new energy vehicle, as per sales data compiled by Chinese auto industry aggregator Yiche. The Model Y led China’s NEV rankings with approximately 65,874 units sold during the month, outperforming a field dominated by domestic manufacturers such as BYD, SAIC-GM-Wuling, and Xiaomi. Tesla’s Model 3 also delivered an impressive result, ranking eighth overall with just under 28,000 units sold, ahead of numerous locally produced competitors despite its premium pricing. Tesla China’s broader performance in December was equally notable. The company sold 97,171 vehicles wholesale during the month, based on data from the China Passenger Car Association. The result marked Tesla China’s second-highest monthly total on record, trailing only November 2022’s peak of 100,291 units.Advertisement The milestone comes 16 years after the company started delivering its first vehicle, the original Tesla Roadster, as observed by members of the Tesla community. The first production Roadster was delivered to Elon Musk, who was serving as chairman at the time.Advertisement Reaching a global fleet of more than 9 million vehicles reflects the cumulative impact of Tesla’s growth over the past decade, particularly following the introduction of high-volume models such as the Model 3 and Model Y. The Model 3 and Model Y have allowed Tesla to transform from a niche automaker into one of the world’s largest producers of electric cars. GOOD NEWS 🚨 Tesla's global fleet has now surpassed 9 million vehicles—a milestone traces back to February 2008, when the company delivered its very first car, the Roadster (production unit P1), to its initial customer: @elonmusk, who was serving as chairman at the time 🔥 pic.twitter.com/wDgaK1jCdj— Ming (@tslaming) February 3, 2026 Strong China sales help drive fleet growth Tesla’s expanding global footprint has been supported by solid performance in China, where the company posted a strong finish to 2025. In December, the Model Y ranked as the country’s top-selling new energy vehicle, as per sales data compiled by Chinese auto industry aggregator Yiche. The Model Y led China’s NEV rankings with approximately 65,874 units sold during the month, outperforming a field dominated by domestic manufacturers such as BYD, SAIC-GM-Wuling, and Xiaomi. Tesla’s Model 3 also delivered an impressive result, ranking eighth overall with just under 28,000 units sold, ahead of numerous locally produced competitors despite its premium pricing. Tesla China’s broader performance in December was equally notable. The company sold 97,171 vehicles wholesale during the month, based on data from the China Passenger Car Association. The result marked Tesla China’s second-highest monthly total on record, trailing only November 2022’s peak of 100,291 units.Advertisement Reaching a global fleet of more than 9 million vehicles reflects the cumulative impact of Tesla’s growth over the past decade, particularly following the introduction of high-volume models such as the Model 3 and Model Y. The Model 3 and Model Y have allowed Tesla to transform from a niche automaker into one of the world’s largest producers of electric cars. GOOD NEWS 🚨 Tesla's global fleet has now surpassed 9 million vehicles—a milestone traces back to February 2008, when the company delivered its very first car, the Roadster (production unit P1), to its initial customer: @elonmusk, who was serving as chairman at the time 🔥 pic.twitter.com/wDgaK1jCdj— Ming (@tslaming) February 3, 2026 Strong China sales help drive fleet growth Tesla’s expanding global footprint has been supported by solid performance in China, where the company posted a strong finish to 2025. In December, the Model Y ranked as the country’s top-selling new energy vehicle, as per sales data compiled by Chinese auto industry aggregator Yiche. The Model Y led China’s NEV rankings with approximately 65,874 units sold during the month, outperforming a field dominated by domestic manufacturers such as BYD, SAIC-GM-Wuling, and Xiaomi. Tesla’s Model 3 also delivered an impressive result, ranking eighth overall with just under 28,000 units sold, ahead of numerous locally produced competitors despite its premium pricing. Tesla China’s broader performance in December was equally notable. The company sold 97,171 vehicles wholesale during the month, based on data from the China Passenger Car Association. The result marked Tesla China’s second-highest monthly total on record, trailing only November 2022’s peak of 100,291 units.Advertisement GOOD NEWS 🚨 Tesla's global fleet has now surpassed 9 million vehicles—a milestone traces back to February 2008, when the company delivered its very first car, the Roadster (production unit P1), to its initial customer: @elonmusk, who was serving as chairman at the time 🔥 pic.twitter.com/wDgaK1jCdj— Ming (@tslaming) February 3, 2026 Tesla’s expanding global footprint has been supported by solid performance in China, where the company posted a strong finish to 2025. In December, the Model Y ranked as the country’s top-selling new energy vehicle, as per sales data compiled by Chinese auto industry aggregator Yiche. The Model Y led China’s NEV rankings with approximately 65,874 units sold during the month, outperforming a field dominated by domestic manufacturers such as BYD, SAIC-GM-Wuling, and Xiaomi. Tesla’s Model 3 also delivered an impressive result, ranking eighth overall with just under 28,000 units sold, ahead of numerous locally produced competitors despite its premium pricing. Tesla China’s broader performance in December was equally notable. The company sold 97,171 vehicles wholesale during the month, based on data from the China Passenger Car Association. The result marked Tesla China’s second-highest monthly total on record, trailing only November 2022’s peak of 100,291 units.Advertisement The Model Y led China’s NEV rankings with approximately 65,874 units sold during the month, outperforming a field dominated by domestic manufacturers such as BYD, SAIC-GM-Wuling, and Xiaomi. Tesla’s Model 3 also delivered an impressive result, ranking eighth overall with just under 28,000 units sold, ahead of numerous locally produced competitors despite its premium pricing. Tesla China’s broader performance in December was equally notable. The company sold 97,171 vehicles wholesale during the month, based on data from the China Passenger Car Association. The result marked Tesla China’s second-highest monthly total on record, trailing only November 2022’s peak of 100,291 units.Advertisement Tesla China’s broader performance in December was equally notable. The company sold 97,171 vehicles wholesale during the month, based on data from the China Passenger Car Association. The result marked Tesla China’s second-highest monthly total on record, trailing only November 2022’s peak of 100,291 units.Advertisement How to give your Tesla a Custom Lovk Sound! Easy tutorial!! #tesla #teslatok #teslalocksound Copyright © TESLARATI. All rights reserved.
Images (1): 
|
|||||
| Скачать War Robots 11.7.0 для Android, iPhone / iPad, iPad | https://trashbox.ru/link/walking-war-ro… | 1 | Feb 03, 2026 00:03 | active | |
Скачать War Robots 11.7.0 для Android, iPhone / iPad, iPadURL: https://trashbox.ru/link/walking-war-robots-android Description: Walking War Robots — многопользовательский шутер с PvP-боями в режиме реального времени долгое время доступный только владельцам яблочной продукции, наконец-то стал доступен и для андроид устройств. Content:
Walking War Robots — многопользовательский шутер с PvP-боями в режиме реального времени долгое время доступный только владельцам яблочной продукции, наконец-то стал доступен и для андроид устройств. Walking War Robots — это захватывающая дух стрелялка между группами игроков 6 против 6. По стилю игра напоминает Team Fortress, когда на поле встречаются две команды и где для победы необходимо уничтожить соперника или удержать как можно большее число маяков. Walking War Robots предоставляет огромные возможности для реализации различных боевых стратегий и тактик. В распоряжении игрока представлены 13 уникальных боевых роботов и 19 типов вооружений, которые можно комбинировать между собой, добиваясь тех или иных свойств. В игре есть четыре карты с разнообразным рельефом, однако отсутствует возможность выбора карты — они выдаются рандомно. Перед стартом боя у игрока есть несколько секунд, чтобы определиться с каким роботом рвануть в бой. Хотя одновременно игрок управляет только одним роботом, всего с собой в бой можно взять целых пять, и менять их, в случае повреждения робота. Так как бои ведутся в режиме реального времени, для игры является критичным наличие непрерывного и стабильного интернет соединения. Один бой длится не более 10 минут, но может закончиться и раньше, если, например, уничтожены все роботы из команды противника. Особенности игры Walking War Robots:
Images (1): 
|
|||||
| How Boston Dynamics’ humanoid robot brain adapts to factory moves | https://interestingengineering.com/ai-r… | 1 | Feb 02, 2026 16:01 | active | |
How Boston Dynamics’ humanoid robot brain adapts to factory movesURL: https://interestingengineering.com/ai-robotics/atlas-humanoid-robot-brain-masters-factory-moves Description: Boston Dynamics reveals how software and learning-based AI will power Atlas for flexible, real-world manufacturing work. Content:
From daily news and career tips to monthly insights on AI, sustainability, software, and more—pick what matters and get it in your inbox. Access expert insights, exclusive content, and a deeper dive into engineering and innovation. Engineering-inspired textiles, mugs, hats, and thoughtful gifts We connect top engineering talent with the world's most innovative companies. We empower professionals with advanced engineering and tech education to grow careers. We recognize outstanding achievements in engineering, innovation, and technology. All Rights Reserved, IE Media, Inc. Follow Us On Access expert insights, exclusive content, and a deeper dive into engineering and innovation. Engineering-inspired textiles, mugs, hats, and thoughtful gifts We connect top engineering talent with the world's most innovative companies We empower professionals with advanced engineering and tech education to grow careers. We recognize outstanding achievements in engineering, innovation, and technology. All Rights Reserved, IE Media, Inc. Atlas is being trained using teleoperation, simulated reinforcement learning, and human observation to build adaptable factory intelligence. Robotics player Boston Dynamics has offered its clearest look yet at how software will power its next-generation humanoid robot, the Atlas. In a 40-minute technical briefing posted on the company’s YouTube channel, senior leaders detail the company’s approach to building intelligence for real-world factory work. The discussion focused on what Boston Dynamics calls the “humanoid mission in manufacturing,” outlining plans to equip Atlas with a flexible, general-purpose control system suited to complex industrial settings. Rather than relying on hand-coded movements, the company is embracing learning-based methods, enabling the robot to acquire skills through demonstrations, feedback, and refinement—an approach designed to handle the unpredictability of modern production floors. Last week, Boston Dynamics explained Atlas’s ground recovery, revealing why the humanoid rises with contorted movements rather than standing like a human. The value of humanoid robots in industrial settings has long been questioned, particularly when simpler machines such as robotic arms or wheeled systems can perform many factory tasks. Boston Dynamics argues the challenge is not capability, but economics. In highly flexible manufacturing environments, such as automotive plants producing multiple vehicle models with thousands of part variations, traditional automation becomes prohibitively slow and costly. Designing and integrating a custom machine for a single task can take a year and cost more than a million dollars, making large-scale automation of every task impractical, Humanoids Daily reports. To escape what it describes as the limits of “hard automation,” the company is betting on a reprogrammable, general-purpose humanoid that can be redeployed in days rather than engineered over years. This strategy aligns with its goal of deploying robots at production scale rather than as isolated demonstrations. Achieving that level of adaptability requires a shift away from hand-coded motion planning toward learning-based methods, where robots improve through training, feedback, and correction. Boston Dynamics has outlined three parallel approaches to building Atlas’s intelligence. One relies on teleoperation, where human operators guide the robot through tasks using virtual reality, producing highly accurate but difficult-to-scale training data. A second approach uses reinforcement learning in simulation, allowing Atlas to practice millions of movements virtually, particularly for dynamic or high-precision actions. The third, longer-term path focuses on observation, training robots to learn physical intuition and task understanding by watching humans perform activities, potentially through large video datasets. Boston Dynamics is taking a hybrid approach to robot intelligence rather than relying on a single, end-to-end AI model. The company has ruled out a pure “pixels-to-torques” system, in which a single neural network would directly convert camera data into motor commands. Instead, its Atlas humanoid is built around a layered control structure inspired by human cognition and motor control. In this framework, a high-level decision system processes visual information and generates abstract movement goals, such as where to step or how to position a hand. These instructions are then handled by a separate, fast-acting control layer responsible for balance, coordination, and physical constraints. By separating decision-making from motor execution, the robot avoids having to relearn basic physics, such as gravity and momentum, at the AI level, improving stability and efficiency. Similar architectures are being explored across the humanoid robotics sector. Beyond software design, Boston Dynamics emphasized the strategic role of Hyundai Motor Group. The partnership extends beyond deploying robots onto factory floors, with both companies working to redesign automotive plants around humanoid systems. Hyundai contributes large-scale manufacturing environments and long-term infrastructure investment, while Boston Dynamics concentrates on solving complex manipulation tasks required in vehicle assembly, reports Humanoids Daily. The presentation ended with a clear signal of the company’s priorities: as the all-electric Atlas hardware matures, the focus is shifting toward building the intelligence behind it. Boston Dynamics is actively seeking machine learning talent, underscoring that software development will define the next phase of humanoid deployment. Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen's College, Delhi University, and a PG diploma in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers, and automotive magazines. In his spare time, he likes to go off-roading, engage in political discourse, travel, and teach languages. Premium Follow
Images (1): 
|
|||||
| Vidéo : le nouveau robot de Boston Dynamics va vous … | https://www.lebigdata.fr/video-le-nouve… | 1 | Feb 02, 2026 16:01 | active | |
Vidéo : le nouveau robot de Boston Dynamics va vous laisser sans voixURL: https://www.lebigdata.fr/video-le-nouveau-robot-de-boston-dynamics-va-vous-laisser-sans-voix Description: Le CES nous en a déjà montré beaucoup. Mais la démonstration du nouveau robot de Boston Dynamics a fait basculer l’ambiance. Content:
Tinah F. 8 janvier 2026 2 minutes de lecture Robotique Le CES nous en a déjà montré beaucoup. Mais la démonstration du nouveau robot de Boston Dynamics a fait basculer l’ambiance. Troublante, fascinante, sa vidéo est devenue virale en quelques heures. Le monde de la robotique évolue à grande vitesse. Pour certains, ces machines représentent un progrès fascinant. Pour d’autres, elles suscitent encore méfiance et inquiétude. Mais ce qui est sûr, c’est qu’elles ne laissent plus personne indifférent. Et au CES de Las Vegas, Atlas, le robot humanoïde de Boston Dynamics, a mis tout le monde d’accord. Sa démonstration a marqué les esprits par son audace et le niveau d’innovation atteint par les ingénieurs de l’entreprise. Présenté en direct sur scène lors du CES de Las Vegas, le robot de Boston Dynamics a livré une performance aussi spectaculaire que troublante. Boston Dynamics debuted its next-generation Atlas humanoid robot at CES in Las Vegas pic.twitter.com/7qSKHgrAG0 Comme vous pouvez le voir sur la vidéo ci-dessus, Atlas ne marche pas simplement comme un humain bien entraîné. Il se contorsionne et pivote. Il se tord dans des angles que le corps humain ne pourrait jamais encaisser. Atlas avance sur scène avec assurance, puis commence à faire tourner ses mains comme des perceuses industrielles. Sa tête pivote sur elle-même. Son torse suit, dans une rotation complète qui brise toute illusion d’humanité. L’atout central de cette nouvelle version d’Atlas, ce sont ses articulations à rotation continue. Ses hanches, ses poignets et même son cou peuvent pivoter à 360 degrés, sans aucune contrainte mécanique apparente. Vous vous demandez à quoi servent tous ces mouvements improbables ? Rassurez‑vous, Boston Dynamics a pensé à tout. Cette liberté de rotation permet à Atlas de réaliser des tâches complexes avec une précision étonnante. Il est donc en mesure de manipuler des pièces automobiles ou d’exécuter des gestes techniques millimétrés. En plus, avec ses 1,88 mètre et 90 kilos, il a la carrure idéale pour s’attaquer à des tâches complexes. On a déjà vu des robots reproduire au millimètre les gestes de leur contrôleur. Avec ce robot de Boston Dynamics, c’est autre chose. Ses mouvements surprenants sont maîtrisés, même quand il tord ses bras ou pivote sur lui-même. Or, tout est contrôlé. Boston Dynamics Atlas robot movements up close #CES2026 pic.twitter.com/AVtZjjc0kL Pour Robert Playter, le PDG de Boston Dynamics, l’objectif n’est pas de copier l’humain à l’identique. Mais de combiner le meilleur de la nature avec ce que la robotique sait faire de mieux. Atlas s’autorise ainsi des libertés là où notre anatomie impose des limites. Le plus intéressant dans tout cela ? Derrière le show, Boston Dynamics prépare surtout le terrain pour la commercialisation d’Atlas. Une version prête à l’emploi a d’ailleurs été officiellement annoncée. L’entreprise, désormais sous l’aile de Hyundai, vise l’industrie. Alors, quand pourra-t-on le voir au travail ? Le premier déploiement reste prévu dans une usine de véhicules électriques du constructeur coréen, d’ici 2028. Quant au prix, il reste pour l’instant bien gardé. 28 janvier 2026 26 janvier 2026 26 janvier 2026 Votre adresse e-mail ne sera pas publiée. Les champs obligatoires sont indiqués avec * Commentaire * Nom * E-mail * Rejoignez nos 100 000 passionnés et experts et recevez en avant-première les dernières tendances de l’intelligence artificielle🔥 Accueil > Robotique > Vidéo : le nouveau robot de Boston Dynamics va vous laisser sans voix Rejoignez nos 100 000 passionnés et experts et recevez en avant-première les dernières tendances de l’intelligence artificielle🔥 Rejoins nos 100 000 passionnés et experts et reçois en avant-première les dernières tendances de l’intelligence artificielle🔥
Images (1): 
|
|||||
| Boston Dynamics unveils production-ready version of Atlas robot at CES … | https://www.engadget.com/big-tech/bosto… | 1 | Feb 02, 2026 16:01 | active | |
Boston Dynamics unveils production-ready version of Atlas robot at CES 2026Description: Boston Dynamics is making the final version of Atlas available to Hyundai and Google DeepMind first. Content:
After years of testing its humanoid robot (and forcing it to dance), Boston Dynamics' Atlas is entering production. The robotics company said at CES 2026 that the final product version of the robot is being built now, and the first companies that will receive deployments are Hyundai, Boston Dynamics' majority shareholder, and Google DeepMind, the firm's newly minted AI partner. This final enterprise version of Atlas "can perform a wide array of industrial tasks," according to Boston Dynamics, and is specifically designed with consistency and reliability in mind. Atlas can work autonomously, via a teleoperator or with "a tablet steering interface," and the robot is both strong and durable. Boston Dynamics says Atlas has a reach of up to 7.5 feet, the ability to lift 110 pounds and can operate at temperatures ranging from minus 4 to 104 degrees Fahrenheit. "This is the best robot we have ever built," Boston Dynamics CEO Robert Playter said in the Atlas announcement. "Atlas is going to revolutionize the way industry works, and it marks the first step toward a long-term goal we have dreamed about since we were children." Boston Dynamics has been publicly demoing its work on humanoid robots since at least 2011, when it first debuted Atlas as a DARPA project. Since then, the robot has gone through multiple prototypes and revisions, most notably switching from a hydraulic design to an all-electric design in 2024. Later that year, Boston Dynamics demonstrated the robot's ability to manipulate car parts, which appears to be one of the first ways Atlas will be put to work. Hyundai plans to use Atlas in its car plants in 2028, focused on tasks like parts sequencing. In 2030, the car maker hopes to have the robot's responsibilities "extend to component assembly, and over time, Atlas will also take on tasks involving repetitive motions, heavy loads, and other complex operations," Hyundai says. Google DeepMind, meanwhile, is receiving Atlas robots so it can work on integrating its Gemini Robotics AI foundation models into Boston Dynamics' system. © 2026 Yahoo. All rights reserved. and
Images (1): 
|
|||||
| Boston Dynamics robot makes an appearance in Sam Adams’ Super … | https://www.bostonglobe.com/2022/02/03/… | 0 | Feb 02, 2026 16:01 | active | |
Boston Dynamics robot makes an appearance in Sam Adams’ Super Bowl commercialDescription: The two local companies are teaming up to pitch their products during the big game. Content: |
|||||
| Boston Dynamics beats Tesla to the humanoid robot punch • … | https://www.theregister.com/2026/01/06/… | 10 | Feb 02, 2026 16:01 | active | |
Boston Dynamics beats Tesla to the humanoid robot punch • The RegisterURL: https://www.theregister.com/2026/01/06/boston_dynamics_atlas_production/ Description: CES 2026: Atlas will be deployed to Hyundai and Google facilities this year Content:
CES 2026 Remember when Elon Musk predicted that there would be thousands of Optimus robots at Tesla factories by the end of 2025? Well, that didn't happen, but competitor Boston Dynamics has just announced that its humanoid robot, Atlas, is going to the big time. Not only is Boston Dynamics beginning commercial production of the final version of Atlas, but it's also solidified plans to deploy tens of thousands of Atlas units at Hyundai Motor Group manufacturing facilities. Hyundai, Boston Dynamics' majority shareholder, will start with deployment of Atlas at its Robot Metaplant Application Center in the coming months. Boston Dynamics noted that Hyundai's $26 billion investment in US manufacturing announced last year will also include a robotics factory able to produce 30,000 bots a year, many of which will presumably be Atlas units based on its context in the Atlas press material. Youtube Video In addition to its planned Hyundai deployments this year, Boston Dynamics also announced a partnership with Google DeepMind at CES that will see the pair working out how to integrate Gemini Robotics AI foundation models into Atlas to, according to Boston Dynamics, "give the robot greater cognitive capabilities." An Atlas prototype conducting part sequencing work at a Hyundai factory as part of earlier proof of concept work - Click to enlarge Those two commitments mean that all the Atlas units slated for production this year are spoken for, but Boston Dynamics noted it's planning to add additional customers in early 2027. We asked if Boston Dynamics had any customers lined up for 2027, but it declined to name any. We've known the all-electric, commercial version of Atlas was coming since 2024, when Boston Dynamics retired the old version in favor of a prototype that looks generally like what the robotics leader unveiled at CES this week. Speaking of 2024, Boston Dynamics seemed to take direct aim at some other humanoid robot manufacturers when it cited its late entry into the game. "Boston Dynamics only announced its intention to build a commercial humanoid in 2024, after it became clear that recent AI advances had accelerated the pace of how robots could be trained and deployed into real-world applications," the company said in a press release. You may recall Tesla AI Day 2021, when Elon Musk embarrassingly trotted out a guy in a morph suit to demonstrate his dream of humanoid robots able to serve as replacements for human labor. By the following year, Optimus hadn't advanced all that much. Fast-forward to 2025, and Musk was predicting Optimus version 3 prototyped by the end of the year. Not only did that not happen, but Musk's claim Tesla would produce 5,000 to 10,000 Optimus robots in 2025 butted up hard against the embarrassing reality that Optimus isn't only behind the curve, but likely doesn't have any autonomous capabilities at all. Atlas, on the other hand, is now in production and has software that allows it to not only be tele-operated via VR or controlled by a tablet, but also lets it function autonomously. "Atlas is going to revolutionize the way industry works, and it marks the first step toward a long-term goal we have dreamed about since we were children – useful robots that can walk into our homes and help make our lives safer, more productive, and more fulfilling," Boston Dynamics CEO Robert Playter said of the Atlas production launch. The robot has two batteries that it's able to hot-swap on its own, it's able to operate in temperatures as low as -4° F to as hot as 104° F (-20° C to 40° C), is IP67 rated, has 56 degrees of freedom, is padded and has minimal pinch points to reduce the risk of injury to humans operating in the same space as it, and was designed with simple components that can be swapped out for field repairs with minimal time and effort. Atlas is supposedly able to learn autonomously from its environment, and can push its newfound knowledge to other Atlas units in a company's fleet. Atlas also has 360-degree vision to help it spot people before they get too close to its working space, and is designed to pause whenever it could put a person in danger, then continue its work once they're clear. As to it making a leap forward in humanoid robotics with this announcement, Boston Dynamics told us we shouldn't be surprised. "Over a decade ago, we were one of the only companies on the planet putting real R&D into humanoid robots. Now it seems like every week a new company pops up with big plans to make humanoids," a company spokesperson told The Register. "We don’t take it lightly, and if we were going to make a commercial humanoid, we had to be convinced we have a solid plan not only to build something cool, but to build something useful." The hydraulic version of Atlas that the company retired in 2024 had been under development since 2013, and by the end of its run, was capable of doing some impressive stunts. "Our commercialization track record with Spot and Stretch gives us confidence that our commercialization with Atlas will be successful," the company added, noting that its customers are hungry for new Boston Dynamics robots "because they know what to expect." Tesla didn't respond to questions for this story. ® Send us news The Register Biting the hand that feeds IT Copyright. All rights reserved © 1998–2025
Images (10): 
|
|||||
| Boston Dynamics dévoile une vidéo impressionnante de son robot Atlas … | https://www.rtl.be/info/video/834821.as… | 1 | Feb 02, 2026 16:01 | active | |
Boston Dynamics dévoile une vidéo impressionnante de son robot Atlas | RTL InfoURL: https://www.rtl.be/info/video/834821.aspx Content:
Le robot humanoïde de Boston Dynamics, Atlas, fait étalage de ses nouvelles compétences dans vidéo publiée ce mardi 18 janvier. Vous souhaitez nous envoyer une information? Utilisez le formulaire de contact pour nous envoyer vos scoops!
Images (1): 
|
|||||
| Boston Dynamics muestra su robot obrero (video) - Remolacha - … | https://remolacha.net/2026/01/boston-dy… | 1 | Feb 02, 2026 16:01 | active | |
Boston Dynamics muestra su robot obrero (video) - Remolacha - Noticias Republica DominicanaURL: https://remolacha.net/2026/01/boston-dynamics-atlas/ Description: Boston Dynamics EE.UU.–«Nos entusiasma anunciar la versión comercial de nuestro robot Atlas®. Este robot humanoide de nivel empresarial ofrece una fuerza y un rango de movimiento impresionantes, manipulación precisa y una adaptabilidad inteligente, diseñado para impulsar la nueva revolución industrial.» Content:
Boston Dynamics EE.UU.–«Nos entusiasma anunciar la versión comercial de nuestro robot Atlas®. Este robot humanoide de nivel empresarial ofrece una fuerza y un rango de movimiento impresionantes, manipulación precisa y una adaptabilidad inteligente, diseñado para impulsar la nueva revolución industrial.» contáctenos This site is an Amazon Associate and purchases through Amazon links may earn an affiliate commission.
Images (1): 
|
|||||
| Eek! Boston Dynamics’ Robot Dog Can Talk Now [Video] | https://www.2oceansvibe.com/2023/10/27/… | 0 | Feb 02, 2026 16:01 | active | |
Eek! Boston Dynamics’ Robot Dog Can Talk Now [Video]URL: https://www.2oceansvibe.com/2023/10/27/eek-boston-dynamics-robot-dog-can-talk-now-video/ Description: Spot the robot dog built by engineering company Boston Dynamics can now speak thanks to ChatGPT. Content: |
|||||
| SoftBank : Boston Dynamics introduces 'Stretch', new warehouse worker robot | https://www.marketscreener.com/quote/st… | 0 | Feb 02, 2026 16:01 | active | |
SoftBank : Boston Dynamics introduces 'Stretch', new warehouse worker robotDescription: U.S. robotics company Boston Dynamics on Monday unveiled a new robot called Stretch, designed to perform one very specific warehouse job: moving boxes. ... Content: |
|||||
| Cane robot di Boston Dynamics ora fa i salti mortali | https://www.tecnoandroid.it/2025/09/06/… | 1 | Feb 02, 2026 16:01 | active | |
Cane robot di Boston Dynamics ora fa i salti mortaliURL: https://www.tecnoandroid.it/2025/09/06/cane-robot-di-boston-dynamics-ora-fa-salti-mortali-1623061/ Description: SpotMini e i suoi discendenti raggiungono nuovi livelli di agilità grazie a movimenti acrobatici e algoritmi avanzati. Content:
L’evoluzione dei robot quadrupedi continua con Boston Dynamics che si spinge oltre i limiti della robotica. Il suo famoso cane robot ora è in grado di eseguire salti mortali completi. Dopo anni di sviluppo iniziati con SpotMini, questi robot quadrupedi non si limitano più a camminare o correre. Possono affrontare ostacoli complessi e compiere acrobazie sorprendenti, combinando forza, equilibrio e precisione. Il segreto di queste evoluzioni risiede nei sofisticati sensori e negli attuatori ad alta precisione, uniti a algoritmi di intelligenza artificiale che calcolano in tempo reale traiettorie, velocità e punti di appoggio. Ogni salto è ottimizzato per evitare cadute o danni, rendendo il robot sempre più autonomo e versatile nei movimenti. I salti mortali non sono solo incredibile da vedere, indicano un significativo passo avanti nelle capacità operative di questo genere di robot. Robot come Spot possono essere impiegati in ambienti complessi e pericolosi, come zone colpite da disastri ambientali o terreni impervi, dove agilità e reattività sono fondamentali. L’adattamento in tempo reale a superfici irregolari o ostacoli imprevisti aumenta la sicurezza e l’efficienza dei robot nelle missioni sul campo. Oltre alla performance fisica, i sensori permettono al robot di percepire l’ambiente circostante e regolare ogni movimento, trasformando ogni salto in un esempio di coordinazione automatica e precisione meccanica. Il video dei salti mortali conferma la leadership di Boston Dynamics nella robotica avanzata. La combinazione di hardware sofisticato, software intelligente e design meccanico innovativo rende questi robot non solo incredibili, ma anche funzionali in contesti reali. Ogni acrobazia rappresenta un segno di progresso verso applicazioni pratiche sempre più complesse, avvicinando i consumatori ad un futuro in cui i robot quadrupedi potranno agire autonomamente in spazi difficili o pericolosi. Boston Dynamics dimostra così che la robotica moderna non è solo mera curiosità da laboratorio, ma un ambito in rapida evoluzione, pronto a rivoluzionare settori come la logistica, la sicurezza e le operazioni in ambienti estremi. Dal 2017 collaboro con TecnoAndroid, adottando un approccio attento ai dettagli e puntando sempre alla perfezione, per offrire un punto di vista chiaro e preciso sulle ultime novità del settore tech. 2012 – 2023 Tecnoandroid.it – Gestito dalla STARGATE SRLS – P.Iva: 15525681001 Testata telematica quotidiana registrata al Tribunale di Roma CON DECRETO N° 225/2015, editore STARGATE SRLS. Tutti i marchi riportati appartengono ai legittimi proprietari. Questo articolo potrebbe includere collegamenti affiliati: eventuali acquisti o ordini realizzati attraverso questi link contribuiranno a fornire una commissione al nostro sito. Inserisci qualcosa di speciale: Tienimi connesso fino a quando non esco Password dimenticata? Ti sarà inviata una nuova password via email. Hai ricevuto una nuova password? Accedi qui.
Images (1): 
|
|||||
| Boston Dynamics vows to turn Atlas into a 'superhuman' robot … | https://www.digitaltrends.com/computing… | 1 | Feb 02, 2026 16:01 | active | |
Boston Dynamics vows to turn Atlas into a 'superhuman' robot - Digital TrendsURL: https://www.digitaltrends.com/computing/boston-dynamics-vows-to-turn-atlas-into-a-superhuman-robot/ Description: CES 2026 Read and watch our complete CES coverage here Boston Dynamics is a pioneer in the humanoid robot sector, with Atlas first appearing in 2013 before going on to become the advanced bipedal bot that it is today. Since then, thanks to advances in robotics hardware and AI, a slew of tech companies big […] Content:
Boston Dynamics is a pioneer in the humanoid robot sector, with Atlas first appearing in 2013 before going on to become the advanced bipedal bot that it is today. Since then, thanks to advances in robotics hardware and AI, a slew of tech companies big and small have entered the fray, working at speed to try to become the first to build something deployable at scale for tasks in industrial settings, or even in the home. Boston Dynamics is still very much in the race, and at CES 2026 on Monday the Massachussetts-based company shared a couple of major plans for the Atlas humanoid robot. The first involves Korean automaker Hyundai, Boston Dynamics’ main backer. The goal is to integrate Atlas into Hyundai’s global manufacturing network, starting with pilots at the automaker’s state-of-the-art Metaplant in Georgia. “Atlas will be introduced on processes with proven safety and quality benefits, such as parts sequencing,” the company said in a release. “By 2030, applications will extend to component assembly, and over time, Atlas will also take on tasks involving repetitive motions, heavy loads, and other complex operations — ensuring safer working environments for factory employees.” Boston Dynamics is also partnering with Google’s DeepMind AI research lab to bring more AI smarts to the latest version of Atlas. The technology will provide the humanoid robot with advanced perception, reasoning, and human interaction, with Atlas units already on their way to DeepMind for testing and scaling. “This collaboration will integrate Boston Dynamic’s leadership in robotics with Google DeepMind’s cutting-edge robot AI foundation models, driving the development of breakthrough technologies,” the company said. A two-minute video (top) video, shared by Boston Dynamics on Monday, features clips that show just how far its robots have come over the years. It also claims that Atlas is heading toward becoming a “superhuman robot” that’s “built to perform, built to work.” It adds that it envisions a world where “robots walk with us as helpers and companions to make life easier, safer, and more fulfilling.” Lofty words indeed, but with Boston Dynamics solid experience, as well as its decisive edge enabling fast integration via its Hyundai ownership, few will bet against the company making its vision a reality. Chrome may soon get a new scam-fighting upgrade that leans on Gemini. Google is testing Gemini antiscam protection in Chrome as an extra check that kicks in only after the browser already thinks a site looks risky. This isn’t an always-on system that reviews every page you open. Chrome steps in at higher-risk moments, then sends the flagged page out for deeper analysis, keeping the existing scam defenses in place. Apple's Studio Display is long overdue for a refresh. Launched in 2022, the current model features a 27-inch 5K IPS panel with a 60Hz refresh rate and packs the A13 Bionic chip. Recent leaks suggest that Apple is finally preparing a meaningful upgrade that could bring a new chip, a 120Hz panel, and HDR support. A new report now claims the revamped Studio Display could launch in the coming months. According to Bloomberg's Mark Gurman, Apple's new Studio Display "has been in the works for some time," and is "slated for a launch in the first half of 2026." While Gurman hasn't confirmed an exact date, Apple could unveil the Studio Display refresh as early as March. The company launched the original model in March 2022, and it appeared in a regulatory filing roughly three months before its debut. If you currently have a shiny new MacBook Pro sitting in your digital shopping cart, do yourself a huge favor: close the tab and step away from the credit card. We are officially in the "danger zone" of the Apple buying cycle. All the classic warning signs are flashing neon red, signaling that a refresh isn't just possible - it is imminent. According to the latest Power On newsletter from Bloomberg, Apple is in the final manufacturing stretch. The new machines - internally tagged with the unsexy codenames J714 and J716 - are reportedly already boxed up and sitting in global warehouses, just waiting for the green light. Upgrade your lifestyleDigital Trends helps readers keep tabs on the fast-paced world of tech with all the latest news, fun product reviews, insightful editorials, and one-of-a-kind sneak peeks.
Images (1): 
|
|||||
| Hyundai y Boston Dynamics presentan a Atlas, su robot humanoide | https://sipse.com/tecnologia/hyundai-y-… | 1 | Feb 02, 2026 16:01 | active | |
Hyundai y Boston Dynamics presentan a Atlas, su robot humanoideDescription: Una versión destinada al ensamblaje de automóviles ya se encuentra en producción y será desplegada en 2028 en la planta de Hyundai, en el estado de Georgia. Content:
Una versión destinada al ensamblaje de automóviles ya se encuentra en producción y será desplegada en 2028 en la planta de Hyundai, en el estado de Georgia. Hyundai y Boston Dynamics dieron un paso importante en la carrera por la robótica humanoide al presentar por primera vez en público a Atlas, su robot de tamaño real, durante la feria tecnológica CES. La demostración marcó un momento relevante en la competencia global por desarrollar máquinas con forma humana capaces de realizar tareas propias de las personas, un terreno donde también avanzan empresas como Tesla. “Por primera vez en público, por favor den la bienvenida a Atlas al escenario”, anunció Zachary Jackowski, gerente general de robots humanoides en Boston Dynamics, mientras el robot se incorporaba del suelo frente a decenas de asistentes. Con movimientos fluidos, Atlas caminó durante varios minutos, saludó a la audiencia y giró la cabeza con notable naturalidad, en una escena que despertó asombro y aplausos. Boston Dynamics humanoid robot is next-level. Everybody is playing catch-up. pic.twitter.com/weM15xcWYn Durante la presentación, Jackowski explicó que el robot fue operado de manera remota por un ingeniero únicamente para fines de demostración, aunque la versión final de Atlas está diseñada para moverse de forma autónoma. De hecho, Boston Dynamics confirmó que una versión destinada al ensamblaje de automóviles ya se encuentra en producción y será desplegada en 2028 en la planta de vehículos eléctricos de Hyundai, ubicada cerca de Savannah, en el estado de Georgia. Hyundai, que posee la participación mayoritaria de Boston Dynamics desde 2021, ha reforzado su apuesta por la robótica avanzada. La empresa estadounidense, con sede en Massachusetts, es ampliamente conocida por Spot, el robot con forma de perro que fue su primer producto comercial y que incluso abrió el evento de Hyundai con una coreografía al ritmo de K-pop. NEWS: Boston Dynamics has just released a new video of its upgraded next-generation humanoid robot called Atlas.• 4 hour battery. Self-swappable for continuous operation• 6 feet 2 inches tall• Weight: 198 lbs• 56 total degrees of freedom• Now fully electric, ditching… pic.twitter.com/t9KOlxbaiM Como parte de su estrategia tecnológica, Hyundai también anunció una nueva alianza con DeepMind, la división de inteligencia artificial de Google, que aportará su tecnología a los robots de Boston Dynamics. La colaboración marca un regreso simbólico para Google, que adquirió la empresa en 2013 antes de venderla años después a SoftBank, de donde finalmente pasó a manos de Hyundai. Las demostraciones públicas de robots humanoides siguen siendo poco comunes, debido a que cualquier error suele atraer atención negativa. Por ello, muchas startups prefieren mostrar avances mediante videos cuidadosamente editados en redes sociales. Sin embargo, la presentación de Atlas transcurrió sin contratiempos. Al cierre del evento, el robot realizó un gesto teatral para presentar un modelo estático de una nueva versión en color azul, con ligeros cambios en su diseño. When 60 Minutes visited Boston Dynamics in 2021, Atlas was a bulky, hydraulic robot. Back then, it relied on algorithms written by engineers.Today, Atlas has a sleek, all-electric body and an AI-powered brain, smart enough to pull off hard-to-believe feats autonomously.… pic.twitter.com/9LpfUroeN7 El auge de la inteligencia artificial y los avances en hardware han impulsado una fuerte inversión en el sector de la robótica. No obstante, especialistas coinciden en que aún falta tiempo para que los robots humanoides multifuncionales se integren de manera masiva en fábricas, oficinas o hogares. Con información de AP
Images (1): 
|
|||||